Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
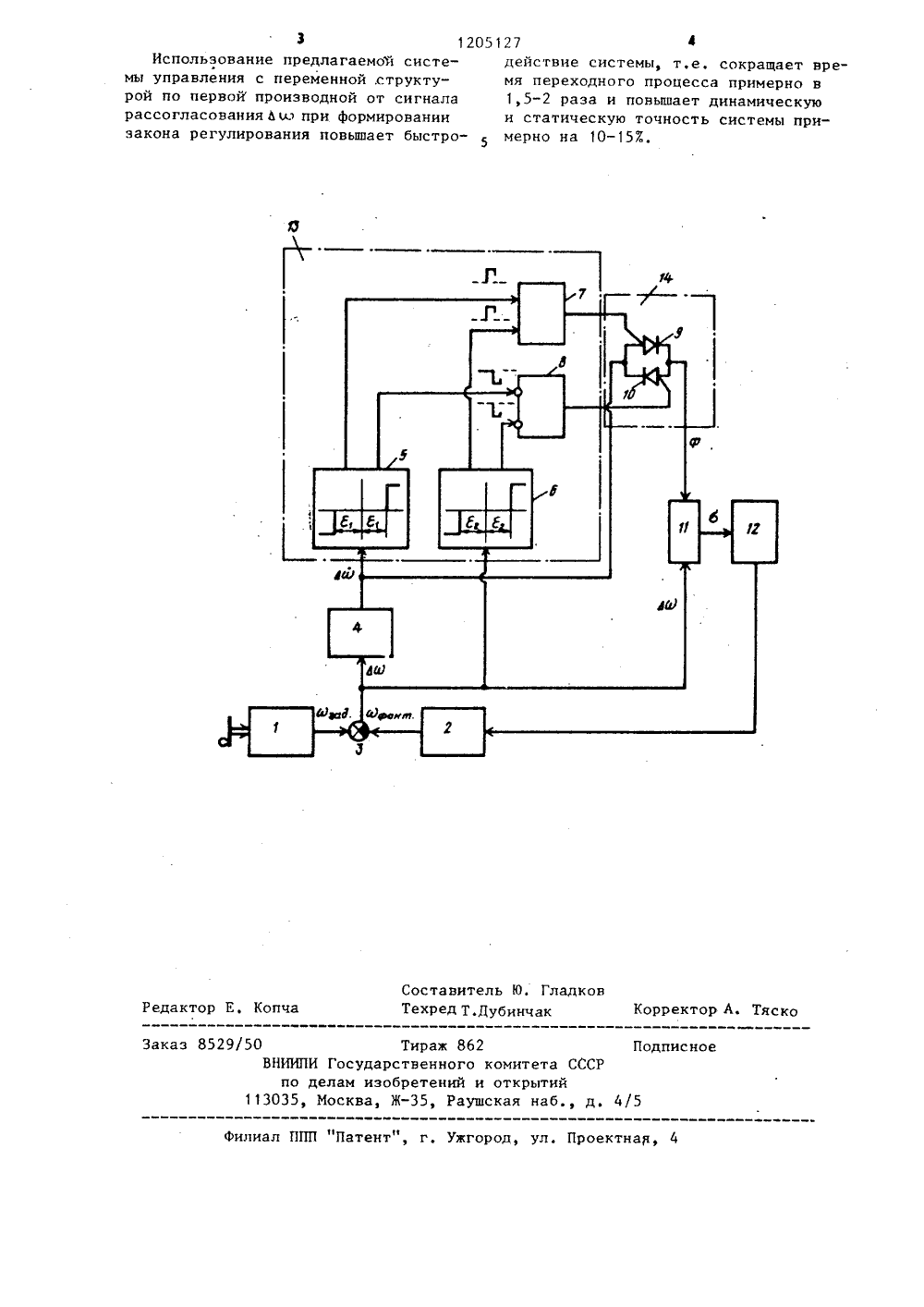
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИК 11 ф С 05 В 13/О ОП НИЕ ИЗОБРЕТ ВТОРСНОМЪГ СВ ЕЛЬСТВ ГОСУДАРСТВЕННЫЙ МОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИ(54)(57) 1. СИСТЕМА УПРАВЛЕНИЯ, содержащая последовательно соединенные задатчик, измеритель рассогласования,суммирующий усилитель, сервомеханиэми датчик главной обратной связи, подключенный выходом к второму входуизмерителя рассогласования, соединенного выходом через дифференциатор с сигнальным входом коммутатора,подключенного первым управляющим,802 5127 А входом к выходу релейного блока управления, а вь 1 ходом - к второму входу суммирующего усилителя, о тл и ч а ю щ а я с я тем, что, с цель повышения быстродействия и точности системы, в ней первый и второй входы релейного блока управления соединены с выходами дифференциатора и измерителя рассогласования, .а второй выход - с вторым управляющим входом коммутатора.2. Система по п. 1, о т л и ч а ющ а я с я тем, что релейный блок управления содержит первый и второй трехпоэиционные релейные элементы, первыми выходами подсодиненные к входам первого элемента И, а вторыми выходами - к входам второго элемента И, выходы которых являются выходами релейного блока управления, а входы трехпозиционных релейных блоков являются входами релейного блока управления.1205 35 зом.На выходе задатчика 1 формируется заданное значение регулируемого параметра, например частоты, На выходе датчика 2 главной обратной связи формируется текущее значение регулируемого параметра, например частоты. Выходные сигналы задатчика 1 и датчика 2 главной обратной связи поступают на входы из 50 Изобретение относится к приборостроению и средствам автоматики иможет быть применено при реализациичастоты вращения электродвигателя,Цель изобретения - повышение быстродействия и точности системы,На чертеже изображена блок-схемасистемы,На схеме обозначены эадатчик 1,датчик 2 главной обратной связи, 10измеритель 3 рассогласования, дифференциатор 4, первый и второй трехпозиционные релейные элементы 5 и 6,первый и второй элементы И 7 и 8,Первый и второй управляемые диоды9 и 10, суммирующий усилитель 11,сервомеханизм 12, релейный блок 13управления, коммутатор 14, ьза, оз - .рыходные сигналы задатчика 7 и датчика 2 главной обратной связи системы, ьи - выходной сигнал дифференциатора 4, Еоз - выходной сигнал измерителя 3 рассогласования, о - выходной сигнал суммирующего усилителя 11,4 з- выходной сигнал коммутатора 14, 25Еи Я - зоны нечувствительностипервого и второго трехпозиционныхрелейных элементов 5 и 6.В состав релейного блока 13 управ.ления входят первый и второй трехпо- .эициоиные релейные элементы 5 и 6и первый и второй элементы И 7 и 8,В состав коммутатора 14 входятпервый и второй управляемые диоды9 и 10.Сервомеханизм 12 содержит параллельные и последовательные звенья,усилитель мощности, исполнительныйдвигатель и редуктор и может бытьпостроен по известной стандартнойфункциональной схеме,Система работает следующим обра 127 2мерителя 3 рассогласования, в котором сравниваютсяВыходной сигнал измерителя 3 рассогласования поступает на вход дифференциатора 4 без второго трехпозиционного релейного элеМента 6 и первый вход суммирующего усилителя 11Выходной сигнал дифференциатора 4 поступает на вход первого трех- позиционного релейного элемента 5 и на сигнальный вход коммутатора 14,Первый 5 и второй 6 трехпозиционные элементы совместно с первым 7 и вторым 8 элементами И в совокупности представляют релейный блок управ ления, который анализирует знаки сигналовьюиьйи их величину относительно зоны нечувствительности, определяемой значениями Яи 1. Если Ь Ю) и А й)Г, то срабатывают релейные элементы 5 и 6, с первых выходов которых поступают положительные сигналы на входы элемента И 7. При этом элемент И 7 срабатывает, и на его выходе формируется сигнал, подаваемый на управляющий вход первого управляемого диода 9, под воздействием которого он открывается и пропускает сигнально" на второй вход суммирующего усилителя 11, где сигнал ьо; и сигнал дисуммируется, усиливаются и поступают на вход сервомеханизма 12. Если АиГ и ЛАМ.:., то также срабатывают релейные элементы 5 и 6, с вторых выходов которых поступают отрицательные сигналы на инвертирующий вход элемента И 8. Далее система работает аналогично) но вместо управляемого диода 9 срабатывает управляемый диод 10. Иначе работает система, если лщ)8,и выем;, или ды." и аобу). В этом случае элементы И 7 и 8 не срабатывают, и управляемые диоды 9 и 10 остаются в закрытом положении, а с выхода усилителя 11 на вход сервомеханизма 12 поступает только усиленный сигнал лы,В общем случае сигнал регулирования ( 4 ), поступающий на вход сервомеханизма 12, формируется следующим образом;127 Составитель Ю. ГладковТехРед Т.Дубинчак Корректор А. Тяско Редактор Е, Копча Заказ 8529/50 Тираж 862ВНИИПИ Государственного комитета СССРпо делам изобретений и открытий113035, Москва, Ж, Раушская наб., д. 4/5 Подписное Филиал ППП "Патент", г. Ужгород, ул. Проектная, 4 3 1205Использование предлагаемой системы управления с переменной .структурой по первой производной от сигнала рассогласования Ьк при формировании закона регулирования повышает быстро 5 действие системы, т,е. сокращает время переходного процесса примерно в1,5-2 раза и повышает динамическуюи статическую точность системы примерно на 10-157.
СмотретьЗаявка
3754529, 12.06.1984
ВОЙСКОВАЯ ЧАСТЬ 27177-Л
ЖУКОВ БОРИС ПЕТРОВИЧ, КРИВУЛЯ АЛЕКСАНДР АНАТОЛЬЕВИЧ, КРУГЛОВ ВАЛЕРИЙ НИКОЛАЕВИЧ, ПАШКИН БОРИС ФЕДОРОВИЧ, ЭНТИН СЕМЕН БОРИСОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки:
Опубликовано: 15.01.1986
Код ссылки
<a href="https://patents.su/3-1205127-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Многопороговый релейный элемент с опережающей характеристикой

Номер патента: 991597
Опубликовано: 23.01.1983
МПК: H03K 5/24
Метки: многопороговый, опережающей, релейный, характеристикой, элемент
...интегратора 5 Г (при Х=О, у=О) на величину Ь (релейный элемент 3 включ .н до тех пор, пока сигнал Я не станет равным 25 нулю), Выходной сигнал Я элемента 2 сравнения определяется равенством . Я =Х-Г30Условие Я = О (условия отпускания релейного элемента 3) при Х=Й могут быть выполнены при 1=1. Полагая далее, что 1 Х(с Ус, можно считать,что изменение сигнала Л на величину Ь 3 происходит за кброткое время Т ( гвремя включенного состояния релейного элемента 3), в течении которого величина Х изменяетбя несущественно.Если далее входной сигнал Х продол-, жает возрастать, то при Х=Х (Х=2 Ц срабатывает релейный элемент 3 на время Ч , подтверждая единичное состояние триггера б (фиг, 2), и увеличивает сигнал 2 на величину Й (3 =2 Ь).45 Пусть Х...
Устройство для настройки терморегуляторов с релейным элементом на выходе

Номер патента: 1084764
Опубликовано: 07.04.1984
Авторы: Базаров, Бирюков, Ершова, Семовских
МПК: G05D 23/19
Метки: выходе, настройки, релейным, терморегуляторов, элементом
...памяти, первый вход которого через третий элемент И соединен с первыми входами четвертого, пятого и шестого элементов И и свыходом второго элементапамяти, второй вход третьего элемента памяти, являющийся первым информационным входом блока настройки, связан с первым входом второго элемента И и в,горым входом шестого элемен та И, третий вход которого, являющий- ся первым управляюшим входом блоканастройки, подключен к второму входутретьего элемента И и первому входупервого элемента памяти, вторым входом связанного с первым входом второгО элемента памяти, а выходом черезпервый элемент И с вторым входомвторого элемента памяти, причем втозрой вход первого элемента И, являющийся вторым управляющим входомблока настройки, связан с вторымвходом...
Многопороговый релейный элемент с опережающей характеристикой

Номер патента: 1629977
Опубликовано: 23.02.1991
Автор: Леденев
Метки: многопороговый, опережающей, релейный, характеристикой, элемент
...триггера 20 и делителя 17частоты. Одновременно сигнал Од= П (Ц, - уровень выходного сигнала Б ) вызывает изменение выходного сигнала интегратора 4 1 на величину 3 (релейный элемент 2 включен до тех пор, пока выходной сигнал элемента сравнения 8 не станет равным 0). Вы" ходкой сигнал элемента 1 сравнения ра+ вен Я = Х - 1. Условие 8 = 0.(условия отпускания первого релейного элемен- та 2)при Х = ц могут быть выполнены при 1 = , Полагая далее, чтоФ/Х /( П, можно считать, что изменение сигнала 1 на величину о происхо- дит за короткое время(1; " время включенного состояния релейного элемента 2), в течение которого величина Х изменяется несущественно. 20 Если далее сигнал Х продолжаетвозрастать, то при Х = 2 О срабатывает первый...
Способ формирования трехуровневого управляющего сигнала в релейных системах управления динамическим объектом и релейный регулятор для механизации этого способа

Номер патента: 1777119
Опубликовано: 23.11.1992
Автор: Леденев
МПК: G05B 11/14
Метки: динамическим, механизации, объектом, регулятор, релейный, релейных, сигнала, системах, способа, трехуровневого, управляющего, формирования, этого
...и отпускэния 15 пятого релейного элемента 20, Рз = 1(Р= 1,В 5 = 1), Рз - выходной сигнал третьего элемента И 9 удерживает первый триггер 22 в нулевом состоянии, Р 4 = 0 (Р 4 = 1), Р 4 и Р 4 - соответственно прямой и инверсный выхо ды четвертого элемента И 10, Т 2 = 0 (Т 2 = 1),Т 2 и Т 2 - прямой и инверсный выходы второ-.го триггера 13, К 2 = О, К 2 - выходной сигнал второго ключа 19 равен нулю, так как этот ключ закрыт сигналом Т 2 = О. Вб = 1, Вв - 25 выходной сигнал шестого релейного элемента 21, йб = 1, так как К 2-д, - д - уровень срабатывания и отпускания шестого релейного элемента 21, Р 5 = 0 (Р 4 = 1, Во = 1), Р 5 - выходной сигнал пятого элемента 30 И 11, Рб = 0 (Т 1 = 1, Вз = 0), Рб - выходнойсигнал шестого элемента И...
Устройство для сравнения выходных сигналов релейных регулирующих приборов

Номер патента: 551602
Опубликовано: 25.03.1977
МПК: G05B 1/01
Метки: выходных, приборов, регулирующих, релейных, сигналов, сравнения
...вторые выходы первого и второго формирователей импульсов,первые входы которых соединены соответственно с первыми выходами первого и второго регулирующих приборов, вторые выходы которых подключены соответственноко вторым входам второго и первого формирователей импульсов, а выход логического элемента ИЛИ через селектор импульсов соединен со вторым входом порогового блока.Источники информации, принятые вовнимание при экспертизе:1. Электрические измерения. Под. ред,Фремко А. Ф. М.-Л., ГЭИ, 1954.2. Автоматизация производства и промышленная электроника. М., Советскаяэнциклопедия, 1963 т. 2.3. Авт, свид. СССР М 223875,М. Кл. б 05 В 1/01 21.04 Я 7 (прототип) На чертеже представлена структурнаясхема электрического устройства для сравнения...
Предыдущий патент: Устройство для формирования временных интервалов хода балансовых часов
Следующий патент: Устройство для программного управления циклическими процессами энергосистемы
Случайный патент: Осевой двухступенчатый вентилятор