Следящая система
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
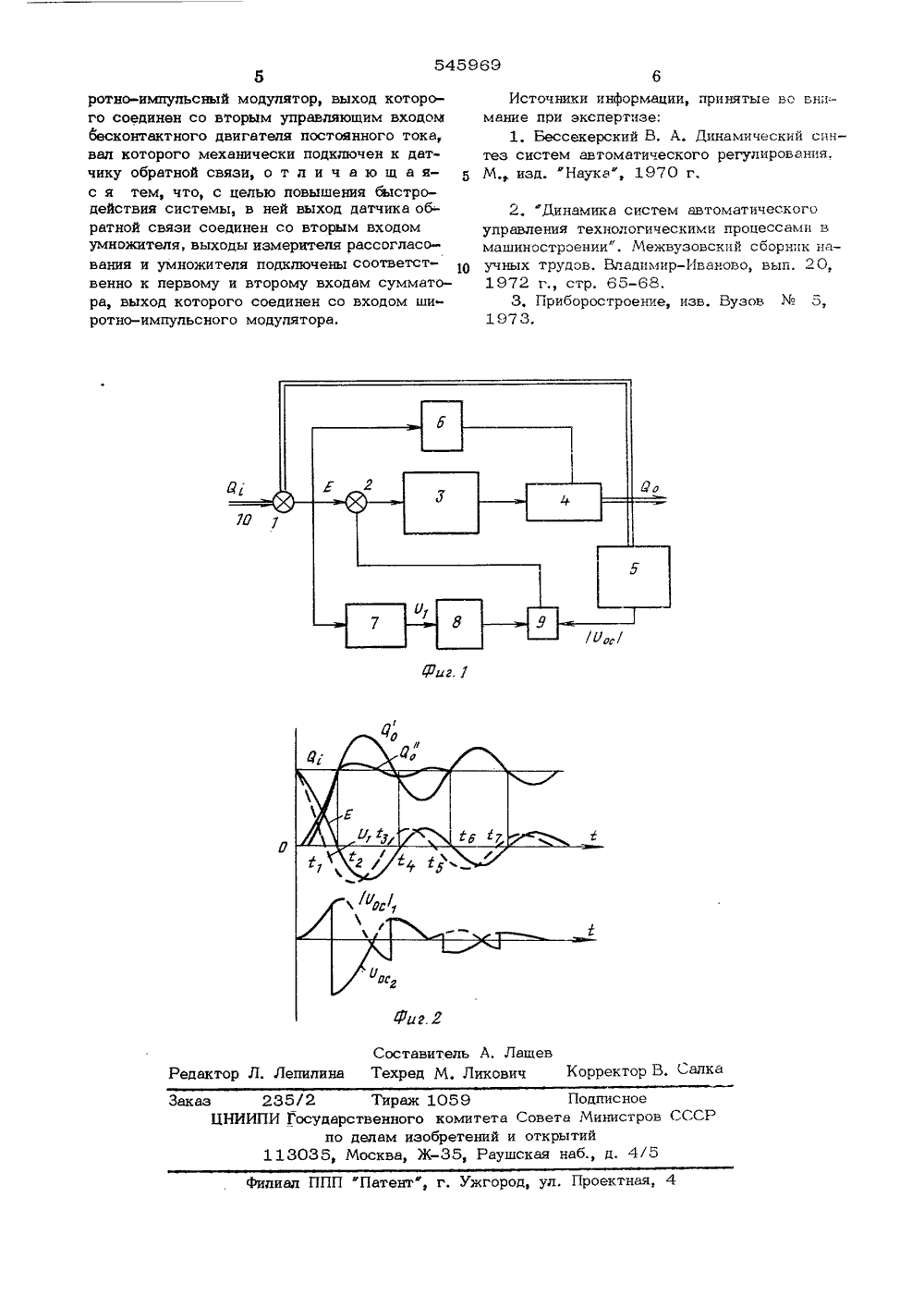
ОП ИСАНИЕИЗОБРЕТЕН ИЯ К АВТОРСКОМУ СВИДЕПЛЬСТВУ Союз Советскии Социал исти цеских Реслублик) М, К. - ,."605 В нием заявки 5 е присоед осударственный комитеСовета Министров СССРпо делам изооретемий 3) Приоритет ано 05,02.77,Опублиллетень открыт убликования описания 04 7-т ат(72) Авторы изобретеии ов и А. С. Суляев Заявитель Рязанский радиотехнический институт 54) СЛЕДЯЩАЯ СИСТЕМА Известны следящие приводы, содержащие щ реверсиввый датчик скорости, выполненный в виде асинхронного тахогенератора с демо- к дулятором и широтно-импульсным модулято- с ром, управляемый выпрямленным напряжени- о ем, которое получается путем вычитаниям сигнала реверсивной скоростной обратнойв связи из сигнала ошибки 11. Однако отмечается низкое быстродействие по сравнению со следящими приводами без обратной связи,5 иИзвестны также следящие приводы с бес- бе контактным двигателем постоянного тока и (БДПТ), содержащие амплитудный канал с широтно-импульсным модулятором и канал ,реверса, в который включается фазоопере- о н 1 жающее (дифференцирующее) корректирующее устройство 2. Отмечается, однако, слабая помехозащищенность, потому что хороший эффект коррекции достигается при большом фазовом опережении корректирующего уст- вл Изобретение относится к области автоматики, а именно к следящим электроприодам с бесконтактными двигателями постоянного тока, и может быть использован для повышения быстродействия приводов ройства. Кроме того, системы ргботоспоссб - ны только для узкого диапазона чгстот, Следует также отметить, что некоторые тинь, входного воздействия, нглрпмер синусоидгльное, системы на выходе воспроизводят с боиьими искажениями.Известна также следяшгя система " бесонтактным двигателем постоянного тока, одержашая сумматор, измеритель ргссоглгования, первый и второй входы которого еханически соединены соответственно с алом бесконтактного -двигателя постояпноо тока и задающим валом, выход из:.ер еля рассогласования через блок реверса одключен к первому управляющему входу сконтактного двигателя постоянного тока через последовательно соединенные фгзопережающее звено и блок сигнатуры - к ервому входу умножителя, широтно-импульсй модулятор, выход которого соединен со торым управляющим входом бесконтгктного игателя постоянного тока, вал которого еханически подключен к датчику обратной вязи 33. В этой системе ревеос осущестяется умножением сигнала сигнатуры нгвыходной сигнал нереверсивного. широтно-импульсного модулятора, при этом коррекциясистемы также осуществляется по каналуреверса, потому что сигнал сигнатуры формируется из разности сигнала рассогласования системы и напряжения реверсивного тахогенератора, предварительно пропущенногочерез фильтр и корректирующее устройство(дифференцирующее). Однако реализация такой коррекции встречает некоторые затруднения, поскольку в условиях, при которыхобычно работают БДПТ, щеточные тахогенераторы постоянного тока не приемлемыиз-за низкой надежности, асинхронные -вследствие больших габаритов и необходимости использования источников переменного напряжения, а применение синхронныхтахогенераторов без сложных логическихустройств невозможно, потому что их выходной сигнад нереверсивный. Следует такжеотметить, что все перечисленные скорректированные следящие приводы имеют меньшеебыстродействие по сравнению с нескорректированными.Пель изобретения - повышение быстродействия системы. Это достигается тем,что выход датчика обратной связи соединенсо вторым входом умножителя, выходы измерителя рассогласования и умножителя подключены соответственно к первому и второму входам сумматора, выход которого соединен со входом широтно-импульсного модулятора.На фиг. 1 представлена структурная схема следящей системы; на фиг, 2 - диаграм 35мы, поясняющие работу,Система содержит измеритель 1 рассогласования, сумматор 2, широтно-импульсныймодулятор 3 (ШИМ), бесконтактный двигатель 4 постоянного тока (БДПТ), датчик 5"обратной связин, блок 6 реверса, фазоопережающее звено 7, блок 8 сигнатуры, умнажитель 9, О - напряжение фазоопережающего звена, Оас - напряжение датчика обос 45ратной связи, О ос - напряжение обратной2связи, б - сигнал ошибки, 4 - входной сигнал, Яа - выходной сигнал, 10 -задающий вал,Входной сигнал поступает на один из 50 входов измерителя рассогласования 1, выход которого подключен на первый вход сумматора 2. Выход сумматора 2 через ШИМ 3 подключен на вход коммутатора БДПТ 4, управляющий величиной скорости двигателя. 55 На выходном валу двигателя укреплен датчик обратной связи 5. Выход измерителя 1, кроме того, подсоединяется на вход блока реверса 6, управляющего направлением вращения БДПТ 4, и ко входу звена 7, выход 60 которого через блок сигнатуры 8 подключен к первому входу умножителя 9, Ко второму входу умножителя 9 подсоединен выход датчика 5, а выход умножителя 9 подключен ко второму входу сумматора 2, Выходной вал двигателя соединен со вторым входом измерителя рассогласования 1,Работа следящей системы иллюстрируется диаграммами (фиг. 2) .Сдедящая система с отключенной обратной связью (напряжение обратной связи 0 ) при подаче на ее вход сигнала 3 .2воспроизводит на выходе сигнал Оо . При этом сигнал ошибки системы представлен кривой, а напряжение датчика обратной связи 5 - кривой ( Оа, ), Напряжение с выхода звена 7 - О меняет знак в моменты времени 1 , 1 , 1 , 1 и т.д. Умножая напряжение О на напряжеосние О формируем напряжение обратной связи О, На участке 0 - 1 сигналосскорости складывается с сигналом ошибки , заставдяя двигатель более интенсивно разгоняться. На участке 1 - 1получаем торможение БДПТ, поскольку напряжение обратной связи ц а вычитается из сигнаосла ошибки, В дальнеишем работа следящего привода аналогична, Подключение в контур следящего привода обратной связи, напряжение которой сформировано согласно преддоженному алгоритму, улучшает динамику сисРтемы (выходной сигнал 4 о ). Уменьшение перерегулирования в предложенной системе не сопровождается ухудшением быстродействия, Напротив, соответствующим выбором коэффициента обратной связи можно получить быстродействие лучше, чем в системе без обратной связи. Кроме того, обладая преимуществами в динамике, предложенная следящая система использует простые и надежные синхронные тахогенераторы, обладающие лучшими весогабаритными характеристиками по сравнению с асинхронными и щеточными таходатчиками постоянного тока,Формула изобретенияСледящая система, содержащая сумматор, измеритель рассогласования, первый и второй входы которого механически соединены соответственно с валом бесконтактного дви- гателя постоянного тока и задающим валом, выход измерителя рассогласования через блок реверса подключен к первому управля ющему входу бесконтактного двигателя лостоянного тока и через последовательно соединенные фазоопережающее звено и блок сигнатуры - к первому входу умножителя, ши235/2 ИПИ Государс по д 113035, М059 Подпискомитета Совета Минибретений и открытий-35, Раушская наб., д. оетров ССС енногоам изква, Ж атент, г. Ужгород, ул, Проектная,ротно-импульсный модулятор, выход которого соединен со вторым управляющим входом бесконтактного двигателя постоянного тока, вал которого механически подключен к датчику обратной связи, о т л и ч а ю щ а яс я тем, что, с целью повышения быстродействия системы, в ней выход датчика обратной связи соединен со вторым входом умножителя, выходы измерителя рассогласования и умножителя подключены соответственно к первому и второму входам сумматора, выход которого соединен со входом широтно-импульсного модулятора. Источники информации, принятые во внимание при экспертизе:1. Бессекерский В, А. Динамический синтез систем автоматического регулирования. М. изд. "Наука", 1970 г. 2. Динамика систем автоматическогоуправления технологическими процессами вмашиностроении". Межвузовский сборник на -учных трудов, Владимир-Иваново, вып. 20,1972 г стр. 65-68.3, Приборостроение, изв. Вузов5,1973,
СмотретьЗаявка
2140426, 14.04.1975
РЯЗАНСКИЙ РАДИОТЕХНИЧЕСКИЙ ИНСТИТУТ
ЗУБОВ МИХАИЛ АНТОНОВИЧ, СУЛЯЕВ АЛЕКСАНДР СЕРГЕЕВИЧ
МПК / Метки
МПК: G05B 11/28
Метки: следящая
Опубликовано: 05.02.1977
Код ссылки
<a href="https://patents.su/3-545969-sledyashhaya-sistema.html" target="_blank" rel="follow" title="База патентов СССР">Следящая система</a>
Импульсный стабилизатор постоянного напряжения

Номер патента: 481890
Опубликовано: 25.08.1975
Авторы: Гамисония, Гвелесиани, Тодрия
МПК: G05F 1/56
Метки: импульсный, постоянного, стабилизатор
...рительный орган, жения, усилитель руюшее устройств гофазный мультив ет недостаточно рования и коэфф стабилизатородержаший силояемый многофазй фильтр, измеопорного напряого тока; фазир и ждуший мноОднако он имеачества регулиабйлизаци10 выход источн постоянн о, тригге ибратор.высокие к ициент ст пос цир На чертеже дана стабилизатора. Он содержит тор 1, многофаз ходной фильтр 3 источник 5 опор 1гаемого ем сформа, вырган 4,усили- . 25 многофазный тра ный выпрямител измерительный ного напряже ни(54) ИМПУЛЬСНЫЙ СТАБИЛИЗАТОР Предлагаемый стабилизатор отличаеттем, что вход фазируюшего устройства дключен к выходу усилителя суммарноигнала, один вход которого соединен ходом усилителя постоянного тока нередственно, а другой - через...
Стабилизатор постоянного напряжения или тока

Номер патента: 619913
Опубликовано: 15.08.1978
Авторы: Михайлов, Прудников, Розенблат
МПК: G05F 1/56
Метки: постоянного, стабилизатор
...диоды - с другим выходным выводом,На чертеже дана принципиальная электр рическая схема описываемого стабилиза- тора.Управляющая цепь регулирующего трав зистора 1 стабилизатора связана с выходом (выходами) усилителя 2 сигнала рассогласования. Вход усилителя 2 по постоянному току соединен со сравнивающим блоком 3, а вход по переменному току через конденсатор 4 соединен с выходом стабилизатора и через встречно-параллельные диоды 5 и 6 с общей точкой регулирующего транзистора 1, и нагрузки 7.В исходном состоянии напряжение на . выходе стабилизатора поддерживается постоянным с погрешностью, определяемой 20 возможностью системы авторегулирования, а величина напряжения задается делителем сравнивающего блока 3. Переменная составляющая...
Преобразователь постоянного напряжения в квазисинусоидальное переменное

Номер патента: 736303
Опубликовано: 25.05.1980
Авторы: Буденный, Сенько, Смирнов, Солодовник
МПК: H02M 7/48
Метки: квазисинусоидальное, переменное, постоянного
...1720 и части преобразователя, относящейся к ним, заключается в следующем, Функции, выполняемые этими модуляторами,различны в процессе формирования выходного напряжения. Под действием сигналов программного узла 23 формирования 20импульсов управления, поступающих надругие входы вспомогательных амплитудных модуляторов, они на своих выходахизменяют фазу напряжения задающего генератора 16 на 180 О, которое и является управляющим дпя модуляторов 1-4,Временные моменты О - ;4 измененияфаз высокочастотных управляющих напряжений О - Оо не выходах модуляторов 17-20 определяются программным ЗОузлом 23 формирования импульсов управления и обусловлены законом аппроксимации синусоиды ступенчатой кривой. ВыХодные напряжения 0 - 04 снимаютсясо...
Стабилизированный преобразователь постоянного напряжения

Номер патента: 1007094
Опубликовано: 23.03.1983
Авторы: Жуйков, Коротеев, Тодоренко
МПК: G05F 1/56
Метки: постоянного, стабилизированный
...выходом соединенный с управляющим входом ключевого регулятора, а входомс выходом цепи обратной связи, состоящей из датчика напряжения,входом подключенного к выходным выводам стабилизированного преобразователя напряжения источника опорного напряжения и коммутатора, соединенного первым входом с выходом датчика тока, снабжен введенным в цепьобратной связи сумматором, соединенным входами с выходами указанных источника опорного напряжения,датчика выходного напряжения и коммутатора, а выходом -с указаннымвыходом цепи обратной связи, причемвведенный второй вход указанногокоммутатора соединен с выходом ука-.занного датчика напряжения.На чертеже представлена блок-схе. ма стабилизированного преобразователя напряжения.К нагрузке 1 подключен...
Устройство преобразования размаха сигнала цветовой поднесущей в постоянное напряжение

Номер патента: 1019671
Опубликовано: 23.05.1983
Авторы: Басий, Матвеев, Сташкив
МПК: H04N 7/02
Метки: напряжение, поднесущей, постоянное, преобразования, размаха, сигнала, цветовой
...входу компарато- Формирует соответственно положительра, при Этом вход .второго счетного ные и отрицательные импульсы ( фиг. триггера подключен к выходу первого 55 2 ж) с длительностью 10-15 нс, косчетного триггера, торые поступают на второй вход сумНа Фиг. 1 представлена Функцио- матора 11, Амплитуда выходных имнальная схема устройства преобразо- пульсов второго формирователя 9 вания размаха сигнала цветовой под-: должна регулироваться с высокой несущей в постоянное напряжение; на 60 точностью.фиг. 2 - диаграммы напряжений, псяс- В сумматоре 11 происходит сложеняющие работу устройства. ние входного синусоидального сигнаУстройство преобразования размаха ла цветовой поднесущей с раэнополярсигнала цветовой поднесущей в пос- ными вйходными...
Предыдущий патент: Устройство для измерения периода
Следующий патент: Устройство для пропорционального регулирования
Случайный патент: Регулируемый гидропривод