Устройство для буксировки гибкой системы
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
(51 ЕТЕ СООЗ СОВЕТСКИХСОПИАЛИСТИЧЕСКИХ РЕСПУБЛИК ГОСУДАРСТВЕННОЕПАТЕНТНОЕведОмстВО сссР Госплтент сссРтОПИСАНИЕ ИЗО АВТОРСКОМУ СВИДЕТЕЛЬСТВУ щд, .8М(54) УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ГИБСВ"СТЕМЫ(57) Изобретение относится к авиационной технв частности к устройствам дпя управления пол нием гибких буксируемых систем. Цель изобретения - расширение эксплуатационных характеристик за счет обеспечения возможноси буксировки гибкой системы в заданном диапазоне ее угпового положения от вертикальной плоскости. В нижней части гибкой системы закреппены несущие модули с размещенными на них механизмами отклонения буксируемой системы, выполненными в виде двигатепей с воздушными винтами, создающими тягу в поперечном направпении и откпоняющими гибкую систему от вертикальной ппоскости. 3 ил.Изобретение относится к авиационной технике, в частности к устройствам для управления положением плоских гибких буксируемых систем.Цель изобретения - расширение эксплуатационных характеристик за счет обеспечения возможности буксировки гибкой системы в заданном диапазоне ее углового положения от вертикальной плоскости,На фиг.1 изображен общий вид устройства; на фиг,2 - вид А на фиг.1; на фиг,З - конструкция блока управления механизмами отклонения гибкой системы.Устройство для буксировки гибкой системы 1 содержит буксирный строп 2, соединенный с буксировщиком 3, механизм 4 отклонения гибкой системы 1 и блок 5 управления ее положением, Устройство снаб. жено несущими модулями. 6, 7, стабилизатором 8 гибкой системы по направлению потока, механизмом 9 отклонения буксируемой системы 1 и гибкой связью 10. Буксируемая гибкая система 1 имеет прямоугольную форму, в Ее нижней части в углах 11, 12 закреплены несущие модули 6, 7 с размещенными на каждом из них механизмами 4 и 9 отклонения гибкой системы 1, а верхний угол 13 гибкой системы 1 закреплен на буксирном стропе 2, верхний угол 14 гибкой системы 1 связан со стабилизатором 8 и с одним концом гибкой связи 10, другой конец которой закреплен на буксировщике 3. Блок 5 управления гибкой системой 1 имеет датчики 15, 16 положения гибкой системы 1, размещенные на несущих модулях 6, 7 и индикаторы 17, 18 положения гибкой системы 1, размещенные на,буксировщике 3, входы которых связаны с выходами датчиков 15, 16 положения гибкой системы 1, блок 19 регулирования боковой силы механизмом 4 и 9 отклонения гибкой системы 1.Механизмы 4 и 9 отклонения гибкой системы 1 выполнены в виде двигателей 20, 21, например, двигателей постоянного тока, с двумя выходными валами (или с редуктором), оси которыхрасположены в поперечной плоскости несущих модулей 6, 7 и на которых с двух сторон закреплены воздушные винты 22 и 23, создающие тягу в поперечном направлении. Блок 19 регулирования боковой силымеханизмов отклонения гибкой системы 1может быть выполнен, например, в виде потенциометров 26, 27, регулирующих напря 5 жение на обмотках двигателей 20; 21механизмов 4, 9. Штоки потенциометров 26,27 связаны с ручкой 28 их синхронного перемещения, Для изменения направлениявращения двигателей 20, 21, и соответст 10 венно, изменения направления действиябоковой силы предусмотрен переключатель,29.Устройство работает следующим образом,15 При буксировке гибкой системы 1 буксировщиком 3 для ее отклонения в поперечнойплоскости перемещают ручку 28 синхронного перемещения штоков потенциометров26,27 блока 5 управления гибкой системой20 1, подавая тем самым напряжение на двигатели 20, 21 механизмов 4, 9 отклонения гибкой системы 1. Двигатели 20, 21 приводят вовращение воздушные винты 22, 23, создающие боковую силу приложенную к углам 11,12 гибкой системы 1. Под действием боковой силы несущие модули 6, 7 отклоняютгибкую систему 1 от вертикального положения в ту или иную сторону в зависимости отнаправления вращения воздушных винтов30 22, 23. По индикаторам 17, 18 определяетсятекущая величина отклонения гибкой системы 1, и при достижении требуемого углаотклонения гибкой системы 1 с помощьюручки 28.синхронного перемещения под 35 держивается заданное значение напряжения на двигателях 20, 21. Для ооеспеченияплоской формы гибкой системы 1 вдоль направления потока к ее углам 12 и 14 прикладываются усилия от стабилизатора 8 и40 несущего модуля 7, пропорциональные силам их лобовых сопротивлений, а в вертикальном направлении плоская формаобеспечивается благодаря наличию усилийот буксирного стропа 2 и гибкой связи 10 и45 веса несущих модулей 6, 7.(56) Авторское свидетельство СССР М 1067741, кл. В 63 6 13/00, 1980.50 Авторское свидетельство СССРМ 1727326, кл, В 64 О 3/00, 25.11,88.1797238 Формула изобретения Составитель Техред М., Шевц ргентал ктор Т, Иванова оРРектор В, Петраш Тираж Подписно НПО "Поиск" Роспатента035, Москва, Ж, Раушская наб., 4/5 Заказ 35 одственно-издательский комбинат "Патент", г. Ужгород, ул,Гагарина, 101 Про УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ГИБКОЙ СИСТЕМЫ, содержащее буксировщик, связанный через буксирный строп с размещенным в нижней части гибкой системы у ее передней кромки несущим модулем, гибкую связь, одним концом закрепленную на буксировщике, а другим связанную с верхним углом гибкой системы у ее задней кромки и со стабилизатором гибкой системы, несущий модуль, закрепленный в нижней части гибкой системы у ее задней кромки, отличающееся тем, что, с целью расширения эксплуэтационных характеристик за счет обеспечения возможности буксировки гибкой системы в заданном диапазоне ее углового отклонения от вертикальной плоскости, она снабжено блоком управления положением гибкой системы, размещенным на буксировщике, расположенными на несущих модулях датчиками углового положения гибкой системы и механизмами отклонения гибкой системы, причем датчики углового положения гибкой системы и механизмы отклонения гибкой системы связаны между собой через блок управления положением гибкой системы, а буксирный строп связан с передней кромкой гибкой системы в ее нижней и верхней частях.Ы 4
СмотретьЗаявка
4628757/23, 29.12.1988
Научно-производственное объединение "Взлет"
Абашин А. А, Мутилин Н. А, Салахов М. А, Балабанов В. В
МПК / Метки
МПК: B64D 3/00
Метки: буксировки, гибкой, системы
Опубликовано: 15.01.1994
Код ссылки
<a href="https://patents.su/3-1797238-ustrojjstvo-dlya-buksirovki-gibkojj-sistemy.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для буксировки гибкой системы</a>
Устройство для буксировки гибкой системы

Номер патента: 1785183
Опубликовано: 15.12.1993
Авторы: Абашин, Балабанов, Мутилин, Салахов
МПК: B64D 3/00
Метки: буксировки, гибкой, системы
...корпусу38 прикреплены две другие стабилизирую- тросу 30 сигнал на управляющие обмотки щие поверхности 8. двигатели 19, который через коническую паПередача сигнала с борта буксировщи-, ру 20, червяк 21, венец 22, вал 23, редуктор ка 11 на управение механизмом 15 измене, вал 25, ведущий ролик 26 поворачивает ния положания гибкой системы в 5 основание 4 в опорных роликах 18 внутри вертикально плоскости и обратно на борт дополнительного поворотного основания с датчика 16 положения гибкой системы в 14. Одновременно с поворотом основания 4 вертикальной плоскости на индикатор 17 ее через измерительный ролик 40 поворачиваположения может осуществляться по ради- ется шток 41 датчика 12 положения гибкой оканалу или кабель-тросу 39. 10 системы в...
Управляющее устройство для системы регулирования углового положения объекта
Номер патента: 1578697
Опубликовано: 15.07.1990
Автор: Судариков
МПК: G05B 15/02
Метки: объекта, положения, системы, углового, управляющее
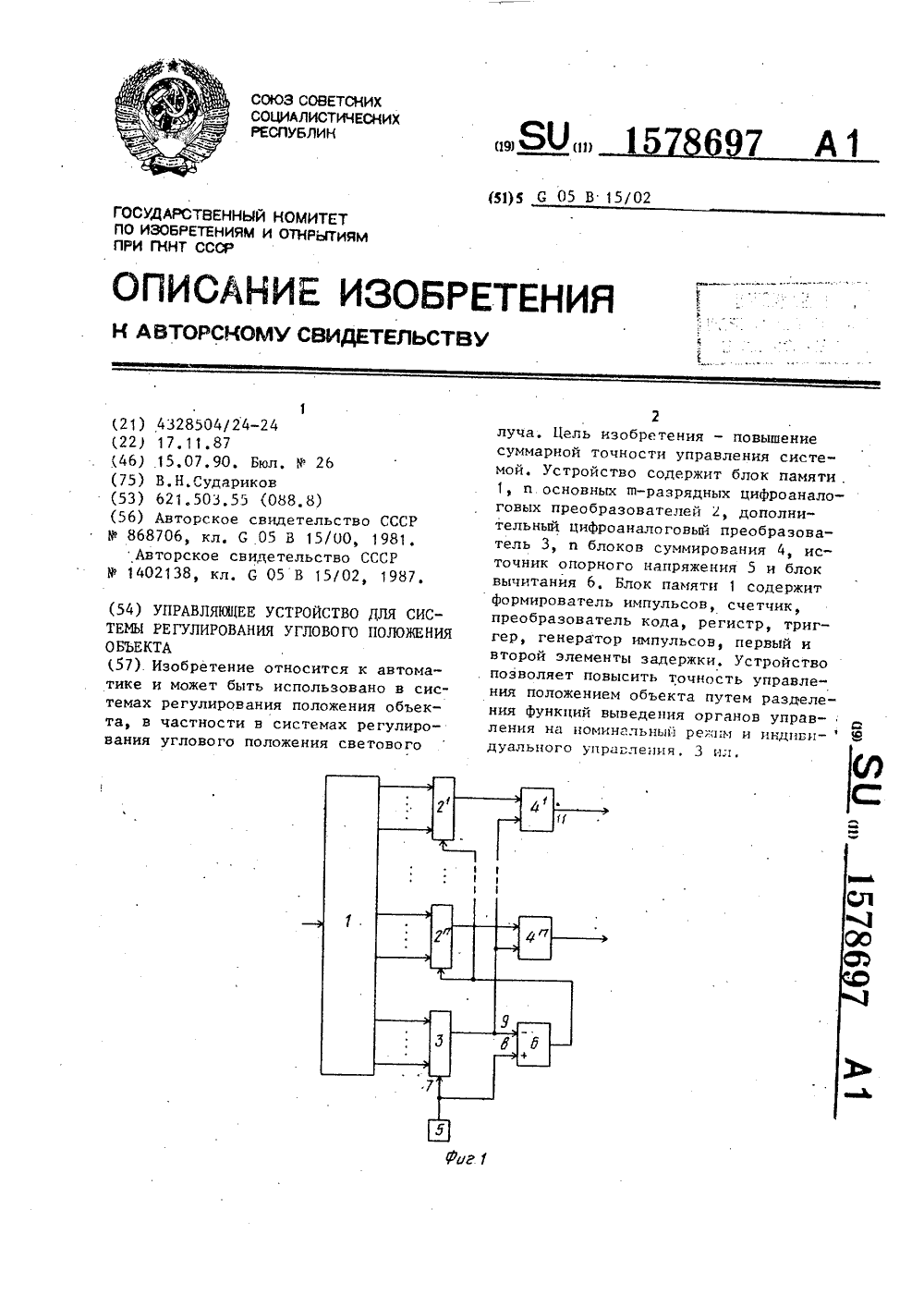
...уменьшаться (фиг,Зл),По мере дальнейшего поступленияимпульсов генератора 17 блок памяти1 работает аналогичным образом, вос-.производя на своих выходах 1 О программу эксперимента, записанную в егопостоянное запоминающее устройство 14.При достижении напряжением на выходе блока суммирования 4 предусмотренногопрограммой уровня И и фиг.Зи,Зк), соответствующего выходу внешнихрегулирующих органов из зоны нечувствительности на номинальной рабочийрежим, программное изменение числа навыходах 10 " блока памяти 1 прекращается, вследствие чего напряжениена выходе дополнительного цифроаналогового преобразователя 3 фиг,Зз) исоответственно на выходе блока вычитания 6 (фиг,Зл), стабилизируется,а дальнейшее управление внешними орга-нами...
Литниковая система для отливки тонкостенных деталей в кокиль с вертикальной плоскостью разъема

Номер патента: 554066
Опубликовано: 15.04.1977
Авторы: Бейзер, Вайнер, Гайдуков, Мирошниченко, Слободчиков
МПК: B22C 9/08, B22D 15/00
Метки: вертикальной, кокиль, литниковая, отливки, плоскостью, разъема, тонкостенных
...деталей. Это достигается тем,что в кокиле с вертикальной плоскостью разъема выпор выполнен в виде Ч-образного сквозного канала, ветви которого сходятся в верхней части кобиля, при этом конец одной 10 из ветвей расположен над формообразующейполостью, а конец другой ветви - под ней,На фиг. 1 показан кокиль; на фиг. 2 -то же, разрез по А - А на фиг. 1.Кокиль с вертикальной плоскостью разъе ма состоит из полукокилей 1 и 2 с примкнутыми коробками охлаждения 3 для равномерного охлаждения частей кокиля и системы толкателей 4. Полукокиль 1 выполняет отливку 5, питатель 6 и выпор 7 в виде Ч-об разного канала из двух ветвей 8 и 9. Ветвь 8направлена вверх на одном уровне с чашей 10 для выхода воздуха, а другая ветвь 9 направлена вниз ,под отливку...
Устройство для буксировки гибкой системы

Номер патента: 1663888
Опубликовано: 30.12.1993
Авторы: Абашин, Балабанов, Мутилин, Салахов
МПК: B64D 3/00
Метки: буксировки, гибкой, системы
...с борта буксировщика 1 по радиоканалу с помощью передатчика 38 команд и передающей антенны 39, а на носовой части 13 несущего модуля 4 установлена приемная антенна 40 и приемник 41 команд, причем включение схемы управления положением гибкой системы осуществляется подачей напряжения на электромагнитную муфту 28 и подключением выходного сигнала датчика 10 угла сноса гибкой системы ко входу блока 11 управления положением гибкой системы, например, через контакты реле 42.Передача сигнала на включение схемы управления положением гибкой системы может осуществляться и по кабель - тросу, Для исключения влияния магнитных свойств материала на характеристики гибкой системы крыло и оперения могут быть выполнены из диэлектрического материала. Также...
Устройство для буксировки гибкой системы
Номер патента: 1753669
Опубликовано: 15.01.1994
Авторы: Абашин, Балабанов, Кирилин, Мутилин, Салахов
МПК: B64D 3/00
Метки: буксировки, гибкой, системы
УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ГИБКОЙ СИСТЕМЫ, содержащее связанные с буксировщиком через кабель-тросы стабилизаторы гибкой системы с размещенными на них механизмами ориентации гибкой системы в поперечной плоскости, выполненными в виде силовых установок, состоящих из двигателей и тянущих воздушных винтов, оси которых расположены в горизонтальной плоскости перпендикулярно потоку, отличающееся тем, что, с целью расширения эксплуатационных возможностей за счет обеспечения буксировки плоской гибкой системы перпендикулярно направлению потока, оно снабжено закрепленными в углах гибкой системы на ее нижней кромке дополнительными стабилизаторами гибкой системы, размещенными на них дополнительными механизмами ориентации гибкой системы в поперечной...
Предыдущий патент: Установка для подъема полезных ископаемых со дна океана
Следующий патент: Устройство для буксировки тел
Случайный патент: Устройство для раскладки потока корпусов конфет в ряды