Система регулирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1298711
Авторы: Киселев, Колокольцов, Мышляев, Сарапулов, Соловьев

Текст
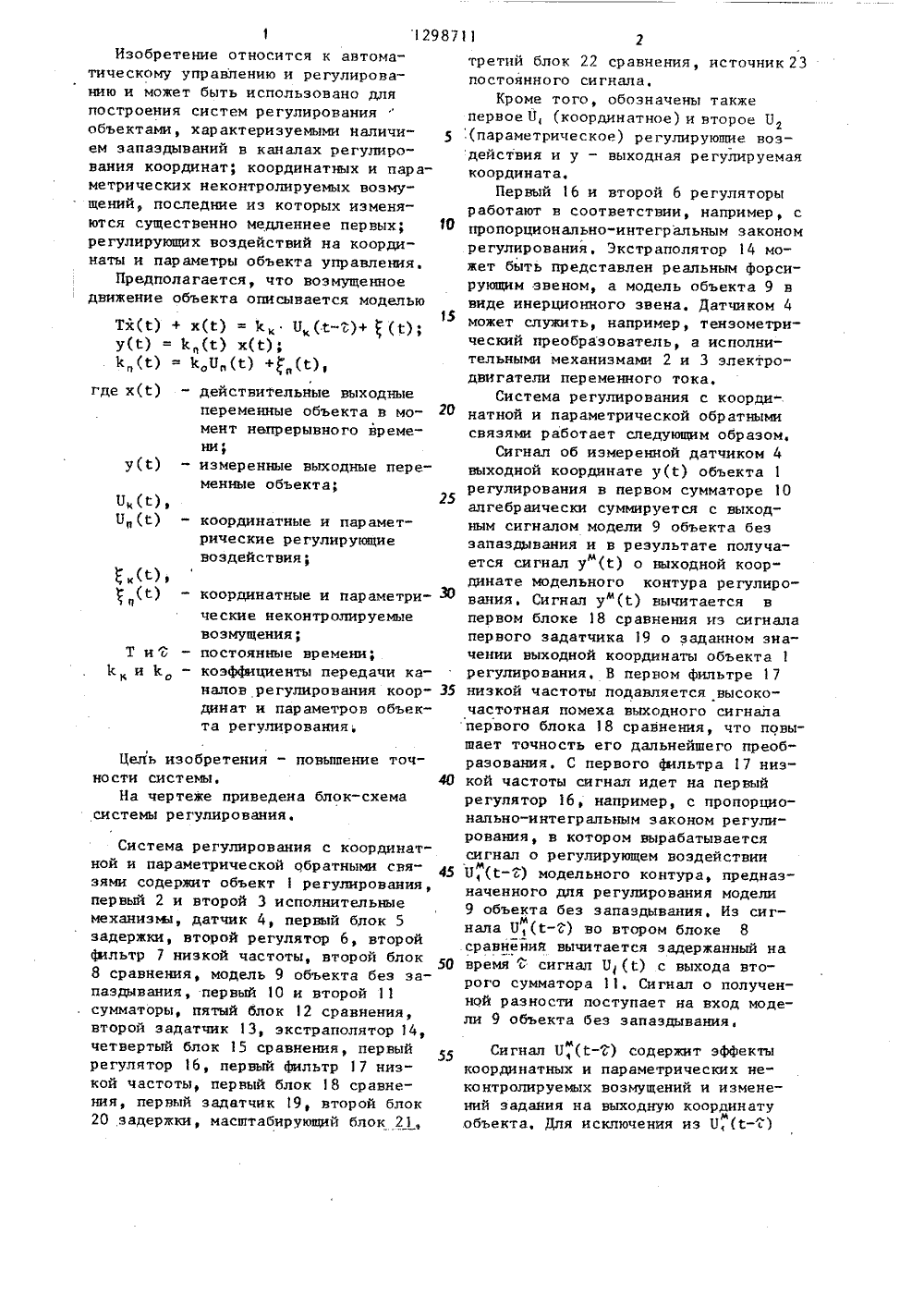
(191 В 13/00 САНИЕ ИЗОБРЕТ ИЯ ВИДЕТЕПЬСТ А ВТОРСНОМ яев,ССС 980 к систеатной ивязями,е точрова ОСУДАРСТВЕННЫИ КОМИТЕТ СССРО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИИ(57), Изобретение относитсямам регулирования с коордипараметрической обр атнымиЦель изобретения - повьппениности систеии. Система регу ния содержит объект 1 регулирования, первый 2 и второй 3 исполнительные механизмы, датчик 4, первыйблок 5 задержки, второй регулятор 6,второй фильтр 7 низкой частоты., второй блок 8 сравнения, модель 9 объекта беэ запаздывания, первый 10 ивторой 11 сумматоры, пятый блок 12сравнения, первый регулятор 16, первый фильтр 17 низкой частоты, первыйблок 18 сравнения, первый задатчик19, второй блок 20 задержки, масштабирующий блок 21, третий блок 22сравнения, источник 23 постоянногосигнапа, 1 ил.1298711Изобретение относится к автоматическому управлению и регулированию и может быть использовано для построения систем регулирования объектами, характеризуемыми наличием запаздываний в каналах регулирования координат, координатных и параметрических неконтролируемых возмущений, последние из которых изменяются существенно медленнее первых; 10 регулирующих воздействий на координаты и параметры объекта управления.Предполагается, что возмущенное движение объекта описывается моделью15Тх(Е) + х(Е) = Зс 1(.)+(с);у( ) =(с) .( ); "к - й,ц(е) +И),где х(1) - действительные выходныепеременные объекта в момент непрерывного времениу(1) - измеренные выходные переменные объекта;25 Т иск и о 1 к (с),Бп(1) - координатные и параметрические регулирующиевоздействия; координатные и параметри ческие неконтролируемыевозмущения;постоянные времени;коэффициенты передачи каналов регулирования координат и параметров объекта регулирования,Цель изобретения - повьппение точности системы. 40 На чертеже приведена блок-схема системы регулирования.Система регулирования с координатной и параметрической обратными свя зями содержит объект 1 регулирования, первый 2 и второй 3 исполнительные механизмы, датчик 4, первый блок 5 задержки, второй регулятор б, второй фильтр 7 низкой частоты, второй блок 8 сравнения, модель 9 объекта без запаздывания, первый 10 и второй 11 сумматоры, пятый блок 12 сравнения, второй эадатчик 13, экстраполятор 14, четвертый блок 15 сравнения, первый регулятор 16, первый фильтр 17 низкой частоты, первый блок 18 сравнения, первый задатчик 19, второй блок 20 задержки, масштабирующий блок 21,третий блок 22 сравнения, источник 23по стоянно го сигнала,Кр оме то го, о боэн ачены т акжепервое Б, (координатное) и второе Б(параметрическое) регулируюшие воздействия и у - выходная регулируемаякоордината.Первый 16 и второй 6 регуляторыработают в соответствии, например, спропорционапьно-интегральным закономрегулирования. Экстраполятор 14 может быть представлен реальным форсирующим звеном, а модель объекта 9 ввиде инерционного звена. Датчиком 4может служить, например, тензометрический преобразователь, а исполнительными механизмами 2 и 3 электродвигатели переменного тока,Система регулирования с координатной и параметрической обратнымисвязями работает следующим образом.Сигнал об измеренной датчиком 4выходной координате у(й) объекта 1регулирования в первом сумматоре 10алгебраически суммнруется с выходным сигналом модели 9 объекта беэзапаздывания и в результате получается сигнал у (й) о выходной координате модельного контура регулирования, Сигнал уф(г.) вычитается впервом блохе 18 сравнения из сигналапервого задатчика 19 о заданном значении выходной координаты объекта 1регулирования, В первом фильтре 17низкой частоты подавляется высокочастотная помеха выходного сигналапервого блока 18 сравнения, что повышает точность его дальнейшего преоб"разования. С первого фильтра 17 низкой частоты сигнал идет на первыйрегулятор 16, например, с пропорционапьно-интегральным законом регулирования, в котором вырабатываетсясигнал о регулирующем воздействииБ,(й-З) модельного контура, предназначенного для регулирования модели9 объекта без запаздывания. Из сигнала Б,(й) во втором блоке 8мсравнейия вычитается задержанный навремя о сигнал У(1:) с выхода второго сумматора 11. Сигнал о полученной разности поступает на вход модели 9 объекта без запаздывания,Сигнал Б, (1:-) содержит эффекты координатных и парамегрических неконтролируемых возмущений и изменений задания на выходную координатуМ л объекта, Для исключения из У, Г-с)1298711 эффектов изменений задания из выходного сигнала первого задатчика 19 втретьем .блоке 22 сравнения вычитается постоянный сигнал, в частности,о среднем значении задания. Сигнапо полученных изменениях пересчитывается в масштабируюшем блоке 21 визменения первого регулирующеговоздействия, задерживается на времяво втором блоке 20 задержки имвычитается из сигнала Б, (й) вчетвертом блоке 15 сравнения, Дпяучета изменений задания на выходнуюкоординату при выработке первого регулирующего воздействия выходнойсигнал масштабирующего блока 21 алгебраически суммируется во второмсумматоре с экстраполированным с помощью экстраполятора 14 сигналом1 (С) и подается на первый исполнительный механизм 2,1 датчик, последовательно включенные,ханизм, выход которого подключен к лятор н второй сумматор с входом с вторым входом второго сумматора, выход45 первого задатчика подключен к второму входу третьего блока сравнения, выход вто-ого задатчика - к второмувходу пятого блока сравнения,. Тираж А, ЛащевТехред И.Попович Корректор О.Луговая Редактор Н. Бобкова Заказ 886/49 ,Тираж 864 Подпи сное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб д. 4/5Производственно-полиграфическое предприятие, г. Ужгород, ул, Проектная,Для выделения из сигнала 0 (й-с) эффектов параметрических неконтролируемых возмущений осуществляется его фильтрация с помощью второго фильтра 7 низкой частоты, Однако предварительно из сигнала 0 (-) вычитается в пятом блоке 12 сравнения его опорное значение, сигнал о котором поступает с выхода второго задатчика 13. Опорное значение сигнала 1 (-С) определяется при запуске системы,М,лкак среднее значение 1 (г.-) на заданном интервале при известных коэф 4 ициентах модели объектарегулирования, которые устанавливаются в модель 9 объекта без запаздывания, Выходной сигнал второго фильтра 7 низкой частоты подается на второй регулятор 6, регулирующее воздействие которого направлено на стабилизацию параметров объекта 1 регулирования, Выходной сигнал второго регулятора 6 поступает на второй исполнительный механизм 3, который изменяет в тре" буемом направлении параметры объекта, в частности как в примере с непрерывным доэатором меняет натяжение ленты транспортера,Введение новых блоков н связей позволяет повысить точность регулирования выходной координаты за счет стабилизации параметров объекта регулирования. Формула изобретенияСистема регулирования, содержащаяпервый задатчик, первый блок задержки, последовательно включенные первый исполнительный механизм, объект регулирования, датчик, первый сумма тор, первый блок сравнения, первыйфильтр низкой частоты, первый рег 6 тятор, второй блок сравнения и модель .объекта без запаздывания, выход которой подключен к второму входу пер вого сумматора, выход первого задатчика соединен с вторым входом первого блока сравнения, вход первого исполнительного механизма связан через первый блок задержки с вторым входом второго блока сравнения, .о т л и - ч а ю щ а я с я тем, что, с целью повышения точности системы, в нее введены второй сумматор, второй заисточник постоянного сигнала, третий блок сравнения, масштабирующий блок, второй блок задержки, четвертый блок сравнения, пятый блок сравнения, второй фильтр низкой частоты, второй ре 35 гулятор и второй исполнительный мевторому входу объекта регулирования,выход первого регулятора соединен через последовательно включенные 40 четвертый блок сравнения, экстрапо первого исполнительного механизма,выход масштабирующего блока соединен
СмотретьЗаявка
3869535, 20.03.1985
ПРЕДПРИЯТИЕ ПЯ Р-6335
СОЛОВЬЕВ ВИКТОР ИВАНОВИЧ, МЫШЛЯЕВ ЛЕОНИД ПАВЛОВИЧ, КОЛОКОЛЬЦОВ БОРИС ИВАНОВИЧ, КИСЕЛЕВ СТАНИСЛАВ ФИЛИППОВИЧ, САРАПУЛОВ ЮРИЙ АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: G05B 13/00
Метки:
Опубликовано: 23.03.1987
Код ссылки
<a href="https://patents.su/3-1298711-sistema-regulirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Система регулирования</a>
Устройство для обнаружения и ликвидации сбоев в блоке управления объектом

Номер патента: 1168949
Опубликовано: 23.07.1985
Авторы: Афанасьев, Васильев, Лихачев
МПК: G06F 11/14
Метки: блоке, ликвидации, обнаружения, объектом, сбоев
...генератор 8 тактовых импульсов, триггер 9. ошибки, элемент НЕ 10, элемент И 11.Устройство работает следующим обра. зом,В условиях нормальной работы (сбой отсутствует) блок управления объектом выполняет программу по одному из и возможных циклов работы, при этом на объект 4 управления с информационных выходов блока управления поступает один или несколько сигналов управления (например, печать информации с помощью электропишущей машинки). Одновременно эти же сигналы поступают на входы элемента ИЛИ 5 (фиг. 2 в). Выходной сигнал этого элемента формируется формирователем 6 длительного сигнала и поступает на вход установки триггера 9 ошибки, на инверсном выходе которого устанавливается нулевой уровень (фиг. 2 б), запирающий по первому входу...
Устройство для воздействия на биологический объект импульсным электромагнитным полем низкой частоты

Номер патента: 1836116
Опубликовано: 23.08.1993
Авторы: Голубев, Заславский, Комарова, Максименков, Тарутин
МПК: A61N 2/04
Метки: биологический, воздействия, импульсным, низкой, объект, полем, частоты, электромагнитным
...конденсаторные пластины 15, 16 и 17 и на входы индикаторов 10, 11 и 12, предназначенньх для контроля за работой устройства.Конденсаторные пластины 14 и реднаэначены для преобразования пачки импульсов отрицательной полярности в перемещающее в пространстве низкочастотное импульсное электромагнитное поле, локализованное в местах болевого синдрома. Создаваемое поле характеризуется напряженностью 0,02 - 1 В/см, Скорость перемещения поля определяется формулойгде Я - расстояние между парой. пластин(фиг,7),тп 1 - время процедуры на выходе одной.конденсаторной пластины, фиг.2 в.Т; - В 2 С 2,Выполнение таймера 1 известно,Пример выполнения распределителя 2приведен на фиг.З. Распределитель 2 состо ит из сдвигового регистра Д 1; ряда из...
Удвоитель частоты сигнала

Номер патента: 828366
Опубликовано: 07.05.1981
Автор: Заклецкая
МПК: H03B 19/06
Метки: сигнала, удвоитель, частоты
...в момент времени , и т, д, Каждый период времени обеспечивается стабилизация выходного сигнала интегратора 2 (привязка к нулевой линии) за счет кратковременного разряда конденсатора в моменты, соответствующие нулевому значению треугольного напряжения,Аналогично работает интегратор Х Управляемый проинвертированными биполярцыыи импульсами (диаграмма б) интегратор 3 формирует напряжение отрицательной полярности, начиная от момента времени 10 до 1 ь когда аналоговый ключ 7 разрядит конденсатор интегратора 3 ло нулевого значения, после чего формируется треугольное напряжение положительной полярности. Привязка к нулевому уровню треугольного напряжения происходит аналогично описанному выше.Таким образом, на интеграторах 2, 3 формируются...
Устройство для измерения низких частот

Номер патента: 966618
Опубликовано: 15.10.1982
МПК: G01R 23/10
...706780. 6,8447965 929322 7 10 8,7 10 4,6 10 619548 826064 419032, 413032.722806 929322 8,447965 4,479459 872320 462540 4,9 10 495080 4,794592 8,2 10 9,710 "3 6,7. 10" 6,1 10 7,945921 9,459218 4,592186 5,921865 820480 976740 7 41303261148 516 290 . 94190 474180 611480 103258 = 9,684976. Иэ этого числав результате фиксируется целая егочасть, т.е. 9, а остаток используется для формирования второго числа -делимого. Время преобразования первого временного интервалаТн 510: 10 = 10 сВторое чйсло -деб В -а пЕ.- р,лимое формируют как умноженная на 10разность между первым делимым и произведением результата деления начисло й, 1 Ой =(й-И .й ).10=(10 - 9,103258)10Ф й Хл т706 780,Второй цикл преобразования происходит как и в первом случае, т.е....
Фильтр низкой частоты

Номер патента: 244440
Опубликовано: 01.01.1969
Автор: Рза
МПК: H03H 11/04
Метки: низкой, фильтр, частоты
...блок 1 одновременно лодключен к измерительному каналу 2 и компенсационно му каналу 3. От блока 1, состоящего из датчика 4, работающего на несущей частоте, и усилителя б напряжение несущей частоты и помехи подаются в измерительный канал 2, Он содержит измерительный детектор б, 25 фильтр 7 и регистрирующий прибор 8, Одновременно указанное напряжение подается в компенсационный канал 3, содержащий детектор 9, разделительную КС-цепочку 10, усилитель-ограничитель 11, КС-фильтр 12, пред назначенный для компенсации возможного фазового сдвига напряжения помехи при прохождении через разделительную цепочку 10. На второй вход модулятора 13 канала, подается напряжение несущей, С выхода регулируемого делителя 14 напряжение несущей,...
Предыдущий патент: Система управления вертикальными перемещениями рабочего органа льдоскалывающего агрегата
Следующий патент: Устройство для программного управления циклическими процессами
Случайный патент: Одновинтовой насос