Система управления гайковертом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
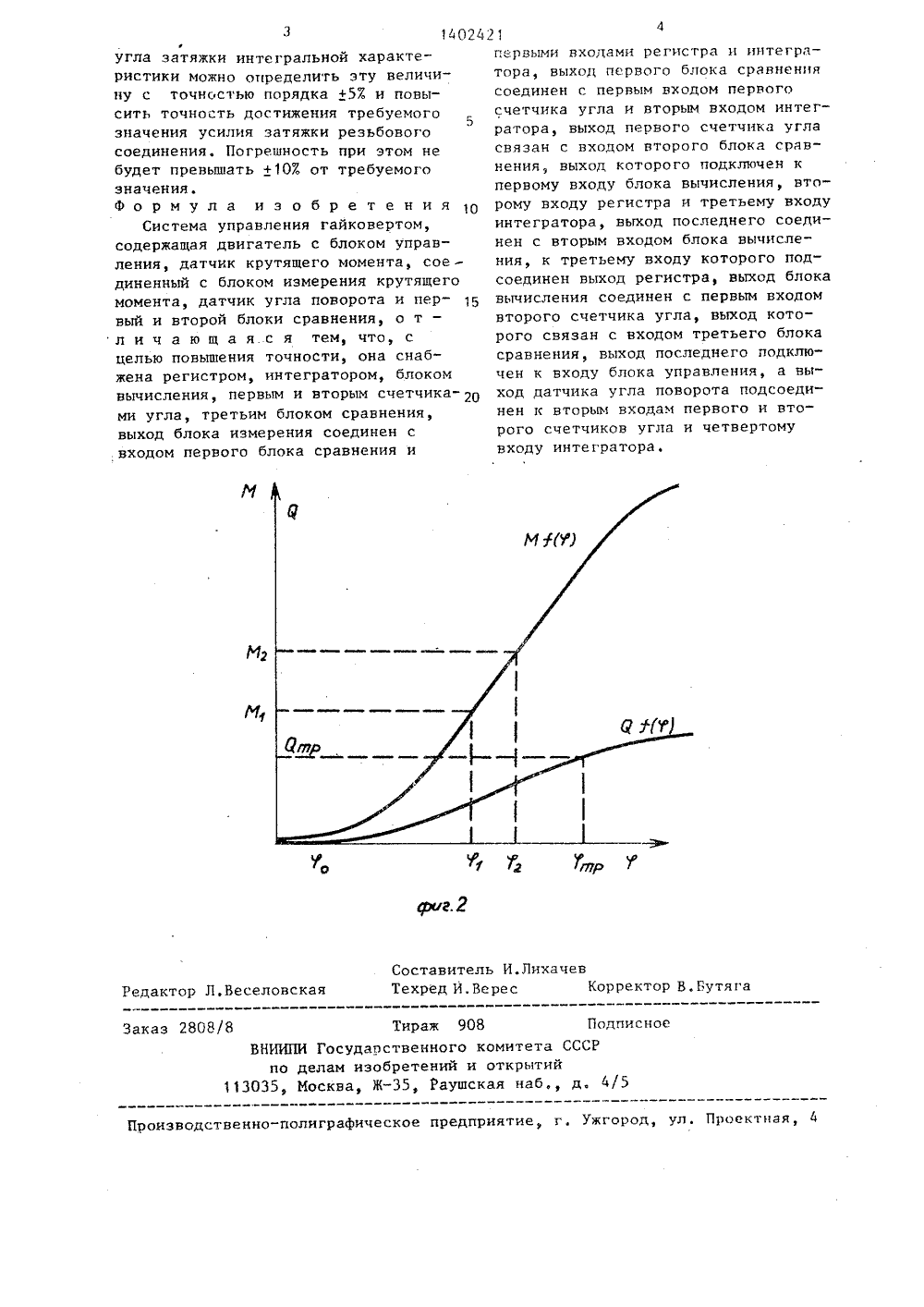
(21) 4139 (22) 28. 1 (46) 15.0 (71) К йб 242/25-280,866.88, Бюл. Уу ышевский политут им. В.В.КуйбВ.А.Николаев и А621.883(088.8)Патент СССР 11 1В 23 Р 19/06, 19стивов В.В Чания затяжки резьбниэация и автоматва, 1984, Р 2. еский тех ьппева(72 (53 к 50554,2.в В.И.вых соизация дине прои усил Меха дс 4 йь Ю ГОСУДАРСТВЕННЮ НОМИТЕТ ССС пО делАм изОБРетений и ОтнРыт ТОРСНОМУ СВИД:Т(54) СИСТЕМА УПРАВЛЕНИЯ ГАЙКОВЕРТОМ(57) Изобретение относится к машиностроению, а именно к системам управления гайковертами, и может быть использовано в любой отрасли промышленности при сборке реэьбовых соединений. Целью изобретения является повышение точности. Система управлениягайковертом содержит двигатель 1 сблоком управления 2, датчик 3 крутящего момента, блок 4 измерения последнего, первый блок 5 сравнения,регистр 6, интегратор 7, первый счет 02421 д чик 8 угла поворота, второй блок 9сравнения, блок 10 вычисления, второсчетчик 11 угла поворота, третийблок 12 сравнения и датчик 13 углаповорота. Датчик 3 крутящего моментасоединен с входом блока 4 измеренияпоследнего. Ци 41 ровой код, пропорциональный измеренному значению крутящего момента, поступает на вход первого блока 5 сравнения. Выход блока4 измерения крутящего момента соединен с первыми входами регистра 6 иинтегратора 7, После включения блока2 управления на двигатель 1 подаетсянапряжение, соответствующее скоростивращения двигателя для приведенияво вращение гайки резьбового соединения. Датчик 3 крутящего моментаконтролирует значение крутящего момента, приложенного к гайке, а блок4 измерения крутящего момента преобразует сигнал датчика 3 в цифровойкод. Блок 1 О вычисления через интервал времени выдает на вход предварительной установки счетчик 11 угла поворота вычисленное значение углазатяжки, 2 ил.Изобретение относится к мяшиностроешлю, я именно к системам управления гайковертами, и может бытьиспользовано в любой отрасли промышленности при сборке реэьбовых соединенийЦелью изобретения является повышение точности путем интегральной оценки угла поворота гайки резьбовогосоединения.На фиг. 1 изображена функциональная схема системы управления гайковертом; на фиг. 2 - зависимость крутящего момента М на ключе и усилиязатяжки Я от угла ц затяжки гайкирезьбового соединения,Система управления гайковертом содержит двигатель 1 с блоком 2 управления, датчик 3 крутящего моментаблок 4 измерения последнего, первыйблок 5 сравнения, регистр 6, интегратор 7, первый счетчик 8 угпа поворота, второй блок 9 сравнения блок 10вычисления, второй счетчик 11 углаповорота третий блок 12 сравненияи датчик 13 угла поворота,Датчик 3 крутящего момента соединен с входом блока 4 измерения последнего, Цифровой код, пропорциональный измеренному значению крутящегомомента, поступает на вход первогоблока 5 сравнения Выход блока 4 измерения крутящего момента соединенс первыми входами регистра 6 и интегГратором 7, НЯ второй вход первогоблока 5 сравнения подается двоичныйкод, соответствующий значению момента И,. Выход блока 5 сравнения подключен к первому входу первого счет 40чика 8 угла поворота и второму входуинтегратора 7. Выход первого счетчика.8 угла поворота соединен с входомв" орогс блока 9 сравнения, на другойвход которого подается код, соот"ветствующий зя,анному приращению угла до поворота. Выход второго блока9 сравнения подключен к первому входу блока 10 вычисления, второму входурегистра 6 л третьему входу интегратора 7, выход которого соединен гвторым входом блока 10 вычисления. 1;третьему входу блоха 10 вычисленияподсоединен выход регистра , Выходблока 10 вычисления соединен с первымвходом второго счетчика 11 угла псворота. Выход второго счетчикаугла поворота связан с вхоцсм третьего блока 12 сравнения, Я выход пос-. леднего соединен с входом блока 2 управления двигателя 1. Выход датчика 13 угла поворота подключен к вторым входам первого 8 и второго 11 счетчиков угля поворота и четвертому входу интегратора 7.Система управления гайковертом работает следующим образом.После включения блока 2 управления на двигатель 1 подается напряжение, соответствующее требуемому значению скорости вращения двигателя 1, который приводит во вращение гайку резьбового соединения.Датчик 3 крутящего момента контролирует значение крутящего момента, приложенного к гайке резьбового соединения, а бпок 4 измерения крутящего момента преобразует сигнал датчика 3 крутящего момента в цифровой код, На этапе затяжки реэьбовогосоединения при достижении крутящим моментом значения М, срабатывает блок 5 сравнения и выдает сигнал на включение интегратора 7 и счетчика 8 угла поворота, При достижении приращением угла поворота на выходе счетчика 8 угла поворота знаения Л М срабатывает второй блок 9 сравнения, .который выдает сигнал ня запись в регистр 6 значения момента М 2, соответствующего значению угла затяжки У, включение блскЯ 10 вычисления и выключение интегратора 7, который к этому времени формирует ня своем выходе код значений, пропорциональныхгзначениюЬпок 10 вычисленияЧ,через интервал времени порядка нескольких десятков микросекунд выдает ня вход предварительной установки счетчика 11 угла поворота вычислен. ное по формуле значение2аф1а -м После чего счетчик 11 угла поворотаОТСтитЫЧЯЕТ У 2 ОЛ Эа ЯЖ 1 И Н.инаазначения . При дОстижении угломзатяж 1 л значения 12 срабать ваеттвстийл блок 22 срЯвнения н БыдЯстсигнал нс ГКОЦ блока 2 уГ,давлениядвигатсля 1 который управляв" тормох;ением и Остановкой двигателяТаким образом. в результате приме"Ленля цля рясчета Л 1 эедвяпительного1 л 02 Й 21 2 хаче Составитель И. Техред И.Верес орректор В.Вутяга тор Л,Веселовска з 2808/8 Тираж ВНИИПИ Государственн по делам изобретен 3035, Москва, Ж, Рдписн ета ССС ытиио к от аб.,ск играФическое предприятие, г. Ужгород, ул. Праектна енн рои угла затяжки интегральной характеРистики можно определить эту величину с точностью порядка +57, и повысить точность достижения требуемого5 значения усилия затяжки резьбового соединения. Погрешность при этом не будет превышать +10% от требуемого значения.Формула и з обретенияСистема управления гайковертом, содержащая двигатель с блоком управления, датчик крутящего момента, сое - диненный с блоком измерения крутящего момента, датчик угла поворота и пер В вый и второй блоки сравнения, о т - л и ч а ю щ а я.с я тем, что, с целью повышения точности, она снабжена регистром, интегратором, блоком вычисления, первым и вторым счетчика ми угла, третьим блоком сравнения, выход блока измерения соединен с входом первого блока сравнения и первыми входами регистра и интегратора, выход первого блока сравнениясоединен с первым входом первогосчетчика угла и вторым входом интегратора, выход первого счетчика угласвязан с входом второго блока сравнения, выход которого подключен кпервому входу блока вычисления, второму входу регистра и третьему входуинтегратора, выход последнего соединен с вторым входом блока вычисления, к третьему входу которого подсоединен выход регистра, выход блокавычисления соединен с первым входомвторого счетчика угла, выход которого связан с входом третьего блокасравнения, выход последнего подключен к входу блока управления, а выход датчика угла поворота подсоединен к вторым входам первого и второго счетчиков угла и четвертомувходу интегратора.
СмотретьЗаявка
4139242, 28.10.1986
КУЙБЫШЕВСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. В. КУЙБЫШЕВА
НИКОЛАЕВ ВАДИМ АЛЕКСАНДРОВИЧ, СТАРИКОВ АЛЕКСАНДР ВЛАДИМИРОВИЧ
МПК / Метки
МПК: B25B 21/00
Метки: гайковертом
Опубликовано: 15.06.1988
Код ссылки
<a href="https://patents.su/3-1402421-sistema-upravleniya-gajjkovertom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления гайковертом</a>
Устройство для регулирования крутящего момента гайковерта

Номер патента: 1125608
Опубликовано: 23.11.1984
Авторы: Двойниченко, Куприк
МПК: G05D 17/02
Метки: гайковерта, крутящего, момента
...гайки, т.е. реальный момент затяжки выше заданного. Для уменынения это -3 1го эффекта известный гайковерт должен применяться лишь при стягиванииконструкций мягкого типа, что сужаетего область применения,Целью изобретения является повышение точности устройства.Указанная цель достигается тем,что в устройство для регулированиякрутящего момента. гайковерта, содержащее датчики частоты вращения шпин.деля и текущего значения крутящегомомента гайковерта, подключенные соответственно к входам первого и второго блоков умножения на постоянныекоэффициенты, последовательно соединенные элемент сравнения, исполнительный элемент и регулирующий клапан установленный на линии подачивоздуха к приводу шпинделя,введены последовательно соединенные,...
Вибрационно-частотный измеритель крутящего момента и осевой силы

Номер патента: 165561
Опубликовано: 01.01.1964
МПК: G01L 5/00
Метки: вибрационно-частотный, измеритель, крутящего, момента, осевой, силы
...расположенных по обе стороны измерительной перемычки; один из электромагнитов, являющийся индукционным датчиком, включен на вход усилителя; второй электромаг. нит - возбудитель колебаний - соединен в фазе с выходом усилителя.При вращении датчика момента грузы 7 создают компенсационные моменты, исключающие чувствительность датчика к влиянию центробежных сил,При действии оссвой силы спицы упругого элемента деформируются, допуская некоторое перемещение вала вдоль оси. В этом случае спицы 8, несущие кронштейны и измерительную перемычку, перемещаются также вместе с валом. Однако благодаря малой жесткости шарниров 10 эти спицы изгиба практически не испытывают и не передают дополнительных нагрузок на измерительную пере. мычку,Этим...
Устройство для измерения крутящего момента на валу

Номер патента: 746215
Опубликовано: 05.07.1980
Автор: Эпельбаум
МПК: G01L 3/10
Метки: валу, крутящего, момента
...двоичными счетчи ками-"й"дискретностью определения угла скручивания, равной одному градусу. По оси 15 изображены импульсы,поступающие от датчика 1, по оси 16 -импульсы, поступающие от датчика 2,по осям 17-20 - выходные сигналы триггеров счетчика 7, по осям 21-24 -выходные сигналы триггеров счетчика 8,0по оси 25 - импульс сброса, поступающий с блока 14. По осям 25-29 - выходные сигналы блоков поразрядногосравнения 9-94, а по оси 30 - выходной сигнал блока 10 Формирования чиа ла 24, Ось 31 - величина угла скручивания, получаемая на выходе цифрового индикатора 12.Устройство работает следующимобразом.При вращении вала индукторы 3 и 4через равные угловые промежутки (надиаграммах через угол 1 О ) наводят вдатчиках 1 и 2 импульсы....
Способ градуировки измерителя крутящего момента

Номер патента: 1566237
Опубликовано: 23.05.1990
Авторы: Дидык, Кобзев, Маликов, Поджаренко, Шаповалов
МПК: G01L 25/00
Метки: градуировки, измерителя, крутящего, момента
...21 и блок 22 сопряжения.При этом микроЭВМ 18 имеет процессор 23, блок 24 памяти и видеотерминал 25.Способ градуировки измерителя крутящего момента осуществляют следующим образом.Вал приводного двигателя 15 измерителя 12 крутящего момента с помощью муфты 11 сочленяют с валом 3 нагрузочного узла 2. В блоке 24 памяти устанавливают начальный адрес и длину буфера, в котором хранятся значения, Затеи с пульта видеотерминала 25 вводят численные значения Й,Р, соответствующие удельному весу материала используемой нити 6 подвеса, ее диаметру и диаметру шкива 5. После этого процессор 23 микроЭВМ 18 переводят на выполнение программы запуска блока 19 управления.Проворачивание вала приводного двигателя 15 на угол у осуществляется путем подач1-го...
Стенд для нагружения крутящим моментом и тарировки приводов

Номер патента: 175274
Опубликовано: 01.01.1965
Авторы: Артемов, Богатенков, Глазков, Заровный, Панков
МПК: G01L 25/00, G01M 13/02
Метки: крутящим, моментом, нагружения, приводов, стенд, тарировки
...нити 5, перекинутой через блоки 10 и 11. Все узлы и детали смонтированы на раме 12. Для безопасности и удобства работы движущиеся части5 закрыты кожухом 13,Шпиндель передает вращение от испытуемого привода на вал 2 через муфту 14 припомощи конической пары 15. При вращениивала от испытуемого привода нить 5 входитЗО в направляющий паз 15 и отклоняется однойцз профнлцроиашых поверхностей 17 илн 18 - в зависимости от направления врапения.Звездочка, закрепленная на иалу 2, передает вращение посредством гибкой связи 19 звездочке 20 и связанной с ней стрелке 8, показывающей величину крутящего момента.Тормозное фрикционное устройство 6 состоит из храповых колес 21, фрикционных дисков 22 и собачек 28.Храповые колеса свободно вращаются на 10...
Предыдущий патент: Устройство для упрочнения поверхностей
Следующий патент: Пневмогидравлический привод редкоударного гайковерта
Случайный патент: Индуктор линейного двигателя