Способ определения рельефа и уровня поверхности
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 301104
Авторы: Афанасьев, Гайдучик, Грузин, Центральный
Текст
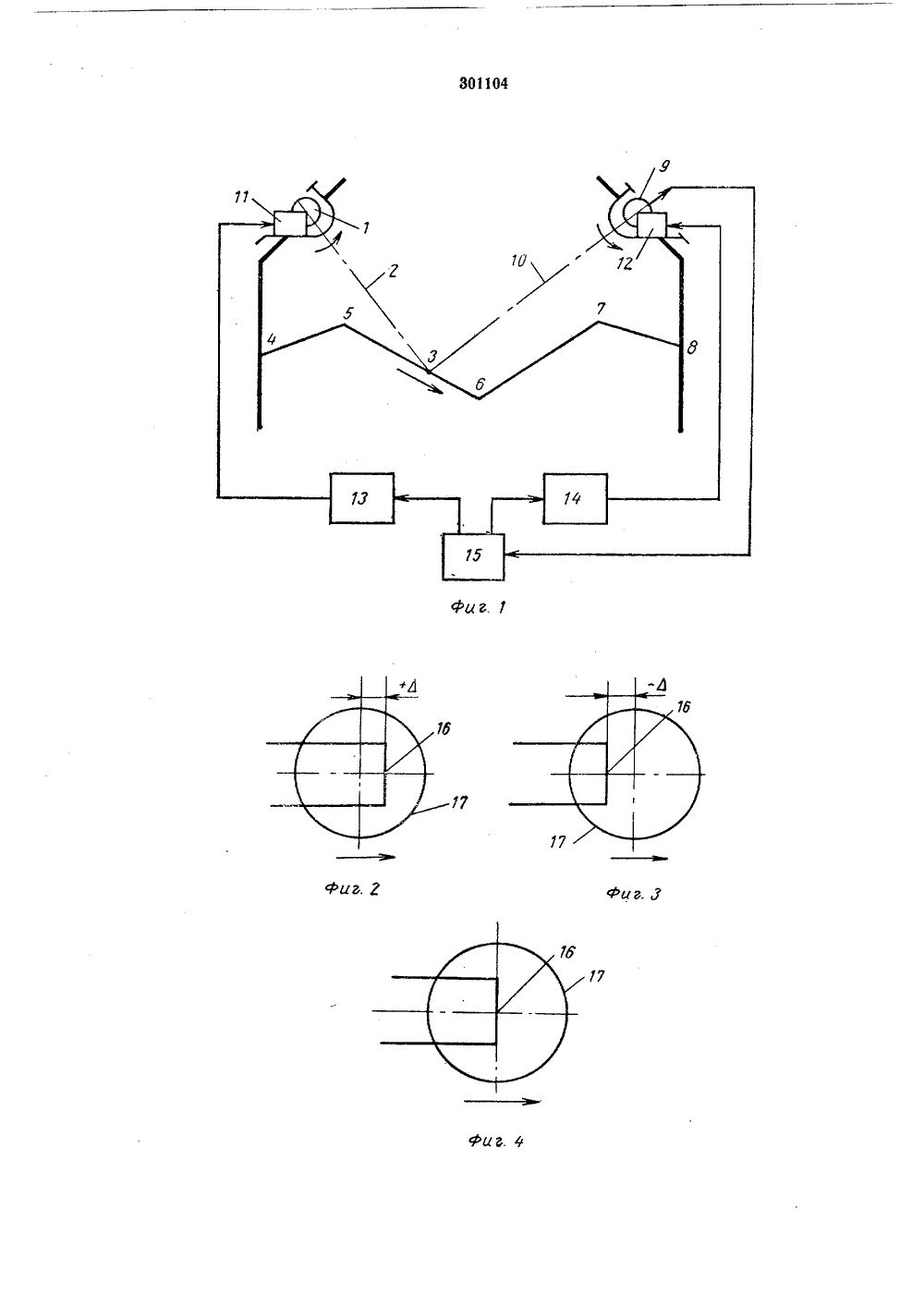
30 04 ОПИСАНИЕ ИЗОБРЕТЕН ИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУСоюз Саветскин Социалистическин РеспублинЗависимое от авт. свидетельства237411Заявлено 12,711.1968 ( 1262818/26-25) б 011 23/28 6 01 Ь 15/04 исоединением заявки 3 Чв -риоритет Комитет по делам зобретеиий и открыти при Совете Мииистров СССРбликовано 08 Л,1973. Бю тень а опубликования описания 15,111.197 Авторыизобретени В. Н. Афанасьев, В, О. Гайду и П, Л. Грузи Заявител ий институт чернойрдина ентральныи нау метасследователь ии им. И, П. СОВ О ДЕЛЕНИЯ РЕЛЬЕФА И УРОВНЯ ПОВЕРХНОСТИ баланса используют для совместного управления подвижными элементами блока источника и блока, приемника излучения,Сущность изобретения поясняется на черте жах, где на фиг. 1 - схема реализации способа; на фиг. 2 - схема взаимного расположе,ння приемной и облученной зон при наличии динамической положительной погрешности; на фиг, 3 - то же, но при наличии отрицатель ной динамической погрешности; на фиг, 4 -то же, но при отсутствии динамической погрешности.1 - подвижный элемент блока источникаизлучения, Ориентацию его оси 2 меняют по воротом подвижного элемента, Прн этом граница облученной зоны 3 будет перемещаться по контролируемой поверхности, профиль которой показан в виде ломаной линии 4 в ,5 - б - 7 - 8. За перемещающейся границей об лученной зоны следят с помощью подвижногоколлимированного приемника отраженного излучения 9, ось ориентации которого обозначена цифрой 10. Ось показана ориентированной в точку 3, что условно означает идеаль ный случай - отсутствие погрешности слежения. При перемещении точки 3 (границы облученной зоны) по контролируемой поверхности ось 10 должна быть, постоянно ориентирована на границу (или в точку, отстоящую 30 от нее на величину меньшую, чем заранее заИзобретение относится к использованию атомно-ядерных излучений, в частности к ис. пользованию их для контроля рельефа поверхности вещества и может быть использовано в черной металлургии,Из основного авт. св.237411 известен способ определения координат рельефа поверхности вещества с использованием атомно- ядерных излучений. Однако при вращении подвижного элемента одного из блоков, например блока источника, с целью принудительного перемещения облученной зоны по заданной программе, скорость перемещения облученной зоны по рельефу произвольной пространственной формы оказывается неконтролируемой и может принимать на некоторых участках рельефа недопустимо высокие значения, что приводит к появлению переменной и неограниченной по величине динамической погрешности измерения.Кроме того, вследствие пре, арительного выбора пропраммы вращения подвижного элемента блока источника, время измерения конкретного рельефа неоптимально и существенно выше необходимого.Предлагаемое изобретение, усовершенствуя и дополняя способ по авт. св.231411, позволяет повысить точность измерения и уменьшить время измерения до минимальной величины. Это обеспечивается тем, что сигнал разУДК 681.123:532,217;531.данное значение динамической попрешности слежения).При сложном рельефе контролируемой поверхности, например поверхности, профиль которой приведен на фиг. 1, и заданной программе перемещения подвижного элемента скорость перемещения границы по профилю облученной зоны существенно,переменна. Она мала на участках типа 4 - 5 и б - 7, многоиратно увеличивается на участке типа 5 - б. Особенно неблагоприятным является участок типа 7 - 8.Подвижный элемент 1 и подвижный коллимированный приемник 2 имеют приводы вращения 11 и 12, соответственно управляемые от своих блоков 13 и 14 управления. Блоки 14 и 18, в свою очередь, управляются от блока 15 управления, связанного с приемником отраженного излучения 9.С помощью блока 15 выделяют величину и знак разоаланса, являющегося следствием разориентировки границы облученной зоны и центра приемной зоны, например способом, описанным в авт. св.237411, Сигнал, соответствующий разбалансу одного знака, передают в блок 12, сигнал, соответствующий разбалансу другого знака, - в блок И. Таким образом, .в блок 12 поступает сигнал, являющийся следствием разориентировки границы облученной зоны 1 б и центра приемной зоны 17 (см. фиг. 2), в блок 18, соответствующий схеме на фиг, 3.С помощью блоков 13 и 14 управляется движение подвижных элементов источника и приемника по следующему закону: если поступающий в эти блоки сигнал соответствует нулевому разбалансу (взаимное положение облученной и приемной зон на. фиг, 4), то указанные подвижные элементы вращают с максимальной скоростью в направлении, выбранном заранее так, чтобы облученная и приемная зоны перемещались по контролируемой поверхности в одном направлении. Если вследствие геометрии размещения источника и приемника или кривизны, поверхности облученная зона обгоняет приемную так, что ее граница сместится от центра приемной зоны более, чем на величину допустимой динамической по грешности +Л (см. фиг. 2), то сигнал разбаланса, имеющий знак +, подадут в блок 13, который и остановит вращение подвижного элемента источника 1. Скорость подвижного элемента в диапазоне между максимальным 10 и нулевым значением разбаланса регулируютпо некоторому закону (например, линейному) в функции от величины смещения границы облученной зоны по отношению к их центру приемной зоны на отрезке.Ч 5 Аналогичным образом управляют скоростьювращения подвижного элемента приемника с тем отличием, что нулевую скорость вращения ему сообщают при разбалансе, соответствующем смещению ( - Л), т. е. когда приемная 20 зона опережает движение облученной зоны.Таким образом приемистую зону и облученную перемещают по контролируемой поверхности так, что разориентировка границы и центра облученной зоны ни при каких условиях не 25 превышает заданной величины динамическойпогрешности.Предлагаемый способ обеспечивает автоматический выбор скорости перемещения зон в соответствии с заданной погрешностью и жри визной контролируемой поверхности. Приэтом измерение осуществляют в минимально возможное в данных условиях время, что обеспечивает маисимально возможное быстродействие системы в любой геометрии измерения, 35Предмет изобретенияСпособ определения рельефа и уровня поверхности веществ по авт. св.237411, отли чаюи 1 ийся тем, что, с целью повышения точности и уменьшения времени измерения, сигнал разбаланса используют для совместного управления,подвижными элементами блока источника и блока приемника излучения.
СмотретьЗаявка
1262818
В. Н. Афанасьев, В. О. Гайдучик, П. Л. Грузин, Центральный научно исследовательский институт черной металлургии И. П. Бардина
МПК / Метки
МПК: G01B 15/04, G01F 23/288
Метки: поверхности, рельефа, уровня
Опубликовано: 01.01.1971
Код ссылки
<a href="https://patents.su/3-301104-sposob-opredeleniya-relefa-i-urovnya-poverkhnosti.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения рельефа и уровня поверхности</a>
Зарядный блок источника сейсмических сигналов

Номер патента: 640222
Опубликовано: 30.12.1978
МПК: G01N 1/04
Метки: блок, зарядный, источника, сейсмических, сигналов
...управления 8 вырабатывает одиночный импульс, который отпирает коммутирующий прибор 1 в конце каждого полупериода питающего напряжения, в результате чего напряжение на первичной обмотке повышающего трансформатора мало, напряжение на вторичной повышающей обмотке трансформатора также мало, следовательно зарядный ток имеет небольшую величину.С ростом напряжения заряда накопительных конденсаторов 4, схема управления 8 начинает вырабатывать все большее число импульсов, которые поступают в цепь управления коммутирующего прибора 1, изменяют момент его отпирания относительно начала полупериода питающего напряжения. Режим работы схемы управления 8, задается величиной постоянного напряжения, снимаемого с делителя напряжения б, включенного...
Устройство для контроля источников сигнала

Номер патента: 586557
Опубликовано: 30.12.1977
Авторы: Ананьева, Беляков, Вишняков
МПК: H03K 5/18
Метки: источников, сигнала
...и входам элементов 6 и 13, выходы элементов 8, 10, 15 и 17 подключены соответственно к первым входам триггеров 11, 12, 18 и 19, выходы элементов 6 и 13 соединены с пер- О выми входами элементов 9 и 16, выходы элементов 7 и 14 соединены соответственно с вторыми входами элементов 9 и 16, выходы элементов 9 и 16 соединены соответственно с вторыми входами триггеров 11 и 18, выходы 5 которых соединены соответственно с вторымивходами триггеров 12 и 19.Устройство работает следующим образом.При нормальной работе источников 4 и 5на каналы 1 и 2 с выходов источников 4 и 5 О и с выхода элемента 3 поступают совпадаю586557 70 С+ Тираж 1080 д.1011 аказ 279 О ясное пографии, пр. Сапунова,3щие или перекрывающиеся сигналы. Прп этом на элементе 10...
Блок источника излучения

Номер патента: 319271
Опубликовано: 01.01.1971
Авторы: Гусев, Коль, Крейндлин, Пахунков, Соколов, Хахалин
МПК: G01F 23/288
Метки: блок, излучения, источника
...Известны блоки источников излучения для радиоизотопных уровнемеров, представляющие собой контейнер с коллимационной щелью, внутри которого помещен протяженный источник ионизирующего излучения, состоящий из набора отдельных элементов,Недостатком таких устройств является сложная зависимость выходных параметров детектора излучения от уровня измеряемой среды.В предлагаемом блоке с целью достижения линейности шкалы уровномера при различных видах контролируемых объектов каждый элемент источника выполнен подвижным вдоль коллимационной щели и снабжен средством фиксации его положения, определяемого по заданному закону распределения активности.Такое выполнение блока источника позволяет, располагая элементы источника в соответствии с выбранным...
Блок источника для дефектоскопии сварных швов

Номер патента: 1608756
Опубликовано: 23.11.1990
Автор: Сердюк
МПК: G01N 23/18, G21K 1/02
Метки: блок, дефектоскопии, источника, сварных, швов
...держатель 9 с источником 10 гамма-излучения фиксируется в отверстии втулки 7. Блок источника устанавливается внутри контролируемого изделия 11, снаружи которого размещается кассета 12 с рентгеновской пленкой. На контролируемом сварном шве изделия 11 размещен дефектометр 13. Само изделие 11 установлено на роликоопоры 14.Коллимационный узел 4 имеет три колли- мационных канала 15 - 17. Центральный коллимационный канал 15 имеет форму двух сопряженных вершинами конусов или пирамид. Боковые каналы 16 и 17 расположены симметрично относительно центрального канала 15.Блок источника работает следующим образом.Подсоединенный к ампулопроводу блок источника устанавливают на контролируемый шов изделия 11 и подают по указанному ампулопроводу...
Искробезопасный блок источника питания

Номер патента: 471465
Опубликовано: 25.05.1975
МПК: E21F 9/00
Метки: блок, искробезопасный, источника, питания
...обеспечивает отвод тепла от нагревающихся элементов за пределы корпуса. Для этого во внутреннюю полость теплонесущих элементов помещены тепло- отводящие стержни, торцовые поверхности которых жестко прикреплены к внутренней поверхности крышки при помощи кронштейна.На чертеже изображен предлагаемый искробезопасный блок источника питания.Он содержит взрывонепроницаемую оболочку 1, которая при помощи стяжных болтов 2 с передней стороны плотно закрыта крышкой 3. К крышке 3 с наружной стороны приварены ребра-охладители 4, а на внутренней стороне с помощью болтов 5 плотно крепится металлический каркас 6, в котором расположены металлические стержни 7 с намотанной на цпх фольгой 8 для плотной посадки резистора 9 5 по его внутреннему диаметру....
Предыдущий патент: Библиотека j
Следующий патент: Прибор для измерения концентрации ферромагнитных частиц в жидкостях или газах
Случайный патент: Поворотный затвор