Стенд для измерения силовых параметров в резьбовых соединениях
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1781570
Автор: Бобров
Текст
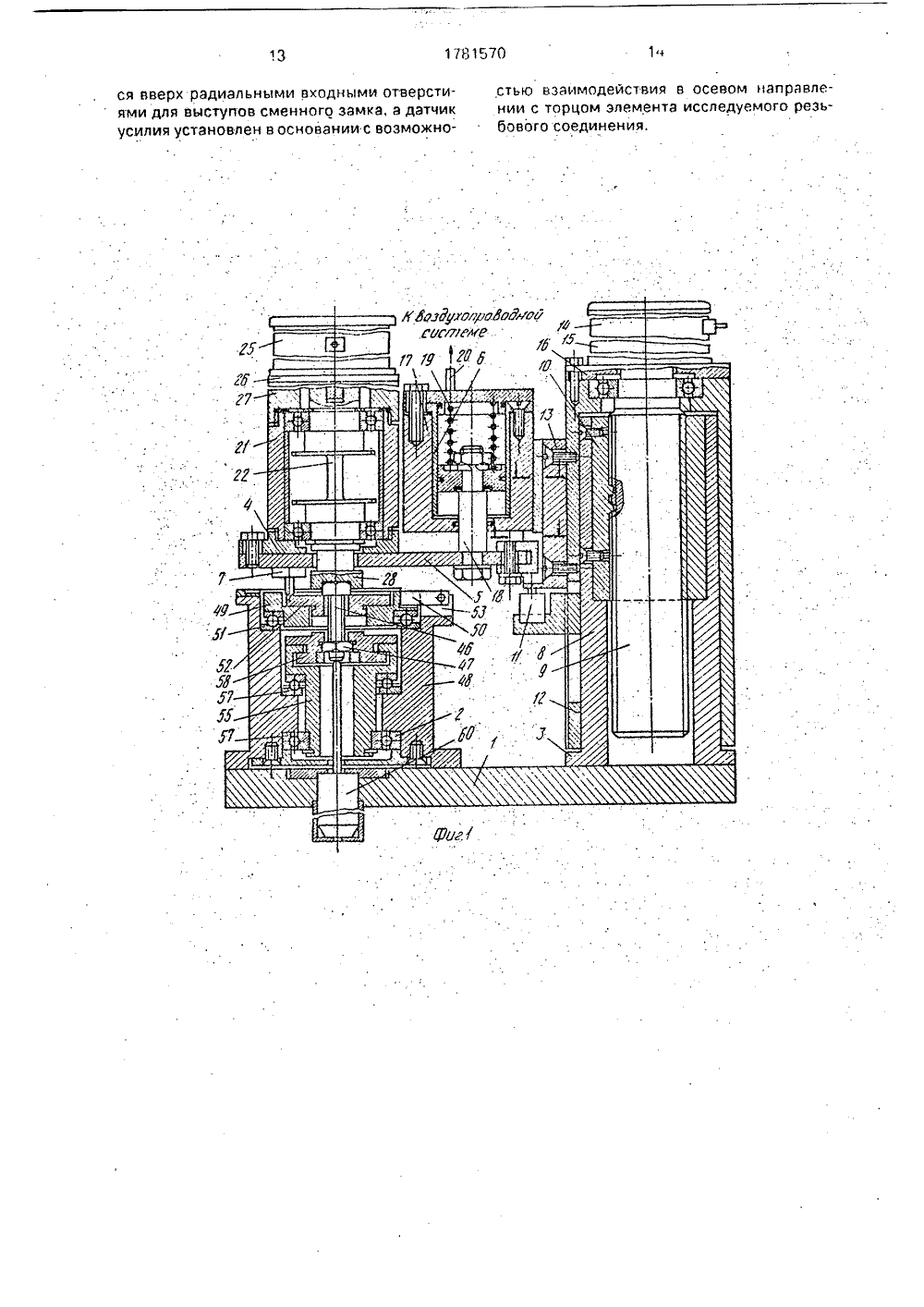
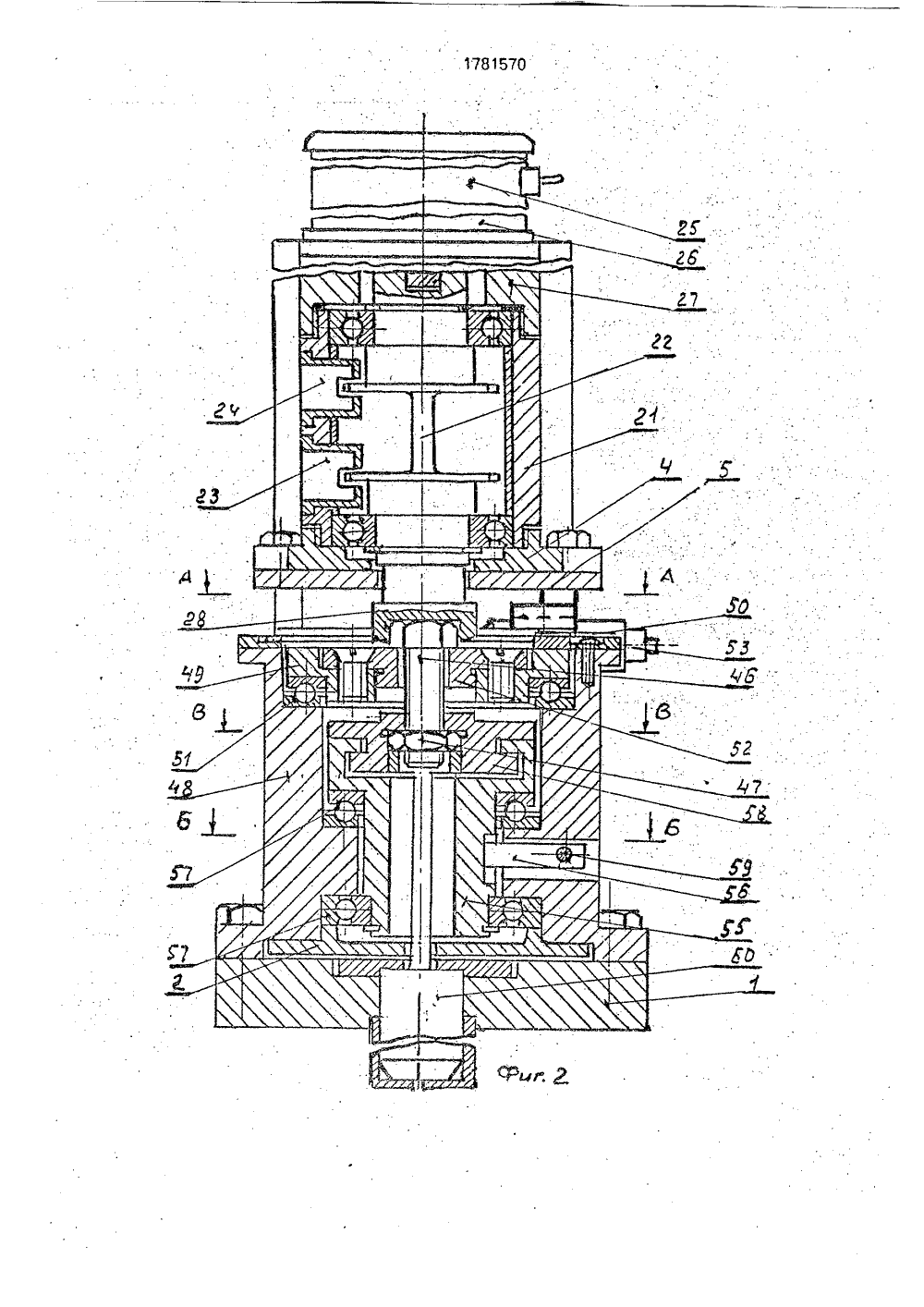
(505 6 01 16 ГОСУДАРСТВЕННОЕ ПАТЕНТНО ВЕДОМСТВО СССРГОСПАТЕНТ СССР)ОПИСАНИЕ ИЗОБРЕТЕНИК АВТОРСКОМУ СВИДЕТЕЛЬСГВУ айка, сменля пание,(21) 4906494/10(71) Московский автомеханический институт(56) Авторское свидетельство СССРМ 1045019, кл, 6 01 1 5/16, 1982.Авторское свидетельство СССР(54) СТЕНД ДЛЯ ИЗМЕРЕНИЯ СИЛОВЫХПАРАМЕТРОВ В РЕЗЬБОВЫХ СОЕДИНЕНИЯХ(57) Сущность. изобретения: стенд содер-жит основание 1, закрепленный на неммеханизм контроля 2 с вертикальной осью,расположенный соосно над ним исполнительный механизм 4, механизм перемещения 3 и механизм поджима 6. Во втулчатомкорпусе 48 механизма контроля 2 соосноустановлены с возможностью вращения кольцеобразный столик 49 с упором 50 и закрепленная на нем опорная шайба 52, В корпусе48 с возможностью взаимодействия с упором 50 закреплен датчик момента трения 53опорной поверхности. Под столиком 49 соосно с ним усгановлена вращающаяся в корпусе 48 вставка 55 с упорам 56. Во вставке55 выполнены осевое отверстие и сообщеннь 1 е с ним дуговые направляющие пазы сответвляющимися вверх входными отверстиями для выступов сменного замка 58,имеющего расположенное вдаль его осиисИзобретение относится к приборостроению и может быть использовано в любой отрасли машиностроения для измерения силовых параметров, возникающих в резьбовам соединении типа болт(винт) - гайка,2следуемое резьбовое отверстие. В корпусе48 закреплен взаимодействующий с упоромдатчик момента трения в резьбе, Датчикусилия 60 установлен в основании 1 с возможностью взаимодействия с торцом ввинчиваемого элемента 46, Исполйительйыймеханизм"4 выполнен в виде привода 25,связанного с коаксиально установленнымво втулке 21 шпинделем 22, оканчивающимся внизу ключом 28; Шпиндель 22 выполненв ниде двух перфорированных дисков и расположенного между нимй торсйбна. Ьо.йтулке 21 размещены датчик общего момента 23 и датчик угла поворота 24, Электромагнитная муфта 27. связана с приводом 25 ишйинделем 22, а втулка 21 закреплена нагоризонтальной плите 5. Датчик начальногоположения 7 установлен с возможностыювзаимодействия с плитой 5 и торцом столика 49. Цилиндрический корпус 8 механизма Жперемещения 3 закреплен на основании 1 и ( "вйполнен с вертикальным отверстием, сопряженным с ходовым винтом 9, На корпусе8 установлена с возможностью перемещения гильза 12 с приводом 13 и электромагнитной муфтой 16; Механизм поджима 6щамвыполнен в виде пневмоцилиндра, жестко 4соединенного с гильзой 12, шток которого СОнижним концом связан с плитой 5, Датчик ъконечного положения 11 установлен с воз- (Лможностью взаимодействия с корпусом 8 игильзой 12. 9 ил,олт(винт) - корпус, шпилька -шпилька - корпус, с использованием ых закладных деталей,Известна устройство для контр аметров резьбы, содержащее осно1781570 Составитель В,Боюброехред У.Моргентал Редактор В,Трубченко Т Корректор М,Андрушен роиэводственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина Заказ 4269 ВНИИПИ Госуд Тираж твенного комитет 113035, Москва, Подписноепо изобретениям и открытиям при ГКНТ СССР1781570 10 30 40 корпус, стакан, упругие элементы с тензорезисторами, испытуемый реэьбовой образец, причем корпус содержит замок, стакан связан с корпусом через ойорный шарикоподшипник, упругие элементы по касательной расположены к поверхности стакана,корпус соединен через шариковую опору с датчиком момента Недостатком данного устройства является то, что общиймомент снимается с карпуса; а не с ключа, момент трения в резьбе измеряется с погрешйостью из-за отсутствия опоры под стаканом, применяемые тензорезисторы не обеспечивают стабильности показания иэ-за того, что требуют большого тока для работы, в результате чета появляется температурная текучесть. Измеряемые характеристики зависят друг ат друга, Наиболее близким к. изобретению по технической сущности является устройство, содержащее основание, механйзм контроля с вертикальной геометрической осью, закрепленной на основании, и исполнительный механизм, расположенный над механизмом контроля соосно с нимпри этом механизм контроля вклочает в себя корпус в виде втулки, установленный саас- НО в нем с возможностью вращения кольце- образный сталйк с упором, опорную.шайбу,расположенную саасно столику, датчик момента трения опорной поверхности,закрепленный в корпусе механизма контроля с возмажность 1 о взаимодействия с упоромкальцеобразнаго столика, вставку с упором, 35 саосно устанавленнуо с возможностьювращения в корпусе механизма контроля под кольцеобразным столиком, датчик момента тренияв резьбе,.закрепленйый вкорпусе механизма контроля с возможностью взаимодействия с упором вставки,сменный замок, закрепленный на вставке с расположенным вдоль ее аси,резьбавым от верстием, и датчик усилия, а исполнительный механизм выполчен в виде привода, 45 связанного с коаксиально установленным ва втулке шпинделем, оканчивающимся распаложенным. внизу ключом, причем шпиндель выполнен с двумя параллельными перфорированными дисками, каждый из которых соединен с соответствующим концам расположенного между ними вдоль оси шпинделя торсиана, а оа втулке исполнительного механизма размещены с оозможностью . Взаимодействия с соответствующими перфорированнымидисками датчик общего момента и датчикугла пооарота-. Процесс наложения ключа на гблавку воинчиоаемага образца в этом устройстве немеханизированы, что приводит к большим временным Затратам на проведение цикла работы, т.е. эффективность этого устройства невысока,Целью изобретения является устранение указанного недостатка, а именно повышение эффективности за счет сокращения времени на проведение цикла работы.Указанная цель достигаетсяв стенде для измерения силовых параметров в резьбовых. соединениях, содержащем основание, мехаййэм контроля с вертикальной геометрической осью, закрепленной на основании, и исполнительный механизм, расположенный над,. Механизмом- контроля саасно с ним, при этом механизмконтроля включает в себя корпус в виде втулки, установленный саасйо в нем с возможностью вращения кальцеабразный столик с упором, опорную шайбу, расположенную соосно столику, датчик момента трения опорной поверхности, закрепленный в корпусе механизма контроля с возможностью взаимодействия с упором кольцеабраэнаго столика, вставку с упором, соосно установленную с возможностью вращения в корпусе механизма контроля под кальцеабразным столиком, датчик момента трения в резьбе, закрепленный в корпу-. се механизма контроля с возможностью взаимодействия с упорОм, вставки; сменныйзамок, закрепленный на:вставке с расположенным вдаль ее аси резьбавым отвер-. стием, и датчик усилия, а:исполнительный механизм выполнен в виде привода, связанного с кааксиально устайовленным во втулке шпинделем, оканчивающимся расположенным внизу ключом, причем шпик- дель выполнен с двумя параллельными перфорированными дисками, каждый из которых соединен с соответствуащим концом расположенйаго между ними. вдоль асй шпинделя тарсиана, а оо втулке исполнительнага механизма размещены с возможностьо взаимодействия с соответствующими и ерфарираван н ыми дисками датчик общего момента и датчик угла поворота,благодаря тому, чта согласно изобретению стенд сйабжен механизмам перемещения, механизмам паджима, горизонтально расположенной плитой и датчиками начального и конечного положения, при этом механизм перемещения выполнен в виде цилиндрического корпуса с резьбовым осевым от- верстием, закрепленного торцом на осйовании, хадаоаго винта, сопряженного с резьбавым отверстием. гильзы, установлен ной с возможностью осевого перемещения на цилиндрическом корпусе и связанном подшипникам качения с хОдОВым Винтом, и1781570 5 бзакрепленного нагильэеприводасэлектро. Шток 18 пневмоцилиндра 17 связан с магнитной муфтой, связачной с ходовым плитой 5, которая установлена в пазах крон- винтом, а механизм поджима" выполнен в штейна 13 с возможностью перемещения.виде пневмоцилиндра, жесгко "соединенно- Кронштейн 13 прикреплен к гильзе 12, На го с гильзой механизма перемещения, с об плите 5 установлены датчик 7 начального ращенным вертикально вниЗ штоком, положения и исполнительный механизм 4, жестко связанным с плитой; датчикконеч- Исполнительный механизм 4 состоит из ного положения установлен с возможно- етулчатого корпуса 21, чувствительного престью взаимодействия с цилиндрическим образователя 22, выполненного в виде торкорпусом и гильзой механизма перемеще сиойного шпинделя с перфорированными ния, а датчик начального положения уста- дисками, фотоэлектрических датчиков 23 и новлен с воэможностью взаимодействия с 24 общего моментаи:угла поворота, На корплитой иторцом кольцеобразного столика пусе 21 размещены привод-электродвигамеханизма контроля, при этом виспол- тель 25, редуктор 26, электромагнитная нительный механизм введена. электромаг муфта 27, Чувствительный преобразователь нитная муфта, связанная с его приводом. и 22 одним иэ концов через электромаг- шпинделем, а втулка исполнительного ме- нитную муфту 27, редуктор 26 связансэлек-ханизма закреплена.на плите, в которой вы- тродвигателем 25, а другим концом с полнено отверстие для ключа, причемключом для затяжки 28. Фотоэлектрические опорная шайба механизма контроля жестко 20 датчики 23 и 24; взаимодействуя с перфозакреплена на его кольцеобразном столике, рированными дискэми, вырабатывают сменный замок выполнен с радиальными сигналы, которые поступают в контрольно; выступами; в вставке выполнены осевое от- . йзмерительную систему 29 (фиг. 8),.состояверстие и сообщенные с ним дуговые на- щую из устройства выделения фазового правляющие пазы с:ответвляющимися 25 импульса 30, генераторов 31 и.32, кйопки вверх радиальными входными отверстйямй "Пуск" 33, делителей четырех разрядных для выступов сменного замка, а датчик счетчиков 34 и 35, индикаторных табло 36 и усилия установлен в основании с возможно.- 37, дешифратора 38, ячейки "ИЛИ" 39, тригстью взаимодействия в осевом направле- герое 40; 41, 42, 43, преобразователя 44 и нии с торцом элемента исследуемого 30 блока индикации 45; Механизм контроля 2 резьбовогосоедийения, .для измерения момента трения в резьбе,Нафиг,1 показан общий видстенда: на момента трения на опорной поверхностифиг, 2 - механизм кОнтроля и исполнитель- -резьбовых деталей болт (винт) - гайка и обный механизм; на фиг, 3 - разрез А-А на фиг. щего усилия затяжки состоит из закладных 2; на фиг,4-разрез Б-Б на фиг,2; на фиг,5 35 образцов(болта) 46 и (гайки) 47, корпуса , - разрез В-В нафиг,2;нафиг.б - разрезГ-Г 48, в верхней части которого размещены на фиг. 1, на фиг, 7 - разрез Д-Д на фиг, 1;: кольцеобразный столик 49 с упором 50 и на фиг. 8 - схема контрольно-измеритель- опора 51, опорная шайба 52 и датчик моменной системы; на фиг. 9. - электрическая схе-та трения опорной поверхности 53, Причем ма управления.40 опорная шайба 52 служит для установкиСтенд содержит основание 1, на кото- контролируемого образца (болта, винта, ром установлены механизм контроля 2 и шпильки) 46, Опора 51 выполнена в виде механизм перемещения 3, Исполнительный упорного шарикоподшипника, а датчик момеханизм 4 установлен на горизонтально мента трения опорной поверхности 53 уста- расположенной плите 5 вместе с механиз .новлен на корпусе 48 и при взаимодействии мом поджима 6, Механизм поджима 6 жес- с упором 50 вырабатывают сигнал, который тко прикреплен к механизму перемещения поступает в контрольно-измерительную си-, 3 и через плиту 5 связан с датчиком 7 на- стему 54 фиг, 8), Кольцеобраэный столик 49 чального положения, Механизм перемеще-с упором 50 установлены на опоре 51 с возния 3 состоит из цилиндрического корпуса 50 можнестью перемещения относительно 8, ходового винта 9, гайки 1.0, датчика корпуса 48 в радиальном направлении, В конечного положения 11, прикрепленного к нижней части корпуса 48 размещены встав- корпусу 8, гильзы 12 и кронштейна 13. На. ка:55 с упором 56, которые установлены гильзе 12 размещены привод-электродвига- в опорах 57, выполненных в виде шари- тель 14, редуктор 15. электромагнитная 55 коподшипников, В вставке 55 установлен муфта 16, которая связана с ходовым еин- сменный замок 58, который может быть изтом 9, К гильзе 12 через кронштейн 13 при- готовлен с резьбовым отверстием из исслекреплен механизм поджима 6, который дуемого материала для контроля имеет корпус пневмоцилиндра 17, шток 18, резьбового соединения типа болт винт) - пружину 19, воздухоподводящую систему корпус, шпилька - корпус. В корпусе 48 жестко установлен датчик 59, а в вставке 55 ремещения 3, Электродвигатель 14 включадатчик 60. Вставка 55 с упором 56 установ- ется церез замкнутый путевой выключатель лены между опорами 57 с воэможностью 77 и систему контактов катушки магнитного перемещения относительно корпуса 48 в ра-пускателя 76 иконтактор 78, Прицем электдиальном направлении и при озаимодейст. родвигатель 14 через редуктор 15 и вклювии с датчиком 59 момента трения в резьбе ценную электромагнйтную муфту 16 (Мр) вырабатывает сигнал, поступающий в вращает ходовой винт 9, Вращаясь по гайке контрольно.-измерительную систему 54 10, ходовой винт 9 перемещает гильзу 12 с (фиг.8), состоящую из входного. устройства установленными на ней кронштейном 13, 61, служащего для согласования входного 10 механизмом поджима 6;механизмом испол- сигнала с датчика 53 со входом-"сумматора нения 4. Перемещение гильзы 12 осуществ, Сумматор 62 выполнен на базе транс- ляется программным обеспецением, форматора,обеспечивающего необходимую которое установлено в устройстве управлеточность суммирования. В контрольно-из- ния. При достижении датчика конечного померительйую систему 54 также. входят уси ложения 11,установленного на корпусе. литель 63, предназначенный длл усиленияпроисходит срабатывание электромагнит- сигнала, поступающего от сумматора . ной муфты 16 при помощи путевого выклю, демодулятора 64, состоящего из комму- чателя (ПВ) 77, размыкающего цепь катушки тирующих ключей, к которому подключен(В) 76. При этом происходит размыкапреобразователь 44 и блок индикации 45. 20 ние между ходовым винтом 9 и редуктором Данная система служйт для измерения мо и выключение электродвигателя (приво- мента трения на опорной поверхности (М,) да) 14. Одновременносэтим сигнал от дати момента трения резьбы (Мр), Блок литания чика 11 подается в систему управления,.65 является источником выпрямленного котораяподает команду на включение злекстабилизированного напряжения и подклю тродоигателл (привода) 25 и команду клапа- .: цен к гейератору 66, содержащего двауси- ну ооздухоподводящей системы 20. лительнцх трансфоРматорских каскада, Включение механизма поджима электрособраннйх на транзисторах. К блоку пита- . двигателя 25 происходит через контактор нил 65 подключен усилитель.63, а генератор ( ПВ) 78 в цепи катушки магнитного пускате-66 - к датчику 59, который, в свою очередь, 30 ля (2 В) 79 Вращаясь электродвигатель 25 через входное устройство 67 подключен к" через редуктор 26 и электромагнитную муфсумматору 62 и через усилитель 63 к демо- ту 27 передает вращение чувствительному дулятору 64. Данная система используется преобразователю 22, выполненному в виде . для измерения момента трения в резьбе - упругого рессорного шпинделя с перфо(Мр). Датцик 60, установленный внутри 35 рирооанйцми дисками, и ключу 28, В это вставки 55; солзай сторцом резьбовай части " время сигнал от устройства программного образца(болта, винта)46 содной стороны и упраоленйя поступает на клапан воздуходатчиком 7 с другой. При этом датчйки 7 и подводящей системы 20 источника первиц 60 образуютсигнальг, которые йоступаютв ной энергии, затем на распределитель контрольно-измерительную систему 54, со энергии управляющего двигателем .преобстоящую из входных устройств 67, 68, сум- разователя энергии, где пневматическая матора 69, усилителя 70, демодулятора 71, энергия воздуха преобразуется в механичеблока питания 72, генератора 73, который о скую энергию поступательного движения свою очередь связан с датцикамл 7 и 60, поршня, выпуская воздух из пнеомоцилинСигналь от демодуляторов.64 й 71 постуйа дра 17 и под действием пружины 19 осущеют в аналоговгяй цифровой преобразова- ствляет плавное перемещение штока 18 и тель 44, а от него на блок индикации 45. плиты 5. Перемещение штока поршня 18 с Контрольно-измерительная система 54 соя- плитой 5, и установленными на ней мехазана с электрической схемой автоматизиро- низмом исполнения 4 и датчиком нацальнованного управления 74 (фиг, 9). 50 го положения 7 осуществляется до тех пор, Электрическая схема 74 состоит из электро- пока головка испытуемого образца не войдвигателей 14 и 25, электромагнитных муфт дет в зев ключа, а датчик начального поло и 27; кнопки "Пуск" 75, катушки магнит- женил 7 не соприкоснется с торцовой ного пускателя 76, путевого выключателя 77, поверхностью кольцеобразного столика 49, контактора 78, катушки магнитногопускате после чего произойдет выключение подачи ля 79, тепловых реле 80 и 81, катушки реле воздуха, оставляя равномерное давление времени 82, кнопки "Стоп" 83, между двумя полостями цилиндра, котороеУстройство работает следующим абра- обеспечивается распределителем энерзом, При нажатии кнопки "Пуск" 75 вступает гии, Одновременно с этим происходит рабоо работузлектродоигатель 14 механизма пе- та исполнительного механизма 4,1781 570 10 9Вращаясь, рессорный шпиндель 22 с клю- ков 34 и 35 поступают на вход делителя. как чом 28 осуществляет завинчивание испыту- для канала момента затяжки:(М,), так и для емогообразца(болта, винта)46 в гайку 47, . канала угла затяжки (р). При достижении установленных соответственно в опорной угла затяжки и момента сигналычерез дешайбе 52 и гайковом замке 47, выбирая 5 шифратор 38 поступают на входы триггеров все зазоры в резьбовом соединении, При 42 и 43. После чего происходит их срабатысоприкосновении датчика начального по- вание, триггера 42 и 43 устанавливаются в ложения 7 с торцовой поверхностью коль- нулевое положение и поступление импульцеобразного столика 49 подается команда сов на вход ячейки ИЛИ 39 прекращается, на включейие контрольно-измерительной 10 При этом на блоке индикации 45 высвечивасистемы 29 и 54,.которая используется для ются показатели полученных значений по.одновремейного определения общего мо-. моменту затяжки (М,) и углу поворота ( р).мента затяжки (М,), угла поворота ф, мо- . Одновременно с измеренйем общего момента трения в резьбе (Мр), момента трения мента затяжки и угла поворота в контроль- на опорной поверхности (Мт) и.усилия за но-иэмерительной системе:29, связанной стяжки (Оэ). Определение общего момента контрольйо-измерйтельной системой 54,затяжки(М) и угла поворота(р) осуществ-производятся измерения иконтроль, моляется при помощи контрольно-измери-.мента трения в резьбе(Мр),моментатрения тельной "системы (фиг, 8), в которой на опорной поверхности (М) и общего использованы фотоэлектрические датчики 20 усилия затяжки (О 3). Измерение момента 23 и 24, выполненные на фотодйодах ФД 1 и трения на опорной поверхности произво:. перфорированных дисках, В качестве источ- дится следующимобразом, В процессе заника света. используются миниатюрные тяжки образуетсямомент трения на лампы накаливания (полупроводниковые опорной поверхности:испытуемото образца светодиоды); В процессе работы происхо. (болта) 46, который передается через опор.дит формирование импульсов, которые по-: ную шайбу 52, кольцеобраэный столик 49 и ступают -в устройство 30 выделения упор 50 на датчик 53,:Для исключения.трефазового импульса; состоящее из двух Р- ния между кольцеобразным столиком 49 с триггеров и двух ячеек И, После выделения упором 50 и корпусом 48 установлен одно- . фазового импульса происходит" его. эа- ЗО рядный упорный шарикоподшипник 51,полнение:от опорного генератора 31 для . Датчик ЗЗ вырабатывает сигнал,поступаю- момента и опорного генератора 32 для угла щий в контрольно-измерительную систему поворота импульсами, эквивалентными 54, и через входное устройство 61, сумматор . единичному значению момента и угла пово, усилитель 63, демодулятор 63 передает- рота. Заполнение происходитвячейке И, На 35 ся в преобразователь 44, где аналоговый один из.входов этой ячейки поступает сиг- сигнал преобразуется в цифровой и переда-нал.от кнопки "Пуск" 33, Полученная пачка ется в блок индикации 45, измеряя момент импульсов проходит через выделители на .трения на опорной поверхности.(М,). При , вход четырех разрядных счетчиков 34 и 35,.этом блок питания 65 подключен непосредсостояние счетчиков индуцируется на инди ственно к тенератору 66 с одной стороны, а каторное табло 36 и 37. Одновременно сиг- с другой - к усилителю 63, а генератор 66, в налы с выходов счетчика 34,35 поступают на свою очередь, к датчику 53 и к демодулятору декадный дешифратор 38, Дешифратор 64, Одновременносизмерениеммомента 38 через коммутацйонное поле связан "с трения на опорной поверхности образ- ячейкой ИЛИ 39. и позволяет установить 45 ца происходит иэмерейиемомента трения в полученные величины момента затяжки резьбе(МР) и усилия затяжки(03), Измере(Мз), так как аналоговые системы, входящие ние момента трения в резьбе осуществляет- .в устройство преобразователя 44,.преобра-: ся в процессе перемещения исследуемого эуют аналоговые сигналы в цифровые, кото- абразца (болта) 46 по закладной детали (гай:рые поступают в блок индикации 45, При 50 ки) 47,устанавливаемой в сменном замкедостижении значения момента затяжки(М 3) 58. Возникающий между исследуемыми обсигнал опрокидывает триггера 40,41, Анало- раэцами момент трения в резьбе поворачигично работает канал измерения угла затяж- вает вставку 55 с упором 56 и со сменным ки. Отличие состоит в том, что импульсы с: замком 58 относительно датчика 59. Встав- формирователя датчика Р 1 поступают на 55 ка 55 с упором 56 воздействует на датчик 59.один из входов ячейки И, размещенного в Вырабатываемый при этом сигнал поступасчетчике 34,йдругойвходсвязанскнопкой . ет через входное устройство 67, сумматор "Пуск" 33, на который поступает команда от 62, усилитель 63, демодулятор 64 в преобраданной кнопки, и импульсы выхода счетчи- зоеатель 44, где аналоговый сигнал преоб1 И 0 11аэ ется в цифровой и передается в блок корпусе механизма контроля.под кольцеобиндикации 45, который показывает получен- разным столиком, датчик момента тр ения в ное значение момента трения в резьбе(Щ резьбе, закрепленный в корпусе механизма Генератор 66 подключен к датчику 59. Изме- контроля с возможностью взаимодействияение усилия затяжки СЬ) в реэьбовом 5 с упором вставки, сменный замок, эакрепрение усили зсоединении происходит .одновременно . ленный на вставке с расположенным вдоль с измерением момента трения на опорной ее оси резьбовым отверстием, и датчик усиповерхности образца и момента трения в лия, а исполнительный. механизм выполнен резьбе, Это измерение осуществляется сле- в виде привода; связанного с коаксиально дующим образом. От связанных с опорной 10 установленным во втулке шпинделем,поверхностью головкй образца 46 и с его оканчивающимся расположенным внизу торцовой поверхностью ножки датчиков 7 и ключом, причемшпиндель выполнен с дву ситналы через входные устройства 67,68, мя параллельными перфорированными диссумматор 69, усилитель 70, демодулятор 71 ками, каждый из которых соединен с поступают в преобразователь 44, где анало соответствующим концом расположенного говый сигнал преобразуется в цифровой, а между ними вдоль оси шпинделя торсиона. от него - в блок индикации 45, который а во втулке исполнительного механизма. показывает общее усилие затяжки (СЬ) для размещены с возможностью взаимодейсто разца; ри этб ца; П и этом блок питания 72 подклю- . вия с соответствующими перфорированнычен к генератору 73. Генератор 73, в свою 20 ми дисками датчик общего момента и очередь, подключен не только к датчикам 7 датчик угла поворота, о т л и ч а ю щ и й с я и 60,но и к демодулятору 71, а блок питания тем; что; с целью повышения эффективности- кусилителю 70., При достиженииуста- за счет сокращения времени на проведение новленных параметров сигнал от электрон- цикла работы, он снабжен механизмом йой системы управления 74 через датчик 7 25 перемещения, механизмом поджима, гори- передается на блок контакт (1 Н) 77 и через зонтально. расположенной плитой и датчикатушку м гнитно и дагнитного пускателя 79 включает ками начального .и конечного положения, . двйгатель с обратным вращениеМ ротора; при этоммеханизм перемещения выполнен осуществляя подъем измерительной систе- в виде цилиндрического корпуса с.резьбомы в исходное положение. Подъем измери вым осевым отверстием, закрепленного тельной системы регулируется реле торцом на основании, ходового винта, сов емени 82, после чего срабатывает кнопка пряженного с резьбовым отверстием, гиль- ,"Стоп" 83, производя отключение всей сис- зы, установленной с возможностью осевого темы. Тепловые реле 80 и 81 используются перемещения на цилиндрическом корпусе иредохранения стенда от перегрузок в 35 связанной подшипником качения с ходовым "электрической цепи электродвигателя. винтом, изакрепленногона гильзе р дТ браэом эа счет механизации под- . с электромагнитной муфтой, связанной с ховода и отвода ключа изобретенйе"йозволяет довым винтом, а механизм поджимасократитьциклработы,обесп чиваятемса- нен в вйде пневмоцилиндра, жестко мым высокую эффективю эффективность стенда для из соединенного с гильзой механизма,перемемерения силовых параметров в резьбовых щения, с обращенным вертикально вниз соединениях, штоком, жестко связанным с плитой, датчикФ о м л а и з о б р е т е ни я . конечного положения установлен с воэ- Сля измерения силовых.парамет- можностью взаимодействия с цилиндричете ддров в резьбовыхсоединениях, содержащий 45 ским корпусом и гильзои меха основание, механизм контрбля"с вертикаль- перемещения, а датчик начального положеной геометрической осью, закрепленный на йия,установлен с возможностью взаимодейосновании, и исполнительный механизм, ствия с плитой и торцом кольцеобразного расположенный над механизмом контроля стОлика механизма контроля, при этом в соосно с ним, при этом механизм контроля 50 исполнительный механизм введена электвключает в себя корпус в вйде"втулки, устг- ромагнитная муфта, связанная с его привоновленный сбосно в йем с возможностью домишпинделем,автулкаисполнительного вращения, кольцеобразный столик с упо- механизма закреплена на плите, в которойную шайбу, расположенную соос- .выполнено отверстие для ключа, прио с ликом датчик. момента трения 55 чем опорная шаиЬа механизма о рк нт Оля жеопорной поверхности, эакрспленный в кор- стко закреплена на его кольцеобр пусе механизма контр ляа контрогя с возможностью стблике, сменный замок выполнен с ради- взаимодействия с упором кольцео раэпором кольцеобраэ- " альнымл выступами, во вставке выполнены ного столика, вставку супором, соосно ус- осеьое отверстие и сообщенные с ним дуготановлбнную с возможе ю с возможностью вращения в вые направляющие пазы с ответвляющимися вверх радиальными входными отверстиями для выступов сменного замка, а датчик усилия установлен в основании с возможностью взаимодействия в осевом направлении с торцом элемента исследуемого резьбового соединения.
СмотретьЗаявка
4906494, 30.01.1991
МОСКОВСКИЙ АВТОМЕХАНИЧЕСКИЙ ИНСТИТУТ
БОБРОВ ВЛАДИМИР НИКОЛАЕВИЧ
МПК / Метки
МПК: G01L 5/16
Метки: параметров, резьбовых, силовых, соединениях, стенд
Опубликовано: 15.12.1992
Код ссылки
<a href="https://patents.su/12-1781570-stend-dlya-izmereniya-silovykh-parametrov-v-rezbovykh-soedineniyakh.html" target="_blank" rel="follow" title="База патентов СССР">Стенд для измерения силовых параметров в резьбовых соединениях</a>
Механизм радиусного упора к станку для навивки пружин

Номер патента: 527235
Опубликовано: 05.09.1976
Автор: Резанов
МПК: B21F 35/00
Метки: механизм, навивки, пружин, радиусного, станку, упора
...работает следуюшим образом.5Поворотом рычага 3 ползун 2 с державкой 6 радиусного упора 7 на валу 4 смещается к зоне навивки пружины и, пока дэуплечий рычаг 5 не встретит на своем пути ограничитель 11, рабочая часть радиусного упора 7 остается ниже подаваемой проволоки. После того как ограничитель 11 зацепит одно плечо двуппечего рычага 5, он при дальнейшем перемещении ползуна 2 повернет вал 4 с державкой 6, пре- б одолевая упругое сопротивление торсионного валика 9, В результате этого поворота рабочая часть радиусного упора 7 будет сначала перемещаться к проволоке, а затем изгибать ее в формообразующем 20 механизме до тех пор, пока радиусныйупор 7 не встанет в рабочее положение . В этот момент сфекращается движение ползуна 2 к зоне...
Механизм фиксации упора

Номер патента: 1739076
Опубликовано: 07.06.1992
Авторы: Комиссаров, Муравьев
МПК: B21D 53/40, F16B 2/14
Метки: механизм, упора, фиксации
...- с наклонной стороной основания, взаимообращенные стороны упора иклика выполнены зубчатыми с профилем зуба упора, идентичным профилю зуба клина,взаимообращенные стороны клина и основания выполнены со смежными пазами, вкоторых размещен подпружиненный упругий элемент, при этом клин и основаниесвязаны крепежными элементами с возможностью перемещения их относитеьно дрдруга, а механизм перемещения клина свзан с основанием,На фиг. 1 изображен предлагаемый механизм, поперечное сечение; на фиг, 2 - видА на фиг, 1.Механизм фиксации упора 1 содержитподпружиненный клин 2, соединенный с основанием 3 крепежными элементами 4 свозможностью перемещения их относительно друг, друга посредством подпружинивающего упруп)го элемента 5...
Устройство для выравнивания величины крутящего момента в часовых механизмах

Номер патента: 93213
Опубликовано: 01.01.1952
Автор: Симчук
МПК: G04B 1/22
Метки: величины, выравнивания, крутящего, механизмах, момента, часовых
...На этой же оси свободно вращается анкерное колесо 5, одна из спиц которого связана спиральной пружиной б с анкерной осью. Зубья анкерного колеса б взаимодействуют с анкерной вилкой 7, сидящей на оси 8.Дополнительная, вторая анкерная вилка 9, не имеющая хвостовой части, также укреплена на осн 3 и взаимодействует со спусковым колесом д, имеющим зубья 10, у которых срезаны плоскости импульсов.Работа устройства происходит следующим образом,Секундное колесо 1 передает усилие на спусковое колесо 3 через триб 2. Спусковое колесо, проворачиваясь вместе с осью 4, закручивает внутренний конец спиральной пружины б. Наружный конец пружины, раскручиваясь, вращает анкерное ко лесо б, свободно вращающееся на оси 4, и через анкерную вилку 7 передает...
Механизм блокировки включения ручных перемещений в реверсивном приводе подач

Номер патента: 207649
Опубликовано: 01.01.1968
Автор: Гкльфман
МПК: B23Q 5/00
Метки: блокировки, включения, механизм, перемещений, подач, приводе, реверсивном, ручных
...рычаг 5 на оси 6, и маховик ручных перемещсний 7, посаженный на валу-муфте 8 в подшипниках 9. Тяга 4 одним концом скреплена с муфтой 1, а на втором ее конце сделан специальный Ъ-образный вырез, воздействующий на плечо двуплечего рычага 5,В среднем положении муфты 1, соответствующем выключенной механической передаче, паз Ч-образного выреза находится против выступа на плече рычага 5. Второй конец этого 5 рычага находится в крайнем правом положении и освобождает муфту 8, которая в этом положении соединяется с валом-муфтой 8, включая ручную подачу, В крайних положениях муфты 1, соответствующих включению 10 механической подачи, выступ рычага 5 находится на полках выреза, а второе плечо - в левом положении. При этом рычаг отжимает муфту 3,...
Устройство для сборки оксидно-полупроводниковых конденсаторов, механизм для установки изоляторов на выводы секций оксидно-полупроводниковых конденсаторов и механизм для установки шайб припоя в корпуса оксидно п

Номер патента: 1262586
Опубликовано: 07.10.1986
МПК: H01G 13/00
Метки: выводы, изоляторов, конденсаторов, корпуса, механизм, оксидно, оксидно-полупроводниковых, припоя, сборки, секций, установки, шайб
...упругого материала (резины). Под лотком вибробункера 36 размещены центрирующие гребенки 43 и 44. Приводной механизм 2 содержит кулачковые валы 45 и 46, которые управляют движением всех механизмов устройства посредствем кинематических связей в виде рычагов . и толкателей.Механизм для установки изоляторов 34 на выводы 27 секций конденсаторов содержит лоток 47 вибробункера 35, соединенный гибкой тягой 48 с электромагнитным вибратором 49. Лоток 47 имеет воэможность качания относительно оси 50, величина которого ограничена винтом 51, На нижней поверхности лотка 47 выполнен паз 52, дно 53 которого имеет скос 54, направленный в сторону установленных на выходе лотка 47 элементов фиксации изоляторов 34, выполненных в виду двух призматических...
Предыдущий патент: Способ определения удельной мощности затрачиваемой машинно тракторным агрегатом на обработку материала
Следующий патент: Датчик для измерения давления
Случайный патент: Генератор случайных чисел