Система автоматического контроля параметров оператора в контуре управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 453674
Автор: Вершинин

Текст
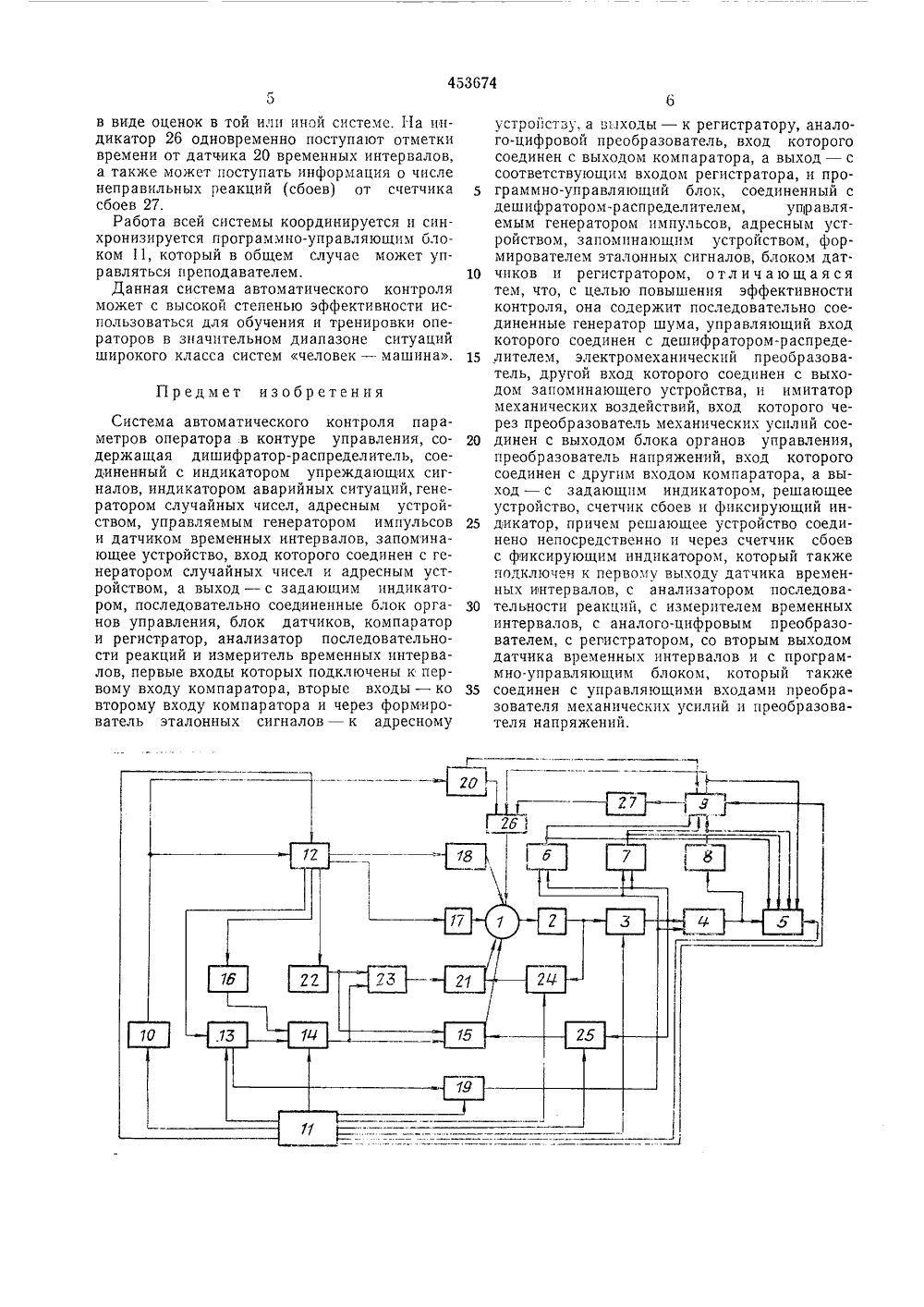
Союз Советских Социалистических Республик(51) Ч Кп Ь 05 Ь 2300 Государственный комитет Совета Министров СССР по делам изобретенийи открытий(72) Автор изобретения В, В. Вершинин осковский опытный механический завод(54) СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПАРАМЕТРОВ ОПЕРАТОРА В КОНТУРЕ УПРАВЛЕНИЯИзобретение относится к области автоматики и вычислительной техники и может найти применение при отборе, тренировке и контроле характеристик операторов . в контуре управления комплектов человек - машина, например водителей автотранспорта.Известна система автоматического контроля параметров оператора в контуре управления, содержащая дешифратор-распределитель, соединенный с индикатором упреждающих сигналов, индикатором аварийных ситуаций, генератором случайных чисел, адресным устройством, управляемым генератором импульсов и датчиком временных интервалов, запоминающее устройство, вход которого соединен с генератором случайных чисел и адресным устройством, а выход - с задающим индикатором, последовательно соединенные блок органов управления, блок датчиков, компаратор и регистратор, анализатор последовательности реакций и измеритель временных интервалов, первые входы которых подключены к первому входу компаратора, вторые входы - ко второму его входу и через формирователь эталонных сигналов - к адресному устройству, а выходы - к регистратору, аналогоцифровой преобразователь, вход которого соединен с выходом компаратора, а выход - с соответствующим входом регистратора, и программно-управляющий блок, соединенный с дешифратором-распределителем, управляемым генератором импульсов, адресным устройством, запоминающим устройством, формирователем эталонных сигналов, блоком датчиков и регистратором.Система, выполненная согласно изобретению, отличается от известной тем, что содержит последовательно соединенные генератор шума, управляющий вход которого соединен с дешифратором-распределителем, электромеханический преобразователь, другой вход которого соединен с выходом запоминающего устройства, и имитатор механических воздействий, вход которого через преобразователь механических усилий соединен с выходом блока органов управления, преобразователь напряжений, вход которого соединен с другим входом компаратора, а выход - с задающим индикатором, решающее устройство, счетчик сбоев и фиксирующий индикатор, причем решающее устройство соединено непосредственно и через счетчик сбоев с фиксирующим индикатором, который также подключен к первому выходу датчика временных интервалов, с анализатором последовательности реакций, с измерителем временных интервалов, с аналого-цифровым преобразователем, с регистратором, со вторым выходом датчика временных интервалов и программно-управляющим блоком, который также соединен с управляющими входами преобразователя механических усилий и преобразователя напряжений,Это позволяет повысить эффективность контроля и достоверность получаемых данных.Блок-схема системы автоматического контроля оператора представлена на чертеже, где;1 - оператор; 2 - блок органов управления; 3 - блок датчиков; 4 - компаратор; 5 - регистратор; б - анализатор последовательности реакций; 7 - измеритель временных интервалов; 8 - аналого-цифровой преобразователь; 9 - решающее устройство; 10 - управляемый генератор импульсов; 11 - программно-управляющий блок; 12 - дешифратор-распределитель; 13 - адресное устройство;14 - запоминающее устройство; 15 - задающий индикатор; 16 - генератор случайных чисел; 17 - индикатор аварийных ситуаций;18 - индикатор упреждающих сигналов; 19 - формирователь эталонных сигналов; 20 - датчик временных интервалов; 21 - имитатор механических воздействий; 22 - генератор шума; 23 - электромеханический преобразователь; 24 - преобразователь механических усилий; 25 - преобразователь напряжений; 26 - фиксирующий индикатор; 27 - счетчик сбоев.Система автоматического контроля работает следующим образом.Оператор 1, характеристики которого определяются и контролируются, получает команды для исполнения от задающего индикатора 15 и специальную информацию о ситуации от индикаторов 17, 26, 18, имитатора 21 и затем осуществляет необходимые манипуляции с соответствующими органами управления блока 3. Результат этих действий после преобразования в блоке 3 датчиков в напряжение поступает на компаратор 4, анализатор б последовательности реакций оператора 1 и измеритель 7 временных интервалов, в которых сравнивается с эталонным сигналом, соответствующим идеальной (или оптимальной) реакции оператора для данной ситуации, поступающим с формирователя 19 эталонных сигналов. Результат сравнения фиксируется регистратором 5 и, кроме того, подается в решающее устройство 9, Сигнал с выхода компаратора 4 предварительно преобразуют в цифровую форму с помощью аналого-цифрового преобразователя (АЦП) 8.Частота подачи команд оператору задается управляемым генератором импульсов 10, а определяется программно-управляющим блоком 11. Выбор режима работы осуществляет дешифратор-распределитель 12,Набор всех возможных команд хранится в запоминающем устройстве (ЗУ) 14, а предьявляются они оператору 1 с помощью задающего индикатора 15.1(оманды оператору 1 могут подаваться в виде типовых тестовых наборов, что соответствует большинству реальных ситуаций, когда оператор должен реагировать на целый ряд взаимно связанных типичных возмущений 5 10 15 20 25 30 35 40 45 50 55 60 65(команд). В этом случае сигналы на выборку команд из ЗУ 14 поступают из адресного устройства 13.В другом режиме оператору 1 подается последовательность команд, никак не связанных между собой, т. е. моделируется работа оператора в непредсказуемых ситуациях. В этом случае выбор команд из ЗУ 14 определяется генератором 16 случайных чисел.Контроль параметров оператора 1 при работе в стрессовых ситуациях моделируется путем подачи сигналов экстремального характера, например световых и звуковых сигналов значительной интенсивности (или редкого вида), от индикатора 17 аварийных ситуаций.Способность оператора 1 к адаптации и к вероятному прогнозированию ситуаций при наличии дополнительной избыточной информации контролируется в режиме, когда подаются специальные упреждающие очередную команду или набор команд сигналы с индикатора 18.В реальной обстановке в большинстве случаев оператор имеет сигнал обратной связи, т. е. результат выполнения команды, что позволяет ему оптимизировать свои последующие действия.Режим работы в таких ситуациях моделируется подачей сигналов обратной связи с выходом блока 2 органов управления и блока 3 датчиков. Их выходные сигналы, сформированные преобразователем 24 механических усилий и преобразователем 25 напряжений, поступают соответственно на имитатор 21 механических воздействий и задающий индикатор 15.Наличие этих сигналов обратной связи позволяет существенно повысить достоверность контроля оператора 1 в вышеописанных режимах, особенно это относится к режиму работы в аварийных ситуациях. В этом случае весьма эффективно с помощью имитатора 21 моделируются катастрофические отказы в комплексе, звеном которого является оператор 1.Достоверность получаемых данных повышается также за счет введения генератора шума 22, выдающего сигналы на индикатор 15 и через электромеханический преобразователь 23 - на имитатор 21. Этот режим соответствует работе в реальной обстановке, т. е. при наличии мешающих факторов различной природы.Наличие решающего устройства 9, производящего обработку в реальном масштабе времени всех данных, поступающих с ЛЦП 8, измерителя 7 и анализатора 6, позволяет контролировать способность оператора 1 к оптимизации своих действий, а адаптации и к обучению. Решающее устройство 9 непрерывно или в моменты времени, определяемые программно-управляющим блоком 11, выдает на фиксирующий индикатор 26 информацию о результатах действий оператора 1, например, 453674в виде оценок в той или иной системе. На индикатор 26 одновременно поступают отметки времени от датчика 20 временных интервалов, а также может поступать информация о числе неправильных реакций (сбоев) от счетчика сбоев 27.Работа всей системы координируется и синхронизируется программно-управляющим блоком 11, который в общем случае может управлятьсяя преподавателем.Данная система автоматического контроля может с высокой степенью эффективности использоваться для обучения и тренировки операторов в значительном диапазоне ситуаций широкого класса систем человек - машина,Предмет изобретенияСистема автоматического контроля параметров оператора в контуре управления, содержащая дишифратор-распределитель, соединенный с индикатором упреждающих сигналов, индикатором аварийных ситуаций, генератором случайных чисел, адресным устройством, управляемым генератором импульсов и датчиком временных интервалов, запоминающее устройство, вход которого соединен с генератором случайных чисел и адресным устройством, а выход - с задающим индикатором, последовательно соединенные блок органов управления, блок датчиков, компаратор и регистратор, анализатор последовательности реакций и измеритель временных интервалов, первые входы которых подключены к первому входу компаратора, вторые входы - ко второму входу компаратора и через формирователь эталонных сигналов - к адресному устройству, а выходы - к регистратору, аналого-цифровой преобразователь, вход которого соединен с выходом компаратора, а выход - с соответствующим входом регистратора, и про граммно-управляющий блок, соединенный сдешифратором-распределителем, управляемым генератором импульсов, адресным устройством, запоминающим устройством, формирователем эталонных сигналов, блоком дат чиков и регистратором, отличающаясятем, что, с целью повышения эффективности контроля, она содержит последовательно соединенные генератор шума, управляющий вход которого соединен с дешифратором-распреде лителем, электромеханический преобразователь, другой вход которого соединен с выходом запоминающего устройства, и имитатор механических воздействий, вход которого через преобразователь механических усилий сое динен с выходом блока органов управления,преобразователь напряжений, вход которого соединен с другим входом компаратора, а выход - с задающим индикатором, решающее устройство, счетчик сбоев и фиксирующий ин дикатор, причем решающее устройство соединено непосредственно и через счетчик сбоев с фиксирующим индикатором, который также подключен к первому выходу датчика временных интервалов, с анализатором последова тельности реакций, с измерителем временныхинтервалов, с аналого-цифровым преобразователем, с регистратором, со вторым выходом датчика временных интервалов и с программно-управляющим блоком, который также 35 соединен с управляющими входами преобразователя механических усилий и нреобразователя напряжений.
СмотретьЗаявка
1898889, 05.02.1973
В. В. Вершинин Московский опытный механический завод
МПК / Метки
МПК: F02D 25/00, G05D 13/34
Метки: контуре, оператора, параметров
Опубликовано: 15.12.1974
Код ссылки
<a href="https://patents.su/3-453674-sistema-avtomaticheskogo-kontrolya-parametrov-operatora-v-konture-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система автоматического контроля параметров оператора в контуре управления</a>
Измеритель серии временных интервалов

Номер патента: 930213
Опубликовано: 23.05.1982
Авторы: Вашкевич, Гурин, Коннов
МПК: G04F 10/00
Метки: временных, измеритель, интервалов, серии
...чего нониусный преобразователь может быть запущен повторно. Информация в первое и второе запоминающее устройство записывается по переднему фронту сигнала записи. Пара информационных слов, записанных одновременно в первое и второе запоминающие устройства, определяет номер нсниусного преобразователя, окончившего преобразование, и момент окончания его работы. Информация из нониусных преобразователей, первого и второго запоминающих устройств, поступает в вычислитель/ ный блок В, где величина и-го временного интервала Т, определяется по формулеТщ ТОНО Ио )+(1-1) и+1 - номер измеряемогоинтервала;и. - число нонну сныхпреобразователейномер нониусногопреобразователя,запущенного импульсом, отмечающим начало интервала Т, уномер...
Измеритель временных интервалов

Номер патента: 935962
Опубликовано: 15.06.1982
Автор: Кайданов
МПК: G04F 10/04
Метки: временных, измеритель, интервалов
...счетчика временных интервалов, вход 9 счетчика 4 временных интервалов, являющийся сигналом пересчета, входы 10-12 блока 3 синхронизации, являющиеся соответственно выходным сигналом генератора 2 временных интервалов,(3) Цель достигается тем, что в измеритель временных интервалов,содержащий генератор временных интервалов и счетчик временных интервалов, введены генератор синхронизирующих импульсов и блок синхронизации, входц которого соединены с выходами генератора временных интервалов, генератора синхронизирующих импульсов и счетчика временных интервалов, 1 р входы которого подключены к выходам блока синхрониаации.Блок синхронизации может содержать последовательно соединенные первый триггер, первый элемент И, второй триггер и второй...
Измеритель однократных временных интервалов

Номер патента: 558262
Опубликовано: 15.05.1977
Авторы: Александров, Болдицкий, Мадяр, Федоров
МПК: G04F 10/04
Метки: временных, измеритель, интервалов, однократных
...20 одновременно с кодом двух ячеек 1 О, 11 основного счетчика. Г 1 о концу измеряемого временного интервала, поступающего по входу 1, формирователь тактов 27 вырабатывает два импульса, сдвинутых по времени друг относительно друга.Для удобства анализа кодов вспомогательных счетчиков в основной счетчик записано число, равное его емкости, в результате чего все ячейки основного счетчика (в том числе и первые две) имеют единичные состояния. Схема сравнения кодов работает таким образом, что на ее выходах вырабатываются единичные (разрешающие) уровни напряжения при несовпадении кодов второго, третьего и четвертого вспомогательных счетчиков с кодом первых двух ячеек основного счетчика соответственно. Если состояния первых двух ячеек...
Устройство для измерения временных интервалов

Номер патента: 617769
Опубликовано: 30.07.1978
МПК: G04F 10/00
Метки: временных, интервалов
...вход У-й д-разрядной группы счетчика(фиг. 2, е).Импульс окончания первого временногоинтервала 12 (фиг. 2,в) изменяет состояниеУ-го блока управления на обратное, и имО пульсы генератора 1 прекращают поступать на вход У-й д-разрядной группы счетчика 2. В результате в У-й группе разря.дов счетчика записывается код, соответ.ствующий первому временному интервалу5 Деее. Пока идет заполнение этой группы импульсами, информация о первом временном интервале М списывается из У-й д-разрядной группы счетчика и группа обнуляется. После заполнения (У в 1)-й 5 группы импульсы переполнения через элемент ИЛИ 3, включенный между ее выходом и входом У-й г 1-разрядной группы счетчика 2, передаются на вход последней.Третий импульс (фиг. 2,г) проходит на 10...
Устройство порогового контроля временных интервалов

Номер патента: 488336
Опубликовано: 15.10.1975
Автор: Каминский
МПК: H03K 5/18
Метки: временных, интервалов, порогового
...в единицах времени,Выходным напряжением с генераторов 3 ч 4 через электронные;ключи б и 7 заряжаются интегрирующие конденсаторы 8 и 9 соответственно. Дифференциальный усилитель 10 сравнивает два постоянных напряжения, снимаемых с конденсаторов 8 и 9. Причем величина напряжения, снимаемого с конденсатора 9, несет в себе информацию о периоде (длительности) входного сигнала. Разность проинтегрированных значений напряжения измеряется с помощью индикатора 11, который является нагрузкой дифференциального усилителя 10. Индикатор представляет собой стрелочный прибор с нулем по середине, проградуированный в единицах времени.При совпадении контролируемого временного интервала с величиной времени, установленной по отсчетному...
Предыдущий патент: Устройство для автоматической импульсной подачи шлифовального круга
Следующий патент: Сигнализатор уровня электропроводнойжидкостиs; jif
Случайный патент: Фильтр для очистки жидкости