Система управления электроприводом робота
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1474585
Авторы: Кузнецов, Овод-Марчук, Титов, Фурман



Текст
.801474585 1)4 С 05 В 11/О ОПИСАНИЕ ИЗОБРЕ ,Н АВТОРСКОМУ СВИДЕТЕЛЬСТВУ омабытьменизГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР(56) Авторское свидетельство ССУ 521551, кл. С 05 В 13/02, 197Кгйсе 1 я И. 3., Ваг 1 саз Я. К,Оевхдп оЕ гасЕхпя яуяешя зцЬ 1го асСиагог загигаг 1 оп апс 1п ге 8 гаг ог. юпй-ир, - 1 пг . Л. С1984, ч. 39, Р 4, р. 667-682,(54) СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОВОДОМ РОБОТА(57) Изобретение относится к автическому регулированию и можетприменено для управления электрханическими исполнительными мех мами промышленных роботов, станков с числовым программным управлением. Цель изобретения - повышение динамической точности и расширение области применения системы за счет уменьшения эффекта колебательности переходных процессов. Инвертор 1 О, коммутатор 11 и пороговое устройство 12 позволяют подключить к входу интегратора 3 либо выход первого элемента сравнения 1, если сигнал 2 на выходе второго усилителя 6 удовлетворяет условию 2Упор, либо выход инвертора 10, если Х удовлетворяет усло-вию 123 Упор . Таким образом,в выходной сигнал второго усилителя 6 с вносится фазовое опережение, оказывающее демпфирующее действие на характер переходного процесса, 2 ил.Изобретение относится к автоматическому регулированию и можетбыть применено для управления элекФтромеханическими исполнительнымимеханизмами промышленных роботов,станков с числовым программным управлением.Цель изобретения в . повышение динамической точности и расширение области применения системы,На фиг.1 представлена структурнаясхема предлагаемой системы управления электроприводом робота, нафиг.2 - временные диаграммы, поясняющие работу блоков системы при линейно изменяющемся входном воздействии.Система содержит первый элемент 1сравнения, первый усилитель 2, интегратор 3, сумматор 4, второй элемент5 сравнения, второй усилитель б,двигатель 7, датчик 8 скорости, датчик 9 положения, инвертор 10, коммутатор 11 и пороговое устройство 12,Система работает следующим образом.Пусть к моменту времени й(фиг, 2)система находилась в статическом состоянии, причем величины сигналов на выходе интегратора 3 и второго усилителя б равны нулю. В момент времени 1 на вход системы подается линейно возрастающий сигнал, и на выходе первого элемента 1, сравнения появляется сигнал ошибки Е. Посколькувыходной сигнал второго усилите 35ля б удовлетворяет условиюЕПпорошибка Я подается черезпервый вход коммутатора 11 на входинтегратора 3, При этом сигнал с40выхода сумматора 4, равный У = К Р++ К К Й 1, сравнивается во втором1элементе 5 сравнения с сигналомдатчика 8 скорости, и их разностьчерез второй усилитель б поступаетна вход двигателя 7, обеспечиваяего вращение в нужном направлении.Увеличение сигнала ошибки Г приведетк тому, что в некоторый момент времени 1 модуль выходного сигнала Евторого усилителя б превысит заданное значение Б ,р,и пороговое устройство 12 выработает управляющий сигнал а = 1, который подключает на выход коммутатора 11 сигнал ошибки Е55с обратным знаком, не позволяющийинтегратору 3 войти в насыщение. Выходной сигнал интегратора 3 уменьшается, благодаря чему выходной сигнал Е второго усилителя б с некоторогомомента времени йетакже начи"нает понижаться, Снижение уровня сиг"нала Е до величины Е/ ( Б р в момент времени 1 приведет к тому,что на выходе порогового устройства12 появится управляющий сигнала = О, выход коммутатора 11 переклю"чится на его первый вход, и сигналошибки Е начинает. поступать непосредственно на вход интегратора 3.В последующие моменты времени ошибка Е уменьшается до нуля, и система входит в установившийся режимработы, при котором модуль сигналаЕ не превышает уровня П Ор, а навыходе интегратора 3 устанавливаетсянекоторая постоянная величина, совпадающая по знаку с сигналом Е.Таким образом, инвертор 10, коммутатор 11 и пороговое устройство 12в момент времени С подключает входинтегратора 3 через инвертор 10 квыходу первого элемента 1 сравнения,внося, таким образом, фазовое опережение в выходной сигнал Е. Упреждающее понижение выходного сигналаинтегратора 3 вызывает в момент времени Йснижение сигнала Е при дальнейшем увеличении сигнала ошибки Е,что оказывает демпфирующее действиена характер переходного процесса. Вреальной системе установка Б по выбирается такой, чтобы при линейноизменяющемся входном воздействии переходный процесс заканчивался заминимальное время при отсутствии колебательности,Формула изобретенияСистема управления злектроприводом робота, содержащая последовательно соединенные первый элемент сравнения, первый усилитель, сумматор, второй элемент сравнения, второй усилитель, двигатель, на выходе которо" го установлены датчик положения и датчик скорости, соединенные соответственно с вторыми входами первого и второго элемента сравнения, второй вход сумматора соединен с выходом интегратора, о т л и ч а ю щ а я с я тем, что, с целью повышения динамической точности и расширения области применения системы, в нее введены коммутатор, пороговое устройство и инвертор, вход которого соединен1474585 Составитель Г.НефедоваРедактор Н.Рогунич Техред Л,Сердюкова Коррек Муск Подпис н 91/44 Тираж 788осударственного комитета по изобретениям и от 113035,. Москва, Ж, Раушская наб ЗаказВНИИПИ тиям.при ГКНТ ССС оизводственно-издательский комбинат "Патент", г.ужгород, ул, Гагарина,с выходом первого элемента сравненияи первым входом коммутатора, а выходсоединен с вторым входом коммутатора, выход второго усилителя через пороговое устройство подключен куправляющему входу коммутатора, выход которого соединен с входом интегратора.
СмотретьЗаявка
4277294, 06.07.1987
МИНСКИЙ РАДИОТЕХНИЧЕСКИЙ ИНСТИТУТ, ПРЕДПРИЯТИЕ ПЯ А-7070
КУЗНЕЦОВ ВЛАДИМИР ПЕТРОВИЧ, ФУРМАН ФЕДОР ВАСИЛЬЕВИЧ, ТИТОВ МИХАИЛ АНАТОЛЬЕВИЧ, ОВОД-МАРЧУК ГРИГОРИЙ ВАСИЛЬЕВИЧ
МПК / Метки
МПК: G05B 11/00
Метки: робота, электроприводом
Опубликовано: 23.04.1989
Код ссылки
<a href="https://patents.su/3-1474585-sistema-upravleniya-ehlektroprivodom-robota.html" target="_blank" rel="follow" title="База патентов СССР">Система управления электроприводом робота</a>
Преобразователь скорости изменения аналогового сигнала во временной интервал

Номер патента: 902252
Опубликовано: 30.01.1982
Авторы: Богданов, Долгин, Замятин
МПК: H03K 13/20
Метки: аналогового, временной, изменения, интервал, сигнала, скорости
...скорости измерения аналогового сигнала во временной интервал; на фиг.2 - временная%блок 5 выделения разности временныхинтервалов. Преобразование осуществляется в два такта, начало первоготакта характеризуется достижениемнапряжения второго интегратора значения, меньше входного на величинугистерезиса элемента сравнения.Моменты начала первого такта на раз,личных шагах преобразования (фиг.2)1 отмечены Сд С , , йщ. В эти 1%моменты элемент сравнения воздействует на переключатель 2 и изменяетполярность. напряжения на его выходетаким образом, чтобы развертывающеенапряжение на выходе второго интегратора возрастало по квадратичномузакону до значения, превышающегоисслеруеььй сигнал на величину гистерезиса элемента сравнения. Выполнение...
Преобразователь скорости изменения аналогового сигнала во временной интервал

Номер патента: 688987
Опубликовано: 30.09.1979
МПК: H03K 13/20
Метки: аналогового, временной, изменения, интервал, сигнала, скорости
...2 биполярных сигналов, вход которого подключен к выходу сравццвающегоустройства 1, а выход через интегратор 3соединен с вторым входом сравнивающегоустройства 1, к выходу последнего подклю 25 чсцо устройство 4 выделптеля разностивременных интервалов.Работает преобразователь следующимобразом,В момент времениначала п-го цикла.о преобразования сигнал на выходе цнтеграу АУ(3) Составитель В, ДмитриевРедактор Е. Караулова Техред А. Галахова Корректор Е. Осипова Заказ 2353/9 Изд,579 Тираж 1060 ПодписноеНПО Поиск Государственного комитета СССР по делам изобре;сний и открытий113035, Москва Ж, Раушская наб., д. 4/5 Типография, пр. Сапунова, 2 тора 3 принимает значение, меньшее вход. ного на величину гистерезиса сравнивающего устройства 1, При этом...
Преобразователь напряжения в интервал времени

Номер патента: 1042175
Опубликовано: 15.09.1983
Авторы: Андреев, Островский, Рыжевский, Фролов
МПК: H03K 13/20
...к выходу генератора тактовых импульсов, выход триггера соединен с входом устройства сброса и управляющим входом переключателя, выход устройства сброса соединен с входом сброс второго интегратора, входы коммутатора соединены с выходами источника образцового напряжения, а выход соединен с входом переключателя, управляющие входы коммутатора подсоединены к выходу генератора тактовых импульсов и к выходу анализатора знака, вход которого соединен с выходом первого интегратора 1.1Недостатком устройства является низкая точность преобразования.,Цель изобретения - повышение точности преобразования.Поставленная цель достигается тем, что в преобразователь напряжения в интервал времени, содержащий . два интегратора, устройство сравнения,...
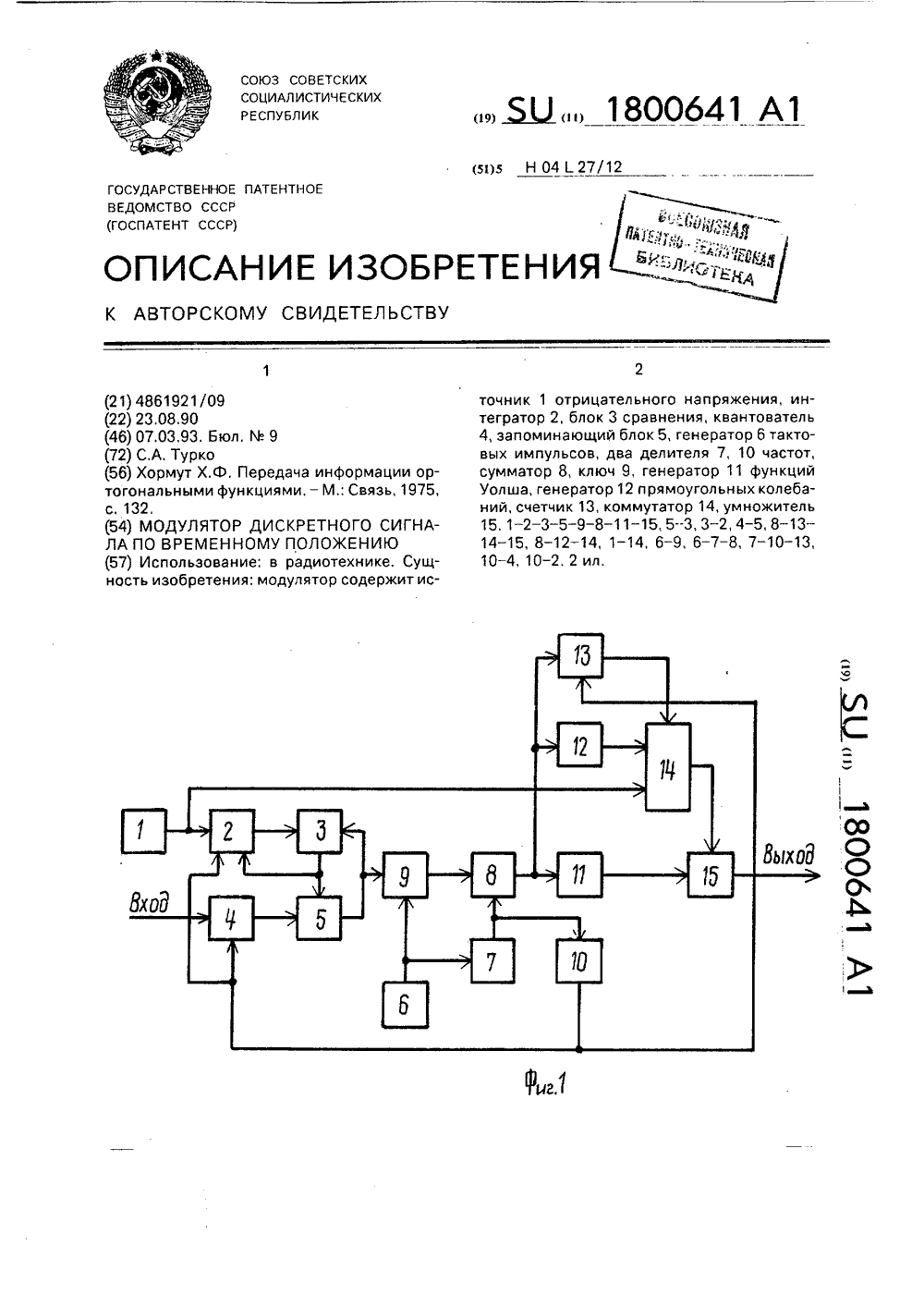
Модулятор дискретного сигнала по временному положению
Номер патента: 1800641
Опубликовано: 07.03.1993
Автор: Турко
МПК: H04L 27/12
Метки: временному, дискретного, модулятор, положению, сигнала
...Уолша. Если значение квантованного напряжения равно 2, то фазовый сдвиг осуществляется на два элемента функции Уолша и т, д. (фиг, 2, к).Делитель 10 частоты образует из последовательности импульсов с выхода делителя 7 частоты импульсы, которые запускают схему квантователя 4 в моменты времени О, О, 2 О(фиг. 2 к), Эти же импульсы поступают на второй вход начала интегрирования интегратора 2 и запускают его в работу, а также на второй вход установки счетчика 13 в нулевое состояние и сбрасывают его в нуль.Последовательность импульсов, поступающая на вход генератора 11 функций Уолша поступает также на входы генератора 12 прямоугольных колебаний и на вход счетчика 13. Таким образом, при поступлении первых 2"импульсов с выхода сумматора 8...
Преобразователь аналовоггового сигнала во временной интервал

Номер патента: 552694
Опубликовано: 30.03.1977
Авторы: Мальцев, Сластенко, Чернй
МПК: H03K 13/20
Метки: аналовоггового, временной, интервал, сигнала
...то преобразователь не отрабатывает этого изменения входного сигнала.Целью изобретения является повышение точности преобразования.Поставленная цель достигается тем, что в преобразователе аналогового сигнала во временный интервал, содержащем входной переключатель, первый вход которого подключен к Е- т 1")М 2694пропорциональным величине входного напряжения в момент окончания первого цикла.По команде блока 3 входной переключатель 1 подключает на вход элемента сравнения 2 входной сигнал. Триггер 8 по этому сигналу не переключается. Элемент сравнения 2 работает так, что при входных сигналах У)У, 1 где У, - напряжение на выходе интегратора 4; У - входное напряжение) ключ 7 подключает выход элемента сравнения 2 через суммирующий резистор 6...
Предыдущий патент: Устройство коммутации в цепях переменного и пульсирующего напряжения
Следующий патент: Следящая система
Случайный патент: Способ получения антистатических полимерных материалов