Способ измерения относительного коэффициента демпфирования колебательной системы второгопорядка
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 248812
Автор: Кузовков
Текст
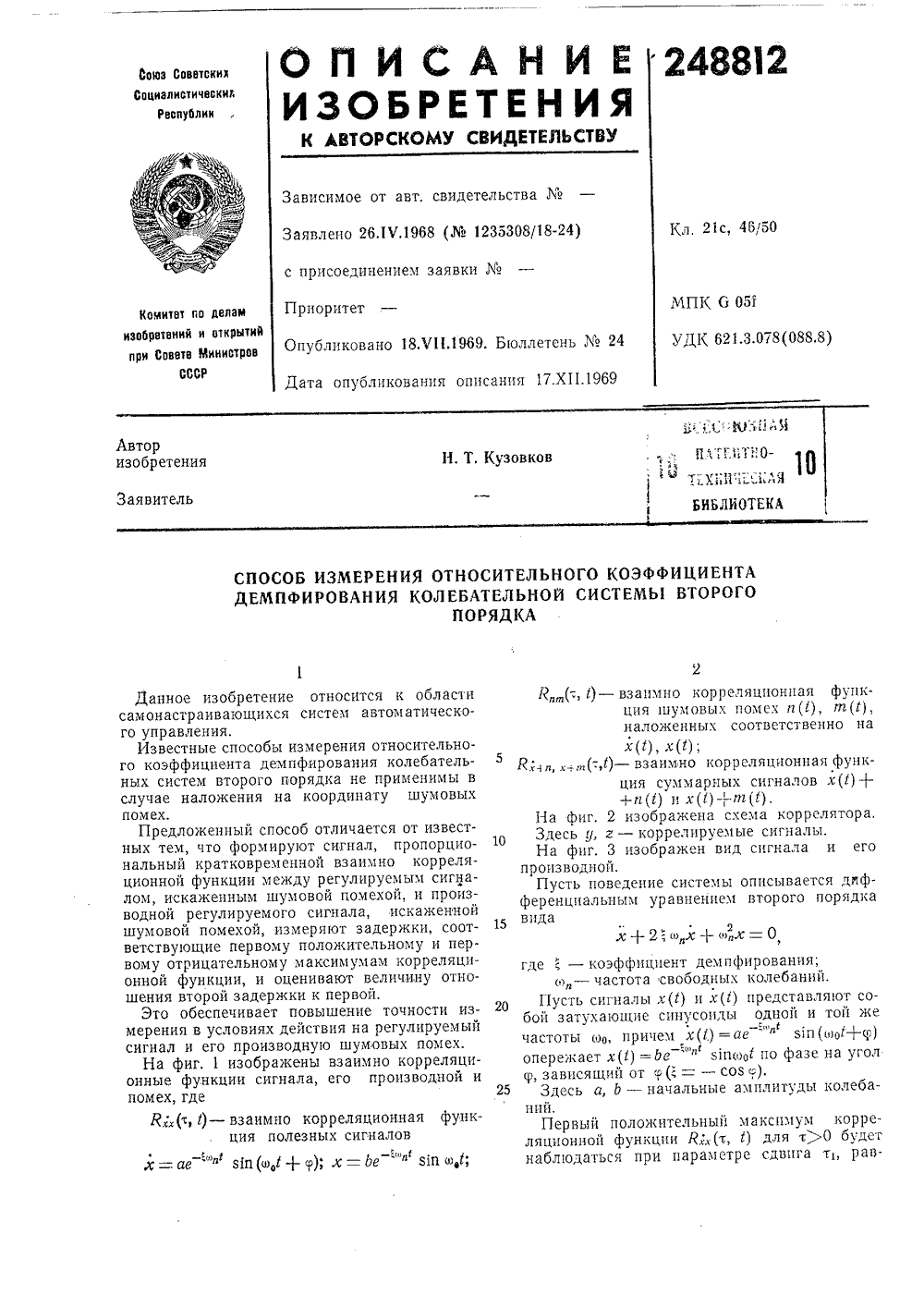
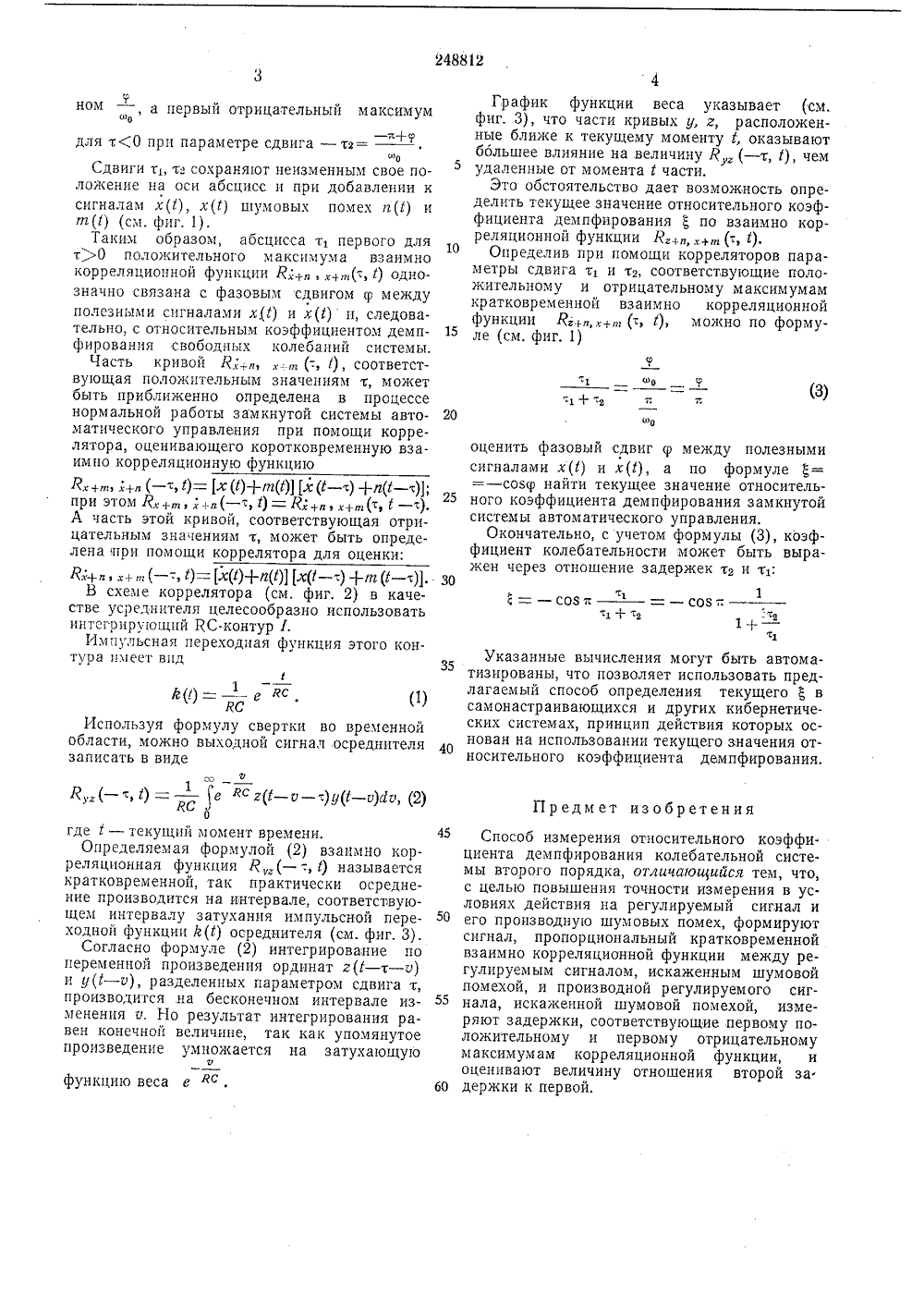
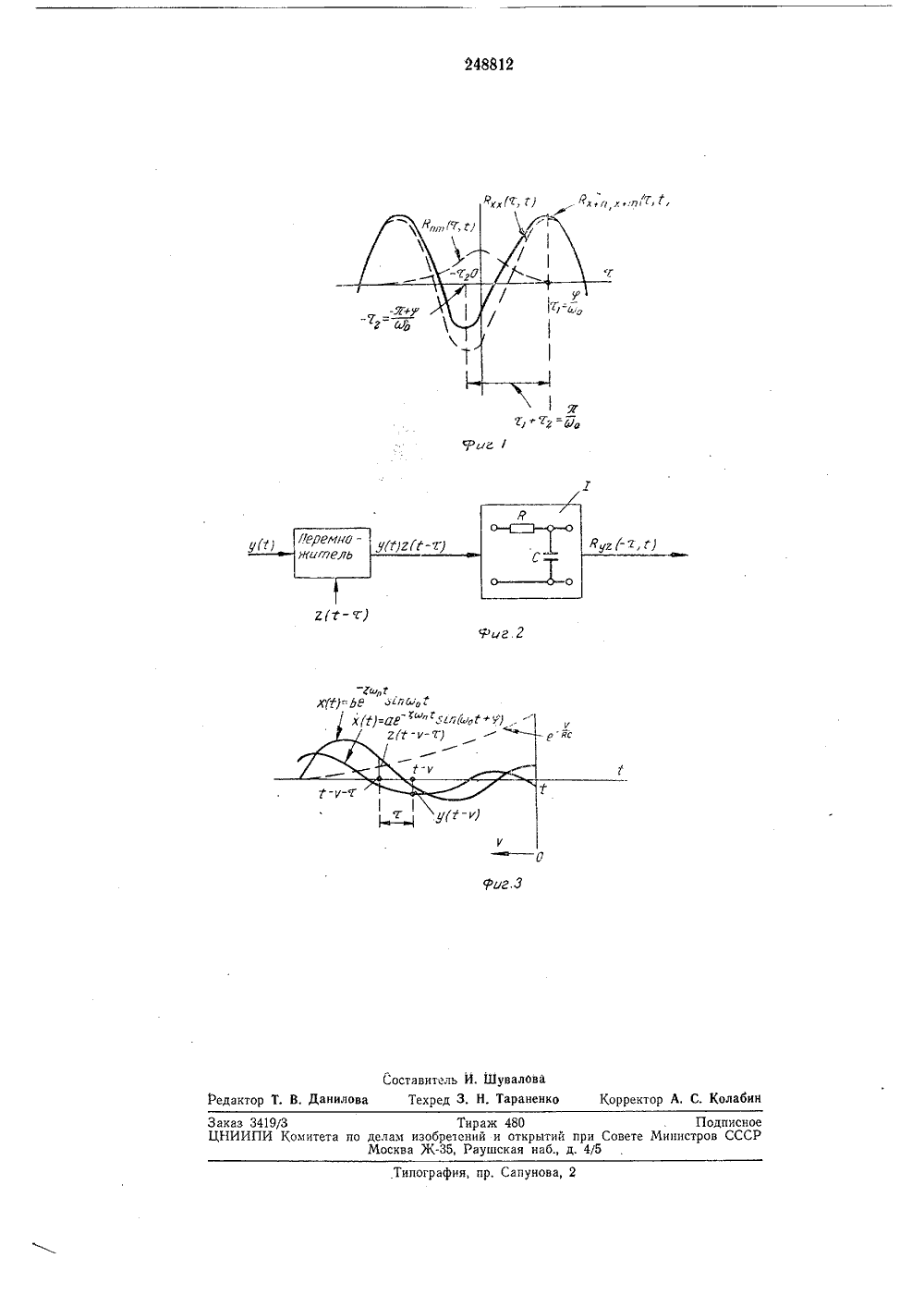
ОПИСАНИЕ ИЗОБРЕТЕН ИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУСова Советских Социалистических РеспубликЗависимое от авт. свидетельства35308/18-24 ч, 2 влено 26.17.1968 аявки 1 ч присоединение К 605 оритетбликовано 18 Х Комитет по делам изобретений и открытийУДК 621.3.078 (088.8 11.1969. Бюллетень2 гя описания 17.Х 11.1969 при Совете тйииистров СССРта опублико СПОСОБ ИЗМЕРЕНИЯ ОТНОСИТЕЛЬНОГО КОЭФФИЦИЕНТАДЕМПФИРОВАНИЯ КОЛЕБАТЕЛЬНОЙ СИСТЕМЫ ВТОРОГОПОРЯДКА тносистем+юх=О Данное изобретение о тся к области самонастраивающихся си автоматического управления,Известные способы измерения относительного коэффициента демпфирования колебательных систем второго порядка не применимы в случае наложения на координату шумовых помех.Предложенный способ отличается от известных тем, что формируют сигнал, пропорциональный кратковременной взаимно корреляционной функции между регулируемым сигналом, искаженным шумовой помехой, и производной регулируемого сигнала, искаженной шумовой помехой, измеряют задержки, соответствующие первому положительному и первому отрицательному максимумам корреляционной функции, и оценивают величину отношения второй задержки к первой.Это обеспечивает повышение точности измерения в условиях действия на регулируемый сигнал и его производную шумовых помех.На фиг. 1 изображены взаимно корреляционные функции сигнала, его производной и помех, гдеЯ;,(т, г) - взаимно корреляционная функция полезных сигналов,гс=.ае " з 1 п(в,1+); х=гге "и з 1 пю,1; 1(-, 1) - взаимно корреляционная функция шумовых помех гг(1), т(1),наложенных соответственно нах(г), хр),Ях- л, х- щ() Взаимно корреляционная функция суммарных сигналов х(1)++гг(1) и х(1)+ггг(г),На фиг, 2 изображена схема коррелятора.Здесь д, г - коррелируемые сигналы.На фиг. 3 изображен вид сигнала и егопроизводной.Пусть поведение системы описывается дифференциальным уравнением второго порядкавида где,: - коэффициент демпфирования;о - частота свободных колебаний.Пусть сигналы х(1) и х(1) представляют собой затухающие синусоиды одной и той же частоты ос, причем х(1) =ае " яп(ыо 1+р) опережает х(г) =бе" з 1 пк,1 по фазе на угол р, зависящип от ( = - сов ).25 Здесь а, Ь - начальные амплитуды колебании.Первый положительньш максимум корреляционной функции Я;(т, ) для т)0 будет наблюдаться при параметре сдвига т равном - , а первый отрицательный максимумоо- и+у для т(0 при параметре сдвига - т=ооСдвиги тт сохраняют неизменным свое по 5 ложение на оси абсцисс и при доба.влении к сигналам х, х(1) шумовых помех и(1) и т(1) (см. фиг. 1).Таким образом, абсцисса т, первого для т)О положительного максимума взаимно КОРРЕЛЯЦИОННой ФУНКЦИИ Яхпх+и(" ) ОДНО значно связана с фазовым сдвигом 1 между полезными сигналами х. и х и, следовательно, с относительным коэффициентом демп фирования свободных колебаний системы.ЧаСТЬ КрИВой Лхп х -и (1) СООТВЕТСТ вующая положительным значениям т, может быть приближенно определена в процессе нормальной работы замкнутой системы авто матического управления при помощи коррелятора, оценивающего коротковременную взаимно корреляционную функциюЛх, ( - , 1) = х (1)+т(1) Х (1 - ) +д(1 - о); ПрИ ЭТОМ Рх+тх - , и() - Их+их+т(О) А часть этой кривой, соответствующая отрицательным значениям т, может быть определена при помощи коррелятора для оценки: Й+и, х+ т ( - -, ) = Х+П Х( - ) +т ( - ) 30В схеме коррелятора (см. фиг. 2) в качестве усреднителя целесообразно использовать интегрирующий ЕС-контур У,Импульсная переходная функция этого контура имеет вид 35 Й = е .РСИспользуя формулу свертки во временной области, можно выходной сигнал осреднителя 40 записать в видеР,х( - о 1) = "е Яс г(1 - о - о)у(1 - о)ао, (2)1 о0где 1 - текущий момент времени, 45Определяемая формулой (2) взаимно корреляционная функция Я( - -, 1) называется кратковременноЙ, так практически осреднение производится на интервале, соответствующем интервалу затухания импульсной пере ходной функции Й(1) осреднителя (см. фиг. 3),Согласно формуле (2) интегрирование по переменной произведения ординат г( - т - о) и у(1 - о), разделенных параметром сдвига т, производигся на бесконечном интервале изменения о. Но результат интегрирования равен конечной величине, так как упомянутое произведение умножается на затухающую функцию веса е с. 60 График функции веса указывает (см.фиг. 3), что части кривых у, г, расположенные ближе к текущему моменту 1, оказывают большее влияние на величину Яух ( - т, 1), чем удаленные от момента 1 части.Это обстоятельство дает возможность определить текущее значение относительного коэффициента демпфированияпо взаимно корРЕЛЯЦИОННой ФУНКЦИИ Кх+и, х+т (" )Определив при помощи корреляторов параметры сдвига т и т 2, соответствующие положительному и отрицательному максимумам кратковременной взаимно корреляционной фуНКЦИИ Рх+п,х+и ( ) МОЖНО ПО фоРМУ- ле (см, фиг, 1)оо"1+ то х.оценить фазовый сдвиг ср между полезными сигналами х и х(1), а по формуле = - соз 1 найти текущее значение относительного коэффициента демпфирования замкнутой системы автоматического управления.Окончательно, с учетом формулы (3), коэффициент колебательности может быть выражен через отношение задержек т и т 1:1с: - СОЗ т = - СОЗУказанные вычисления могут быть автоматизированы, что позволяет использовать предлагаемый способ определения текущегов самонастраивающихся и других кибернетических системах, принцип действия которых основан на использовании текущего значения относительного коэффициента демпфирования.Предмет изобретенияСпособ измерения относительного коэффи. циента демпфирования колебательной системы второго порядка, отличающийся тем, что, с целью повышения точности измерения в условиях действия на регулируемый сигнал и его производную шумовых помех, формируют сигнал, пропорциональный кратковременной взаимно корреляционной функции между регулируемым сигналом, искаженным шумовой помехой, и производной регулируемого сигнала, искаженной шумовой помехой, измеряют задержки, соответствующие первому положительному и первому отрицательному максимумам корреляционной функции, и оценивают величину отношения второй за. держки к первой.248812 71- Г)и г . - .а,5 елг,аг.ЗСоставитель Й. Шувалова едактор Т. В. Данилова Техред 3, Н. Тараненко Корректор А, С. Колабин аказ 3419/3 Тираж 480 Подписное НИИПИ Комитета по делам изобретений и открытий при Совете Министров СССР Москва Ж, Раушская наб., д. 4/5 ография,апунова
СмотретьЗаявка
1235308
Н. Т. Кузовков
МПК / Метки
МПК: G05B 13/00
Метки: второгопорядка, демпфирования, колебательной, коэффициента, относительного, системы
Опубликовано: 01.01.1969
Код ссылки
<a href="https://patents.su/3-248812-sposob-izmereniya-otnositelnogo-koehfficienta-dempfirovaniya-kolebatelnojj-sistemy-vtorogoporyadka.html" target="_blank" rel="follow" title="База патентов СССР">Способ измерения относительного коэффициента демпфирования колебательной системы второгопорядка</a>
Устройство для определения абсциссы максимума взаимной корреляционной функции

Номер патента: 619922
Опубликовано: 15.08.1978
Автор: Никитин
МПК: G06F 15/34
Метки: абсциссы, взаимной, корреляционной, максимума, функции
...с входом блока 4 умножечия, выходы линии 3 соединены с остальными входами блока 4, выходы которого соединены со входами блока 5 интеграторов, выходы блока интеграторов соединены с блоком 6 поиска максимума модуля взаимной корреляционной функции, выход бло.ка поиска максимума соединен со входом блока 7 определения знака задержки по знаку ординаты максимума взаимной корреляционной функции, т.е. определяющего какой из сигналов задержан относительно другого.На входы устройства поступают исследуемые сигналы Х и у (1), представлщощие собой случайные шу)ловые процессы. Сумма сигналов подается на вход многоотводной линии 3 задержки, а их разность - на блок умножения. О Таким образом, эа;время накопленияв блоке 5 вычисляется функция Е Сигналы,...
Устройство для получения корреляционных функций оптических изображений

Номер патента: 195199
Опубликовано: 01.01.1967
Метки: изображений, корреляционных, оптических, функций
...электронно-оптического преобразователя, помещенного между исследуемым изобрякением и маской-диапозитивом,Это обеспечивает возможность оперативного визуального наблюдения корреляционных поверхностей ца экране осциллографическогоблока.Б с.схема устроиства показана на черте же.Исследуемое изображение 1 проектируется ца фотокатод эл ческого преобразователя (ЭОП) щи объектива 4 плоскость экр мсщается с плоскостью диапоз шедший через диапозитив свето дает ца фотоприсмник 6.Сдвиги изображения в элект ском преобразователе осущес взаимно перпендикулярплых напр помощи блока развертки 7.Выходной сигнал фотоприемн фотоумножителя, пропорционален значениям корреляционной функции для каждого полокения исследуемого изобракения ца экране ЭОП.5...
Корреляционная экстремальная система

Номер патента: 1260978
Опубликовано: 30.09.1986
Авторы: Верник, Красавцев, Никитин
МПК: G06G 7/19
Метки: корреляционная, экстремальная
...следующим образом.Для установки нуля при отсутствии сигналов х(С) или у(С) выставляют фазу сигнала на втором входе блока 14 (например, Ф 2-16) с помощью фазовращателя 15 таким образом, чтобы на аналоговом выходе блока 14 было минимальное напряжение.Далее исследуемые сигналы у(Т) и х(г.) поступают на информационные входы модуляторов 10 и 9, причем сигнал у(г.) непосредственно, а сигнал х(С) через блок 7 регулируемой задержки. При этом на выходах модуляторов 9 и 10 исследуемые сигналы присутствуют в качестве огибающих опорного напряжения генератора 8 (стандартный измерительный генератор, выбор которого определяется лишь необходимой опорной частотой, которая выбирается из известного условия, для генераторов типа Г 4-102-Р , , в 5 раз...
Устройство для подавления сетевой помехи в системах регистрации биопотенциалов

Номер патента: 1831322
Опубликовано: 30.07.1993
Авторы: Лебедев, Лебедева, Манеев
МПК: A61B 5/04
Метки: биопотенциалов, подавления, помехи, регистрации, сетевой, системах
...8, а следовательно, на его выходе и, тем самым, на втором входе сумматорайТ 3 кже формируется нулевой сигнал.По второму варианту исполнения БПП 5(фиг. 2 б) в исходном состоянии из-за обнуления запоминающего устройства 4 нулевой сигнал присутствует на втором входеперемножителя 9, на первсм входе которого сформирована новая константа 1 - К задатчиком 7 и сумматором 8. При этом на выходе перемножителя 9, образующем второй выход БИП 5. соответственно на втором входе сумматора 3 также формируется нулевой сигнал.В результате, в этот момент через сумматор 3 смесь сетевой помехи с помехой переходного процесса без какого-либо изменения в сумматоре 3 одновременно попадает на вход запоминающего устройства 4 и второй вход блока 5 подавления...
Способ измерения корреляционной функции неоднородного случайного поля

Номер патента: 284450
Опубликовано: 01.01.1970
Авторы: Пронин, Пронина, Соколов
Метки: корреляционной, неоднородного, поля, случайного, функции
...электроннолучевой трубки, основанный на суммировании электрических сигналов, пропорциональных парным произведениям опгических плотностей в точках диапозитива, отстоящих друг от друга на переменный шаг корреляции, отличающийся тем, что, с целью получения корреляционной функции, не зависящей от направления осей системы координат, относительно которой осуществляют развертывание изображения, координаты каждой пары точек формируют в виде случайных отклоняющих напряжений на пластины электроннолучевой трубки и ограничивают пределами контура объекта, .причем текущий шаг корреляции задают равным рассгоянию между точками каждой пары, высвечиваемыми на экране в масштабе диапозитива; сигналы, определяющие направление прямой линии, соединяющей...
Предыдущий патент: Соленоидный привод
Следующий патент: Бесконтактное двухпозиционное регулирующееустройство
Случайный патент: Подвижной график учета производства