Устройство для моделирования самонастраивающихся систем управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 446077
Автор: Малахов
Текст
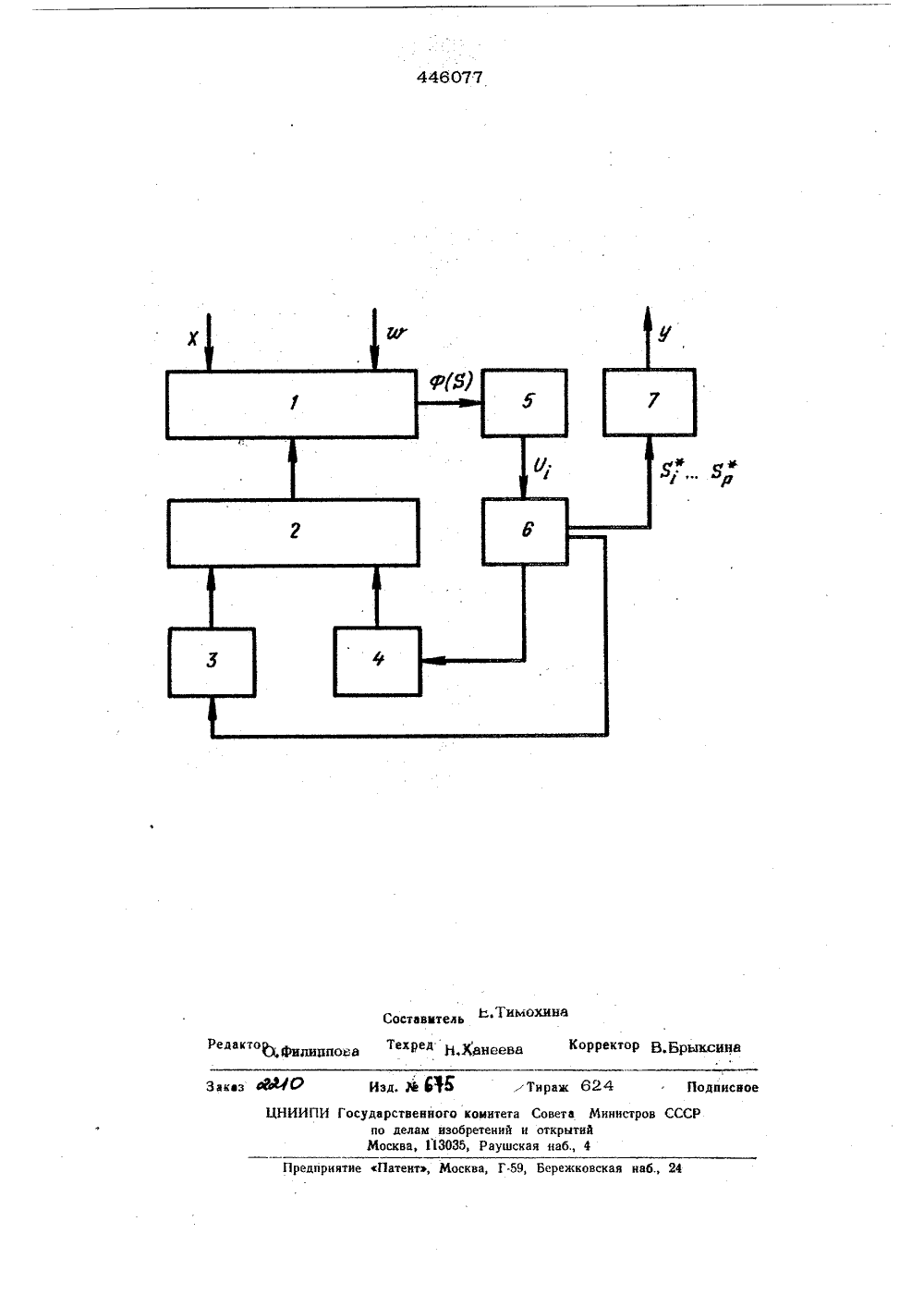
9О П И С А Н И Е,ИЗОБРЕТЕ Н ИЯ Союз Советских Социалистииескик Республик( 067/4 м заявк с присоеди Гасудврствеиннй иомитеСаввтв Мииистрав СССРпе делам изобретенийи птирптий) Дата опубликован исанин 06.06.75 2) Автор,. изобретени пахов Ордена 11 енна и ордена Трудового Красного Зналеии высштехническое училише им. Н. Э. Баумана 71) Заявител(54) УСТРОЙСТВО Д 11 Я МОДЕЛИРОВАНИЯ САМОНАСТРАИВАЮШИХСЧ СИСТЕМ УНРАВ 11 ЕНИЯ а фуйства схема предлагаемого устр Оно ссдерит блок функционала блок, 2 15 нейных движений, блок чальных условий, блок 4 направлений, блок 5 опре экстремумов, блок 6 пам1ге 3 вани ерации прямолиопределения нафорлированияделения условныти и интеграто 20 Блок формирова назначен для образ входов объекта и в функционала Ф ( объекта управления яб Блок 2 генерир ия функционала 1 пре ования по матрице Х о выхода екторул/ Я ) ошиб ели т такие изменения Изобретение относится к области технической кибернетики и предназначено для моделирования самонастраиваюшихся систем управления. Полученная модель объекта может использоваться, например, для опти мизации управления ъехнологическили процессами.Известны устройства для моделирования самонастраиваюшихся систем управления, содержащие интегратор и блок определения условных экстремумов. Однако эти устройства имеют невысокое быстродействие, что объясняется взаимным влиянием каналов изменения настраиваемых параметров люде. ли.Для увеличения быстродействия в предлагаемом устройстве каналы настройки специальным образом разделены и сгрупцированы, В цел установлены блок памяти, первый выход которого подключен ко входу интегратора, блок формирования направлений и блок определения начальных условий, входы которых подключены соответственно ко второлу и третьелу выходам блока памяти, и последовательно соединенные блокгенерации прямолинейных движений и блокформирования функционала, выход которогоподключен ко входу блока определенияусловных экстремумов, причем выходыблоков определения начальных условий иформирования направлений соединены ссоответствующими входами блока генерациипрямолинейных движений, а выход блокаопределения экстремумов подключен коО входу блока памяти.На чертеже представлен нкциональнпараметров модели," которьге, соответствуют, прямолинейным траекториям в пространстве этих параметров, проходяшнм через заданные начальные точки, координаты которых вырабатываются блоком 3 параллельно заданным направлениям, которые формируются блоком 4. Блок 5 выделяет точкигде достигается минимум функцис 1нала ф ( 8 ) при изменении параметров лгодели вдоль прялюлинейных траекторий, 10 и эти точки запоминаются блоком 6. Причем блоки 3 и 4 имеют два режилж в первом из них блок 3 вырабатывает начальные точки Е по двум исходным точкам1 б1 г 2 г 3 1 " ," )И Ь 626 б,В) Ь биде .1= (2,ЗА1 Е 2=(,ф 1,62,Аб,Ь, ) И=(61,82,6, Ь, ) Е=АЕ 2 ЕЭ 8 Е ")20 общим числом 21 т 1, где 1 т 1 - количество неизвестных параметров модели, а блок 4 форллирует направления, параллельные одной из выбранных координатных осей. Во второгмщ режиме блок 3 в качестве начальных точек выдает точки О, хранящиеся в блоке 6, а блок 4 вырабатывает направления, параллельные отрезкам соединяющим пары тех же точек ), По окончании процесса ЗО настройки в блоке памяти 6 оказывается% Ьзафиксированной точка ( 81, 8 2, " 1 Вгтг )доставляющая минимум функционалу ф ( 3 ) и имеющая своили координатаг.и искомые значения параметров людели, Блок Зб 7 формирует дифференциальные уравнения траектории наискорейшего спуска в прост- ранстве управляющих переменных объекта, интегрирует их на заранее заданном про лежутке врелсени и образует новые зна чения управляющих переменных.В исходном положении все блоки находятся в режиме ожидания. С приходом сигналов, соответствующих матрице Х и вектору 9, начинается ик работа. Сна б чала в блоке 1 формируется функционалф () и затем блок 2 начинает поочередно генерировать прямолинейные движения с помощью блоков 3 и 4, работающих в первом рехиме, В общей сложности генерируется 2 таких движений, и впроцессе каждого из них блок 5 выделяетточку 0 л условного минимума функцио-нала ф ( 3 ), которая запоминается, блоком 6, Таким обраэолг в блоке 6 фиксируется первая серия точек О, Затем блоки Эи 4 цереключаются на второй режим и начинагот илгесте с блоком 2 образовывать прямолинейные движени я: по последовательным парилточек Ц, начи 3. ная с первой, Общее число ТМихдвиженийг в этой серии 2, а блоКи б и 6 фиксируют новую серию точек Цусловных минимумов, Указанные действия повто ряются, образуя каждый раэ уменьшающуюся серию точек О; уСловных минимумов. Последняя точка 1 , зафиксированная в блоке 6 как результат движения по самому общему направлению, соответствует исколгылг значениям Я", В г" г Ига . параметров лгоделй, Часть этих значенийкЯ 1 г 8 2 г " г 8 р, соответствующая Р угтравляюшим переменным, поступает в блок 7,и по ним образуется новое значение управляющих воздействий 1" ( У 11 У 21"1 3 р ) 1обеспечивающее улучшенную величину пока. -зателя оптимальности управления объектом.Предмет изобретенияУстройство для моделирования самонастраивающихся систем управления, содержащее интегратор и блок определенияусловных экстремумов, о т л и ч а ю -ш е е с я тел, что, с целью увеличениябыстродействия; оно содермит блок палгяги,первый выход которого подключен ко входуинтегратора, блок форгирования нанравлений и блок определения начальных условий,входы которых подключены соотвегственноко второму и третьелгу выходам блокапаг.гяти, и последовательно соединенныеблок генерации прямолинейных движенийи блок форл 1 ирования функционала, выходкоторого подключен ко входу блока определения условных экстремумов, причемвыходы блоков определения начальныхусловий и формирования направлений соединены с соответствуюшигми выходами бэокаггенерации прял,оэинейных движений, а выходблока определения экстремумов подключенко входу блока памяти,446077 оставитель Текред ,Хвнеева Корректор 3,5 рыксИн едактоь редпрнятие Патент, Москва, Г 59, Бережковская наб., 24 Заказ ФЬМР Изд. М ИЯ . Тир ЦНИИПИ Го сударственного комитета Сов по делам изобретений и от Москва, 13035, Раущскаяж 624Подписное ета Министров СССР рытийаб., 4
СмотретьЗаявка
1879859, 12.01.1973
ОРДЕНА ЛЕНИНА И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ВЫСШЕЕ ТЕХНИЧЕСКОЕ УЧИЛИЩЕ ИМ. Н. Э. БАУМАНА
МАЛАХОВ НИКОЛАЙ АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: G06G 7/48
Метки: моделирования, самонастраивающихся, систем
Опубликовано: 05.10.1974
Код ссылки
<a href="https://patents.su/3-446077-ustrojjstvo-dlya-modelirovaniya-samonastraivayushhikhsya-sistem-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для моделирования самонастраивающихся систем управления</a>
Устройство для передачи переменных параметров

Номер патента: 555420
Опубликовано: 25.04.1977
Автор: Иванов
МПК: G08C 19/28
Метки: параметров, передачи, переменных
...посылки 9, Чет)черты)1, пя. тый и цтестой выходы блока управления 1 соепи- ИЕНЫ т;ООтВЕтетВЕННО С НЕрВЫМИ ВХОдаМН бЛОКа (рОрМИровВЬЛ Ын(1)орМацИОННОЙ ПОСЫЛКИ 5 г ОЛОКа формирования ВременРой посылки 9, и блока форьпрованыя выходного сигнала 11. Выходы блока форь)ирования информационной посылки 5 и блока формирования времеН(ой посылки 9 подключены соответственно ко второму и третьему входу блока формирования выхоДИ(но сигнала 11. Первый, вто.рой и третий вхолы блока определения погрешности гередачи информации 1 О соединены соответственно с восьмым Выходом блока управления 1 и Выходами блока формирования информационной посылки 5 и блока формирования временной посылки 9. Втдход блока определения погрешности переда ги информации 10...
Устройство контроля и сортировки деталей по их акустическим параметрам

Номер патента: 745551
Опубликовано: 05.07.1980
Автор: Дастакян
МПК: B07C 5/06
Метки: акустическим, параметрам, сортировки
...сигнал поступает с выходаблока 8 коррекции. Получив команду свыхода нуль-органа б, автоматическипереключаются аттенюаторы шумомера5 и блоха 8.коррекции до тех пор, пока на выходе схеьа 7 сложения не сформируется сигнал,. соответствующий ис тинному уровню входного сигнала на входе микрофона шумомера 5. Прй этом, при равенстве сигналов на обоих входах нуль-органа б, с его выхода поступает запрет на вход блока 8 кор рекции,.Далее сигнал с выхода схемы 7 сложения поступает на вход преобразователя 9 аналог-кода, в котором сигнал преобразуется в двоичный код. При 50 этом в регистре 11 Р устанавливается (заранее набирается) опорный уровень в децибелахОпорный уровень устанавливается с учетом норм точности по ГОСТ 1643-56,С выхода...
Устройство для проверки временных параметров номеронабирателей телефонных аппаратов

Номер патента: 1107329
Опубликовано: 07.08.1984
МПК: H04M 1/24
Метки: аппаратов, временных, номеронабирателей, параметров, проверки, телефонных
...первый блок 11сброса, элемент ИЛИ 12, второй блок13 памяти, первый блок 14 памяти,блок 15 контроля допусков параметров,счетчик 16 пар проверки и индикатор17 сбоя,Блок 9 регистрации порядковогономера и рода сбоя содержит параллель"но включенные цепи, каждая из которыхсостоит из последовательно соединенных первого элемента И-НЕ 18 -18,триггера 19 -19,8 и второго элемента И-НЕ 20, -20, а также дополнительный элемент И-НЕ 21, первый элементНЕ 22 и второй элемент НЕ 23.Устройство работает следующим образом. Во врсмя обратного хода диска подключенные к блоку 4 управления контакты проверяемого номеронабирателя 8 телефонного аппарата формируют импульсы, Передний фронт первого импульса с второго выхода блока 4 управления устанавливает в...
Устройство для определения ускорений произвольной точки судна

Номер патента: 1816968
Опубликовано: 23.05.1993
Авторы: Александров, Алешин, Амплеев, Гал, Жуков, Некрасов, Снигур
МПК: G01C 21/18
Метки: произвольной, судна, точки, ускорений
...6 и созгсоответственно иэ блоков 30 и 37 поступаютна блок 156 перемноженияд на ЧозЧ, в котором преобразуются в сигнал (дсозУ), ко торый передается в блок,157 перемножения 20сов У на произведение (д созт), на.вход которого подается также сигнал совУ иэ блока41, а на выходе вырабатывается сигнал(ф=8 совУ совт -Узпт), на вход которого 25также подается сигнал (- т з 1 п 7) из инвертора 159 произведения (Узпт"), который получает сигнал (У з 1 п Ч ) иэ блока 160перемноженияУна 3 пу, на входы которого.поступают сигналцФ и в 1 п г соответственно 30иэ блоков 34 и.40, Сигналы дк=Фза фР,(я =УсоИщ УйбУ) и (ц ФссеМсозтвоТ)соответственно иэ сумматоров 151, 153 и .158 передаогся в блок 27 вычислейия про. екций углового ускорения айд и блок 29...
415496

Номер патента: 415496
Опубликовано: 15.02.1974
МПК: G01D 9/28
Метки: 415496
...заданные,5 промежутки времени. На,ход блокапоступают значения регистри,емых координат, пхноминальные значения и сигналы блока 3.Выходом блока 1 является бланк цифровойрегистрации.10 Блок 3 формирует дискретные сигналы оналичии отклонения параметров от нормы покаждому каналу и имеет трп выхода выосг(ОВ - ) выбег есть,Блок 2 формирует дискретные сигналы оналичии экстремумов (относительно номина 20 лов) по любому из каналов 1,егпстрацип и пхзапоминание на промежуток времени от момента появления до момента печати их пабланке. Входные сигналы блока 2 - сигнал сблока 3 и значения регистрируемых координат25 с объекта Хи Л 1 г),Блок 2 состоит из индикаторов экстремумаи ячеек аналоговой памяти по числу входных регистрируемых координат.Блок 2...
Предыдущий патент: Устройство для задания граничных условий
Следующий патент: Устройство для моделирования маршрута движения, минимизирующего время встречи
Случайный патент: Фреза для выборки борозды