Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 559879
Автор: Питерский
Текст
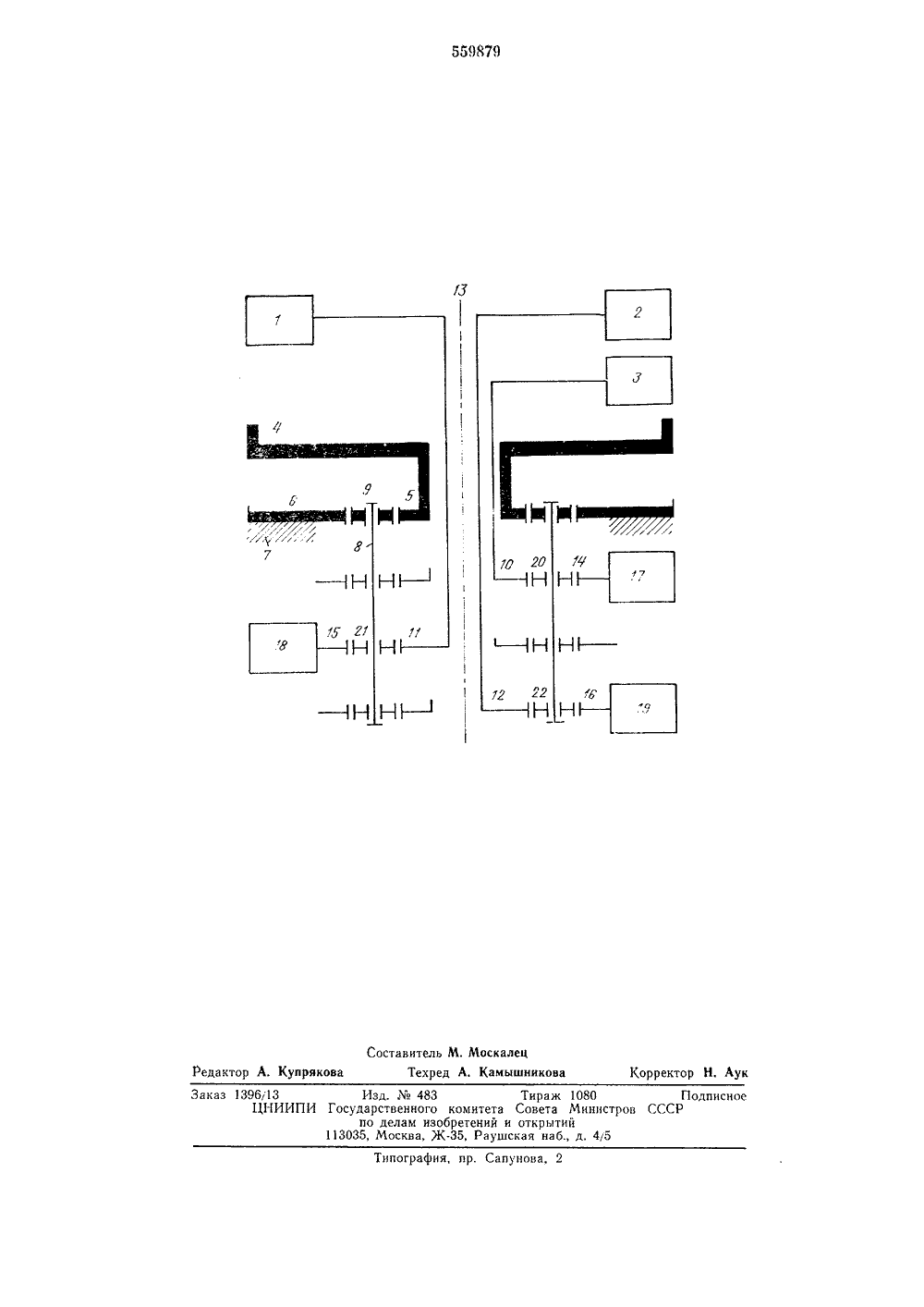
(23) ПриоритетОпубликовано 30.05.77. БюллетеньГосударственныи комитет Совета Министров СССР(53) УДК 621,874(088.8 по делам изобретении и открытий(71) Заявитель Всесоюзный научно-исследовательский институт технической эстетик 54) СИСТЕМА УПРАВЛЕНИЯ Изобретение относится к области подъемных машин, а именно к области управления поворотными кранами, у которых система управления должца обеспечивать передачу управляющих импульсов от датчика управления, находящегося на произвольно вращаемой платформе, к исполнительному механизму, находящемуся на неподвижном основании.Известные технические решения, обеспечивающие указанную передачу управляющих импульсов от датчика управления, как правило, основаны на использовании систем управления электрического или гидравлического типа, в которых относительное вращение датчика управления и исполнительного механизма не препятствует передаче управляющих импульсов.Однако необходимость введения электрических и гидравлических устройств и коммуникаций в конструкцию крана ведет к техническому усложнению машины, снижает ее надежность ц безопасность при увеличении веса, размеров конструкций, а также увеличивает расходы на проектирование, изготовление и эксплуатацию.Извсстцы системы управления, например, краном с поворотной платформой, установленной ца неподвижном осцовании, содержащее датчик управляющих импульсов, планетарные неподачи и исполнительный механизм (1. Однако здесь датчик импульсов, установленный ца неподвижном основании, передает с помощью планетарной передачи управляющие импульсы исполнительному механизму, установленному ца том же основании, что ограничивает возможности практического использования данной системы в поворотных кранах, так как она не может обеспечить никаких иных вариантов передачи управляющих 1 о импульсов, в частности с произвольно вращаемой платформы на неподвижное основание.Цель изобретения - передача импульсовс произвольно вращаемой платформы на неподвижное основание.15 Это достигается тем, что поворотная платформа жестко соединена с солнечной шестерней первой планетарной передачи, водило которой жестко соединено с водилом второй планетарной передачи, солнечная шестерня 20 которой установлена на валу платформы ижестко соединена с датчиком импульсов, а коронная шестерня - с исполнительным механизмом, при этом коронная шестерня первой передачи жестко соединена с основанием, а 25 передачи соосны одна другой.Кроме того, платформа может быть соединена с коронной шестерней первой передачи, а с датчиком импульсов может быть соединена коронная шестерня второй передачи, при 30 этом солнечная шестерня первой передачидолжна быть жестко соединена с основанием, а солнечная шестерня второй передачи - с исполнительным механизмом,С целью передачи и-го количества управляющих импульсов соосно одна другой может быть установлено (и+1) планетарных передач, водила которых жестко соединены друг с другом, где и - целое положительное число.На чертеже представлена схема предложенной системы управления, обеспечивающей передачу импульсов с произвольно вращаемой платформы на неподвижное основание.Система содержит датчики 1 - 3 управляющих импульсов, которые выполнены в виде рычагов, установленных на произвольно вращаемой платформе 4, с которой жестко соединена солнечная шестерня 5 первой планетарной передачи. Коронная шестерня 6 этой передачи жестко установлена на неподвижном основании 7, а водило 8 ее сателлита 9 жестко соединено с водилами соосных передач (на чертеже не показаны). Солнечные шестерни 10 - 12 соосных передач установлены свободно на валу 13 платформы 4 и соединены с датчиками 1 - 3, а коронные шестерни 14 - 16 сопряжены соответственно с исполнительными механизмами 17 - 19 и удерживаемыми в неподвижном состоянии фиксаторами, компенсирующими силы трения, возникающие при обкатке сателлитами 20 - 22 шестерен 10 - 12 и 14 - 16.Управление, например, краном, осуществляется следующим образом,При свободном произвольном вращении платформы 4 сателлиты 20 - 22 обкатывают шестерни 10 - 12 и 14 - 16, которые удерживаются в неподвижном положении фиксаторами.При поступлении управляющего импульса, например на шестерню 10, импульс передается сателлитом 20 шестерне 14, которая приводит в действие исполнительный механизм 17. Таким же образом происходит передача управляющих импульсов от датчиков 1 - 3 исполнительным механизмам 17 - 19. 10 15 20 25 ЗЭ 35 40 45 Система обеспечивает также передачу управляющих импульсов с цеподвцжпого основания на произвольно подвижную платформу. Для этого меняют местами датчик импульсов и исполнительный механизм, соответственно соединяя их со звеньями первой и второй планетарных передач. Формула изобретения1. Система управления, например, краном с поворотной платформой, установленной на неподвижном основании, содержагцая датчик управляющих импульсов, планетарные передачи и исполнительный механизм, о тл и ч аю щ а я с я тем, что, с целью передачи импульсов с произвольно вращаемой платформы на неподвижное основание, платформа жестко соединена с солнечной шестерней первой планетарной передачи, водило которой жестко соединено с водилом второй планетарной передачи, солнечная шестерня которой установлена на валу платформы и жестко соединена с датчиком импульсов, а коронная шестерня - с исполнительным механизмом, при этом коронная шестерня первой передачи жестко соединена с основанием, а передачи соосны одна другой.2. Системы по и. 1, о тл и ч а ю щ а я с я тем, что платформа соединена с коронной шестерней первой передачи, а с датчиком импульсов соединена коронная шестерня второй передачи, при этом солнечная шестерня первой передачи жестко соединена с основанием, а солнечная шестерня второй передачи - с исполнительным механизмом.3. Система по пп, 1 и 2, отл и ч а ю щ а яся тем, что, с целью передачи и-го количества управляющих импульсов, соосно одна другой установлено (и+1) планетарных передач, водила которых жестко соединены друг с другом, где и - целое положительное число,Источники информации, принятые во внимание при экспертизе1. Патент Германии Мо 742529, кл. 35 а 7/01, 1943.559879 Составитель М. МоскалецРедактор А. Купрякова Техред А, Камышникова Корректор Н, Аук Заказ 139613ЦНИИП ография, пр. Сапунова,Изд. М 483 осударственного комитета по делам изобретений 3035, Москва, Ж, Рауш
СмотретьЗаявка
1801623, 26.06.1972
ВСЕСОЮЗНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ ТЕХНИЧЕСКОЙ ЭСТЕТИКИ
ПИТЕРСКИЙ ВАСИЛИЙ БОРИСОВИЧ
МПК / Метки
МПК: B66C 13/40
Метки:
Опубликовано: 30.05.1977
Код ссылки
<a href="https://patents.su/3-559879-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Прибор для передачи импульсов тока

Номер патента: 2204
Опубликовано: 31.01.1927
МПК: H04M 3/26
Метки: импульсов, передачи, прибор
...1 СОНТа)СТОБ, КОНс 1 К МЕЖ;1 У пжинками 18 и 2 с 5 не)руЕвсееся.На Оси 15 сВООО;1 но насажены клаки 24, 25 и 32; первые двд кулака жестко соединены с вумя концентрично рас)вложенными кнопками 34 И 35 (фИГ. 1 И 3). ВЬСТЧПс 110)ЦИВ)И Зд переднюю стенку прибора, а гретий юлак 32 усганавливдется кнопкой 46, поворачГваюпеей ось 47 с зубчатой дугой 40 (фиг. 3 и 4), сцее)ленной с зуц)аГым сестороч 41 жестЕО с)среплен- НЕ)1 С. Кудс 1 КОМ 32, И. НсПСОНЕИ. ЧЕТ- вертый кулак прикреплен к переднеи стенке 4 прибора. С кнопками 34, 35, 4 б связаны указатели Зб, 37 и 54 (фиг. 2). передвигающиеся вдоль ппсалы 38, 55 и 39. Собачка 0 снабжены штифтом 23 (фиг. 1 и 4). когорьо) СобсЧ)Сд ВЫКЛЮЧБЕ)Ся ИЗ СцСГПЛЕНИя с раповиком 19 при нджиче нд нее...
Устройство для передачи импульсов

Номер патента: 248762
Опубликовано: 01.01.1969
Авторы: Алексеев, Ковалевский, Константиновский, Маликов, Северо
МПК: H03H 7/52
...5.Одновременно с этим создается другаяцепь; от источника питания 8 через ключевой элемент б, конденсатор 7, диод 3, передающую линию 4 к источнику питания 8, ПротеО кающпй по этой цепи ток начинает заряжать:аказ 3429 7 Тираж 480 Подписное1 НИИПИ Комитета по делам изооретепий и открытий при Совете Мипистров СССР.москва Ж, Раушская наб., д. 4 5 Типография, пр. Сапупопа, 2 ког 4 дпенсатор 7. Диод 2 в это вреМя заперт, так как к нему приложено напряжение обратной полярности.В передающей линии 4 появляется импульс тока.Диапазон передаваемых импульсов по длительности определяется постоянной времени цепи заряда конденсатора 7. Емкость конденсатора 7 выбирается такой величины, чтобы постоянная времени цепи его заряда была больше максимальной...
Волновая передача с жесткими звеньями

Номер патента: 653458
Опубликовано: 25.03.1979
Авторы: Дидковский, Калинин, Павлище
МПК: F16H 1/00
Метки: волновая, жесткими, звеньями, передача
...звено 4, не "Ефиксированное в осевом направлении, размещено на роликовых подшипниках 5, посаженных на шейки косой втулки, На двухторцовых поверхйостях промежуточногозвена по окружности имеется одинаковоеколичество зубьев 6. Составное подвижное колесо 7, связанное с ведомым валом8, имеет на двух внутренних торцах поодинаковому числу зубьев 9, выполненных в виде шариков 10, расположенных20в соответствующих гнездах. Штифты 11служат для предотвращения вращения промежуточного звена 4.Передача работает следующим образом.При вращении вала 2 промежуточноезвено 4, не.вращаясь, совершает волнообразное качательное движение, обеспечиваявход и зацепление зубьев 9 подвижногоколеса 7 с зубьями 6, находящимися напромежуточном звене. При этом зона...
Релейный распределитель

Номер патента: 1815692
Опубликовано: 15.05.1993
Автор: Попов
МПК: H01H 47/00, H03K 23/74
Метки: распределитель, релейный
...11. Второй замыкающий контакт 7-2 этого реле подго тавливает цепь питания обмотки реле 8второй ячейки коммутации, После указанного переключения релейный распределитель подготовлен к работе.Работа. делителя частоты импульсов надва, При поступлении на вход 12 входногоимпульса, реле 1 срабатывает и переключает свой переключающий контакт 3. При этом срабатывает реле 4-1 делителя частоты импульсов на два по цепи: шина 10. переключающий контакт 3 (его замкнувшееся положение), замкнутое положение переключающего контакта 4-21, обмотка реле 4- 1, шина питания 11. По окончании входного импульса переключающий контакт 3 входного реле 1 возвращения в исходное положение, при этом реле 4-1 самоблокируется через свой замыкающий контакт 4-11, через...
Устройство для усиления и передачи импульсов управления ключами статических преобразователей

Номер патента: 1064430
Опубликовано: 30.12.1983
МПК: H03K 3/02
Метки: импульсов, ключами, передачи, преобразователей, статических, усиления
...при этом число пауз разной длительности припериоде повторения Тй =ЮИ +., выбрано равным Н Первый источник питания для уйввия Юаф может быль выполнен .общим для основных и Й - 1 дополнительных транзисто. 35 ров и снабжен промежуточными выводами.-х уровней напряжения.Трансформатор снабжен М - 1 дополнительными первичными обмотками, к одним концам которых подключены выходные 40 электроды К -1 дополнительных транзисторов, а к другим концам подсоединены промежуточные выводы 1 -х уровней источника иапря. жения, выходной электрод второго основного транзистора подключен к первому концу пер-, 45 внчной обмотки, причем другие выходные электроды всех транзисторов соедннены с край. ним выводом источника питания.На фиг. 1 представлена...
Предыдущий патент: Предохранительное ограждение рабочих механизмов грузоподъемного крана
Следующий патент: Кабина мостового крана
Случайный патент: Устройство для соединения двигатся с тормозом при испытаниях