Вптб -г. 11 tfn”tp. -. 7 i
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
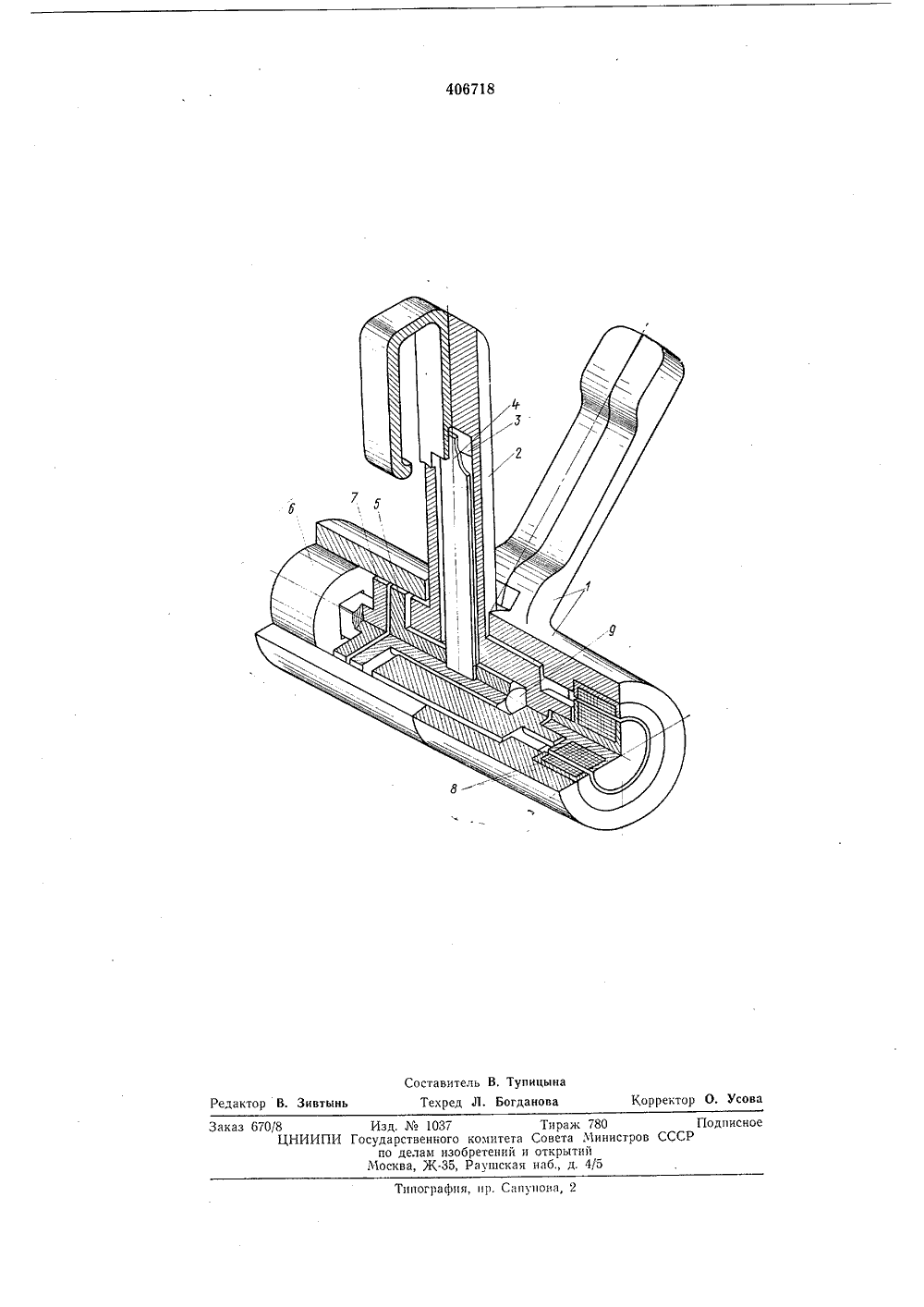
О П И С А Н И Е 40678ИЗОБРЕТЕНИЯ Союз Советских Социалистицеских Республик,Х,1971 ( 1707053,125-8 Заявленос присоед нением заявкиосударстаенныи камитеСовета Министров СССРпо делам изобретенийи открытий риоритет Опубликовано 21.Х 1.1973, Б К 62-526(088 летеньДата,11.19 ликования описан Авторыизобретени А, Васильев, с аявите СХВ актильно-мышечными связяри отслеживании изменяю- релейном приводе и любой ном приводе неизбежны заи работе двигателей привоИзобретение относится к манипуляторам с дистанционным управлением и может быть использовано при создании задающего органа очувствленного дистанционного копирующего манипулятора.Известны суставы задающих органов очув. ствлеиных манипуляторов, в которых для воспроизведения усилия нагрузки исполнительного органа на руке оператора используется специальный следящий привод релейного или линейного типа, причем усилие привода передается иа руку оператора через упругий элемент, пружину или торсиои, которые в совокупности с измерителем деформации являются также датчиком обратной связи в канале отражения усилий.Недостатком суставов и схватов с указанными системами отражения усилий являются относительная сложность конструкции, требующая размещения в суставе датчика-измерителя деформации упругого элемента и обеспечения боль шои точности измерений, сложность системы управления приводом, когда в приводе релейного типа необходимо иметь линейное сравнивающее устройство на входе следящей системы и, наконец, сложность задачи обеспечения устойчивости многокоитурной замкнутой системы, включающей канал управления положением, канал отражения усилия и человек-опертор с его зрительными и тми. Кроме того, пщейся нагрузки внагрузки в линей5 траты энергии прдов.Таким образом, целью изобретения является упрощение конструкции сустава задающего органа и его системы управления, сииже- О иие веса и потребляемой энергии и облегчение задачи обеспечения устойчивости замкнутого контура управления манипулятора,Предлагаемое изобретение отличается отизвестного тем, что плоская пружина, выпол ияющая роль упругого элемента, помещенвнутри паза подвижной скобы схвата, причем одни конец плоской пружины расположен между упорами с зазором, а другой жестко соединен с фиксируемой частью фиксатора, 0 установленного таким образом, что в отключенном состоянии его фиксируемая часть имеет возможность свободного вращения вместе со скобой, а во включенном состоянии фиксатора - жестко связана с рукояткой схвата.5 На чертеже изображен схват задающегооргана очувствленного дистанционно-копирующего манипулятора, состоящий из рукоятки 1 с разъемным корпусом, подвижной скобы 2 с упором 3, имеющей паз, в котором помеще- О и плоская пружина 4, выступающим концом3соединенная с фиксируемой частью 5 фиксатора 6, имеющего фиксирующий элемент 7. С подвижной скобой 2 соединен ротор 8 дат. чика угла, статор которого установлен в корпусе рукоятки 1, при этом в полости скобы установлен подпятник 9.Относительно рукоятки 1 оператор свободно перемещает подвижную скобу 2 при выключенном фиксаторе 6, не ощущая усилий сопротивления (кроме сил трения) в кинематических парах. Датчик угла 8, ротор которого связан со скобой 2, а статор с рукояткой 1, вырабатывает сигнал, пропорциональный относительному углу их поворота, причем этот сигнал отрабатывается приводом исполнительного захвата. В том случае, если па пути исполнительных губок захвата встречается твердый предмет, датчик нагрузки исполнительного схвата вырабатывает сигнал, включающий фиксатор 6, в результате чего фиксирующая деталь 7 соединяется с фиксируемой деталью 5 и конец пружины 4 оказывается связанным с корпусом рукоятки 1. Оператор, продолжая движение скобы 2 в том же направлении, деформирует пружину 4 и ощущает отраженное сопротивление нагрузки, которое возрастает в приводе исполнительного органа линейно, как и сопротивление пружины в зависимости от приращения управляющего сигнала после соприкосновения с твердым объектом манипулирования, Фиксатор в этом случае управляется релейной системой от датчика нагрузки исполнительного захвата, Для получения оптимального эффекта в экономии энергии фиксирующий элемент отключенного фиксатора может иметь два устойчивых состояния - соединенное и разъединенное с фиксируемой деталью 5 - в этом случае управление фиксатором производится с помощью триггерной схемы.Для уменьшения мощности необходимойдля приведения фиксатора в действие между одним из концов пружины 4 и фиксируемой частью 5 фиксатора 6 установлена повышаю щая передача (на чертеже не показана), приэтом усилие фиксации уменьшается пропорционально ее передаточному числу. Предмет изобретения151. Схват задающего органа очувствленногодистанционного копирующего манипулятора, в рукоятке которого установлены подвижная скоба с плоской пружиной, датчик угла и ди станционно-управляемый фиксатор, отличаюиийся тем, что, с целью упрощения конструкции и системы управления, плоская пружина помещена в пазу подвижной скобы и жестко соединена с фиксируемой частью фиксатора, 25 установленного в рукоятке таким образом,что в отключенном состоянии фиксатора его фиксируемая часть имеет возможность свободного вращения совместно со скобой, а во включенном состоянии фиксатора - жестко 30 связана с рукояткой схвата.2. Схват по п. 1, отличающийся тем, чтов рукоятке установлен фиксатор, имеющий в выключенном состоянии два устойчивых положения фиксирующей детали, соединенное 35 и несоединенное с фиксируемой деталью,Редактор В. Зивтынь Корректор О. Усова Типографии, пр. Сапунова, 2 Заказ 670/8 Изд, Мо 1037 Тираж 780 Подписное ЦНИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий Москва, Ж, Раушская иаб., д. 4/5
СмотретьЗаявка
1707053
В. А. Васильев, А. И. Калинин
МПК / Метки
МПК: B25J 13/02
Опубликовано: 01.01.1973
Код ссылки
<a href="https://patents.su/3-406718-vptb-g-11-tfntp-7-i.html" target="_blank" rel="follow" title="База патентов СССР">Вптб -г. 11 tfn”tp. -. 7 i</a>
Система регистрации состояния забойного оборудования

Номер патента: 768973
Опубликовано: 07.10.1980
Авторы: Кузнецов, Науменко, Селиверстов
МПК: E21C 27/32
Метки: забойного, оборудования, регистрации, состояния
...элемента 1, 2 и 3, которые сигнализируют об исправном состоянии оборудования. Контакты элемента 5, согласно5 10 15 20 25 30 35 40 45 50 55 60 65 технологической цепи включения комплекса 1 в работу, замыкаются последними, Они же размыкаются последними при выключении комплексов. Через контакты элементов 1,2,3 и 5 необходимое разрешающее напряжение подается на элементы, связанные с ними. Дешифратор 7 при этом не выдает разрешающего потенциала на выходы 10, 11 и 12 и выдает разрешающий потенциал на выход 13. Триггеры 9 и 18 находятся в нулевом состоянии, и триггер 9 выдает по нулевому выходу разрешающий потенциал на элемент 8 (схема И), на второй вход которого уже подан разрешающий потенпнал через контакты элемента 8. и воз. никновении...
Беспроводная система контроля состояния массива горных пород

Номер патента: 1198203
Опубликовано: 15.12.1985
Автор: Манукян
МПК: E21C 39/00
Метки: беспроводная, горных, массива, пород, состояния
...1 реле 1 времени, Если же Ь( Апор, то блок 7 управления не включает ключ 11 и блок 12 кода адреса, а сразу вырабатывает импульс сброса, поступающий на вход сброса реле 1 времени, и счетный: импульс, поступающий на счетный вход счетчика 4 циклов. После чего реле времени прекращает выработку рабочего импульса, а содержимое счетчика 4,циклов увеличивается на единицу. Если условие ( ь 1Ь ор будет выполнено подряд М раз ( где М ,емкость счетчика 4 циклов), то счетчик 4 циклов переполнится и на его выходе появится импульс переноса, который будет подан на вход блока 7 управления, При наличии импульса переноса блок 7 управления выдает такие же команды, как и в случае, когда 1 И порВ левой части временных диаграмм, изображенных на...
Бесконтактный электродвигатель постоянного тока для привода маховичного исполнительного органа системы ориентации и стабилизации летательных аппаратов

Номер патента: 577614
Опубликовано: 25.10.1977
Авторы: Овчинников, Сочивко
МПК: H02K 29/02
Метки: аппаратов, бесконтактный, исполнительного, летательных, маховичного, органа, ориентации, постоянного, привода, системы, стабилизации, электродвигатель
...1 и 2 двигателя.Полуобмотки имеют одинаковое количество витков и Равное омическое сопротивление, поэтому при пуске двигательпотребляет ток, вдвое меньший пускового тока одной полуобмотки, и требуемыйпусковой момент обеспечивается засчет большого числа витков. Однако поэтой же причине вдвое увеличиваетсяпротиво-ЗДС, уменьшается скоростьидеального холостого хода и максима.Юльный кинетический момент исполнительного органа. Для достижения требуемой максимальной скорости вращениямаховика применяется вторая ступеньразгона, при которой заперт ключ 4и открыт ключ 6,Развязывающие диоды 7 исключаютпри этом из работы полуобмотки 2 ипозволяют подвести напряжение источника питания к полуобмотке 1, Включение этих обмоток в работу происходитпосле...
Индикатор аварийного состояния трехфазной системы переменного тока

Номер патента: 610230
Опубликовано: 05.06.1978
Авторы: Богорад, Иванов, Циркин
МПК: G01R 31/02, H02H 3/34
Метки: аварийного, индикатор, переменного, системы, состояния, трехфазной
...импульсов образуются отрицательные импульсы напряжения, смещен.ные один относительно другого во времени.Эти импульсы "поступайтна входы логических элементов И 4, но ни на одном входе этих элементов импульсы не совпадают во времени, Таким образом на выходе любого логического элемента И 4 импульсы не выделяются, Напряжения с дополнительных вторичных обмоток подают на входы трех других,выпрямительных мое. тов 2 Фильтры вьптрямительных мостов 2 сглаживают выпрямленное напряжение, которое подают на: три входа логического элемента И - НЕ 5. В этом случае на выходе последнего напряжение отсутствует, Так как выход логического элемента И - НЕ 5 так же как и выходы трех элементов совпа. дения И 4) подключен ко входам логического ,элемента...
Устройство для настройки источника питания датчика положения исполнительного регулирующего органа

Номер патента: 1246057
Опубликовано: 23.07.1986
Автор: Ратушный
МПК: G05B 23/02
Метки: датчика, исполнительного, источника, настройки, органа, питания, положения, регулирующего
...по указателю 2 положения, Второй человек находится н сборках автоматического регулирования и по информации, ,полученной от первого находящегося у блочного щита, регулировочными элементамиисточника 1 питания настраивает его. Настройка производится таким образом: полностью открывают регулирующий. орган 4; регулировочным резистором1 устанавливают стрелку указателя 2 положения на 1007.; полностьк эакры 124605710 5 35 40 45 50 55 Устанавливают переключатель в третье положение, при котором через коммутаторы 7, 9 к источнику 1 питания подключают имитатор О или 11 и указатель 8 положения. С помощью имитатора 10 или 11, используя зафиксированные ранее на шкале имитатора значения, соответствующие открытому и закрытому положениям регулирующего...
Предыдущий патент: Слесарное зачистное устройство
Следующий патент: Труборез
Случайный патент: Способ получения окатышей