Непрерывно-дискретный способ экстремального регулирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 557350
Автор: Казакевич


Текст
557350 одов,Заказ 946/67Попписиос иииипитираж 1095 Фи. иаи ППП "Патсит",г.Ужгопол, уи. Ппоскгиая, 4 белью изобретения является повышение точности регулирования.Поставленная цель достигается тем, что по предложенному способу полученный в результате умножения сигнал интегрируют в течение целого цикла периодов, суммируют его с сигналом управления на предыдущем шаге и полученный сигнал используют для управления.Интегрирование выходного сигнала умножителя при реализации предлагаемого способа производится в пределахО ( т ( Т. При этом сигнал управгпения имеет вид 1,т к,а Т аьто-Следовательно, для устранения влияния дрейфа информацию с выхода интегратора необходимо сни 15 1 мать в дискретные моменты времени т=О,Т, 2 Т, ЗТ , интегрируя в течение одного периода. При выполнении осреднения за несколько периодов (с целью снижения влияния случайных помех) интегратор следует подключать к исполнительному 20 механизму в моменты т = О,Т, 2 Т, ЗТ и т.д.,приводя накопление в течение заданного количества периРассмотрим теперь влияние рабочего смещения 25 входа, Пусть характеристика экстремума модуль. ная, а скорость рабочего смешения равна с; хр = ст. Если наклон характеристики +К то рабочее смещение входа на каждой из ветвей экстремальной характеристики создает экв ива- З 0 лентный дрейф и =+ к, с 1, При этом если а) т, то система теряет устойчивость. Еслиоэ родновременно действуют дрейф и рабочее смещение входа то система теряет устойчивость при аф Э"э"-т.с. рабочее смеотеэме входа влияет та мэаэтогичио Лрейфу экстремума.Предлагаемый способ позволяет не только компенсировать влияние дрейфа, но и влияние рабочего смещения, причем снимаются ограничения на скорость рабочего смещения. Если характеристика 40 криволинейна, то скорость рабочего смещения должна быть такова, чтобы за один период нарушение симметрии на выходе объекта было достаточно Предлагаемый способ может быть использован для инерционных объектов, где помеха действует на выходе объекта,Блок. схема системы, реализующей предлагаемый способ регулирования, изображена на чертеже, где обозначены: объект 1, блок умножения 2, генератор 3, интегратор 4, исполнительный механизм 5, первый и второй ключи 6, 7.Система работает следующим образом, Подаваемый от генератора косинусоидальный сигнал поступает на блок умножения непосредственно и через объект регулирования этот сигнал интегрируется интегратором 4 в течение одного цикла, состоящего из одного или нескольких пе 1 риодов.В конце каждого цикла выход интегратора кратковременно подключается к исполнительному механизму, затем интегратор обнуляется, и процесс интегрирования повторяется. После включения системы в работу рабочее смешение входа вначале делать не целесообразно. Рабочее смещение входа в надлежащую сторону производят после одного- двух поисковых колебаний, когда уже определен знак к,Фор мула изобретенияНепрерывно дискретный способ экстремального регулирования, основанный на умножении косинусоидального поискового сигнала на выходноисигнал объекта регулирования, от лича ющи й с ятем, что, с целью повышения точности регулирования, полученный в результате умножения сигналинтегрируют в течение целого цикла периодов,суммируют его с сигналом управления на предыдущем шаге и полученный сигнал используют дляуправления.Источники информации, принятые во вниманиепри экспертизе:1. Фельдбаум А.А. "Методы оптимизации автоматических систем" М., Наука, 1972 г., стр. 85 - 88,2. Справочник "Самонастраивающиеся системы", под ред. П.И. Чинаева, "Наукова ДумкаКиев, 1969,г., стр. 37 - 40 (прототип),
СмотретьЗаявка
2099359, 20.01.1975
КАЗАКЕВИЧ ВИЛЬЯМ ВИКТОРОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: непрерывно-дискретный, экстремального
Опубликовано: 05.05.1977
Код ссылки
<a href="https://patents.su/2-557350-nepreryvno-diskretnyjj-sposob-ehkstremalnogo-regulirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Непрерывно-дискретный способ экстремального регулирования</a>
Непрерывно-дискретный способ экстремального регулирования

Номер патента: 661507
Опубликовано: 05.05.1979
МПК: G05B 13/02
Метки: непрерывно-дискретный, экстремального
...объект регулирования 1, блок умножения 2, генератор 3, интегратор 4, исполнительный механизм 5, первый 6 и второй 7 ключи,хп - поисковый сигнал, х сигнал рабочего смещения входа, г( - сигнал дрейфа экстремума, у - выходной сигнал объекта, х - поисковый сигнал первого вида, х и - поисковый сигнал второго вида, Т - период сигНала х,п, Т 2 - пеРиод сигнала хп.,- время.Система работает следующим обраПодаваемыйпоступает наредственно ивания 1. Этотинтеграторомла, состоящегких периодов,В конце кажгратора 4 кратк исполнительчего интеграт6615 07 Формула изобретения каз 2 4 7 3 Тираж 1014 ПИ дписное атент, г.ужгород,ул.Проектн Фили 8цесс интегрирования повторяется. Необходимо отметить, что после вклюЧения системы в работу целесообразнорабочее...
Механизм для получения вращающейся световой точки, например для фотоэлектрических копировальных головок

Номер патента: 101287
Опубликовано: 01.01.1955
Метки: вращающейся, головок, копировальных, механизм, например, световой, точки, фотоэлектрических
...связанноу с коггируощим устройством, т .е, смещения центра вращениясветовой точки или аналогичного ей элементарного участка с оси вращения всего механизма, Это смещение (эксцентрицитет вращения) осуществляется на кривых контурной линии графического шаблона, Подобноесмещение, .необходимое, например, для преобразования линейного смещения центра фотоголовки в угловой ее поворот и др., можно осуществить как механическим, так и оптическим путем.Механический способ заключается в смещении объектива с оси вращения электродвигателя или объектива и электродвигателя - с оси поворота всего механизма. В первом случае поворот механизма осуществляется вокруг оси объектива и эксцентрицитет вращения оказываетсяравным смещению объектива, деленному на...
Способ получения полиэфиракрилатов, содержащих симметричный триазиновый цикл
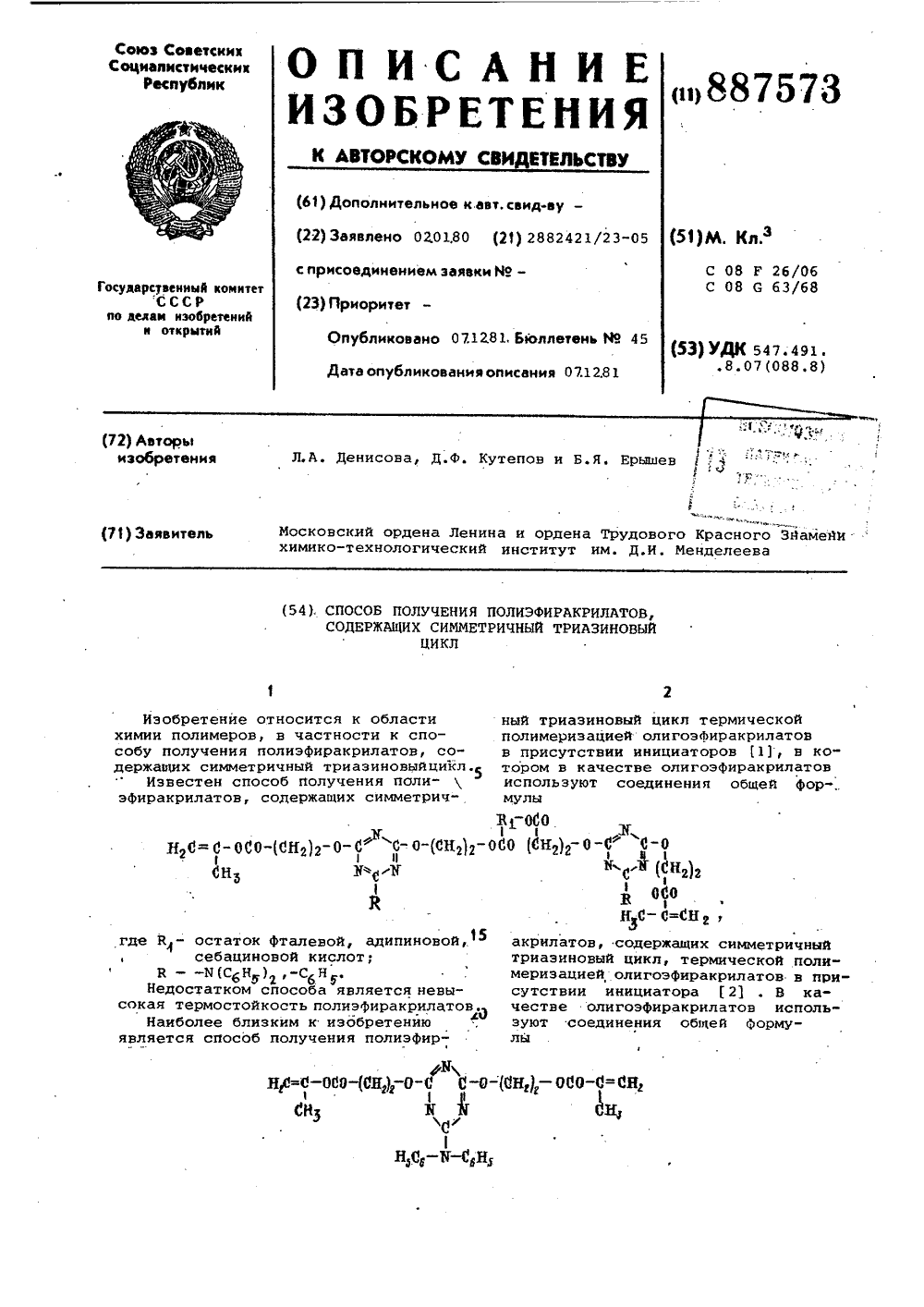
Номер патента: 887573
Опубликовано: 07.12.1981
Авторы: Денисова, Ерышев, Кутепов
МПК: C08F 26/06
Метки: полиэфиракрилатов, симметричный, содержащих, триазиновый, цикл
...температуры от 80 до 150 С: 1-й час 80 С; 2-й час 80-100 С;3-й час 100-120 С 1 4-й час 120-150 С.Содержание гель-Фракции (определялось в аппарате Сокслета) 83,4, Элементный состав полученного полиэфиракрилата,: И С Нтеоретически 22,1 53,7 6,8экпериментально 21,9 52,4 6,9 Термостойкость, определенная на дериватографе, Стемпература начала разложения 255 температура потери 10 массы 300 температура потери 50 массы 500. П р и м е р 6, Аналогично примеру 5 совмещают и полимеризуют 10 г олигоэфиракрилата, полученного по примеру 1, в присутствии 0,4 г (4) тетрабутилпербензоата;. Получается полимер с выходом гель-фракции 86,9Элементный состав полимера,;И С Нтеоретически 22,1 53,7 6,8экспериментально 23,0 52,9 6,4...
Способ получения полиэфиракрилатов, содержащих симметричный триазиновый цикл
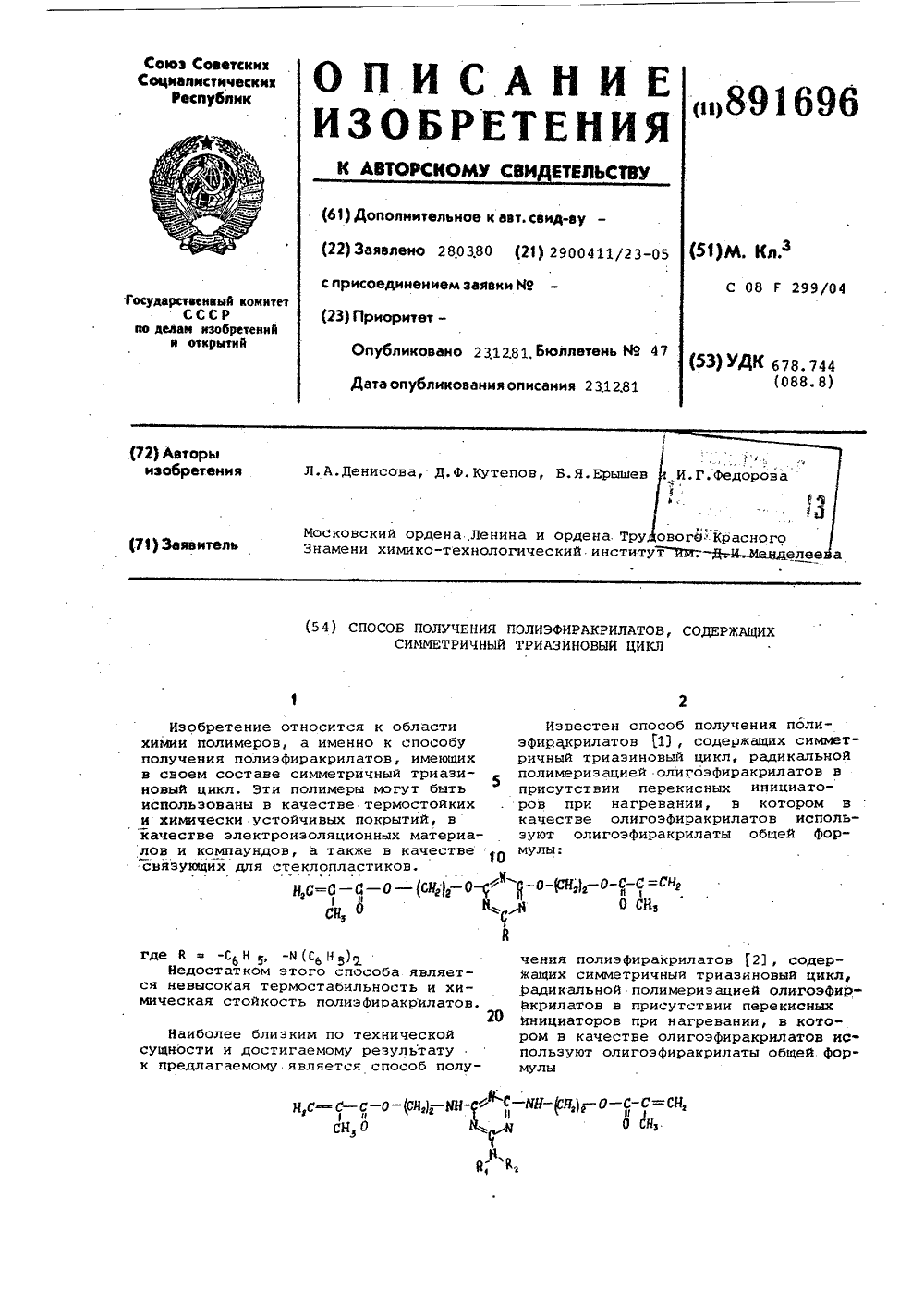
Номер патента: 891696
Опубликовано: 23.12.1981
Авторы: Денисова, Ерышев, Кутепов, Федорова
МПК: C08F 299/04
Метки: полиэфиракрилатов, симметричный, содержащих, триазиновый, цикл
...и термическая стабильность получающихся полимеоов,Цель изобретения, - увеличение термической и химической стойкости .полиэтот олигомер получается реакцией этерификации 1 моль 2,4,6-.триэтаноламин,3,5-триазина З.моль, метакрило;вой кислоты .при 160-150 цС в течение 6-7 ч.П р и м е р 1. 10 г олигоэфиракрилата и 0,2 г перекиси. бензоила (2 от массы мономера). совмещают в .ампуле при 40-60 в течение 30-40 с Ампулу эапаивают,и помещают в .термостат на 40-50 мин при 60-70 фС. Содержание гель-фракции. в полимере. - 93,4.36: Вычислено, ю С - 54,5 Н - 6,49 М - 18,18Найдено, : С - .55,1 Н - 6,11 М - 17,64П р и м е р 2. Аналогично при меру 1 совмещают. и полимеризуют 10 г олигоэфиракрилата и 0,1 .г (1 от массы мономера) перекиси...
Замкнутая радиосеть с несколькими контурами и с одной неподвижной точкой опоры

Номер патента: 353
Опубликовано: 15.09.1924
Авторы: Баженов, Плебанский
МПК: H01Q 1/36
Метки: замкнутая, контурами, неподвижной, несколькими, одной, опоры, радиосеть, точкой
...что обеспечит наилучшее полезное действие всей системы (накопление большого количества энергии), благодаря большей, чем обычно, величине емкости, и излучение большого количества энергии, благодаря короткой волне. При помощи расстановки предлагаемых контуров на некотором расстоянии друг от друга (меньшем /2) можно как угодно близко подойти к идеальному случаюрадиопередачи: только в одном напра-влении (в одной плоскости); остротахарактеристики может быть значительно ( увеличена, По желанию, в зависи- ) мости от взаимного положения конту- ( ров на одной и той же радиостанции, можно получить или более сильную излучающую антенну с малым декрементом на потери и большим коэффи-, циентом полезного действия, но почти круглой характеристикой...
Предыдущий патент: Система автоматического управления
Следующий патент: Аналого-цифровая следящая система
Случайный патент: Цифровой измеритель скорости