Система дистанционного автоматического управления установкой из нескольких силовыхагрегатов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 453677
Авторы: Изобретени, Кондратенко, Мушанов, Сиротин

Текст
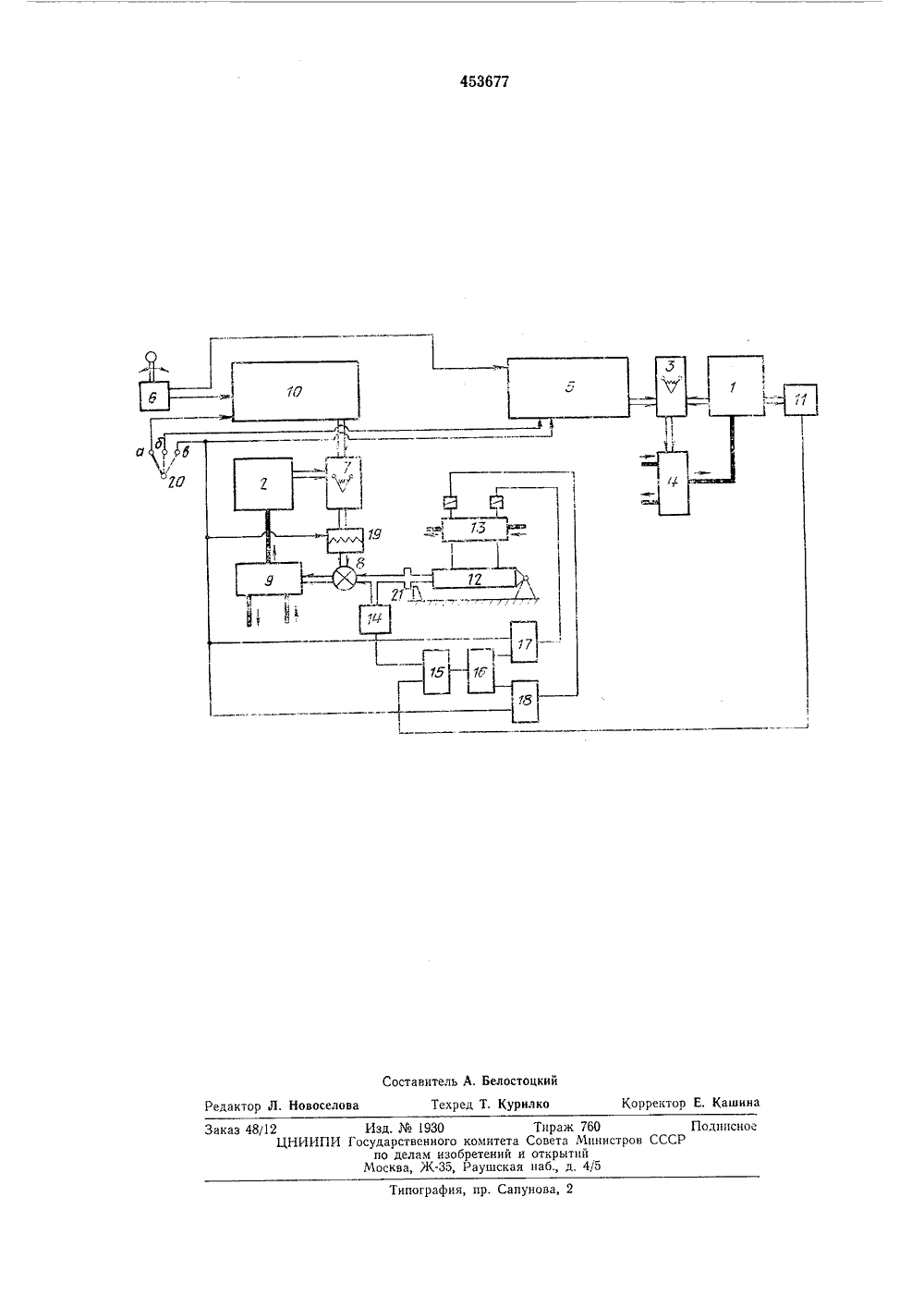
ИСАЙ ИЕ 145 О ЛИЗОБРЕТЕНИЯ 3677 Союз Советских Социалистических РеспубликГасударственный комитет Совета Министров СССР по делам изооретений и открытий(54) СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЧЕСКОГОПРАВЛЕНИЯ УСТАНОВКОЙ ИЗ НЕСКОЛЬКИХ СИЛОВЫХАГРЕГАТОВ Изобретение относится к озации силовых установок.Известны системы дистанционного автоматического управления установкой из нескольких силовых агрегатов, кинематически связанных с общим выходным валом, содержащие регуляторы режимов каждого агрегата, соединенные выходными звеньями с дозирующими органами топливоподачи и снабженные управляющими блоками каждого агрегата, взаимодействующими с переключателем режима работы.Однако в известных системах загрузка каждого из агрегатов не контролируется, что приводит к перегрузкам одних и недогрузкам других агрегатов.С целью равномерной загрузки силовых агрегатов в предлагаемой системе регулятор одного из них (ведомого) соединен с дозирующим органом при помощи переключающего механизма, а другой (ведущий) агрегат снабжен датчиком режима, управляющим переключающим механизмом, Переключающий механизм выполнен в виде дифференциального звена, взаимодействующего с установленным на выходном звене регулятора ведомого агрегата тормозом и с сервомеханизмом, снабженным фиксатором.Сервомеханизм снабжен упором минимальной подачи топлива. Датчик режима выполнен в виде измерителя угловой скорости ведущего агрегата.На чертеже схематически представлен одиниз вариантов выполнения предлагаемой систе 5 мы,Ведущий силовой агрегат 1 и ведомый силовой агрегат 2 кинематически связаны с общим выходным валом (не показан) . Агрегат 1 кинематически связан с регулятором 3 ре.10 жима, который кинематически подключен кдозирующему органу 4 топливоподачи. Регулятор 3 режима связан командным каналом с управляющим блоком 5, подключенным к задающему командному органу б.15 Ведомый силовой агрегат 2 кинематическисвязан с регулятором 7 режимов, который кинематически подключен при помощи дифференциального звена 8 к дозирующему органу 9 топливоподачи, Регулятор 7 связан команд ным каналом с управляющим блоком 10, также подключенным к задающему командному органу б.Для совместной работы ведомого и ведущего агрегатов последнии снабжен датчиком 25 11 режима.Для управления дозирующим органом 9при совместной работе агрегатов к дифференциальному звену 8 кинематически подключен сервомеханизм 12, гидравлически связанный 30 с электрогидравлическим преобразователем13 и кинематическн - с датчиком 14 обратной связи, Выход датчиков 14 и 11 подключен ко входу сумматора 15, выход которого через фазочувствительный элемент 16 и логические элементы И 17 и 18 подключен к обмоткам преобразователя 13.Для обеспечения поочередного подключения регулятора 7 и сервомеханизма 12 через дифференциал.; но звено 8 к дозиру;ощему органу 9 выходное звено регулятора 7 снабжено управляемым тормозом 19, а сервомеханизм 12 снабжен внутренним фиксатором, фиксирующим положение его выходного органа при отсутствии управляющего сигнала,Для выбора режима работы система снабжена трехнозиционным переключателем 20, подключенным к управляющим блокам 5 н 10, тормозу 19 и входам элементов И 17 и 18. Сервомехапизм снабжен упором 21 минимальной подачи топлива.Система работает следующим образом.Для обеспечения совместной работы ведущего и ведомого агрегатов с равномерной загрузкой необходимо вывести из работы регулятор 7 ведомого агрегата и осуществить управление дозирующим органом 9 топливоподачи от ведущего агрегата 1. Для этого переключатель 20 устанавливается в положение в. При этом снимается управляющий сигнал с блока 10, выходное звено регулятора 7 затормаживается тормозом 19, что создает условия для управления дозирующим органом 9 от сервомеханизма 12. Управляющий сигнал на управлепие органом 9 формируется на входе сумматора 15 как разность сигналов от датчика 14 обратной связи и датчика 11 режима ведущего двигателя. При наличии сигнала рассогласования на выходе сумматора 15 этот сигнал преобразуется фазочувствительным элементом 1 б (в зависимости от полярности сигнала) в управляющие сигналы, поступающие на входы элемента И 17 (18). При наличии на входах элемента И 17 (18) сигналов от переключателя 20 режимов на выходе элемента И 17 (18) появляется управляющий сигнал, поступающий на соответствующую обмотку преобразователя 13. Последний подает рабочую жидкость в соответствующую полость сервомеханизма 12, изменяющего подачу топлива в агрегат 2. При вы равнивании сигналов на входе сумматора 15управляющие сигналы на преобразователь 13 снимаются, сервомеханизм становится на внутренний фиксатор.Для предотвращения остановки ведомого 10 агрегата 2 в случае резкого изменения режимов ведущего агрегата 1 сервомеханизм 12 снабжен упором 21 минимальной подачи топлива, обеспечивающим устойчивую работу ведомого агрегата 2.15П р ед м ет изобретения1. Система дистанционного автоматического управления установкой из нескольких си ловых агрегатов, кинематически связанных собщим выходным валом, содержащая регуляторы режимов каждого агрегата, соединенные выходными звеньями с дозирующими органами топливоподачи и снабженные управ ляющими блоками каждого агрегата, взаимодействующими с переключателем режима работы, о т л и ч а ю щ а я с я тем, что, с целью равномерной загрузки силовых агрегатов, регулятор одного из них (ведомого) соединен с 30 дозирующим органом при помощи переключающего механизма, а другой (ведущий) агрегат снабжен датчиком режима, управляющим переключающим механизмом.2. Система по п. 1, отличающаяся 35 тем, что переключающий механизм выполненв виде дифференциального звена, взаимодействующего с установленным на выходном звене регулятора ведомого агрегата тормозом и с сервомеханизмом, снабженным фиксатором.40 3, Система по пп. 1 и 2, отличающаяся тем, что сервомеханизм снабжен упором минимальной подачи топлива.4. Система по пп. 1 и 3, отл и ч а ю ща яс я тем, что датчик режима выполнен в виде 45 измерителя угловой скорости ведущего агрегата.Заказ 48/12ЦНИИП Подписноев СССР ипография, пр. Сапуно Изд.1930осударственного комитета по делам изобретений Москва, Ж-З 5, Раушска Тираж 760Совета Минисоткрытийнаб., д, 4/э
СмотретьЗаявка
1642404, 01.04.1971
изобретени М. Г. Шперлинг, Г. Сиротин, А. В. Мушанов, М. Д. Кондратенко
МПК / Метки
МПК: F02D 25/00, G05D 13/34
Метки: дистанционного, нескольких, силовыхагрегатов, установкой
Опубликовано: 15.12.1974
Код ссылки
<a href="https://patents.su/3-453677-sistema-distancionnogo-avtomaticheskogo-upravleniya-ustanovkojj-iz-neskolkikh-silovykhagregatov.html" target="_blank" rel="follow" title="База патентов СССР">Система дистанционного автоматического управления установкой из нескольких силовыхагрегатов</a>
Устройство для контроля и корректировки режима рабочего движения машинно-тракторного агрегата

Номер патента: 1604640
Опубликовано: 07.11.1990
Авторы: Бубнов, Малорацкий, Орлов
МПК: B60K 41/00
Метки: агрегата, движения, корректировки, машинно-тракторного, рабочего, режима
...установки максимальной подачи топлива информирует об этом тракториста-машиниста и включает в действие логический преобразователь 6 контрольной информации и блок 7 средств директивной сигнализации,Датчик 11 положения в регуляторе топливного насоса двигателя подает сигнал через блок 12 преобразования, выполняющий оценку полноты загрузки двигателя, на указатель-сигнализатор 13 блока 5 средств контрольной сигнализации и на логический преобразователь 6 контрольной информации. Указатель-сигнализатор 13 информирует тракториста-машиниста о том, что загрузка двигателя в норме, ниже (недогрузка) или выше нормы (перегрузка),Датчик 14 теоретической скорости трактора, определяющий скорость, например по частоте вращения вала ведущего заднего моста...
Бесконтактный электромашинный агрегат

Номер патента: 311362
Опубликовано: 01.01.1971
Автор: Красношапка
МПК: H02K 51/00, H02P 9/42
Метки: агрегат, бесконтактный, электромашинный
...отноаителвно ведомого ротора,в направлении вращения ведущего и ведомого роторов со скоростью; Скорость вращения поля трехфазных токов в пространстве равна скорости вращения индуктора,П пс.г +П 2=И 1 (3) Вращающиеся трехфазные обмотки генератора и преобразователя соединяются так, чтобы направленне вращения маннитного поля в асинхронном преобразователе относительно обмотки генератора совпадало с направлением вращвния ведомого ротора агрегата.Скорости вращения магнитного поля в ааинхронном преобразователе относительно ведомого ротора агрегата и относительно статора определяют по формулам: Рс.г, Рс.гип, =и., ип, ==п 1-и,. (5)Ра.п Ра.п Частота э. д. с., наводимых в статорнойобмотке асинхронного преобразователя 2,равна:Ра.п Ип п 1 Рс.г - 1-...
Агрегат с канатной тягой для сельскохозяйственных и мелиоративных работ

Номер патента: 1091864
Опубликовано: 15.05.1984
Автор: Урбутис
МПК: A01B 3/68
Метки: агрегат, канатной, мелиоративных, работ, сельскохозяйственных, тягой
...технологической тележки в конце гона, вид сверху; на фиг. 2 - разрез А-А на фиг. 3; на фиг. 3 - технологическая тележка со сцепным устройством, вид сверху; на фиг. 4 - узел 1 на фиг. 2; на фиг. 5 - узел 1 на фиг. 3.Агрегат с канатной тягой для сельскохозяйственных работ состоит из двух базовых энергетических средств 1, расположенных с противоположных сторон относительно технологической тележки 2. Энергетические средства 1 содержат лебедки 3 с тяговыми канатами 4 и направляющими роликами 5 и соединены с тележкой 2 посредством сцепного устройства 6, выполненного в виде соединенных между собой по форме равнобедренного треугольника брусьев, два из которых соединены посредством шарниров 7 с тяговыми канатами 4. Сцепное устройство 6...
Карусельный агрегат для сушки окрашенных изделий

Номер патента: 515009
Опубликовано: 25.05.1976
Автор: Солодовниченко
МПК: F26B 15/04
Метки: агрегат, карусельный, окрашенных, сушки
...сушки окрашенных изделий содержит тенлоизолированный кожух 1, мно.гопозиционный ротор 2 с теплоизолируннцими;пере.городками 3, стояком 4 и приводом 5 тележки 6,механизм 7, лреднаэначенный для загрузки и вы.груэки тележек б, с приводом 8, неподвижный тамбур 9, тепловентиляционное оборудование 10, уплотнители 11 и 12 (см. фиг, 2), катки3, Ротор 2 ааб.жен горизонтальной платформой 14, на которой ус.тановлены направляющие 15 для тележек б. Тепло.золирующие перегородки 3 образуют секторные камеры 16 - 19, последняя из которых является зонойзагрузкивыгрузки изделий.Агрегат работает следующим образом,Тележку б с изделиями прн помощи механизма 7для загрузки и выгрузки, работающего от привода8, закатывают в секторную камеру 19, устанавливаютна...
Агрегат с канатной тягой для сельскохозяйственных и мелиоративных работ

Номер патента: 1322993
Опубликовано: 15.07.1987
Автор: Урбутис
МПК: A01B 3/68
Метки: агрегат, канатной, мелиоративных, работ, сельскохозяйственных, тягой
...управления поворотом энергетического средства 1 и 2.Механизм управления муфтой 35 сцепления энергетических средств 1 и 2 выполнен в виде установленного в направляющих 58 и 59 ползуна 60, один конец которого шарнирно соединен со штоком гидроцилнндра 61 включения муфты 35 сцепления, а другим концом посредством жестко закрепленного на нем толкателя 62 - с гидроцилиндром 63 выключения муфты 35 сцепления.13229 3Шток гидроцнлицдра 63 подпружицецпружиной 64 относительно толкателя62. Ползуц 60 поводкам 65 шарнирносоединен с рукояткой 66 включениявыключения муфты 35 сцепления. Тац 5катель 62 установлен с возможностьювзаимодействия с концевым выключателем 67, который посредством электрической цепи связан с электромагнитом 68 и концевым...
Предыдущий патент: Устройство для управления весовым., « «iinnsi tlti sejfcksf гпорционным автоматическим дозатором 1 wufta ойу
Следующий патент: Привод поворотного устройства
Случайный патент: Устройство для монтажа вертикальной опоры, поддерживаемой тросами