Устройство для управления приводом хлопкоочистительной машины
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
СОЮЗ СОВЕТСКИХ СОЦИАЛИСТИЧЕСКИ СПУБЛИН 80 3/00 ЗВ П ИСАНИЕ ИЗОБРЕТЕНИ ТЕЛЬСТВ АВТОРСКОМУ Св ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОЧКРЫТИ(71) Специальное конструкторскотехнологическое бюро "Техноприбор"(56) 1, Авторское свидетельство СССРВ 926096, кл. Р 01 С 23/00, 1979,.(54)(57) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯПРИВОДОМ ХЛОПКООЧИСТИТЕЛЬНОЙ МАШИНЫ,.содержащее датчик нагрузки, связанный, с главным приводом машины, сумматор,подключенный входами соответственнок задатчику нагрузки, датчику нагрузки и выходу блока памяти, а выходом -к приводу питающих валиков, о т л и -ч а ю щ е е с я тем, что, с цельюповышения точности управления засчет снижения погрешности определенияфактической нагрузки. оно имеет датчик отключения питающих валиков, датчик выведенного положения рабочейкамеры и элемент И, причем датчикотключения питающих валиков и датчиквыведенного положения рабочей камерыподключены к соответствующим входамэлемента И, соединенного выходом суправляющим входом блока памяти, адатчик нагрузки дополнительно подключен к входу блока памяти.1097724 Изобретение относится к текстильной промышленности, а именно к оборудованию для первичной обработки хлопка.Известно устройство для управления приводом хлопкоочистительной машины, содержащее датчик нагрузки, связанный с главным приводом машины, сумматор, подключенный входами соответственно к задатчику нагрузки, дат О чику нагрузки и выходу блока памяти, а выходом - к приводу питайия валиков 1 .Недостатком известного устройства является пониженная точность управле ния, что определяется неточностью определения фактической нагрузки привода,Цель изобретения - повышение точности управления за счет повышения 2 Оточности определения фактической нагрузки.Указанная цель достигается тем,что устройство для управления приводом хлопкоочистительной машины, содержащее датчик нагрузки, связанный сглавным приводом машины, сумматор,подключенный входами соответственно,к задатчику нагрузки, датчику нагрузки и выходу блока памяти, а выходом -ЗОк приводу питающих валиков, имеетдатчик отключения питающих валиков,датчик выведенного положения рабочейкамеры и элемент И, причем датчикотключения питающих валиков и датчик35выведенного положения рабочей камерыподключены к соответствующим входамэлемента И, соединенного выходом суправляющим входом блока памяти, адатчик нагрузки дополнительно подклю-,чен к входу блока памяти. На чертеже представлена структурная схема устройства.Устройство для управления приводом хлопкоочистительной машины содержит датчик 1 нагрузки, связанный с главным приводом 2 машины, сумматор 3, подключенный входами соответственно к задатчику 4 нагрузки, датчику 1 нагрузки, соединенному с входом блока 50 5 памяти и выходу блока 5 памяти, а выходом - к электроприводу 6 питающих валиков, датчик 7 отключения питающих валиков, датчик 8 выведенного положения рабочей камеры и эле мент 9 И, причем датчики 7 и 8 под- . ключены к соответствующим входам элемента 9 И, выход которого соединен с управляющим входом блока 5 памяти.Устройство работает следующим образом,Подача волокнистого материала производится питающими валиками, приводимыми в действие электроприводом 6.Регулирование частоты вращения питающих валиков производится воздействием на электропрлвод 6 питающих валиков выходным сигналом 3 сумматора 3, На входы сумматора 3 подаются сигналы Х 1 от задатчика 4 нагрузки, Х 2 от датчика 1 нагрузки и ХЗ от блока 5 памяти, в котором хранится информация о нагрузке главного привода 2 в режиме холостого хода. Сумматор 3 в любой момент времени обеспечивает выполнение равенстваЭ =Х 1-(Х 2-ХЗ)До поступления волокнистого материала сигнал от да.чика 1 нагрузки равен сигналу от блока 5 памяти и выходкой сигнал сумматора 3 определяется величиной сигнала Х 1 задания нагрузки, при этом частота вращения питающих валиков максимальна.При поступлении волокнистого материала в рабочую камеру сигнал Х 2 становится отличным от сигнала ХЗ.По мере увеличения нагрузки сигнал Х 2 возрастает, при этом значение результирующего сигнала 7 сумматора 3 уменьшается, соответственно этому уменьшается частота вращения питающих валиков. В момент времени, когда значение сигнала Х 2 становится таким, что Э =О, уменьшение частоты вращения питающих валиков прекращается и указанная частота определяется величиной задающего сигнала Х 1. При увеличении интенсивности исходного потока волокнистого материала сигнал Х 2 от датчика 1 нагрузки возрастает, сигнал 3 становится отрицательным, при этом происходит уменьшение частоты вращения питающих валиков.При уменьшении интенсивности исходного потока волокнистого материала сигнал Х 2 от датчика 1 нагрузки уменьшается, сигнал становится положительным, что вызывает увеличение частоты вращения питающих валиков.При переводе хлопкоочистительной машины в холостой ход срабатывают( датчик 7 выведенного положения рабочей камеры и датчик 8 отключенногоЗаказ 4164/26 Тираж 441 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб , д. 4/5филиал ППП "Патент", г. ужгород," ул, Проектная, 4 3 10977 состояния питающих валиков, Чувствительным органом датчика может быть, например, контакт конечного выключателя положения рабочей камеры, чувствительным органом датчика 8 - блок- контакт пускателя электродвигателя питающих валиков. Выходные сигналы датчиков поступают на входы элемента 9 И, при этом наличие выходного сигнала элемента 9 И однозначно соответ О ствует состоянию холостого хода машины. Выходной сигнал элемента 9 И разрешает запись в блок памяти значения выходного сигнала Х 2 датчика 1 нагрузки, равного в данный момент и"тинному значению сигнала холостого хода.Перевод хлопкоочистительной машины в холостой ход производится периодически в течение всего процесса ра. боты по технологическим причинам: при 2 О прочистке колосников, при замене пил,при опустошении питателя машины, прнрегулировании гребенки, при передаче смены и т.д. Эти моменты исполь"зуютсФ для кбрректировки значенийсигнала холостого хода, осуществляемой автоматически без участия операПри переводе хлопкоочистительноймашины в рабочий режим датчики 7 и8 отключаются, выходной сигнал элемента,9 И становится равным нулю,запрещая запись выходного сигнала Х 2датчика нагрузки в блок памяти, который в рабочем режиме выдает на сумматор 3 скорректированный согласнотекущим условиям, сигнал ХЗ холостого.хода.Экономический эффект от применения изобретения определяется производительностью привода,
СмотретьЗаявка
3471221, 09.07.1982
СПЕЦИАЛЬНОЕ КОНСТРУКТОРСКО-ТЕХНОЛОГИЧЕСКОЕ БЮРО "ТЕХНОПРИБОР"
ФРИДМАН ДАВИД БОРИСОВИЧ, ХАМИДОВ ГЕННАДИЙ КАМАЛОВИЧ, ХОДАСЕВИЧ ЮРИЙ ЛЕОНИДОВИЧ
МПК / Метки
МПК: D01G 23/00
Метки: приводом, хлопкоочистительной
Опубликовано: 15.06.1984
Код ссылки
<a href="https://patents.su/3-1097724-ustrojjstvo-dlya-upravleniya-privodom-khlopkoochistitelnojj-mashiny.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления приводом хлопкоочистительной машины</a>
Способ интерполирования сигнала муарового фотоэлектрического датчика

Номер патента: 334474
Опубликовано: 01.01.1972
МПК: G01B 9/00
Метки: датчика, интерполирования, муарового, сигнала, фотоэлектрического
...от известных тем, что световой поток осветителямодулируют по амплитуде с частотой опорного сигнала, задаваемого независимым генератором, объединенные сигналы фотоприемников подают на логический блок, обеспечивающий смещение сигнала по фазе, на угол, пропорциональный величине линейного смещенияподвижного растра. Об измеряемой величинесудят по разности фаз выходного и опорногосигн алов.Это позволяения.На чертеже приведена схема устройства,реализующего предложенный способ.Способ интерполирования сигнала муаро вого фотоэлектрического датчика заключается в следующем.Подвижный 1 и неподвижныйосвещают модулированным посветовым потоком источника светмого от модулятора 4.Частота модуляции определяется опорнойчастотой сипнала...
Устройство для контроля параметров датчиков телевизионного сигнала

Номер патента: 856029
Опубликовано: 15.08.1981
Авторы: Гурченок, Калявин, Корнильев, Фризюк
МПК: H04L 7/02
Метки: датчиков, параметров, сигнала, телевизионного
...который запускается задним Фронтом и формирует импульс с длительностью не более одного периода тактовых импульсов. Сформированные стробирующиеимпульсы через второй блок 10 запрета прн наличии на другом входе блока10 сигнала с датчика 11 интерваловвремени поступают на вход ффэапись -считыванием,блока 7 памяти. Сигналс датчика 11 интервалов времени, на пример в виде логической ф 1 ф, по. ступающий на вход блока 10 обеспечивает прохождение стробирующего импульса в течение одного цикла работы коммутатора 1, Через определенныемоменты времени, эадаваеьые датчиком11, этот сигнал обеспечивает переклю-.чение блока 7 памяти в режим записи.Запись информации производится вячейку,. определяемую адресными сигналами, поступающими со счетчика...
Способ регулирования нагрузки на нажимной валик питающей пары вытяжного прибора

Номер патента: 1158627
Опубликовано: 30.05.1985
Авторы: Васильев, Гусев, Зимин, Козловский, Осипов, Поляков
МПК: D01H 5/46
Метки: валик, вытяжного, нагрузки, нажимной, пары, питающей, прибора
...комитета СССР по делам изобретений и открытий 113035, Иосква, Ж, Раушская наб д.4/5Филиал ППП "Патент", г. Ужгород, ул, Проектная, 4 3Целью изобретения является повышение точности регулирования путем учета пульсаций линейной скорости пряжи на входе питающей пары вытяжного прибора.На чертеже представлена схема устройства для реализации способа.Устройство содержит нажимной валик 1, который своим эластичным покрытием соприкасается с йоверхностью валика 2 и вследствие их вращения пряжа 3 выбирается из нрядильного устройства 4 и в дальнейшем под натяжением с помощью мотального барабанчика 5 наматывается в бобину 6. Конструкция состоящая из валиков 1 и 2, мотального барабанчика 5 и бобины б, является вытяжным прибором, а конструкция,...
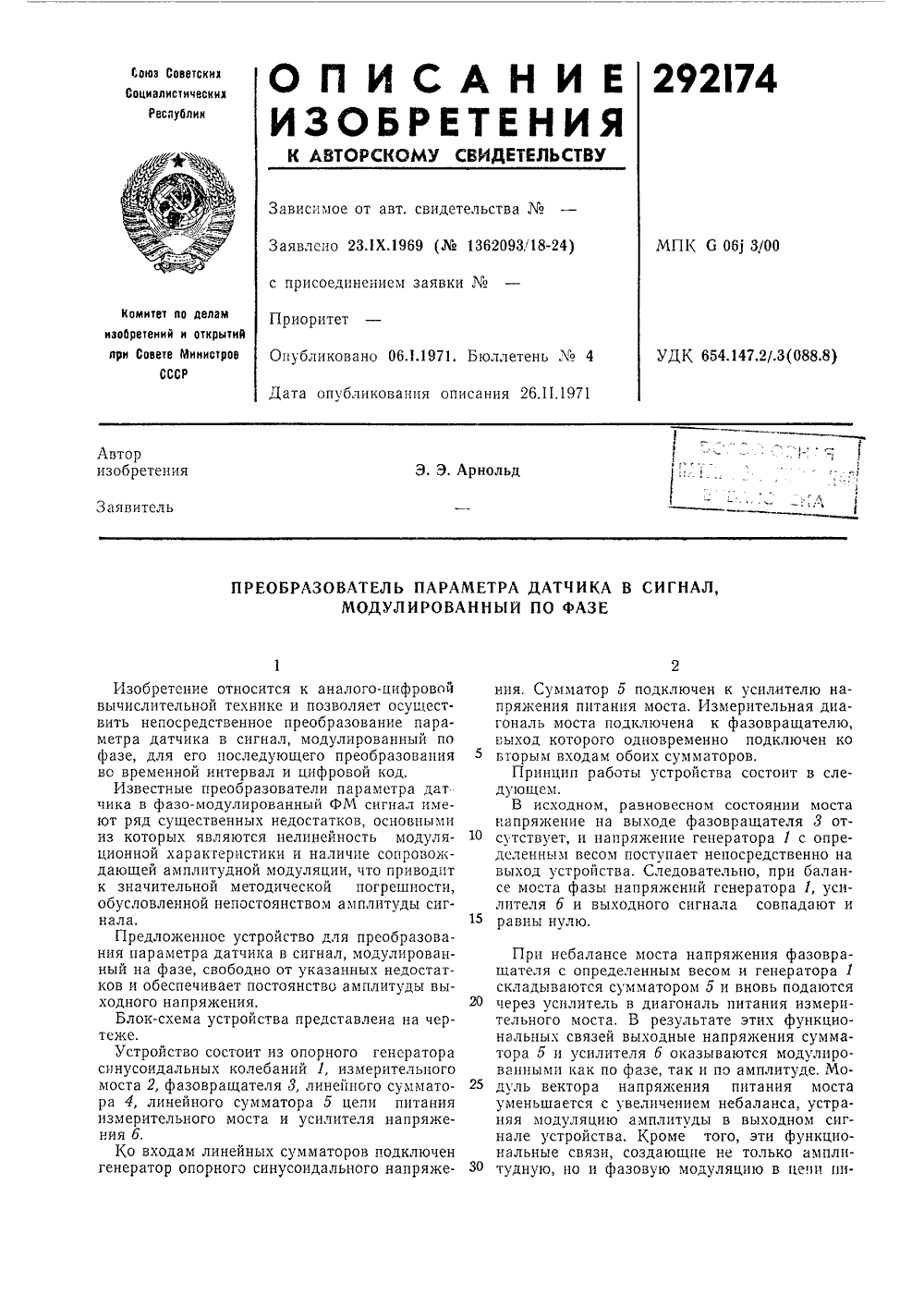
Преобразователь параметра датчика в сигнал, модулированный по фазе
Номер патента: 292174
Опубликовано: 01.01.1971
Автор: Арнольд
МПК: G06J 3/00
Метки: датчика, модулированный, параметра, сигнал, фазе
...исходном, равновесном состоянии мостанапряжение на выходе фазовращателя 3 от сутствует, и напряжение генератора 1 с определенным весом поступает непосредственно на выход устройства. Следовательно, при балансе моста фазы напряжений генератора 1, усилителя б и выходного сигнала совпадают иравны нулю. При небалансе моста напряжения фазовращателя с определенным весом и генератора 1 складываются сумматором б и вновь подаются 20 через усилитель в диагональ питания измерительного моста. В результате этих функциональных связей выходные напряжения сумматора б и усилителя б оказываются модулированными как по фазе, так и по амплитуде. Мо дуль вектора напряжения питания мостауменьшается с увеличением небаланса, устраняя модуляцию амплитуды в...
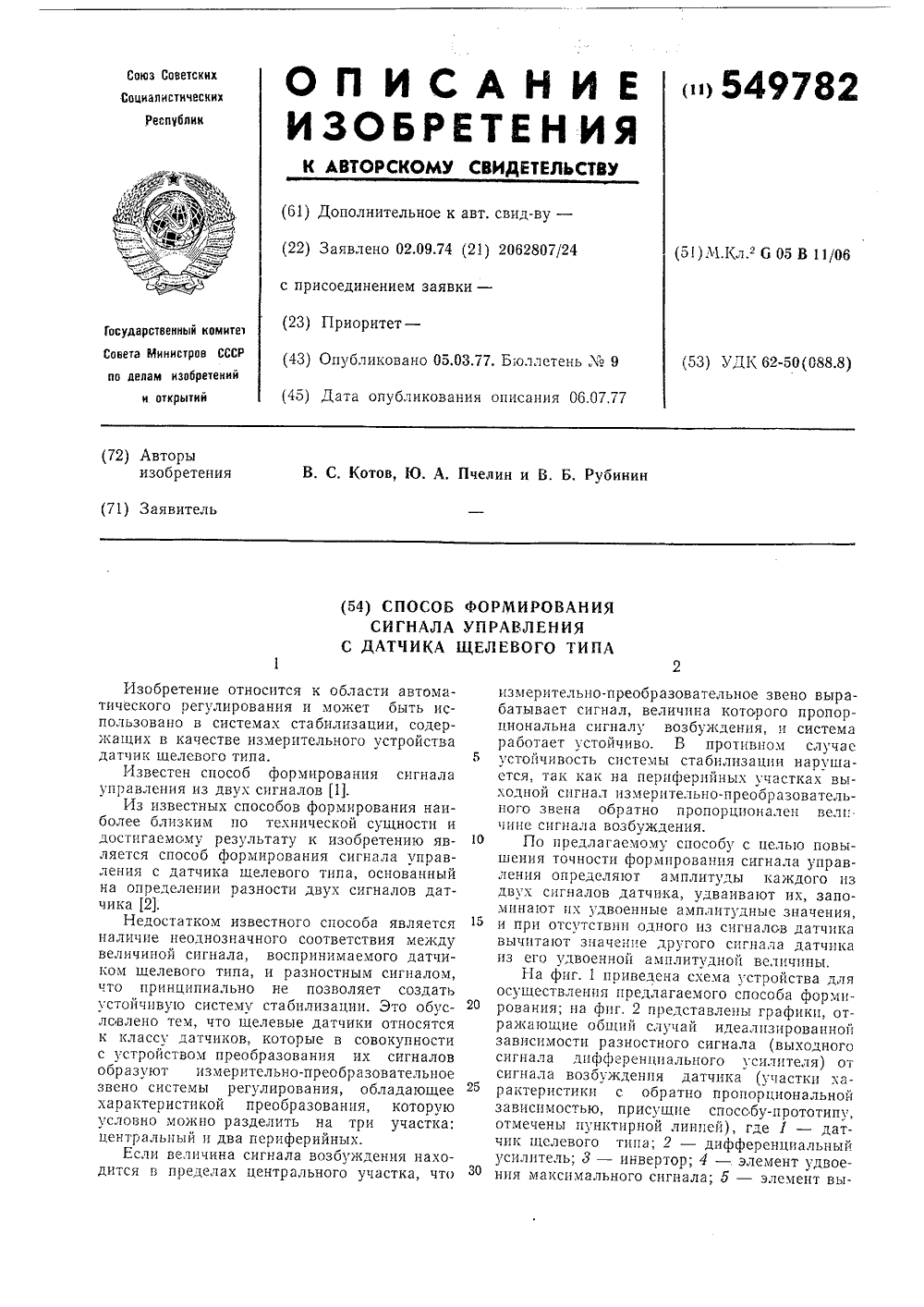
Способ формирования сигнала управления с датчика щелевого типа
Номер патента: 549782
Опубликовано: 05.03.1977
Авторы: Котов, Пчелин, Рубинин
МПК: G05B 11/06
Метки: датчика, сигнала, типа, формирования, щелевого
...датчика (участкп характеристики с обратно пропорциональной зависимостью, присущие споссбу-прототипу, отмечены пунктирной линией), где 1 - датчик щслевого типа; 2 - дифференциальный усилитель; 3 - инвертор; 4 - элемент удвоения максимального сигнала; б - элемент вы549782 йи читания; б - элемент переключения; 7 -элемент формирования логических сигналов;У. - выходной сигнал дифференциальногоусилителя; Ул - сигнал возбуждения датчика.5Предлагаемый способ осуществляется следующим образом.В случае одновременного присутствия сигналов датчика 1 на обоих его выходах последние с помощью элемента переключения б,управляемого элементом формирования логических сигналов 7, подключают ко входамдифференциального усилителя 2, На фиг. 2участок...
Предыдущий патент: Центрифугальная прядильная кружка
Следующий патент: Способ управления прядильной машиной и устройство для его осуществления
Случайный патент: Ротационный распылитель жидкости