Способ определения параметров движущегося объекта
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 479139
Автор: Панов



Текст
Союз Советских Социалистических Республикооударствеиннй комитетСовета 1 лиииотров СССРоо делам изооретенийи открытий 3) УДК 621.398(088.8) ния 15.09,7 ата опубликования оп(71) Заявитель А. П. Панов Ордена Ленина институт кибернетики АН Украинской СС(54) СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРИЕНТАЦИ ДВИЖУЩЕГОСЯ ОБЪЕКТА ходных 1Изобретение относится к технике определения параметров ориентации движущихся объектов в пространстве и может использоваться при разработке аппаратуры бортовых систем ориентации, навигации и управления 5 движущимися объектами с применением бортовых цифровых вычислительных машин (БЦВМ),Известен способ определения параметров ориентации в трехмерном пространстве, за ключающийся в том, что задают временной интервал, в течение которого подсчитывают число импульсов каждого датчика; количество импульсов, подсчитанное за данный отрезок времени, характеризует пройденный путь по 15 каждой оси.Однако при таком способе определения пути погрешность квантования может достигать значительной величины.Цель изобретения - повышение точности 20 определения параметров ориентации.Это достигается тем, что по предлагаемому способу измеряют временные интервалы между импульсами каждого датчика, определяют соотношения временных интервалов, находят 25 датчик, у которого частота следования импульсов наибольшая и при появлении очередного импульса на выходе этого датчика определяют амплитуды сигналов других датчиков по формулеЗО О=Л -(1)Егде Л - амплитуда квантования вьсигналов датчиков;т, - последний измеренный временной интервал между импульсами датчика,частота которого наибольшая;т; - последний измеренный временнойинтервал между импульсами датчика, амплитуду которого вычисляют, и в зависимости от полученныхамплитуд определяют величину параметров ориентации движущегося,объекта.На чертеже в качестве примера на временных осях х, у, г условно нанесены в видепрямоугольников квантованные по постоянному уровню сигналы - импульсы трех датчиков Х, У, 2, имеющих взаимно ортогональныеоси чувствительности. Полярность импульсовдатчиков Х и Е - положительная, а датчика1 - отрицательная. Начало осей х, у, г соответствует начальному моменту времени работы датчиков /=О,Определение амплитуды по времени сигналов импульсных интегрирующих датчиков угловой скорости по предлагаемому способуможно осуществлять с любой их трех частотследовация импульсов датчиков.Например, для определения амплитуды с3частотой, равной частоте следования импульсов датчика, измеряют временные интервалы ть тг, т, следования первых импульсов и вычисляют сигналы Ох,з и О (,з, которые отсутствуют на выходах датчиков Х и У в момент времени 1=тз, соответствующий моменту появления первого импульса на выходе датчика 2, по формулам тз2т Ох,з =Л О, з= - Л (2)Тггде Л - постоянный уровень квантования сигналов.В момент времени 1=тз+тб, соответствующий моменту времени появления второго импульса на выходе датчика Г, сигналы датчиков Х и У после измерения интервалов т 4, тб, тб вычисляют по формулам ТбОх,б =ЛТ 4 ТбЙу,б= - ЛТ 5(3) и так далее.Сигналы, которые должны были бы появиться в результате интегрирования проекций вектора угловой скорости и за время тз на выходах датчиков Х, У и Г, можно с помощью ряда Тейлора представить в виде+ (ТЗ Т 2) (6) Проекции вектора угловой скорости и,и ГдЕ Их,З И Иу,З - ПрОЕКцИИ ВЕКтсра уГЛОвой скорости на оси чувствительности датчиков Х и У, соответствующие моменту времени=тз,О)х,З И Иу З - ПЕРВЫЕ ПрОИЗВОдНЫЕ ПО ВрЕмени от проекций вектора угловой скорости,соответствующие также моменту времени=тз;0(тз ) - порядок погрешности представления сигналов датчиков в виде (4);Л - уровень квантования сигналов.ПрОЕКцИЮ Их,З ВЕКтОра уГЛОВОй СКОрОСтИ Вмомент времени 1=тз можно выразить черезпроекцию вектора угловой скорости в моментвремени 1=т 1 с помощью ряда Тейлора в видеИ х,б - И л, О) х, (ТЗ Т 1) + О) х. (ТЗ Т 1) +=0 но найти из вырас помощью ряда2+0( ) (7)2 и представить в видеи-- и+0(т). (8)т, 2Ь Тг2О)у,2= = и 2 + 0(т 2 )ТгИз (4), (5), (6) и (8) следует формулы (2).Погрешности формул (2), определяющиеточность предлагаемого способа определения параметров, оцениваются выражениями60 х,З =О)х, ТЗ(ТЗ - Т 1) - О) х,1(ТЗ - Т) +1г 2+0(тз); (9)Выражения (9) показывают, что при уровне квантования Л, имеющем такой же порядок 30 малости, как и временные интервалы следования импульсов, т, е. Л=О(т), абсолютные погрешности получаемых синхронных сигналов имеют порядок малости, равный 0(Л), а относительные погрешности - порядок малости, 35 равный 0(Л).Например, при уровне квантования Л=2 в "относительные погрешности квантованных по времени сигналов имеют величину порядка 0,01%, что уже соответствует точности лучших 40 современных датчиков угловой скорости.Точность предлагаемого способа будет наибольшей, если отношения временных интервалов в формуле (1) меньше единицы;Предлагаемый способ позволяет не только 45 повысить точность квантованных по временисигналов при заданном уровне квантования импульсных сигналов, но и увеличить уровень квантования импульсных сигналов датчиков при заданной точности квантования по 50 времени, т. е. снизить требования к уровнямквантования выходных сигналов импульсных датчиков угловой скорости, что, в свою очередь, позволяет уменьшить объем вычислений в БЦВМ, необходимых для определения пара-.55 метров ориентации.Для вычисления параметров ориентации сиспользованием квантованных по времени сигналов по предлагаемому способу могут быть применены вычислительные методы бо лее точные, чем методы первого порядка, нс.пользуемые при вычислении параметров ориентации с максимальной частотой следования импульсов. При этом вычисления параметров ориентации по сигналам, получаемым по пред лагаемому способу, должны осуществляться с478139 О=Ате 5 где Л -т гиии 1 а 15 тавитель С. СорвирТекрсд М. Семенов йзермаи оррек раулова Редактор Заказ 310 ПодписноеСС 1 Изд. И Государст по де Москва6 Тираж 69оиета Мииистрооткрггпйаб., д, 4/5 И енного комитета С ам изобретений иЖ, Раушскаи ОТ, Загорский цек переменным шагом, равным времеш 1 ым интервалам следования импульсов. Предмет изобретения Способ определения параметров ориентации движущегося объекта, основанный на регистрации сигналов от импульсных интегрирующих датчиков, жестко связанных с объектом, отличающийся тем, что, с целью повышения точности определения параметров ориентации, измеряют временные интервалы между импульсами каждого датчика, определяют соотношения временных интервалов, находят датчик, у которого частота следования импульсов наибольшая, и при появлении очередного импульса на выходе этого датчика определяют амплитуды сш палов других датчиков по формуле амплитуда квантования выходных сигналов дагчиков;последний измеренный временной интервал между импульсами датчика, частота которого наибольшая; последний измеренный временной интервал между импульсами датчика, амплитуду которого вычисляют, и в зависимости от полученных амплитуд определяют величину параметров ориентации движущегося объекта,
СмотретьЗаявка
1921710, 17.04.1973
ОРДЕНА ЛЕНИНА ИНСТИТУТ КИБЕРНЕТИКИ АН УКР. ССР
ПАНОВ АНАТОЛИЙ ПАВЛОВИЧ
МПК / Метки
МПК: G08C 15/06
Метки: движущегося, объекта, параметров
Опубликовано: 30.07.1975
Код ссылки
<a href="https://patents.su/3-479139-sposob-opredeleniya-parametrov-dvizhushhegosya-obekta.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения параметров движущегося объекта</a>
Амплитудно-временной регенератор сигналов
Номер патента: 372727
Опубликовано: 01.01.1973
Автор: Гейшис
МПК: H03K 3/12, H04L 25/66
Метки: амплитудно-временной, регенератор, сигналов
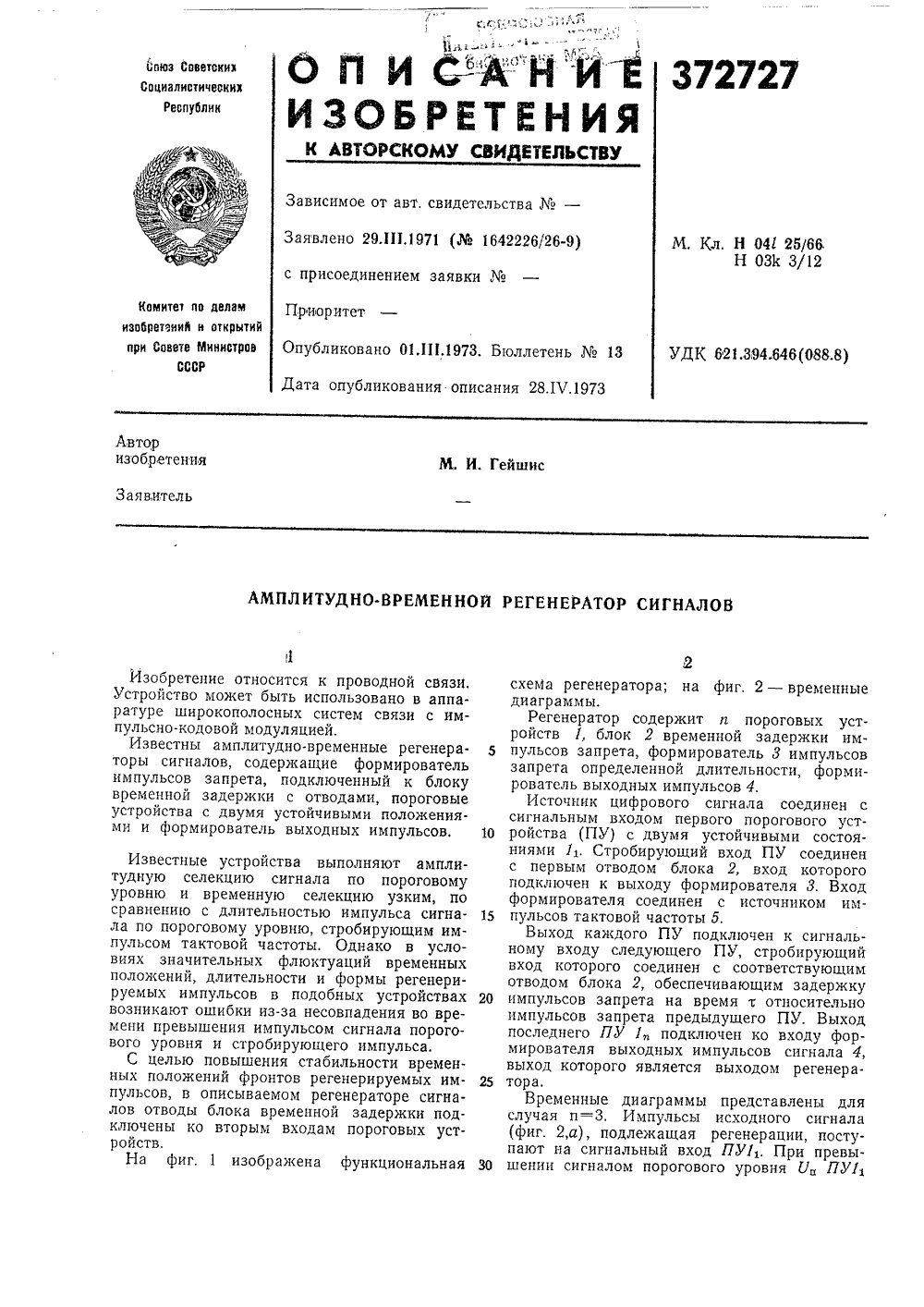
...этом на сигнальный вход ПУ 1, При отсутствии импульса запрета на стробирующем входе ПУ 1, (фиг. 2,в) или по окончании его действия ПУ 1 переключается из исходного состояния О в состояние 1 (фиг. 2,д), и перепад сигнала с выхода ПУ 1, подается на сигнальный вход ПУ 1,. Аналогично процесс последовательного переключения проходит во всех остальных ПУ, В исходное состояние ПУ возвращаются передними фронтами соответствующих импульсов запрета (фиг. 2,б, г, е).Этот процесс происходит последовательно от ПУ 1 к ПУ 1 п в соответствии с временными сдвигами в цепи распределения импульсов запрета.После прохождения импульса сигнала через ПУ 1, передний фронт соответствующего импульса запрета фиксирует величину и временное положение заднего фронта...
Импульсный датчик угловой скорости

Номер патента: 206197
Опубликовано: 01.01.1967
Авторы: Лаби, Научно, Нахкур, Трейкельдер, Уммер, Якобсон
МПК: G01P 3/487
Метки: датчик, импульсный, скорости, угловой
...угловой скорости отличается от известны.; тем, что, с целью устранения ложных выходных импульсов при крутильных колебаниях и вибрации вала, он снабжен дополнительно вторым чувствительным элементом, установленным под определенным углом к первому и подключенным к соответствующему входу триггера,На чертеже представлена схема описывасмого устройства. Импульсный датчик угловой скорости содержит зубчатый диск 1, укрепленный на вращающемся валу, два чувствительных элемента 2, выполненных в виде катушек с постоянными магнитами, триггер 3. Чувствительные элементы 2 установлены под опредсленным углом ср к окружности и подключены к соответствующим входам триггера 3,При вращении вала зуб диска проходитсначала мимо одного чувствительного...
Преобразователь параметров емкостных датчиков во временной интервал и напряжение
Номер патента: 1525619
Опубликовано: 30.11.1989
МПК: G01R 27/26
Метки: временной, датчиков, емкостных, интервал, напряжение, параметров
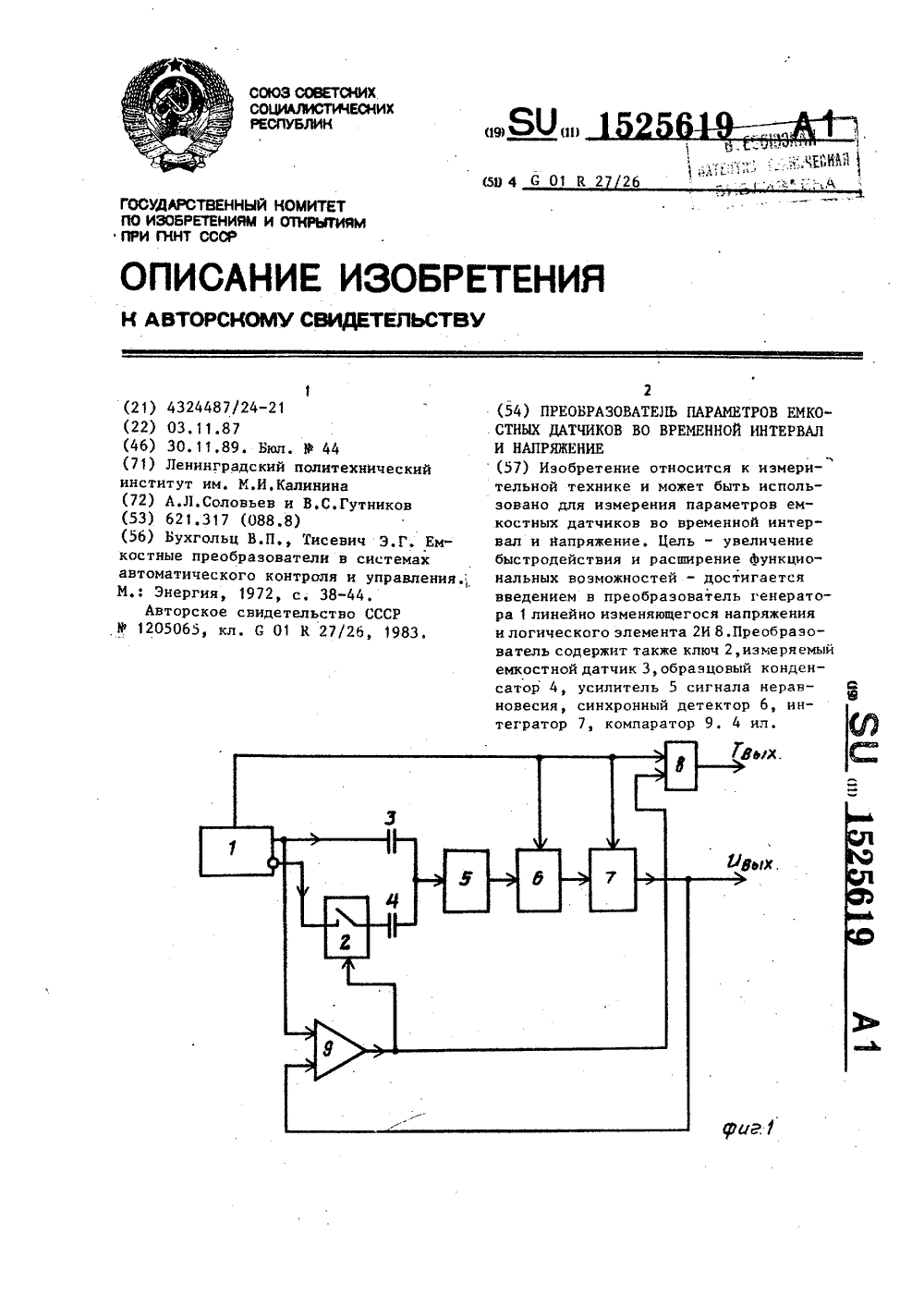
...раэмыкания ключа 2 ток через образцовый конденсатор 3 не протекает. Поэтому на вход усилителя 5 (в момент размыкания ключа 2;: подается ток, протекающий только через измеряемый конденсатор 3, При уменьшении линейно изменяющегося напряжения на прямом выходе ГЛИН 1 меньше порога срабатывания компаратора 9 вновь замыкается ключ 2, и на вход усилителя 5 подается ток, протекающий через измеряемый 3 и образцовый 4 конденсаторы. Выходное напряжение усилителя 5 показано на Фиг. 3.6, Для нормальной работы преобразователя должно выполняться условие5 152561Ск(о, тк. Тоько тБ (П где Ск - емкость измеряемого кондея"сатора 3; 5С- емкость, образцового конденсатора 4;Тцк " выходной временной интервал;Т - половина периода выходногосигнала ГЛИН 1;...
Измерительный преобразователь параметров емкостного датчика во временной интервал

Номер патента: 1798734
Опубликовано: 28.02.1993
Авторы: Андреев, Гутников, Логинов, Соловьев, Тимошенко
МПК: G01R 27/26
Метки: временной, датчика, емкостного, измерительный, интервал, параметров
...В качестве устройства формирования цикла работы преобразователя применен счетчик . Джонсона и дешифратор 26, преобразующий двоичный код в сигнал на одном из десяти выходов. На тактовый вход счетчика с дешифрованными выходами 26 подает-.ся напряжение прямоугольной формы от генератора 25, Форма выходного напряжения генератора 25 приведена на фиг.2,1. Частота работы генератора 25 должна быть стабилизирована кварцевым резонатором.Напряжение управления работой ключа 11 (фиг, 2.2) снимается с выхода 08 счетчика 26, который является первым выходом БУ 27, С выхода "перенос" счетчика 26 снимается сигнал (фиг.2.3), который управляет работой коммутатора 2 и задает цикл работы преобразователя, При работе ключей 2 и 3 на образцовом 4 и измеряемом...
Преобразователь параметров индуктивного датчика

Номер патента: 1677658
Опубликовано: 15.09.1991
Авторы: Когельман, Мартяшин, Онищенко, Сенаторов, Фролов, Чернецов
МПК: G01R 27/00
Метки: датчика, индуктивного, параметров
...с разными весовыми коэффициентами. На выходе сумматора 20 35 020 = 2016 - 017 + 02. 23) 40 Ойг(19) Напряжение на выходе усилителя 13 после окончания переходного процесса в момент времени 1 12 Оз =Оз - (С - ) В момент времени сз в блоке 16 выборки- хранения происходит фиксация напряжения по сигналу, приходящему с одновибратора 14, который срабатывает по переднему фронту сигнала с генератора 1 прямоугольных импульсов, Напряжение в блоке 16 выборки-хранения определяется выражением О 1 з = О 1 з (зз).= Оз - (С -- ) . (17) В момент времени 14 по заднему фронту . импульса с генератора 1 прямоугольных импульсов срабатывает первый триггер 3.В результате через переключатели 4 и 6 на вход интегратора 8 поступает напряжение -00, сигнал на выходе...
Предыдущий патент: Устройство для асинхронного уплотнения каналов связи с использованием временного разделения сигналов
Следующий патент: Преобразователь угол-код-фаза импульсов
Случайный патент: Устройство для скрутки жил провода