Система управления процессом бурения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
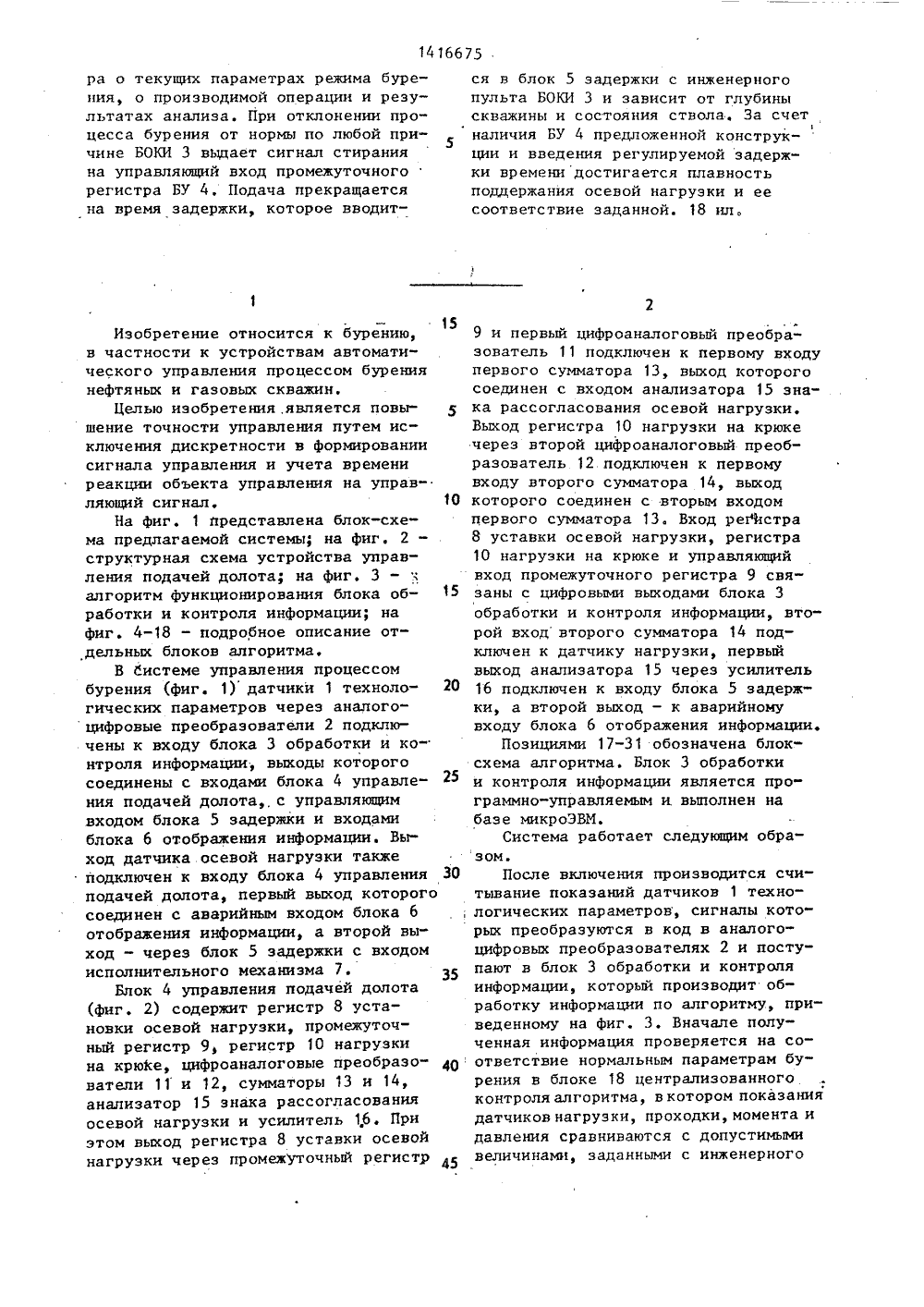
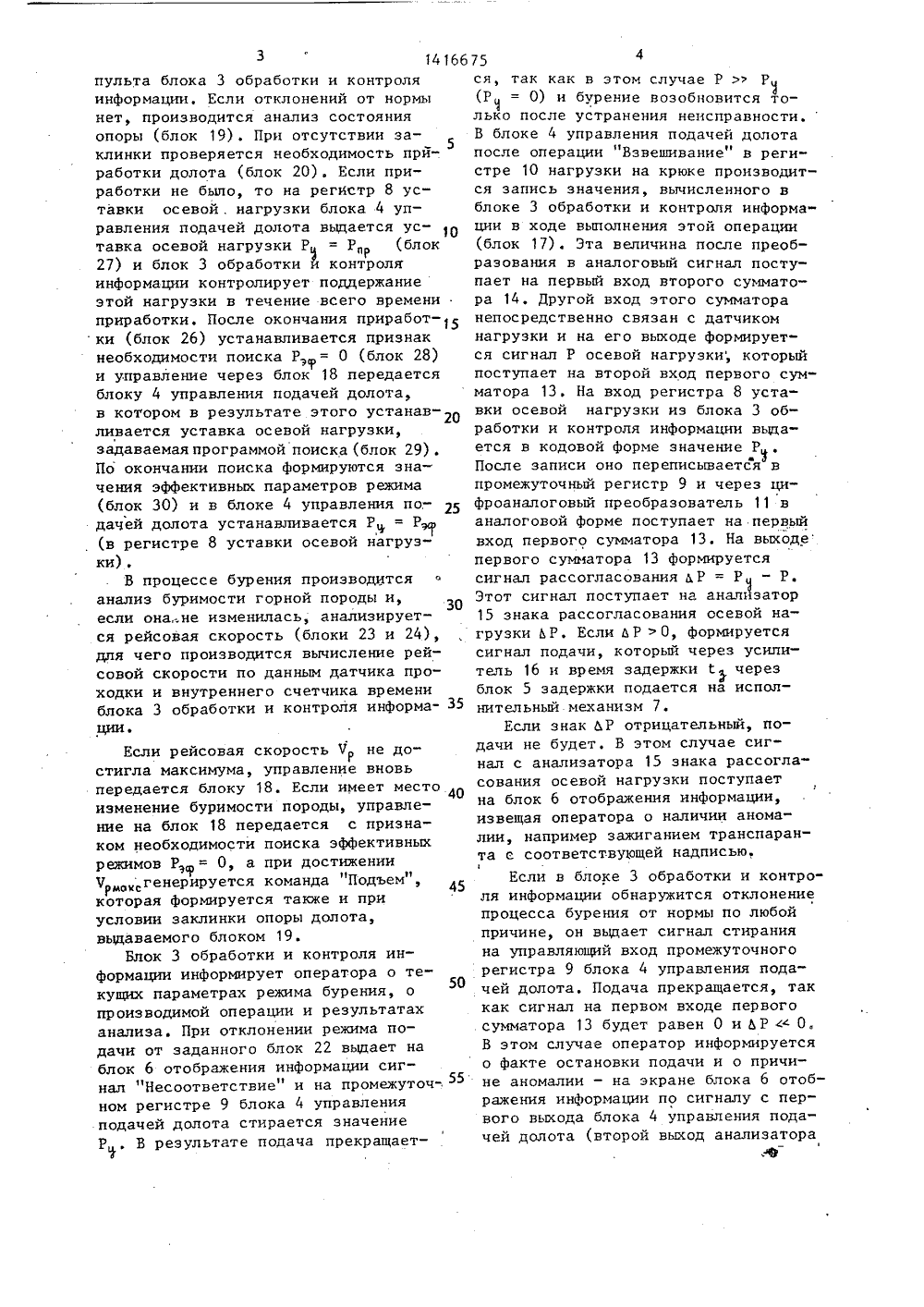
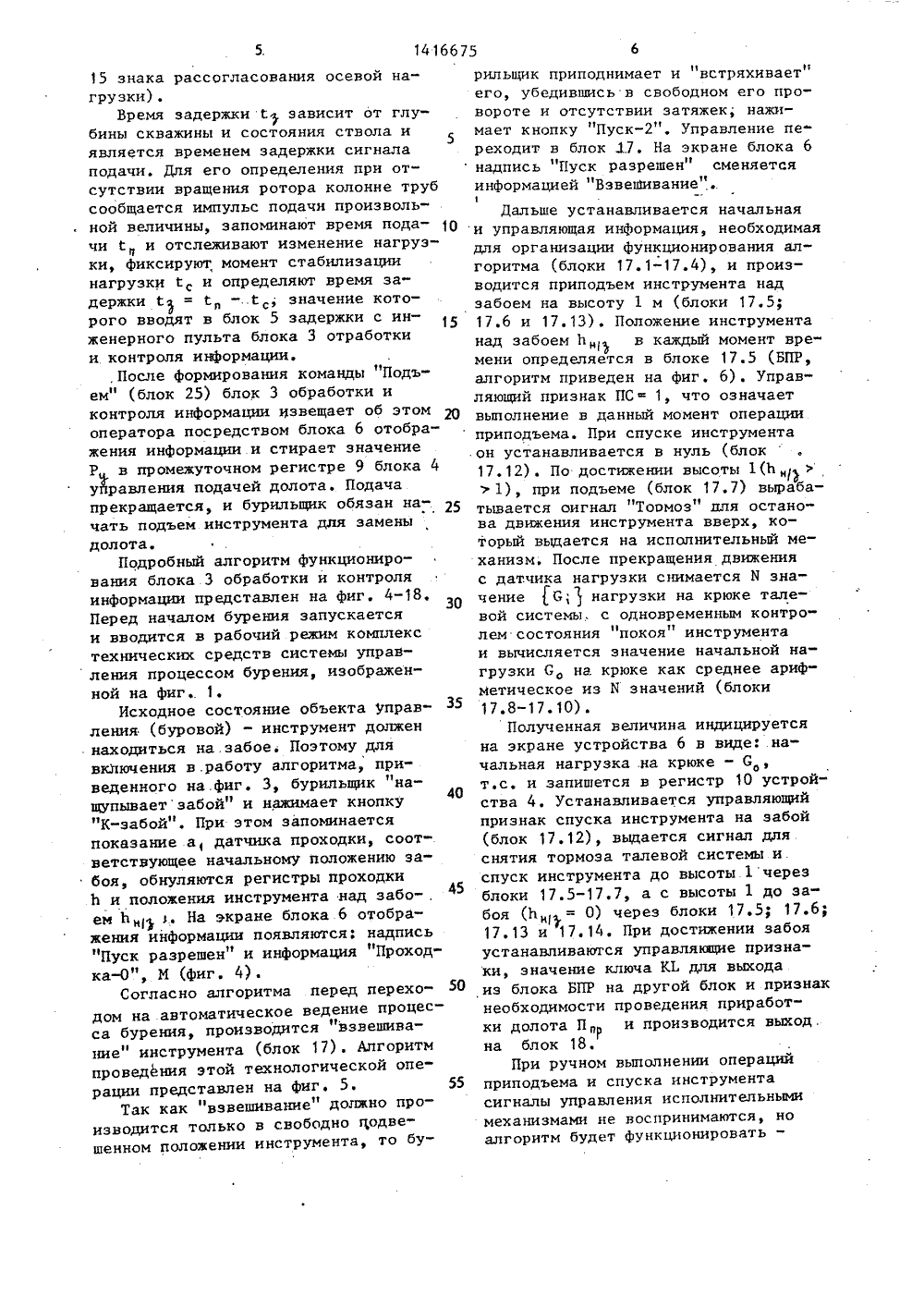
(51) 1 В 44 Е ИЗОБРЕТЕ Н АВТОРСКОМУ СВИДЕТЕЛЬСТВУ 063820/22-089.04.86 терский В.М.рения с привтоматизацияной промыш 9 2, 1982,(54) СИСТЕМАБУРЕНИЯ (57) Изобрете цессом бурен скважин. Цель ПРОЦЕССОМ упр авленияости в форния и учетауправления ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ(71) Всесоюзный научно-исследователь ский и проектно-конструкторский институт нефтяного машиностроения (72) Э.А. Айзуппе, В.Н. Гусев, Д.А. Мишунин и Р,А. Ялалдинов (53) 622.233.056(088.8)(56) Кулишенко В.А., ПиУправление процессом буменением ЭВМ. - РНТС "Аи телемеханизация нефтяленности" М.: ВНИИОЭНГс. 16-18Авторское свидетельство СССР У 1002543, кл. Е 21 В 44/00, 1980. ние относится к САУ проня нефтяных и газовых- повышение точности тем исключения дискретровании сигнала управлеремени реакции объектауправляющий сигнал,Для этого СУ снабженаблоком 5 задержки и блоком управления (БУ) 4 подачей долота. На вход БУ 4 поступаютсигналы с датчиков 1 технологическихпараметров и с выхода соединенного сдатчиками 1 через АЦП 2 блока обработки и контроля информации (БОКИ) 3,С других выходов БОКИ 3 и с выходовБУ 4 сигналы поступают на входы блока 6 отображения информации и блока5 задержки. Выход блока 5 задержкисоединен с входом исполнительногомеханизма 7. При этом БУ 4 выполненв виде последовательно соединенныхрегистра уставки осевой нагрузки,промежуточного регистра и первогоЦАП, выход которого соединен с первымвходом первого сумматора, а такжерегистра нагрузки на крюке, выходкоторого через второй ЦАП соединенс входом второго сумматора. Сигналс выхода второго сумматора поступаетна второй вход первого сумматора, свыхода которого через последовательно соединенные анализатор и усилитель поступает на вход блока 5 задержки, БОКИ 3 информирует операто 141 6675 18блока обработки и контроля информации подключен. к первому входу блока отображения информации, второй, тре. тий и четвертый - к входу регистра уставки осевой нагрузки, к управляющему входу промежуточного регистра и к входу регистра нагрузки.на крюке 1 соответственно, а пятый - к управляющему входу блока задержки,причем второй выход анализатора знака рассогласования осевой нагрузкисоединен с аварийным входом блокаотображения информации, а выход усилителя через блок задержки подключен к входу исполнительного механизма.1416675 15 5 10 25 30 35 ра о текущих параметрах режима бурения, о производимой операции и результатах анализа. При отклонении процесса бурения от нормы по любой причине БОКИ 3 выдает сигнал стирания на управляющий вход промежуточного регистра БУ 4. Подача прекращается на время задержки, которое вводитИзобретение относится к бурению,в частности к устройствам автоматического управления процессом бурениянефтяных и газовых скважин.Целью изобретения, является повышение точности управления путем исключения дискретности в Формированиисигнала управления и учета времениреакции объекта управления на управляющий сигнал.На фиг. 1 представлена блок-схема предлагаемой системы, на фиг. 2 - структурная схема устройства управления подачей долота; на фиг. 3 - алгоритм функционирования блока обработки и контроля информации; на фиг. 4-18 - подробное описание отдельных блоков алгоритма.В системе управления процессом бурения (фиг. 1) датчики 1 технологических параметров через аналогоцифровые преобразователи 2 подключены к входу блока 3 обработки и контроля информации, выходы которого соединены с входами блока 4 управления подачей долота с управляющим входом блока 5 задержки и входами блока 6 отображения информации. Выход датчика осевой нагрузки также подключен к входу блока 4 управления подачей долота, первый выход которого соединен с аварийным входом блока 6 отображения информации, а второй выход - через блок 5 задержки с входом исполнительного механизма 7Блок 4 управления подачей долота (фиг. 2) содержит регистр 8 установки осевой нагрузки, промежуточный регистр 9, регистр 10 нагрузки на крюке, цифроаналоговые преобразователи 11 и 12, сумматоры 13 и 14, анализатор 15 знака рассогласования осевой нагрузки и усилитель 16, При этом выход регистра 8 уставки осевой нагрузки через промежуточный регистр ся н блок 5 задержки с инженерного пульта БОКИ 3 и зависит от глубины скважины и состояния ствола. За счетналичия БУ 4 предложенной конструкции и введения регулируемой задержки времени достигается плавность поддержания осевой нагрузки и ее соответствие заданной. 18 ил. 29 и первый цифроаналоговый преобразователь 11 подключен к первому входу первого сумматора 13, выход которого соединен с входом анализатора 15 знака рассогласования осевой нагрузки. Выход регистра 10 нагрузки на крюке через второй цифроаналоговый преобразователь 12 подключен к первому входу второго сумматора 14, выход которого соединен с вторым входом первого сумматора 13. Вход регистра8 уставки осевой нагрузки, регистра10 нагрузки на крюке и управляющийвход промежуточного регистра 9 связаны с цифровыми выходами блока 3обработки и контроля информации, второй вход второго сумматора 14 подключен к датчику нагрузки, первыйвыход анализатора 15 через усилитель16 подключен к входу блока 5 задержки, а второй выход - к аварийному входу блока 6 отображения информации.Позициями 17-31 обозначена блоксхема алгоритма. Блок 3 обработки и контроля информации является программно-управляемым и выполнен на базе микроЭВМ.Система работает следующим образом. После включения производится считывание показаний датчиков 1 технологических параметров, сигналы которых преобразуются в код в аналогоцифровых преобразователях 2 и поступают в блок 3 обработки и контроляинформации, который производит обработку информации по алгоритму, приведенному на фиг. 3, Вначале полученная информация проверяется на со 40 ответствие нормальным параметрам бурения в блоке 18 централизованногоконтроля алгоритма, в котором показаниядатчиков нагрузки, проходки, момента идавления сравниваются с допустимымивеличинами, заданными с инженерного1416675 оставитель В. Шиловехред Л,Олейник Корре Н, Кор Редактор Ю, Серед Заказ 4450 Тираж 5 исное ВНИИПИ Государственного комитета СС по делам изобретений и открытий113035, Москва, Ж, Раушская наб., д Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектн3 14166 пульта блока 3 обработки и контроля информации. Если отклонений от нормы нет, производится анализ состояния опоры (блок 19) . При отсутствии заклинки проверяется необходимость прйработки долота (блок 20), Если приработки не было, то на регистр 8 уставки осевой . нагрузки блока 4 управления подачей долота выдается ус 0 тавка осевой нагрузки Р = Р (блок 27) и блок 3 обработки и контроля информации контролирует поддержание этой нагрузки в течение всего времени приработки. После окончания приработ ки (блок 26) устанавливается признак необходимости поиска Р = 0 (блок 28) и управление через блок 18 передается блоку 4 управления подачей долота, в котором в результате этого устанавливается уставка осевой нагрузки, задаваемая программой поиска (блок 29) . По окончании поиска формируются значения эффективных параметров режима (блок 30) и в блоке 4 управления по. - дачей долота устанавливается Рч = Р (в регистре 8 уставки осевой нагрузки) .В процессе бурения производится анализ буримости горной породы и, если она,.не изменилась, анализируется рейсовая скорость (блоки 23 и 24), для чего производится вычисление рейсовой скорости по данным датчика проходки и внутреннего счетчика времени блока 3 обработки и контроля информа ции еЕсли рейсовая скорость Ч не доРстигла максимума, управление вновьпередается блоку 18, Если имеет место 4изменение буримости породы, управление на блок 18 передается с признаком необходимости поиска эффективных режимов Р = О, а при достиженииЧюсгенерируется команда Подъем, 45 которая формируется также и приусловии заклинки опоры долота,выдаваемого блоком 19.Блок 3 обработки и контроля информации информирует оператора о те 50 кущих параметрах режима бурения, о производимой операции и результатах анализа. При отклонении режима подачи от заданного блок 22 вьщает на блок 6 отображения информации сигнал "Несоответствие" и на промежуточ ном регистре 9 блока 4 управленияподачей долота стирается значениеР . В результате подача прекращает 754ся, так как в этом случае РР(Р = 0) и бурение возобновится только после устранения неисправности.В блоке 4 управления подачей долотапосле операции Взвешивание" в регистре 10 нагрузки на крюке производится запись значения, вычисленного вблоке 3 обработки и контроля информации в ходе выполнения этой операции(блок 17) . Эта величина после преобразования в аналоговый сигнал поступает на первый вход второго сумматора 14, Другой вход этого сумматоранепосредственно связан с датчикомнагрузки и на его выходе формируется сигнал Р осевой нагрузки, которыйпоступает на второй вход первого сумматора 13. На вход регистра 8 уставки осевой нагрузки из блока 3 обработки и контроля информации выдается в кодовой форме значение РПосле записи оно переписывается впромежуточный регистр 9 и через цифроаналоговый преобразователь 11 ваналоговой форме поступает на первыйвход первого сумматора 13. На выходепервого сумматора 13 формируетсясигнал рассогласования дР = Р - Р.Этот сигнал поступает на анализатор15 знака рассогласования осевой нагрузки ЬР, Если ьР О, формируетсясигнал подачи, который через усилитель 16 и время задержкичерезблок 5 задержки подается на исполнительный механизм 7.Если знак ЬР отрицательный, подачи не будет. В этом случае сигнал с анализатора 15 знака рассогласования осевой нагрузки поступаетна блок 6 отображения информации,извещая оператора о наличии аномалии, например зажиганием транспаранта е соответствующей надписью,(Если в блоке 3 обработки и контроля информации обнаружится отклонениепроцесса бурения от нормы по любойпричине, он вьщает сигнал стиранияна управляющий вход промежуточногорегистра 9 блока 4 управления подачей долота, Подача прекращается, таккак сигнал на первом входе первогосумматора 13 будет равен 0 и Ь Р ( О,В этом случае оператор информируетсяо факте остановки подачи и о причине аномалии - на экране блока 6 отображения информации по сигналу с первого выхода блока 4 управления подачей долота (второй выход анализатора495 10 15 25 30 35 40 45 50 55 15 знака рассогласования осевой нагрузки).Время задержки С зависит от глубины скважины и состояния ствола иявляется временем задержки сигналаподачи. Для его определения при отсутствии вращения ротора колонне трубсообщается импульс подачи произвольной величины, запоминают время подачи 1 и отслеживают изменение нагруэки, фиксируют момент стабилизациинагрузки г. и определяют время задержки С = С - .й , значение которого вводят в блок 5 задержки с инженерного пульта блока 3 отработкии контроля информации., После формирования команды "Подьем" (блок 25) блок 3 обработки иконтроля информации извещает об этомоператора посредством блока 6 отображения информации и стирает значениеР в промежуточном регистре 9 блока 4уйравления подачей долота. Подачапрекращается, и бурильщик обязан начать подъем инструмента для заменыдолота.Подробный алгоритм функционирования блока 3 обработки и контроляинформации представлен на фиг, 4-18,Перед началом бурения запускаетсяи вводится в рабочий режим комплекстехнических средств системы управления процессом бурения, изображенной на фиг. 1.Исходное состояние объекта управления (буровой) - инструмент долженнаходиться на.забое. Поэтому длявкЛючения в.работу алгоритма, приведенного на.фиг. 3, бурильщик "нащупываетзабой" и нажимает кнопку"К-забой". При этом запоминаетсяпоказание а датчика проходки, соответствующее начальному положению забоя, обнуляются регистры проходкиЬ и положения инструмента над забо-,еи Ьиб На экране блока 6 отображения информации появляются: надпись"Пуск разрешен" и информация "Проходка", М (фиг. 4).Согласно алгоритма перед переходом на автоматическое ведение процесееса бурения, производится взвешивание" инструмента (блок 17) . Алгоритм проведения этой технологической операции представлен на фиг. 5.Так как "взвешивание" должно производится только в свободно подвешенном положении инструмента, то бурильщик приподнимает и "встряхивает"его, убедившись в свободном его провороте и отсутствии затяжек, нажимает кнопку "Пуск". Управление переходит в блок 17. На экране блока 6надпись "Пуск разрешен" сменяетсяинформацией Взвешивание,Дальше устанавливается начальнаяи управляющая информация, необходимаядля организации функционирования алгоритма (блоки 17.1-17,4), и производится приподъем инструмента надзабоем на высоту 1 м (блоки 17.5;17,6 и 17.13), Положение инструментанад забоем Ь в каждый момент времени определяется в блоке 17.5 (БПР,алгоритм приведен на фиг. 6). Управляющий признак ПС 1, что означаетвыполнение в данный момент операцииприподъема. При спуске инструментаон устанавливается в нуль (блок17. 12) . По достижении высоты 1(Ь)1), при подъеме (блок 17.7) вырабатывается сигнал "Тоомоз" для останова движения инструмента вверх, который вьдается на исполнительный механизм. После прекращения движенияс датчика нагрузки снимается И значение 1 С;нагрузки на крюке талевой системы, с одновременным контролем состояния "покоя" инструментаи вычисляется значение начальной нагрузки Со на крюке как среднее арифметическое из И значений (блоки17.8-17.10).Полученная величина индицируется на экране устройства 6 в виде:.начальная нагрузка .на крюке - С , т.с. и запишется в регистр 10 устройства 4. Устанавливается управляющий признак спуска инструмента на забой (блок 17.12), вьдается сигнал для снятия тормоза талевой системы и. спуск инструмента до высоты 1 через блоки 17.5-17.7, а с высоты 1 до забоя (Ь = 0) через блоки 17,5; 17.6;17. 13 и 17. 14 . При достижении забоя устанавливаются управлякицие признаки, значение ключа К 1. для выхода из блока БПР на другой блок и признак необходимости проведения приработки долота П и производится выход. на блок 18.При ручном выполнении операций приподъема и спуска инструмента сигналы управления исполнительными механизмами не воспринимаются, но алгоритм будет функционировать -707, то вырабатывается сигнал "За- клинка" опоры (П = 1) и управление передается на блок 25 для подъема инструмента (блоки 18,39; 19; 18.40).Если количество информации К об износе опоры меньше (0,7-М), управление передается на блок 20, который получает управление непосредственно без анализа до появления первого признака износа опоры (блоки 18,32,и 18,33 и ш = О).Организация вычисления опорного момента М производится в блоках 18.21 - 18.30, 18,34, 18.35 и 18,36.Блоки 20, 26 и 27 (фиг. 3) являются узловыми в алгоритме приработки . долота, приведенного на фиг. 11. В блоке 20 анализируется признак П .представляющийсобой булевскую пере менную:1, если нужно выполнить операцию П = приработкиО, если она выполнена.Итак при П = 0 управление передается блоку 21 (фиг. 3), в противном же случае (П =. 1) выполняется алгоритм приработки долота. Суть этой операции заключается в выполнении процесса бурения с некоторой заданной осевой нагрузкой Р в течение установленного времениВеличина Р зависит от типораз" мера долота. Например, для долот диаметром 269 мм типа ГНУ Р =100 кН,В связи с управлением операцией поддержания осевой нагрузки блоком 4 (фиг., 1) на алгоритм возложены две функции: контроль за работой блока 4 управления подачей долота и контроль за продолжительностью приработки. Эти функции выполняются следующим образом.При первоначальном обращении к алгоритму (П = О, блок 20.1) устанавливается нагрузка приработки Р 45"Р (блок 27, Фиг 3), которая одновременно выдается на регистр 8 устройства 4, подготавливается вспомогательная информация (блоки 20.2 - 20.7) и фиксируется время начала 50 приработки й (блок 20.8). При последующих прохождениях (П = 1) этот участокалгоритма обходится. Текущее время приработки С , вычисленное в блоке 20,9, сравнивается со време нем, кратным времени реакции бурильной колонны С на управляющее воздействие (блок 20. 11). Это позволяет испольэовать в блоке контроля за упРавлением поддержания нагрузки (БКУП)(блок 20. 15) достаточно близкую кРосевую нагрузку Р, полученную после того, как сигнал реакции от долота достигнет поверхности, и тем самым обеспечит устойчивость работыблока 3 (фиг. 1). Однако для этогонеобходима синхронизация управляющего воздействия на инструмент и началаработы блока контроля в этом алгорит,ме по времени с . что достаточно трудно.УТак как времМ прохождения одногоцикла всего алгоритма значительноменьше, чем 1, то данная проблема с достаточной для практики точностьюразрешается использованием в блоке2015 вместо Р некоторого среднего значения осевой нагрузки Р вычисР фсленного из К значений Р, полученных за время С 1 (блоки 20.9 -20.14). Итак если времяне вышло, то в счетчик К добавляется единица и управление передается в блок 18, иначе определяется очередная кратность времени Т в интервале времениприработки 0,(блок 20,13), и вычисляется среднее значение осевой нагрузки Рс . Если время приработки, равное , вышло (блок 26), то устанавливается признак поиска эффективной нагрузки Рэ (блок 28, Рэ = .0), признак, что приработка прошла (блок 28.1) и управление передается в блок 21 через блоки 18, 19 и 20. В противном случае, т.е. когда необходимо продолжить приработку, на устройство 6 выдается текущее время приработки, производится обращение к блоку 20.15 для выполнения функции контроля и выход из него в точку Т, по ключу К если в результате анализа не установлено отклонение в работе устройства 4 по управлению поддержания нагрузки и передача управления на начало блока 18 для повторения следующего цикла выполнения алгоритма.Алгоритм функционирования блока 20.15 (Фиг. 12) основан на накоплении информации о работе устройства 4 путем косвенного установления Фактов рассогласования между осевой нагруз-, кой Р и установленной - Р, превышающих величину с . допуск Я задается, при наличии рассогласования вычисляется его величина и общее количество случая рассогласования К, Если оно больше 507, от общего числа1416675 проведенного анализа Куу то на устройство 6 выдается информация "Несоответствие" и на промежуточном регистре 8 устройства 4 стирается зна 5 чение Рм . В результате подача прекращаетсяу так как в этом случае РР (Р = 0) и производитс 11 переход в режим ожидания "БСор", Бурение возобновится нажатием кнопки "Пуск" (фиг. 4) после устранения неисправности.В случае отсутствия рассогласования осуществляется выход из блока по состоянию ключа К, в точки Т; общего алгоритма.В блоках 21, 30, 29 и 31 организуется и проводится анализ входной информации и поиск эффективных значений режимных параметров и установка их в регистры уставок устройств управления,Алгоритм функционирования этих блоков приведен на фиг. 13, который представлен как единое цельное и на чинается с блока 21, где анализируется необходимость поиска эффективной нагрузки. Если Р Ф О, то управление передается на блок 22. В противном случае организуется и проводится 30 поиск эффективной нагрузки Р . Алгоритм поиска на фиг3 обозначен блоком 29. Процесс поиска ведется следующим образом. При первоначальном обращении к ал горитму (П = О, блок 29.1) устанавливается значение ключа К, для выхода из блока БКУП и анализируется вид поиска (блок 29.3) . Если поиск проводится для твердой породы (Поискск 1), 40 то увеличивается значение уставоч-. ной нагрузки Р на величину арс (нагружение на ст пень, ЬРс - нагрузка ступени), которое одновременна надеется на регистр 8.устройства 4, и срав нивается с максимально допустимым значением нагрузки на долото Р Если Р ь Р, то за эффективную нагрузку берется Р,(блок 29.8), В противном случае контролируется 50 установление устройством 4 нагрузки Р (блок БКУП), Если она не устаноувлена (П = О, блок 29.12), то производится контроль установления через блоки 18 и 29.4 (П 0 = 1). Как только нагрузка Р установится (П1), производитс бурение с этой нагрузкой в течение времени , (блоки 29.1, 29.20 и 29.21). Перед началом бурения значение осевой нагрузки, равное Р , запоминается в регистре Р а время начала операции в(блоки 29 . 13 и 29 . 14), По истече нии времениопределяется величина изменения первоначального значения установленной осевой нагрузки (блок 29.22), вычисляется удельная проходка Ьи сравнивается с предыдущим значением удельной проходкиполученным при предыдущем нагружении на ступень, т.е, проверяется конец поиска (блоки 29.23, 29,24, 30). При увеличении удельной проходки (6 Ь0) запоминается Ь (блок 29.26) и процесс поиска продолжится через блок централизованного контроля. Если Ь с О, т.е, удельная проходка начала уменьшится, то завершается процесс поиска, при этом за Р берется величина (Р- й Р, /2), и управление передается на блок 31.Поиск Р при переходе к менее твердой породе (Поиск = 2) осуществляется по описанному алгоритму, но с разгрузкой на каждом шаге поиска установленной нагрузки Р на величину Р (блок 29. 18) . Если в результате поисса текущая осевая нагрузка стала меньше Рву; (блок 29.19), то вырабатывается сигнал стирания Р с регистра 8 и перехода в режим ожидания "Беор". В ходе поиска на устройство 6 индицируется состояние процесса - вид поиска, удельная проходка, значение Р и директива для смены режима управления.В блоке 31 устанавливаются в регистры уставок устройств. управления найденные в результате поиска эффективные значения режимных параметров (фиг, 14, блоки 31,1 - 31.5) и определяется начальная (реперная) СКОРОСТЬ Чр,еОна опредЬляется путем ведения бурения с нагрузкой Р, в течение вРемени С 1 уе . КонтРоль поддеРжаниЯ нагрузки Рэру устройством 4 осуществляется в блоке БКУП (блок 31.6). Время начала определения скорости Ч и начальная проходка запомирепнаются в блоках 31.9 и 31.10. По истечении времени Т вычисляются проходка (блок 31.13) и реперная скорость (блок 31,14), которая индицируется на экране блока 6. Формируются управляющие признаки (блоки 3115 - 31.19) и управление переда 1314166ется на выполнение непосредственнопроцесса бурения с поддержанием эффективных значений параметров режима.В блоке 22 (фиг. 15) контролируется поддержание нагрузки, наступле-5ние момента подъема инструмента дляочередного наращивания и сам процессподъема инструмента, посадки егона вилку и завершение наращивания,10При каждом очередном прохождении.алгоритма вычисляется сколько осталось еще пробурить до глубины Ь,Ь - предполагаемая глубина забояпосле углубления на длину очереднойнаращенной трубы 1, , т,е. Ь == Ь + 1 , где Ь - глубина забоядо наращивания.Если осталось пробурить до глубины Ь больше чем Е м (блок 22.5),то наращивание.не ожидается (П=О).Поэтому управление передается наблок 23 для ведения процесса бурения с эффективными установленнымирежимными параметрами. Когда остается, до Ь меньше, чем Е, бурильщик предупреждается о наступлениимомента подъема инструмента (наблоке 6 появляется информация:11Внимание Скоро подъем для наращи 130вания ) и процесс бурения продолжается. При достижении глубины ЬЬЬО) выдается указание: "Ручноеуправление", для перехода на ручноеуправление, вырабатывается сигнал(блок 22.7, П = 1) для стирания с 35регистра 8 установленного значенияосевой нагрузки Р, тем самым прекращается подача инструмента, о чем сообщается выдачей на блок 6 информа" ции; "Останов подачи", 40Блоками 22,8 - 22.11 производится контроль за выполнением операций приподъема инструмента и посадки его на вилку и снятия с вилки после выполнения операции. После снятия наращенного инструмента с вилки нагрузка на крюке С будет больше, чем начальная нагрузка С определенная после предыдущего наращивания (блок 12.11). Это значит, что процесс наращивания 50 завершен, По этому признаку включается датчик проходки и считывается начальное положение крюка а. Предыдущееего положение а, было зафиксировано в блоке централизованного ко нтроля (блок 18) в момент посадки инструмента на вилку. Следовательно, длина наращенной трубы 1 тр равна разности этих показаний (блок 22. 13) . 75 34Предлагаемая глубина забоя Ь, докоторой должны пробурить, до следующего наращивания определяется каксумма: Ь = Ь + 1 (блок 22.14). Этозначение и будет использоваться вблоке 223Дальше управление передается на блок 17 для взвешивания инструмента и продолжения процесса бурения с поиском эффективныхпараметров.Процедура бурения заключается вподдержании эффективных режимныхпараметров,в частности осевой нагрузки, определении механической скорости и контроля за эффективностьюбурения. Алгоритм решения этих задач приведен на фиг. 16 и представлен блоком 23 на фиг. 3,Так как функции поКцержания эффективной нагрузки переданы блоку 4,то в блоке 23.1 производится контроль за его поддержанием. Вычисление механической скоростибурения Ч осуществляется следующимобразом: выполняется углубление споддержанием Р до получения проходки ЛЬ, равной заданной Ь (блоки 23.3,23,7 и 23.8); определяется время д,за которое достигнута проходка аЬ(блок 23.10), которая индицируетсяна блок 6.Перед началом углубления на глубину Ь (П=О) фиксируется время(блок 23.4) и значение текущей проходки (блок, 23,5). При последующих циклах П=1, поэтому эти блоки не выполняются, а производится углубление до величины Ь с контролем поддержания эффективной нагрузки через блок 18. После вычисления скорости Ч устанавливается признак начала определения нового значения Ч(блок 23, 11, П = О) и проверяется эффективность ведения процесса бурения (блоки 23. 12 и 23.13)Это связано с тем, что при изменении условий работы долота на забое параметры режима бурения могут стать неэффективными. В этом случае операцию "Поиск" следует повторить. Внешним проявлением эффективности процессов бурения является скорость бурения (проходки)Ее изменение и положено в основу алгоритма анализа эффективности бурения.При выполнении условия Ч /Чр (( 1/С осуществляется поиск Рэ,р для менее твердой породы, а при Ч/ЧС - для твердой, В противном случае,14166считается, что процесс бурения оптимальный и управление передается наблок анализа рейсовой скорости, т.е,блоку 24. Величина С - эмпирическийкоэффициент, зависящий от случайныхвариаций ЧИзвестно, что в процессе бурениярейсовая скорость Ч, повышается домаксимума и это имеет место в момент, 10когда Ч= Ч. Однако вследствиефлуктации текущей скорости Ч возможнопоявление локальных максимумов. Поэ-тому определение оптимальной продолжительности рейса в блоке 24 (фиг.17) 15:производится по неравенству: ЧресС Ч, где СГ - эмпирический коэфФициент.Алгоритм, приведенный на .фиг. 17,функционирует следующим образом. Определяется время механического буренияв часах (блок 24.1), вьГчисляется рейсовая скорость Ч ., (блок242) и анализируется неравенство25Ч-,ъ СГ Ч. Время 1 и скоростьЧре 1 с индицируются на экран блока 6,ЧейсСч Чь то считается, чторейсовая скорость возрастает, Поэтому управление передается в блок18 для продолжения процесса бурения,В случае, когда ЧГе. стала больше,чем С Ч, начинается накапливаниеИнформации о количестве наступленияаналогичного случая (блоки 24.5и 24,6) из общего числа проверки(анализа) неравенства Ч, ",ъ С Ч,Количество проводимого анализа Мзадается. Если количество поступающей информации К об износе вооружения составляет 807. (блок 24,8),то 40вырабатывается сигнал "Износ вооружения" (П= 2) и управление передается на блок 25 для подъема инструмента,При К 0,8 Н продолжается бурениеВ блоке 25 (фиг. 18) анализирует-.ся причина подъема инструмента(блок 25.1) и выдается соответствующая информация на блок 6 отображения информации, Дается директивадля перехода в ручной режим выполнения операций по подъему инструмента для замены долота,Система управления процессом бурения, содержащая датчики технологических параметров, выходы. которых через аналого-цифровые преобразователиподключены к входу блока обработкии контроля информации, блок отображения информации и исполнительный механизм, о т л и ч а ю щ а я с ятем, что, с целью повышения точности управления путем исключения дискретности в формировании сигнала управления и учета времени реакции объекта управления на управляющий сигнал,она снабжена блоком задержки и блоком управления подачей долота, выполненного в виде последовательно соединенных регистра уставки осевой нагрузки, промежуточного регистра и первого цифроаналогового преобразователя, выход которого соединен с первым входом первого сумматора, а также регистра нагрузки на крюке, выход которого через второй цифроаналоговый преобразователь подключен к первому входу второго сумматора, выход которого соединен с вторым входом первого сумматора, выход первого сумматора подключен к входу анализатора знака рассогласования осевой нагрузки, первый выход которого соединен с усилителем, при этом первый выход 55Производится стирание установочной нагрузкиР на регистре 8 устав-. ки осевой нагрузки блока 4, т.е.останавливается подача инструмента. 756 Выводится (или заГОмина ется) ; Но -ситель данные за реис и по скаткие.По оператору Конец заГерится выполнение алгоритма.Описанные алгоритмы определяют функцию блока 3 (фиг. 1) обработки и контроля информации и однозначно устанавливают порядок движения информации и ее связи внутри блока,Таким образом, надежность в работе предлагаемой системы управления процессом бурения обеспечивается за счет использования автономного регулятора подачи, работа которого дополнительно контролируется и с помощью которого, за счет наличия блока управления подачей долота предлагаемой конструкции и введения регулируемой задержки времени, достигается плавность поддержания осевой нагрузки и ее соответствие заданной, особенно в переходных режимах.Аналогичным образом осуществляется управление частотой вращения ротора и бурового насоса.
СмотретьЗаявка
4063820, 29.04.1986
ВСЕСОЮЗНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ И ПРОЕКТНО КОНСТРУКТОРСКИЙ ИНСТИТУТ НЕФТЯНОГО МАШИНОСТРОЕНИЯ
АЙЗУППЕ ЭЛЬМИР АПОЛОСОВИЧ, ГУСЕВ ВАСИЛИЙ НИКОЛАЕВИЧ, МИШУНИН ДМИТРИЙ АЛЕКСЕЕВИЧ, ЯЛАЛДИНОВ РИНАТ АЛЯЛДИНОВИЧ
МПК / Метки
МПК: E21B 44/00, E21B 44/02
Опубликовано: 15.08.1988
Код ссылки
<a href="https://patents.su/21-1416675-sistema-upravleniya-processom-bureniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления процессом бурения</a>
Блок задержки цифровой информации с самоконтролем

Номер патента: 1368922
Опубликовано: 23.01.1988
Авторы: Дрозд, Карпенко, Лацин, Лебедь, Полин
МПК: G11C 29/00
Метки: блок, задержки, информации, самоконтролем, цифровой
...выход контроля устройства как информация о происшедшем сбое. В следующем такте этот же сигнал о сбое через элемент ИЛИ 8 записывается во второй накопитель 10, где осуществляется задержка информации о происшедших сбоях на 1 тактов (где 1=2 причем рд). Сигнал с выхода регистра 11 поступает через элемент ИЛИ 8 снова на вход второго накопителя 10. Таким образом, во втором накопителе 10 постоянно циркулирует по кольцу информация о происшедших в первом накопителе 3 .сбоях в различных ячейках. Предположим, что произошел отказ одной из ячеек памяти первого накопителя 3. Тогда информация о сбое поступает в кольцо, реализованное на втором накопителе 1 О. Через К тактов вновь осуществляется чтение из отказавшей ячейки первого накопителя 3 и...
Устройство для мелкошпурового бурения в блоке камня

Номер патента: 620383
Опубликовано: 25.08.1978
Авторы: Кокотов, Лурсманашвили, Пономаренко, Шендерович
МПК: B28D 1/14
Метки: блоке, бурения, камня, мелкошпурового
...регулирующие шарниры 11 и винты 12, поддерживающая балка подвешена на троссах 13, на раме расположен механизм 14 передвижения. Имеется также тележка15 на рельсовом пути 16, лебедка 17 для,передвижения тележки и лебедка 8 18 подъема траверсы. Пульт 19 управ,ления расположен в кабине 20,На тележку 15 укладывают каменный блок, с помощью лебедки 17 тележку 15 подводят под перфораторы 7. С по- О мощью лебедки 18 раму 2 устанавлива ют на необходимую высоту, причемперфораторы с пригрузом 8 находятся в верхнем положении, удерживаемые поддерживающей балкой. При необхо димости положение направляющих 5 по ,отношению к блоку камня устанав,ливается с помощью шарнира 11 и винтов 12. При опоре стержней 9 в поддерживающую балку 10, пригрузы 8 ррне давят...
Блок оптической выборки информации для голографического запоминающего устройства
Номер патента: 1131360
Опубликовано: 20.01.1996
Автор: Вербовецкий
МПК: G11C 11/42
Метки: блок, выборки, голографического, запоминающего, информации, оптической, устройства
1. БЛОК ОПТИЧЕСКОЙ ВЫБОРКИ ИНФОРМАЦИИ ДЛЯ ГОЛОГРАФИЧЕСКОГО ЗАПОМИНАЮЩЕГО УСТРОЙСТВА, содержащий коллимирующий узел, выход которого оптически связан с входом первого управляемого транспаранта, узел фокусировки лучей, выход которого оптически связан с фотоприемным узлом, и узел управления, содержащий генератор синхроимпульсов, первый выход которого подключен к входу первого буферного накопителя, выход которого соединен с входом первого формирователя управляющих сигналов, выход которого подключен к первому управляющему транспаранту, второй выход генератора синхроимпульсов подключен к входу второго формирователя управляющих сигналов, первый выход которого подключен к входу фотоприемного узла, второй выход второго формирователя управляющих...
Блок задержки цифровой информации с самоконтролем

Номер патента: 1388956
Опубликовано: 15.04.1988
Авторы: Дрозд, Лацин, Малярчук, Панченко, Полин
МПК: G11C 29/00
Метки: блок, задержки, информации, самоконтролем, цифровой
...импульса одновибратора 13 в сумме не должны превышать длительность цикла Чтение.Информация о сбое в считываемом в данный момент слове поступает на выход 18 устройства. Одновременно происходит проверка и, если нужно, исправление адреса в счетчике 7. Исправление осуществляется следующим образом: по переднему фронту синхроимпульсов на входе 16 устройства счетчик 7 увеличивает свой адрес на единицу, по этому же фронту предыдущий адрес переписывается в счетчик 8. Таким образом, счетчик постоянно хранит адрес предыдущего цикла чтение-запись. Г 1 ри появлении сигнала о сбое (1 на выходе блока 6 сравнения) счетчик увеличивает свое состояние на единицу, Если при этом адреса, выдаваемые счетчиками 7 и 8, совпадают, то на выходе блока 9 сравнения...
Устройство для управления процессом бурения скважин

Номер патента: 636379
Опубликовано: 05.12.1978
Автор: Сахаров
МПК: E21B 45/00
Метки: бурения, процессом, скважин
...подключен к блоку 6 определения проходки на долото и к интегратору 7. Интегратор 7 связан с блоком 8 определения относительного износа долота. Блок 9 определения ресурса проходки долотом связан с блоками 6 и 8. Выход блока 9 подкл 1 очен к блоку 14 вычисления механической скорости бурения н к сумматору 10. Датчик 11 глубины проходки подключен ко второму входу сумматора 10 и к блоку 13 определения возможного времени бурения долотом, а выход сумматора 10 подсоединен к блоку 13 и к измерительному прибору 17, Датчик 12 времени проходки подключен к блоку 14 и блоку 13, Выход блока 13 соединен с блоком 14 и измерительным прибором 16, причем выход блока 14 связан со вторым входом блока 15 сравнения.Устройство для управления процессом...
Предыдущий патент: Устройство для заканчивания скважин
Следующий патент: Регулятор подачи долота
Случайный патент: Сепаратор