Система управления штамповочным молотом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
(51) ГОСУД АРСПО ДЕЛ ННЫИ КОМИТЕТ СССРЭОБРЕТЕНИЙ И ОТКРЫТИ ПИСАНИЕ ИЗОБРЕТЕН Н АВТО ЬСТ(54)(57) СИСТЕМА УПРАВЛЕНИЯ ШТАМПОВОЧНЫМ МОЛОТОМ, содержащая связанныйс приводом молота исполнительный блок,задатчик импульсов в виде зубчатойрейки, основной и дополнительныйдатчики положения подвижных частей,задатчик программы, а также блок совпадения высоты подъема подвижных частей, соединенный с исполнительным "блоком задатчиком программы и блокомвычисления высоты подъема подвижныхчастей, о т л и ч а ю щ а я с я тем, что, с целью повышения точностипоковок и стойкости штампов путемконтроля высоты. поковки во времяштамповки и введения коррекции в за-.дание энергии ударов, она снабженапоследовательно соединенными компрессором, пневмоэлектрическим преобразователем и пневмодатчиком, встроеннымв нижний штамп, а также эадатчикомвертикальных размеров поковки и блоком сравнения, выход которого соединен с входом задатчика программы,входы блока сравнения соединены огинс выходом задатчика вертикальных размеров поковки, другой - с пневмоэлектрическим преобразователем, причемосновной датчик положения подвижныхчастей подключен к входу блока вычисления высоты подъема подвижных частей, а дополнительный - к входу исполнительного блока.Изобретение относится к машиностроению, в частности к конструкции оборудования для обработки давлением.Цепью изобретения является повышение точности поковок путем контроля их высоты во время штамповки и введения соответствующей коррекции в задание энергии ударов. Последнее также исключает работу с избыточной энергией удара, что приводит к увели-О чению стойкости штампов.На чертеже представлена предложенная система, блок-схема.Система управления молотом содержит установленный на подвижных час тях (бабе) 1 задатчик 2 импульсов в виде зубчатой рейки, взаимодействующей с бесконтактными датчиками 3 и 4 положениями бабы, основной 3 и дополнительный 4 датчики, Выход датчика 3 20 ,связан с входом блока 5 вычисления высоты подъема бабы, выход которого связан с входом блока 6 совпадения высоты подъема бабы, другой вход ко-. торого связан с выходом задатчика 7 25 программы, а выход связан с входом исполнительного блока 8, другие входы которого соответственно связаны с выходом дополнительного датчика 4 и выходом задатчика 7 програьаы, а вы ход блока 8 связан с приводом 9 молота. Вход задатчика 7 программы связан с выходом блока 10 сравнения, входы которого связаны с выходом задатчиком 11 вертикальных размеров З поковки и выходом пневмоэлектрического преобразователя 12, другой выход которого пневматически связан с входом пневматического датчика 13, а вход пневматически связан с выходом 40 компрессора 14.Система управления работает следующим образом.В исходном положении баба 1 находптся в верхнем положении. С блока задатчика 7 программы в исполнительный блок 8 вырабатывает управляющий сигнал, который поступает в привод 9 молота. Баба 1 начинает разгоняться энергоносителем до момента дости жения положения, соответствующего дополнительному датчику 4. При этом в исполнительный блок 8 поступает команда на ход подвижных частей вверх. В процессе деформирования по- у ковки выдувается струя воздуха из пневматического датчика .13, установ" пенного в нижнем штампе в направлении движения верхнего штампа. По мере приближения верхнего штампа к нижнему увеличивается сопротивление истечению воздуха и уменьшается расход из пневматического датчика 13. Так как расход воздуха из компрессора 14 постоянный, то увеличивается давление воздуха в пневмоэлектрическом преобразователе 12. Изменению давления воздуха соответствует изменение электрического сигнала, поступающего с пневмоэлектрического преобразователя 12 в блок 10 сравнения, На другой вход блока 10 сравнения поступает сигнал с выхода задатчика 11 вертикальных размеров поковки. Если сигнал с пневмоэлектрического преобразователя 12 равен сигналу с задатчика 11, соответствующему конечному размеру поковки, то с блока 10 сравнения в задатчик 7 программы поступает сигнал на окончание технологического цикла.Если поковка недоштампована, то с блока 10 сравнения задатчик 7 программЫ поступает сигнал, свидетельствующий о разности заданной Ь и полученной Ь высот поковки. Этот сигнал соответствует величине энергии ЬЕ, необходимой для доштамповки ,поковки. С задатчика 7 программы в блок 6 совпадения высоты подъема бабы поступает сигнал, соответствующий высоте подъема бабы 1, необходимой для доштамповки заданной поковки, затем задатчик 7 программы вырабатывает сигнал на подъем бабы вверх, который поступает в исполнительный блок 8. При подъеме бабы бесконтактный датчик 3 взаимодействует с рейкой 2. Сигнал с датчика 3 поступает в блок 5 вычисления высоты подъема бабы, где вычисляется величина подъема Н. При этом блок 5 вырабатывает непрерывный сигнал, который поступает в блок 7 совпадения высоты подъема бабы, на другой вход которого поступает сигнал с задатчика 7 программы, соответствующий высоте подъема бабы Н, необходимой для доштамповки поковки. При совпадении этих сигналов блок 6 совпадения высоты подъема бабы вырабатывает сигнал на останов бабы, который через исполнительный блок 8 поступает в привод 9. После останова бабы задатчик 7 программы вырабатывает сиг-, нал на нанесение удара, который по11 5632 точность отработки молотом заданной энергии ударов на окончательный размер поковки и приводит к устранению как недоштамповки, так и ударов с избыточной энергией, что приводит к повышению стойкости штампов.Этим обуславливается эффективность использования системы управления. Составитель В.СтоколоРедактор Н.Горват Техред Ж.Кастелевич орректор С,Шекмар Заказ 526 Тираж 493Государственного комиам изобретений и отосква, Ж, Раушск по дел3035, М ул,Проектная, 4 ал ППП "Пат.Ужгор ступает в исполнительный блок 9. Удары наносятся до тех пор, пока с блока 10 сравнения в задатчик 7 программы не поступит команда об окончании штамповочного цикла.Предложенная система управления молотом позволяет устранить влияние колебаний параметров заготовки и неНодписноета СССРытийнаб д.45
СмотретьЗаявка
3708305, 06.01.1984
МВТУ ИМ. Н. Э. БАУМАНА
БАБИН НИКОЛАЙ БОРИСОВИЧ, ГОРЯЧЕВ СЕРГЕЙ АНАТОЛЬЕВИЧ
МПК / Метки
МПК: B21J 7/46
Метки: молотом, штамповочным
Опубликовано: 30.08.1985
Код ссылки
<a href="https://patents.su/3-1175632-sistema-upravleniya-shtampovochnym-molotom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления штамповочным молотом</a>
Устройство для обнаружения ошибок в блоках памяти программ
Номер патента: 1278982
Опубликовано: 23.12.1986
МПК: G11C 29/00
Метки: блоках, обнаружения, ошибок, памяти, программ
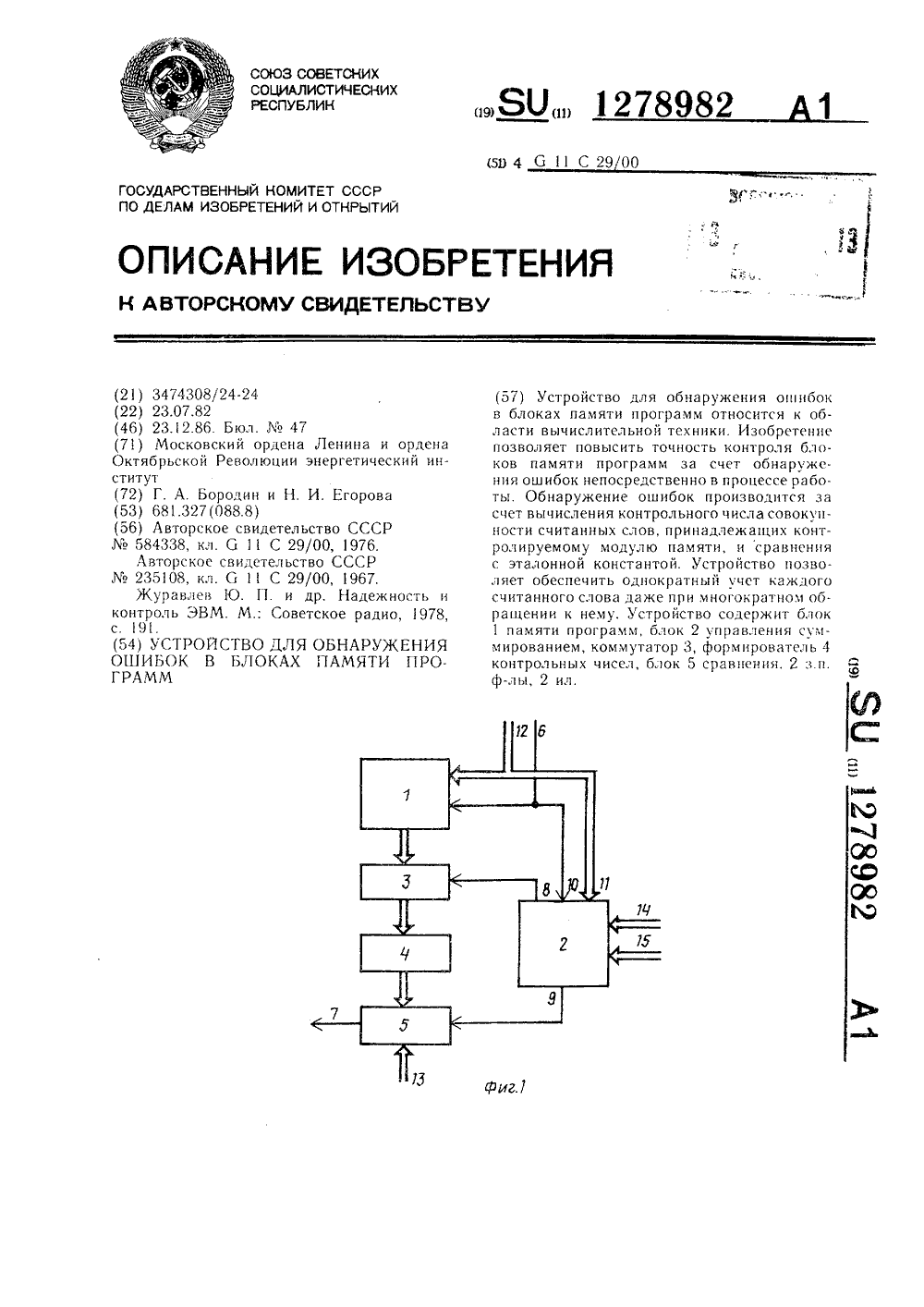
...совылают, цто означает оорыИсце к коц; ролируслому модуло памяги, тс б,Ок 9 .рыв 110- ция вырабатывает разрспы юИи й 1 с)тс 1 сиыл, поступаю)ций на 1)-вход тр. геры 20. Импульс разрешения выооркц по вход, 6 ностуцает церез коммутатор 18 Еа вход оловибратора 21, кото)ый формируе; импульс нужной е.телыОс) и л.)я обрыИе;1 я к блоку 32 Опс.ративОЙ 1.2 МИЕИ, 10 сту цые 01 пи Й рез формирователь 25 ы в:ол 35 Колыадресов младших разрядов в это время через коммутатор 38 поступают на вход 34. г 1 о входу 31 установлен режим считывания из блока 32 памяти. В результате этого по здпрашиваемому адресу выбирается информация (единица или ноль). Возможны двд про. должения работы блока 2:1. Если считывается единица - признак первого обращения по...
Блок выбора диапазона пневматического сигнала

Номер патента: 767777
Опубликовано: 30.09.1980
Авторы: Жуков, Розенцвейг, Ткачук
МПК: G06G 5/00
Метки: блок, выбора, диапазона, пневматического, сигнала
...ю б, то на выходе элемента 3 сравнеЕли сигщл ж 10 не превышает давле тчика 4 то н выходе элемента 1срвинйя будет сф рмирован сигналф 1",после элемента 2 сравнения - "0" и щ,х 50 открывается клапан 21 и закрывается клапанде элемента 3 сравнени - ". С34, С каналом 10 сое не,я - . игнал с элемента 1 Тлиней,только канал 25.аким образом, данное устройство посравнения усиливается реле 26 и после этого поступодклю.чает канал 1 О к одному из каналов 22, 23,- пает одновременно на клапаны 18, 31 и через эле 25юи в зависимости от того, в каком: Мент 27 на клапаны 32 и 19, при этом нормально- ди б55 диапазоне удет находиться пневматическийоткрытый контакт коммутационного клапана 31 сигщл, подводимый к крь я, а нормально-закрытый открыва-...
Устройство для контроля и диагностики цифровых блоков

Номер патента: 1067506
Опубликовано: 15.01.1984
Авторы: Руденко, Шилинговский
МПК: G06F 11/16
Метки: блоков, диагностики, цифровых
...соответственно к счетному и установочному входам счетчика каналов, выход которогоподключен к третьему входу первогомультиплексора и к вторым входамвторого мультиплексора и схемы сравнения, девятый выход блока управления подключен к входу занесения регистра адреса, счетный вход которогоподключен к второму выходу блокауправления, информационный входрегистра адреса является адреснымвходом устройства, а выход подключенк информационному входу счетчика адреса, счетный вход и вход занесениякоторого подключены соответственно,к десятому и одиннадцатому выходамблока управления, двенадцатый выходблока управления подключен к установочным входам регистра. коммутациии регистра каналов, выход счетчикаадреса подключен к адресному входублока...
Устройство для контроля цифровых блоков

Номер патента: 1661768
Опубликовано: 07.07.1991
Авторы: Прилежаев, Смирнов, Соломин
МПК: G06F 11/26
...запишутся в регистр 42 и через элемент 44, двунаправленный приемопередатчик 45 на контролируемый блок бу-, дет выдано значение Н/Ь канала. Команда Тестовая инструкция с передачей воздействия на контролируемыйблок и со сравнением" имеет несколько микрокомандных последовательностей. Микрокоманды У(29), У(20) работают аналогично описанному. По микрокоманде У(7), поступающей на синхровход триггера 13 блока 3, триггер 13 переключается и адрес следующей микрокомандной последовательности будет определяться микрокомандами У(8)-У(14) и выходом мультиплексора 4 до тех пор,пока в ТЗ/5 по У(7) триггер 13 снова не переключится. В ТЗ/1 после выдачи тестового воздействия на цифровой блок по микрокоманде У(30), которая поступает на вход "Установка в 1"...
Способ управления блоком параллельно работающих аппаратов
Номер патента: 1000097
Опубликовано: 28.02.1983
Авторы: Еремеев, Каграманов, Леханов
МПК: B01J 19/00
Метки: аппаратов, блоком, параллельно, работающих
...органами 5, изменяя расходсырья в кристаллиэаторах 1 в соответствии с заданным значением.Концентрацию целевого продуктаконцентрацию кристаллов ) борной кислоты в растворе борной кислоты изме, ряют датчики б,В период Пуска кристаллизаторов : 1 в работу для одного из них определяют первоначальное время запазды вания кристаллиэатора по каналу расход сырья - концентрация, Для этого наносят ступенчатое возмущение по ф расходу сырья и следят за скоростьюизменения концентрации целевого про ,дукта. Скорость изменения концентра ции определяют в блоке 11.Для получения качественного переходного процесса по концентрации целевого продукта расход сырья на крис.таллизатор 1 увеличивают.илиуменьшают от текущего значения до значения, равного 1,05...
Предыдущий патент: Устройство для нарезания конической резьбы
Следующий патент: Способ повышения износостойкости поворотных резцов
Случайный патент: Режущий орган погрузочно-разгрузочной машины