Электрогидравлический следящий привод
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
(54) (57) ЭЛЕКТР СЛЕДЯЩИЛ ПРИ родвигатель с вых вательно включен ционный усилитель каскадный электр ОГИ ВОД РАВЛ одерж ИЧЕСК ащий посл и, оп ка и д ий усд одным ые з звеном адатчик тель то лическ до. ра- ух- лиусилгидра ФааЕ Ю л. ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ К А ВТОРСКОМУ СВИДЕТЕЛЬСТВУ(56) Авторское сви771361, кл. Р 15Гамынин Н, С.щих гидравлическишиностроение, 1981 тель, второи.каскад которого выполнен с обратной связью по положению его распределительного элемента и подключен к полостям гидродвигателя, выходное звено которого соединено датчиком обратной связи по положению с отрицательным входом операционного усилителя, а также устройство коррекции скорости выходного звена гидро- двигателя, отличающийся тем, что, с целью упрощения конструкции и повышения КГ 1 Д, устройство коррекции установлено на выходе задатчика и выполнено в виде последовательно соединенных дополнительного операционного усилителя, электронного ограничителя напряжения и интегратора, выход которого подключен к положительному входу основного операционного усилителя и к отрицательному входу дополнительного операционного усилителя.1245768 Составитель С. Рождественский Редактор Н. Марголина Техред И. Верее Корректор В. Бутяга Заказ 3976/25 Тираж 610 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий13035, Москва, Ж - 35, Раушская наб., д. 4/5 Филиал ППП Патент, г. Ужгород, ул. Проектная, 4Изобретение относится к гидроавтоматике и может быть использовано в системах управления строительных и дорожных машин.Цель изобретения - упрощение конструкции и повышение КПД.На чертеже изображена схема электро- гидравлического следящего привода,Привод содержит гидродвигатель 1 с выходным звеном 2, последовательно включенные задатчик (не изображен), основной операционный усилитель 3, усилитель 4 тока и двухкаскадный электрогидравлический усилитель 5, второй каскад 6 которого выполнен с обратной связью по положению его распределительного элемента 7, выполненного, например, с управляющими поршнями 8, 9 и с золотником 10, подключенным к полостям 11 и 12 гидродвигателя 1, звено 2 которого соединено датчиком 13 обратной связи по положению с отрицательным входом усилителя 3, а также устройство 14 коррекции скорости звена 2, установленное на выходе задатчика и выполненное в виде последовательно соединенных дополнительного операционного усилителя 15, электронного ограничителя 16 напряжения и интегратора 17, выход которого подключен к положительному входу усилителя 3 и к отрицательному входу усилителя 15,Электрогидравлический следящий привод раоотает следующим образом.Управляющий сигнал поступает на вход операционного усилителя 15, затем на вход ограничителя 16 напряжения и далее на интегратор 17, на выходе которого появляется напряжение, максимальная скорость изменения которого ограничена ограничителем 16 напряжения. На входе в операционный усилитель 3 происходит сравнение сигнала, поступающего на операционный усилитель 3 с интегратора 17, и сигнала, поступающего с дат н,ка 13 обратной связи, по положению выходного звена 2. Если максимальная скорость изменения напряжения с выхода интегратора 17 близка к скорости изменения напряжения с датчика 13 обратной связи, величина ошибки рассогласования равна расчетной величине и золотник 10 открыт на величину, обеспечивающую требуемую максимальную скорость перемещения выходного звена 2. Независимость максимальной скоростиперемещения выходного звена 2 от нагрузки обеспечивается за счет следующих факторов. При увеличении нагрузки на выходном звене 2 следящего привода с дроссельным управлением скорость перемещения выходного звена 2 уменьшается. Если на вход электрогидравлического следящего привода подают управляющий сигнал со скоростью, равной заданной скорости изменения координаты выходного звена 2, что обеспечивается за счет наличия интегратора 17, то пока нет нагрузки, ошибка рассогласования между скоростью изменения сигнала в цепи обратной связи по положению выходного звена 2 и скоростью изменения управляющего сигнала на входе в усилитель 3 равна расчетной величине. При увеличении нагрузки на выходном звене 2 скорость его перемещения упадет, величина рассогласования между сигналом в цепи обратной 20 связи по положению выходного звена 2 исигналом на входе в усилитель 3 увеличивается и золотник 10 открывается до тех пор, пока величина рассогласования не достигнет величины, достаточной для движения выходного звена 2 с заданной скоростью.При увеличении скорости отработки выходного звена 2 за счет воздействия внешних факторов (например, уменьшение нагрузки, повышение температуры рабочей жидкости и т.д.) величина рассогласова- ЗО ния между сигналом на входе в усилитель 3и сигналом в цепи обратной связи по положению выходного звена 2 увеличивается, но при этом знак ее изменяется на противоположный и золотник 10 прикрывается до тех пор, пока скорость отработки выходного зве на 2 не достигает заданной величины.Дополнительный операционный усилитель 15 и интегратор 17 необходимы для того, чтобы обеспечить требуемую скорость изменения электрического сигнала на входе в 40 усилитель 3, что является необходимым условием обеспечения независимости скорости перемещения выходного звена 2 от нагрузки и исключения непроизводительных потерь энергии на дросселирование.Использование предлагаемого изобре тения в системах управления строительныхи дорожных машин позволяет повысить КПД и упростить их конструкцию и, следовательно, увеличить эффективность их использования.
СмотретьЗаявка
3830162, 25.12.1984
ПРЕДПРИЯТИЕ ПЯ В-8670
РАЗИНЦЕВ ВАЛЕРИЙ ИВАНОВИЧ, ВОЛКОВ СЕРГЕЙ ВЛАДИМИРОВИЧ, ВАСИЛЕНКО БОРИС МИХАЙЛОВИЧ, РЯБИНИН ГЛЕБ БОРИСОВИЧ, ШАРЫПОВ ВЛАДИСЛАВ ИЗМАЙЛОВИЧ
МПК / Метки
МПК: F15B 9/03
Метки: привод, следящий, электрогидравлический
Опубликовано: 23.07.1986
Код ссылки
<a href="https://patents.su/2-1245768-ehlektrogidravlicheskijj-sledyashhijj-privod.html" target="_blank" rel="follow" title="База патентов СССР">Электрогидравлический следящий привод</a>
Шарнирно-рычажный механизм с регулируемой остановкой выходного звена

Номер патента: 901685
Опубликовано: 30.01.1982
Автор: Кудинцев
МПК: F16H 29/08
Метки: выходного, звена, механизм, остановкой, регулируемой, шарнирно-рычажный
...7 и 8 сообщены с бесштоковыми полостями 9 и 10 гидроцилиндров 11 и 12, штоки 13 и 14 которых шарнирно связаны между собой. Кроме того, механизм содержит ползун 15, осциллограф 16, двигатель 17 и потенциометр 18.Механизм работает следующим образом.При вращении кривошипа 1 конец шатуна 2 описывает в одном из его положений дугу окружности радиусом, равным длине водила 3, центр вращения которого остается901685 20 формула изобретения моиг Е ь А. Волковкас КорректоПодписноитета СССРткрытийя наб., д. 4/5ул. Проектная, 4 Составител Техред А. Бой Тираж 980рственного ком обретений и о- 35, Раушска г. Ужгород,едактор И. Тыкейаказ 12339/43ВНИИПИ Госудапо делам и113035, Москва, ЖФилиал ППП Патент утяг знеподвижным в течении времени выстроя, при...
Способ определения переходной характеристики системы автоматического регулирования с релейным выходным звеном

Номер патента: 484504
Опубликовано: 15.09.1975
МПК: G05B 23/00
Метки: выходным, звеном, переходной, релейным, системы, характеристики
...переходной характеристики линейной части системы без отключения релейного звена. Это достигается тем, что ца вход системы подают дополнительный сигнал, меньший единичного, а единичный оцгпал подают по окончании переходного процессавызванного дополнительным сигналом.На фиг. 1 изображена блок-схема устройства для определения переходной характеристики линейной части системы, реализующего предлагаемый способ; ца фиг. 2 покаНа сумматор 4 подают от еполнительный сигнал х , ревыражением х , = п,х, гдцпепт, мецьший единицы, х, - ед 15 сигнал.После того, как счтстема придет в установившийся режим, на нее скачком подается сигнал хг Одновременно этот сигнал поступает в измеритель 5, который с этого момента 20 начинает отсчет времени. Через...
Устройство для определения изменения размеров стопы под нагрузкой
Номер патента: 205215
Опубликовано: 01.01.1967
Авторы: Зева, Кречмар, Шаргородский
МПК: A61B 5/107
Метки: изменения, нагрузкой, размеров, стопы
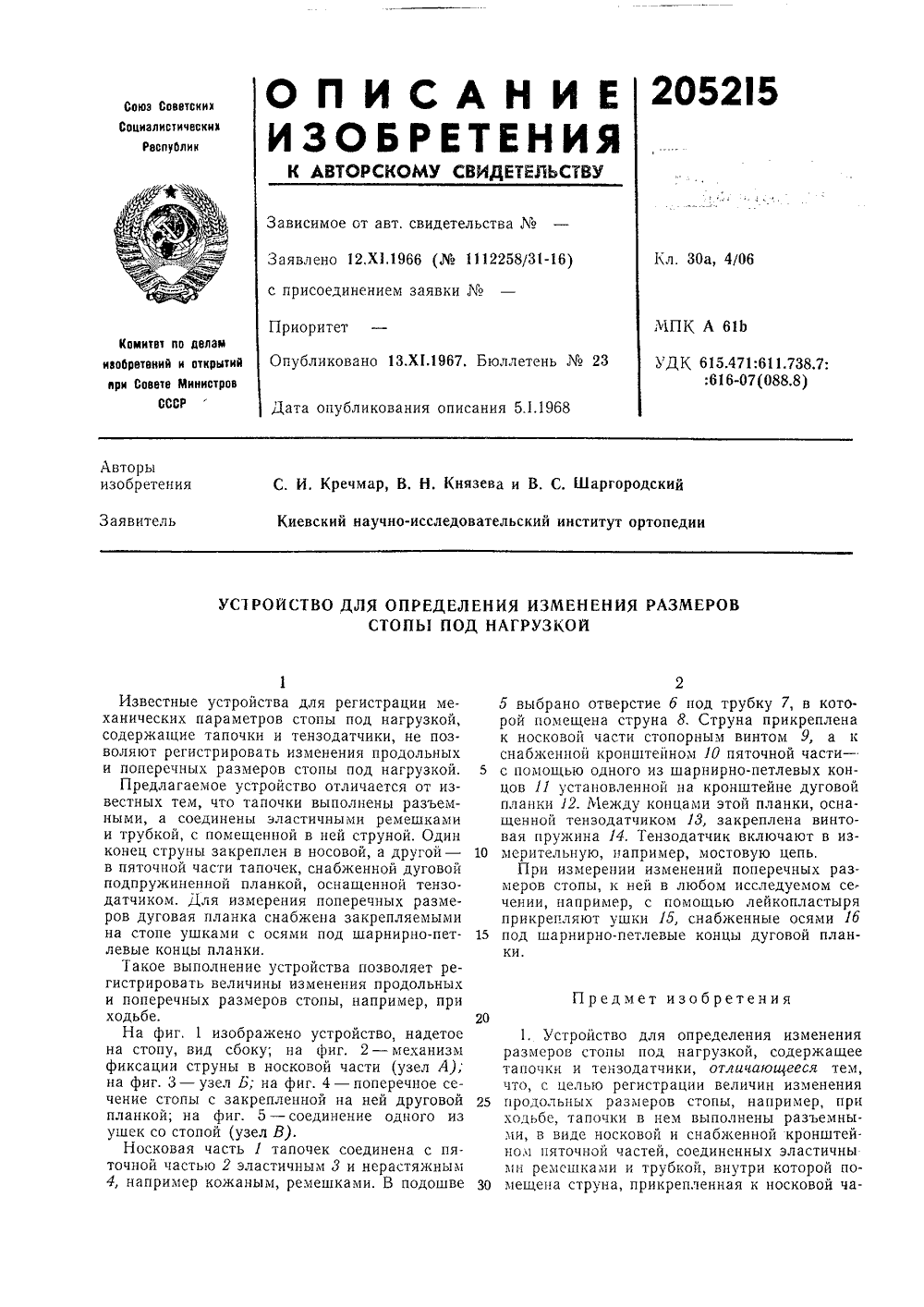
...в пяточной части тапочек, снабженной дуговой подпружиненной планкой, оснащенной тензо. датчиком. Для измерения поперечных размеров дуговая планка снабжена закрепляемыми на стопе ушками с осями под шарнирно-пет левые концы планки.акое выполнение устройства позволяет регистрировать величины изменения продольных и поперечных размеров стопы, например, при ходьбе. 20На фиг, 1 изображено устройство, надетое на стопу, вид сбоку; на фиг. 2 - механизм фиксации струны в носковой части (узел А); на фиг. 3 - узел В; на фиг. 4 - поперечное сечение стопы с закрепленной на ней друговой 25 планкой; на фиг. 5 - соединение одного из ушек со стопой (узел В).Носковая часть 1 тапочек соединена с пяточной частью 2 эластичным 3 и нерастяжным 4, например...
Механический усилитель мощности с поступательным движением выходного звена

Номер патента: 484344
Опубликовано: 15.09.1975
Авторы: Гейшерик, Кобринский, Левковский
МПК: F16H 25/20
Метки: выходного, движением, звена, механический, мощности, поступательным, усилитель
...1 и размещенный в нем силовой двигатель 2, управляющий двигатель 3, кинематическую передачу, выполненную в виде несамотормозящей пары винт 4 - гайка 5, фрикцион 6, соединяющий связанную с ль работает следующим образом.Усилие от двигателя 2 направлено вдольвинта 4, который воздействует на гайку 5.Фрикцион 6 прижимается к корпусу 1 и препятствует осевому смещению винта 4, кото О рый стремится повернуть гайку 5. Однако принеподвижном управляющем двигателе 3 система остается без движения, так как момент, создаваемый винтом 4 на гайке 5, уравновешивается моментом трения между фрикцио ном 6 и корпусом 1. При подаче сигнала науправляющий двигатель 3 он начинает вращаться и стремится отодвинуть фрикцион 6 в осевом направлении от корпуса 1 и тем...
Выходной каскад транзисторного усилителя

Номер патента: 372670
Опубликовано: 01.01.1973
МПК: H03K 6/02
Метки: выходной, каскад, транзисторного, усилителя
...же токостабилизирующего транзистораа.На чертеже приведена принципиальная схема устройства.Выходной каскад усилителя развертки содержит транзистор 1, на базу которого подается пилообразное напряжение, токостабилизирующий транзистор 2, дополнительный эмиттерный повторитель на транзисторе 3 и ЯС-фильтр, состоящий из резистора 4 и конденсатора 5. База транзистора 2 соединена с выходом дополнительного эмиттерного повторителя на транзисторе 3, вход которого через ЛС-фильтр подключен к коллектору этого же токостабилизирующего транзистора.Транзисторы 1 и 2 имеют высокое выходноесопротивление для переменного и постоянного 5 токов, поэтому небольшие изменения температурного режима вводят один из них в режим насыщения, что приводит или к...
Предыдущий патент: Вихревой вакуумный насос
Следующий патент: Гидросистема
Случайный патент: Способ получения поли-( -галогенэтил)этиленимина