Устройство для программного управления с коррекцией взаимного положения рабочих органов станка
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
о пмс А-"в 4 г , , щ 697977 Сфвэ Советскик Сециалистическик Республик(22) Заявлено 02.0378(21) 2586113/18-24 (51)М. КЛ.2 С 05 В 19/18 с присоединением эаяаки йф(23) Приоритет -Государственный комитет СССР по делам изобретений н открытий(71) Заявитель Ленинградский ордена Ленина электротехнический институт им. В,И,Ульянова (Ленина)(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯС КОРРЕКЦИЕЙ ВЗАИМНОГО ПОЛОКЕНИЯ РАБОЧИХОРГАНОВ СТАНКА Изобретение относится к автоматике и может найти применение в системах программного управления движением рабочих органов станков, напримернамоточных и металлорежущих,5По основному авт.св,Р 420986 известно устройство для программногоуправления, содержащее программозадающий блок, первую схему И и соединен-ные с соответствующими рабочими органами блоки регулирования скорости,путевые датчики, два триггера и дведополн ительные схемы И, соединенныес блоками регулирования скорости, другие входы которых соединены со входами соответствующих дополнительныхсхем И и подключены к выходам программозадающего блока, соединенногос путевыми датчиками, которые подключены к триггерам. Выходы триггеров 20соединены со входами всех схем И,а выход первой секции И подключен кодному из входов триггеров (1). Недостатком известного устройства 25 является низкая точность в связи с тем, что каждый рабочий орган самостоятельно корректируют свои ошибки..Цель изобретения - повышение точности устройства. 30 Указанная цель достигается тем, что в каждый канал управления предлагаемого устройства введен ограничител ь сиги ала, первый вход которого подключен к соответствующему выходу программозадающего блока и ко второму входу дополнитсльной схемы И, второй вход - к выходу триггера, а выход - ко входу блока регулирования скорости.На чертеже изображена структурная схема предлагаемого устройства.устройство содержит про граммоз адающий блок 1, ограничители сигнала 2,3, блоки регулирования скорости 4,5, рабочие органы 6,.7, путевые датчики 8, 9, триггеры 10,11, первую схему И 12 и дополнительные схемы И 13 и 14.Устройство работает следующим образом.С выходов программозадающего блока 1 сигналы задания скорости рабочих органов подаются на ограничители 2, 3, коэФФициент передачи которых в исходном состоянии равен 1, поэтому сигн алы з адан ия скорост и без из мен ен ия по сту пают набло ки р е гул иров ан ия ск орости 4,5, управляющие движением рабочих органов б, 7.Если в процессе работы рабочий орган б первым приходит в точку6 97977 ЦНИИПИ Заказ 6552/12 ираж 1015 Подпися Филиал ППП Патент, г. Ужгооод, ул. Проектная контроля, определяемую датчиком 8, арабочий орган 7 отстает от точки контроля датчика 9, датчик 8 выдает импульс, который перебрасывает триггер10 в состояние 1, тогда как триггер 11 продолжает оставаться в состоянии 0. На выходе триггера 10появляется сигнал, который поступаетна вход схемы И 12,дает разрешениена схему И 13 на прохождение корректирующего сигнала скорости движения 1 Орабочего органа 7 в его блок регулирования скорости 5 и запускает ограничитель 2. Рабочий орган 7 движетсяс удвоен ной скоро ст ью, а огран ичитель 2 снижает уровень сигнала навходе блока 4, замедляя скорость рабочего органа 6. Как только рабочийорган 7 достигает точки контроля,датчик 9 выдает импульс, который перебрасывает триггер 11 в состояние1 , На выходе схемы И 12 появляется сигнал, который устанавливаеттриггеры 10 и 11 в состояние0 .На схеме И 13 появляется запрет, ина вход блока 5 поступает толькозадание скорости. Коэффициент передачи ограничителя сигнала 2 вновьстановится равным 1, и на вход блока,4 также поступает только заданиескорости. Процесс коррекции закончен,и схема готова к новому циклу работы,Если в точку контроля раньше приходит рабочий орган 7, то процесс коррекции протекает аналогично описанному, только теперь первым срабатывает датчик 9 и перебрасывает триггер 11, сигнал с выхода которого дает разрешение на прохождение корректирующего сигнала через схему И 14 в блок 4 и запускает ограничитель 3, Скорость рабочего органа 6 возрастает, а рабочего органа 7 - снижается,По достижении рабочим органом 6 точкиконтроля сигнал путевого датчика 8через схему И 12 устанавливает триггеры 10,11 в состояние0 , прекра"щая процесс коррекции.При одновременном приходе рабочихорганов 6 и 7 в точки контрочя сигналс выхода схемы И 12 сразу устанавливаетт тр иггеры 10, 11 в состояние0,и коррекция,не производится,По сравнению с известными предлагаемое устройство позволяет достигнуть более высокой точности, за счеттого, что ошибки одного рабочего органа корректируются с помощью другого,более точного.Ограничители входного сигналамогут иметь как жесткую настройкуна определенную степень ограничения,так и переменную, т. е. быть управляемыми. В последнем случае коэффициент передачи уменьшается по мерероста времени коррекции, доводя темсамым скорость опередившего рабочегооргана до нуля при значительном отставании другого рабочего органа.Формула изобретенияУстройство для программного управления с коррекцией взаимного положения рабочих органов станка поавт.св. Р 420986, о т л и ч а ю щ ее с я тем, что, с целью повышенияточности устройства, в каждый каналуправления введен ограничитель сигнала, первый вход которого подключенк соответствующему выходу программозадающего блока и ко второму входудополнительной схемы И, второй входк выходу триггера, а выход - ко входублока регулирования скорости.Источники информации,принятые во внимание при экспертизе1, Авторское свидетельство СССРР 420986, кл. С 05 В 19/18, 1971,
СмотретьЗаявка
2586113, 02.03.1978
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА ЭЛЕКТРОТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. И. УЛЬЯНОВА
ВОДОВОЗОВ ВАЛЕРИЙ МИХАЙЛОВИЧ, КОРОВИН БОРИС ГЕРМАНОВИЧ, РАССУДОВ ЛЕВ НИКОЛАЕВИЧ, СОКОЛОВ ВАЛЕНТИН НИКОЛАЕВИЧ, ТИХОМИРОВ БОРИС АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: взаимного, коррекцией, органов, положения, программного, рабочих, станка
Опубликовано: 15.11.1979
Код ссылки
<a href="https://patents.su/2-697977-ustrojjstvo-dlya-programmnogo-upravleniya-s-korrekciejj-vzaimnogo-polozheniya-rabochikh-organov-stanka.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления с коррекцией взаимного положения рабочих органов станка</a>
Устройство для управления рабочим органом землеройно транспортной машины
Номер патента: 1055199
Опубликовано: 20.07.1995
МПК: E02F 9/20
Метки: землеройно, органом, рабочим, транспортной
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ, содержащее основной контур программного управления глубины копания, включающий датчик угла наклона, установленный на толкающем брусе и подключенный к элементу сравнения, электрогидравлические усилительные элементы и основной исполнительный элемент выглубления и заглубления рабочего органа, дополнительный контур управления по тяговому усилию, включающий датчик и задатчик тягового усилия, элемент сравнения, электрогидравлические усилительные элементы и дополнительный исполнительный элемент выглубления и заглубления рабочего органа, отличающееся тем, что, с целью повышения точности управления и расширения функциональных возможностей устройства при траншейной разработке...
Устройство для автоматического регулирования глубины хода рабочих органов

Номер патента: 1523072
Опубликовано: 23.11.1989
Авторы: Лысенко, Тараторкин
МПК: A01B 63/114
Метки: глубины, органов, рабочих, хода
...подключены параллельные интерфейсы 67 и 68, входами соединенные с шинами адреса 22, управления 23 и данных 24, а к выходам - транзисторные ключи 69 - 84, соединенные с исполнительными механизмами 16 - 19 и регуляторами 15 и 20 интенсивности управляющих воздействий.На фиг. 3 и За приняты обозначения:%1 - интенсивность управляющего воздействия при регулировании положения рабочих органов;% -- интенсивность управляющего воздействия при регулировании положения платформы датчиков;а 1 - расчетное положение платформыдатчиков;ЛЬ - поправка к заданной глубинехода рабочих органов;Ь 1 - заданная глубина;- сигнал от датчика 2 глубиныхода рабочих органов;61 - допустимое буксование ведущихколес трактора;Ч 1 - теоретическая скорость от датчика...
Устройство для автоматического управления рабочим органом землеройно-транспортной машины

Номер патента: 994651
Опубликовано: 07.02.1983
Авторы: Авдеев, Калашник, Ковалевский, Роднищев, Тепляков, Ульянов, Чикунов
МПК: E02F 9/20
Метки: землеройно-транспортной, органом, рабочим
...блока 2 подключены к входам блоков определения знаков производной тяговой мощности и силы тяги, выходы которых подключены к двум входам трехпозиционного релейного элемента, к двум другим входам которого подключены выход первого компаратора 9 непосредственно и выход второго компаратора 10 через логический элемент И, к второму входу которого подключен логический элемент 11 НЕ, к входу которого подключен выход первого компаратора 9. Устройство работает следующим образом.При включении автоматического управления рабочим органом с измерительных блоков 1 и 2 непрерывные сигналы, пропорциональные действительной скорости движения и свободной силы тяги ЗТМ поступают на компараторы 9 и 10, которые сравнивают их с опорными. На выходе...
Рабочий орган роторного снегоочистителя

Номер патента: 1239195
Опубликовано: 23.06.1986
Авторы: Кирин, Климентьева, Нестеров, Тихомиров
МПК: E01H 5/08
Метки: орган, рабочий, роторного, снегоочистителя
...конечные выключатели гидромотора 26 (не показаны).Кроме того, ходовой винт 27 и гайка 28 защищены от снега пластиной5 35, Впередней части дополнительной рамы 2 установлен поворотный в вертикальной плоскости лоток 36 с приводным регулируемым механизмом, Приводной регулируемый механизм поворот20 ного лотка 36 состоит .из двух гидроцилиндров 37 и 38, шарнирно присое. диненных к нижней поверхности лотка и сообщенных с гидрораспределителем 39, связанным с гидросистемой 4025 базового шасси, Для регулирования положения лотка 36 взаимодействующего со,снегом, рабочий орган снабжен блоком 41 управления, который расположен на базовом шасси, .Выходы блока 41 управления электрически связаны с электромагнитами гидрораспределителя 39, а входы - с...
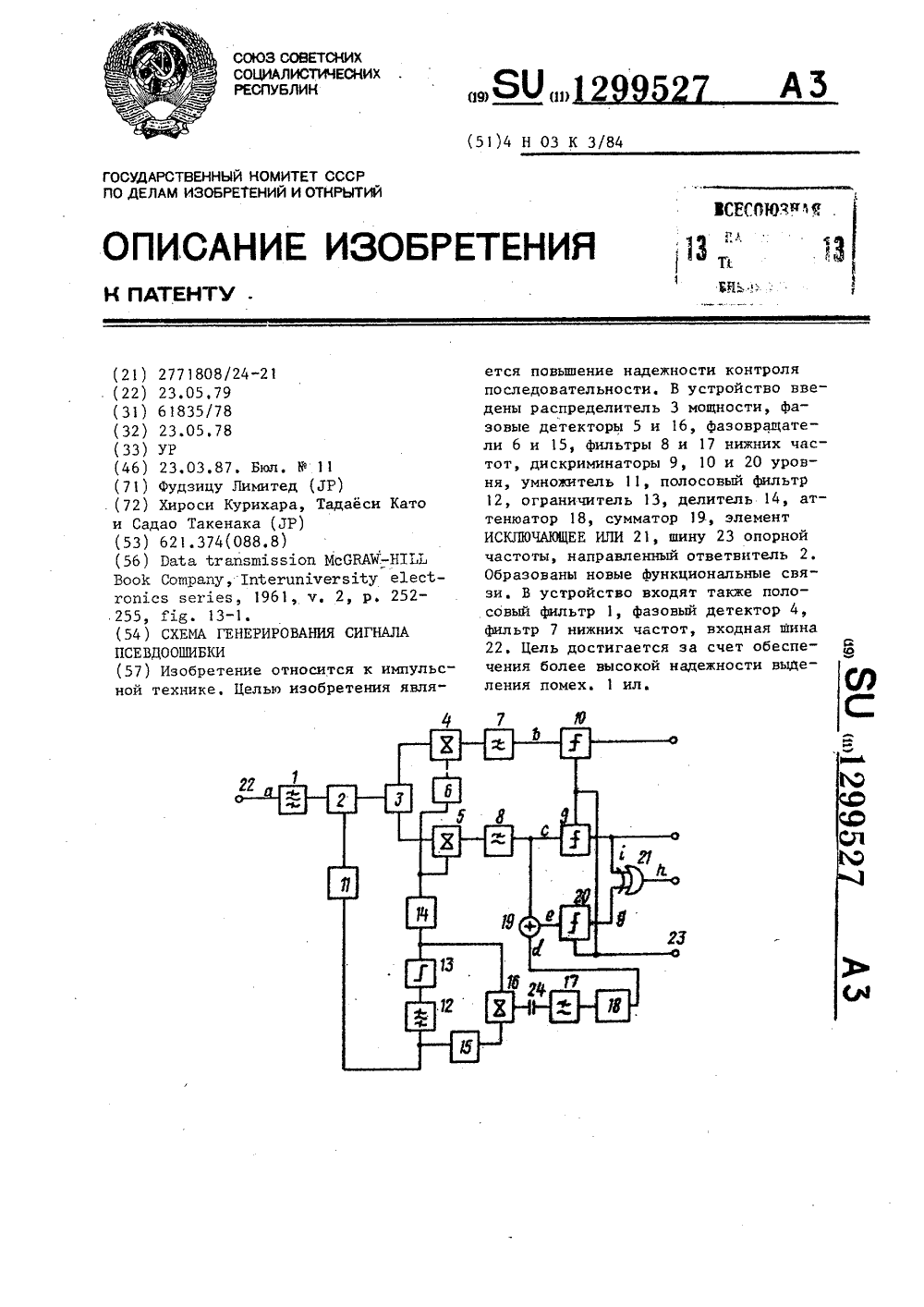
Схема генерирования сигнала псевдоошибки
Номер патента: 1299527
Опубликовано: 23.03.1987
Авторы: Садао, Тадаеси, Хироси
МПК: H03K 3/84
Метки: генерирования, псевдоошибки, сигнала, схема
...в делитель 14, где его частота делится на четыре. В результате этого на выходе делителя 14 формируется сигнал с моноспектром, который в качестве опорного сигнала подается на первый 4 и второй 5 фазовые детекторы,При генерировании сигнала псевдо- ошибки в устройстве используются составляющая помехи, выделяемая из выходного сигнала умножителя 11, и демодулированный входной сигнал, Часть сигнала с манипуляцией сдвигом фазы с направленного ответвителя 2 умножается в умножителе 11 и получается несущая волна с составляющей, пропор12995 циональной составляющей помехи входного сигнала. Фазы каждого векторавходного сигнала с манипуляцией сдвищего сигнала имеет составляющую поме 10 15 го 40 50 55 гом фазы расположены с разностью фазо90 , а умножая...
Предыдущий патент: Линейный интерполятор
Следующий патент: Устройство для программного управления производственными машинами
Случайный патент: Сверло для кольцевого сверления отверстий со сложной поверхностью