Способ контроля подшипников качения по моменту сопротивления вращению
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1049770
Авторы: Зазнобин, Мишнев, Половников

Текст
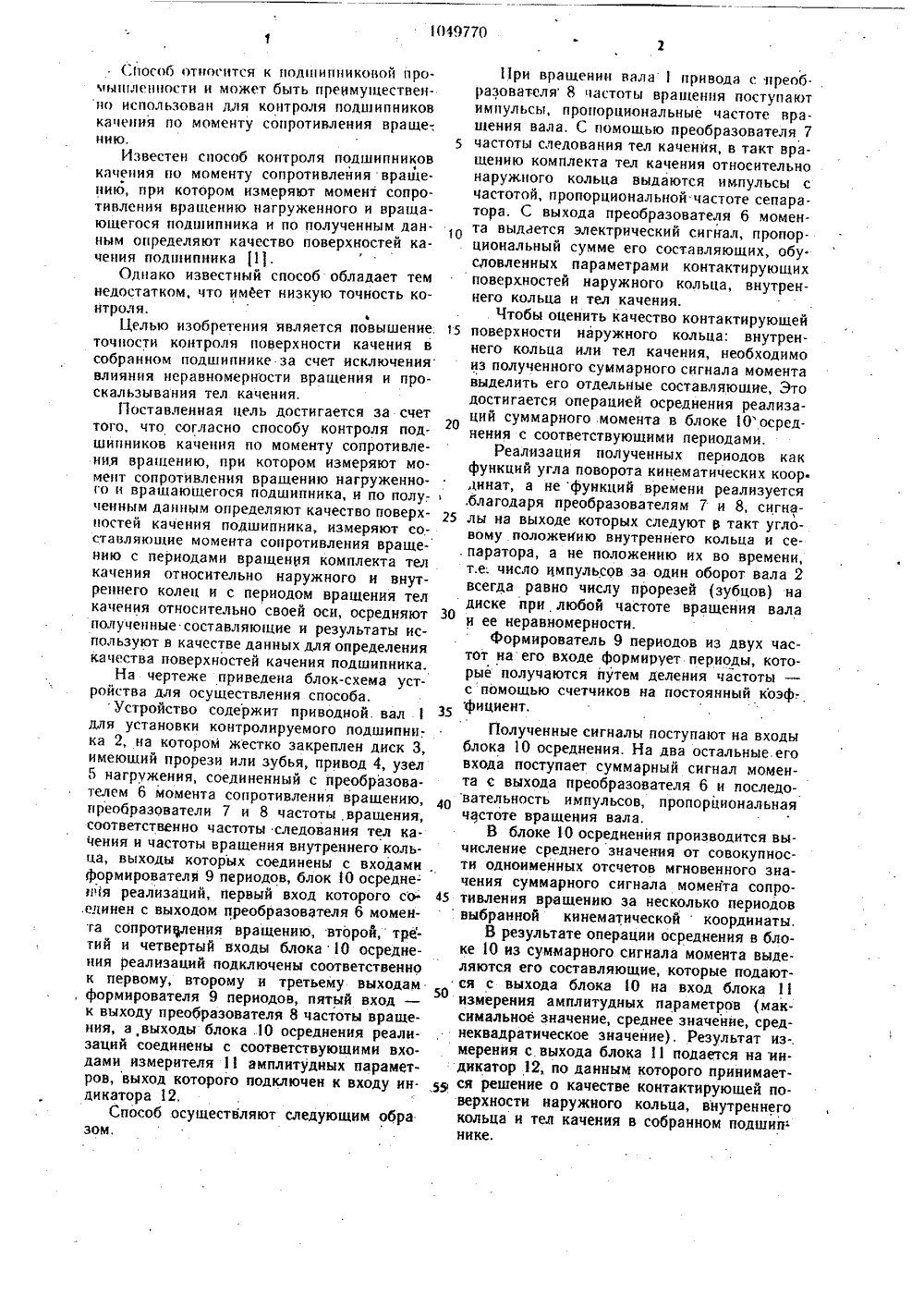
ОЮЗ СОВЕТСНИХ ЦИАЛИСТИЧЕСНИХ ПУБЛИН А 9) О М 13 0 ОПИСАНИЕ ИЗОБРЕТН АВТОРСКОМУ СВИДЕТЕЛЬСТВУ ИЯ ОУДАРСТВЕННЫЙ НОМИТЕТ СССРО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЬГТИЙ(71) Специальное опытное проектно-конструкторско-технологическое бюро Сибирского отделения Всесоюзной ордена Ленина и ордена Трудового Красного Знамени ака-. демии сельскохозяйственных наук им, В. И. Ленина(56) 1, Авторское свидетельство СССР.767601, кл б 01 М 1304, 1980 (прототип), . (54) (57) СПОСОБ КОНТРОЛЯ ПОДШИП-.: НИКОВ КАЧЕНИЯ ПО МОМЕНТУ СОПР 0 ТИВЛЕНИЯ ВРАЩЕНИЮ, при котором измеряют момент сопротивления вращению нагруженного и вращающегося подшипника и по полученным данным определяют качество поверхностей качения подшипника. от,яикаюиийся тем, что, с целью повышения точности контроля поверхности качения в собранном подшипнике за счет исключения влияния неравномерности вращения и проскальзывания тел качения, измеряют состав- ляющие момента сопротивления вращению с периодами вращения комплекта тел качения относительно наружного и внутреннего колец и с периодом вращения тел качения относительно своей оси, осредняют полученные составляющие и результаты используют в качестве данных для определения качества поверхностей качения подшипника.Оособ относится к полшипннкоиой прочьппленности и может быть преимущественно использован для контроля подшипниковкачения по моменту сопротивления враще-,нию.Известен способ контроля подшипниковкачения по моменту сопротивления вращению, при котором измеряют момент сопротивления вращению нагруженного и вращающегося подшипника и по полученным данным определяют качество поверхностей качения подшипника 1,Однако известный способ обладает темнедостатком, что имеет низкую точность контроля.Целью изобретения является повышениеточности контроля поверхности качения всобранном подшипнике за счет исключениявлияния неравномерности вращения и проскальзывания тел качения.Поставленная цель достигается за счеттого, что согласно способу контроля подшипников качения по моменту сопротивления вращению, при котором измеряют момент сопротивления вращению нагруженного и вращающегося подшипника, и по полу.ченным данным определяют качество поверхностей качения подшипника, измеряют составлякгщие момента сопротивления вращению с периодами вращения комплекта телкачения относительно наружного и внутреннего колец и с периодом вращения телкачения относительно своей оси, осредняютполученные составляющие и результаты используют в качестве данных для определениякачества поверхностей качения подшипника.На чертеже приведена блок-схема устройства для осуществления способа.Устройство содержит приводной валдля установки контролируемого подшипника 2, на котором жестко закреплен диск 3,имеющий прорези или зубья, привод 4, узел6 нагружения, соединенный с преобразователем 6 момента сопротивления вращению,преобразователи 7 и 8 частоты вращения,соответственно частоты следования тел качения и частоты вращения внутреннего кольца, выходы которых соединены с входамиформирователя 9 периодов, блок 10 осредне-Мя реализаций, первый вход которого со..единен с выходом преобразователя 6 момента сопротивления вращению, второй, третий и четвертый входы блока О осреднения реализаций подключены соответственнок первому, второму и третьему выходам, формирователя 9 периодов, пятый вход -к выходу преобразователя 8 частоты вращения, а,выходы блока 10 осреднения реализаций соединены с соответствующими входами измерителя 11 амплитудных параметров, выход которого подключен к входу индикатора 12,Способ осуществляют следующим образом.блока 10 осредиения. На два остальные.его входа поступает суммарный сигнал момента с выхода преобразователя 6 и последовательность импульсов, пропорциональная 40 частоте вращения вала. В блоке 10 осреднения производится вычисление среднего значения от совокупности одноименных отсчетов мгновенного значения суммарного сигнала момента сопротивления вращению за несколько периодов 45 выбранной кинематической координаты,В результате операции осреднения в блоке 10 из суммарного сигнала момента выделяются его составляющие, которые подаются с выхода блока О на вход блока 11 измерения амплитудных параметров (максимальное значение, среднее значение, среднеквадратическое значение). Результат из-. мерения с.выхода блока 1 подается на индикатор 12, по данным которого принимается решение о качестве контактирующей поверхности наружного кольца, внутреннего кольца и тел качения в собранном подшип: нике,11 ри вращении валапривода с преоб- .разователя 8 частоты вращения поступакт импульсы, пропорциональные частоте вращения вала. С помощью преобразователя 7 частоты следования тел качения, в такт вращению комплекта тел качения относительно наружного кольца выдаются импульсы с частотой, пропорциональной частоте сепаратора. С выхода преобразователя 6 момен та выдается электрический сигнал, пропорциональный сумме его составляющих, обу.словленных параметрами контактирующих поверхностей наружного кольца, внутреннего кольца и тел качения.Чтобы оценить качество контактирующей 15 поверхности наружного кольца: внутреннего кольца или тел качения, необходимо из полученного суммарного сигнала момента выделить его отдельные составляющие, Это достигается операцией осреднения реализаций суммарного момента в блоке 1 Оосреднения с соответствующими периодами.Реализация полученных периодов какфункций угла поворота кинематических коор.ринат, а не функций времени реализуется .благодаря преобразователям 7 и 8, сигна лы на выходе которых следуют в такт угловому положению внутреннего кольца и се. паратора, а не положению их во времени,т.е; число импульсов за один оборот вала 2 всегда равно числу прорезей (зубцов) надиске при любой частоте вращения валаи ее неравномерности.Формирователь 9 периодов из двух частот на его входе формирует периоды, которые получаются путем деления частоты - с помощью счетчиков на постоянный коэф35 фициентПолученные сигналы поступают на входы049776 Составитель И. Баранов Редактор А. Шандор Техред И. Верес Корректор О Билак Заказ 8404/39 , Тираж 873 Подписное ВНИИ ПИ Государственного комитета СССР по дела и изобретений и от крытийПредложенный способ повышает точ ность, качество контроля за счет исключения влияния, нестабильности частоты вращения, проскальзывания в точках контакта и воз- действия внешних помех, за счет обеспе чения возможности контроля дефектов кон тактирующих поверхностей всех деталей подшипника: наружного кольца, внутреннего кольца, тел качения. Это достигается путем учета движения отдельных деталей подшипника в кинематических координатах функций угла поворота контролируемых деталей.
СмотретьЗаявка
3405486, 12.03.1982
СПЕЦИАЛЬНОЕ ОПЫТНОЕ ПРОЕКТНО-КОНСТРУКТОРСКО-ТЕХНОЛОГИЧЕСКОЕ БЮРО СИБИРСКОГО ОТДЕЛЕНИЯ ВСЕСОЮЗНОЙ ОРДЕНА ЛЕНИНА И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ АКАДЕМИИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ НАУК ИМ. В. И. ЛЕНИНА
ЗАЗНОБИН АНАТОЛИЙ МИХАЙЛОВИЧ, МИШНЕВ ВИКТОР ИВАНОВИЧ, ПОЛОВНИКОВ СЕРГЕЙ ВЛАДИМИРОВИЧ
МПК / Метки
МПК: G01M 13/04
Метки: вращению, качения, моменту, подшипников, сопротивления
Опубликовано: 23.10.1983
Код ссылки
<a href="https://patents.su/3-1049770-sposob-kontrolya-podshipnikov-kacheniya-po-momentu-soprotivleniya-vrashheniyu.html" target="_blank" rel="follow" title="База патентов СССР">Способ контроля подшипников качения по моменту сопротивления вращению</a>
Устройство для шлифования наружных поверхностей вращения, преимущественно, желобов внутренних колец подшипников качения

Номер патента: 542627
Опубликовано: 15.01.1977
Автор: Пилипчик
МПК: B24B 19/06
Метки: внутренних, вращения, желобов, качения, колец, наружных, поверхностей, подшипников, преимущественно, шлифования
...1,соединенный с ним через сменные шестерни и 5 червячную пару вал 2, на котором установленбарабан 3, имеющий приводные шпинделя 4.Электродвигатель 5 служит для привода шпинделей 4 вместе с обрабатывающими кольцами 6. Шлифовальный круг 7 закреплен в обхваты- О вающей планшайбе 8, которая крепится нашпинделе 9. Ось вращающегося барабана 3 смещена относительно оси шпинделя 9 на величину Н, которая должна быть больше половины глубины обработанного желоба. Шпин деля 4 установлены в эксцентричных гильзах 10.Работает устройство следующим образом.Обрабатываемое кольцо 6 устанавливаютна шпиндель 4, базируя его по торцу и отвер стию кольца, например, на неподвижные опоры. Барабан 3 вращается непрерывно. Встреча кольца с кругом происходит...
Устройство для хонингования наружных поверхностей тел вращения

Номер патента: 296639
Опубликовано: 01.01.1971
Авторы: Гуревич, Кузьмичев, Лукь, Редько
МПК: B24B 33/04
Метки: вращения, наружных, поверхностей, тел, хонингования
...Суппорты 2 и 3 снабжены кронштейнами 9, которые вместе с шариковыми направляющими 10 могут быть установле-. ны параллельно оси изделия 7 (при обработке цилиндрических поверхностей) или под требуемым углом (при обработке конических поверхностей) за счет поворота на штифтах 11 с последующей фиксацией гайками.В направляющих 10 смонтированы каретки 12, несущие абразивные бруски 13, Кареткам может быть сообщено в направляющих 10 асцилирующее движение от двуплечего рычага 14 через планку 15, имеющую паз, в который входят пальцы 16, жестко связанные с каретками. Двуплечий рычаг 14, установленный на оси 17, несет колодку 18 с пазом для эксцентрика 19 и предназначен для сообщения асцилирующего движения абразивным брускам 13. Эксцентрик сидит на...
Способ определения сил сопротивления движению тела в сыпучем потоке и устройство для его осуществления

Номер патента: 1781567
Опубликовано: 15.12.1992
Авторы: Сергет, Сердюченко, Хаустов, Шишкин
МПК: G01L 5/00, G01N 11/00
Метки: движению, потоке, сил, сопротивления, сыпучем, тела
...определения сил сопротивления движению тела в сыпучем потоке, при котором на вертикально противления движению тела в сцпучемподвешенное тело воздействуют потоком 10сыпучего материала, движущимся под действием собственного веса, непрерьвно регйстрируют воздействуащие на тело силы ипо ним определяютсилы сопротивлениядвижению тела в сыпучем потоке.Устройство,с помощью которого реализуется указанным способ определения силсопротивления движению тела в сыпучемпотоке содержит раму с бункером, силоизмерительный датчик, закрепленный над 20бункером на раме, тело, вертикально подвешенное к силоизмерительному датчику, ирегистриру.ощий прибор, подключенный коилоизмерительному датчику; самописца,Недостатком известного способа определения сил...
Люнет

Номер патента: 1202780
Опубликовано: 07.01.1986
Авторы: Белик, Красников, Муравлев, Сорокин
МПК: B23Q 1/76
Метки: люнет
...10 электромагнитапостоянного тока, обеспечивающегопередвижение клиньев 7 и жесткоеудержание обрабатываемой детали 8при работе люнета,В кольцо 5 ввернуты шпильки 11, на которых установлена шайба 12, зафиксированная в осевом направлении гайками 13, между шайбой и клиньями 7 установлены пружины 14 растяжения.Устройство работает следующим образом.Центровой держатель устанавливается на обрабатываемую деталь 8. Поскольку внутренние поверхности корпуса 1 люнета и опорного кольца 5 выполнены соосно со шпикделем не показан) станка, достаточно по ним сцентрировать обрабатываемую деталь 8 в центровом держателе, чтобы ока стала соосной со шпинделем станка. Для этого с помощью опорного кольца 5 и устанавливаемых в него клиньев 7 собирается...
Устройство для снятия заусенцев с вкладышей подшипников скольжения и очистки их наружной поверхности

Номер патента: 1297994
Опубликовано: 23.03.1987
Автор: Новиков
МПК: B23B 5/16
Метки: вкладышей, заусенцев, наружной, поверхности, подшипников, скольжения, снятия
...установлен на плите 2 станины 1, В шпинделе 27 соосно ему выФполнено отверстие 31, через которое пропущен узел подачи и кантования деталей. На правом торце шпинделя 27 выполнены радиальные пазы, в которых установлены держатели 32 стальных щеток 33, Положение держа994 4трвдвигатели 21 механизма снятия заусенцев, При этом шибер 7 штоком 9 силового цилиндра 8 перемещается в правое крайнее положение, а собачки 12 заскакивают за переднюю деталь 3, находящуюся на шибере 7. Силовой цилиндр 8 переключается на обратный ход. При этом шибер 7 перемещается в левое крайнее положение и перемещает переднюю деталь 3 под крышку 6, сжимая ее пружину 10, а следующие детали 3 самотеком перемещаются до упора в первую деталь 3. При последующих...
Предыдущий патент: Стенд для испытания ленточного тягового органа подъемника
Следующий патент: Устройство для вибрационной диагностики кинематических пар трения в механизмах
Случайный патент: Всесоюзная