Устройство программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
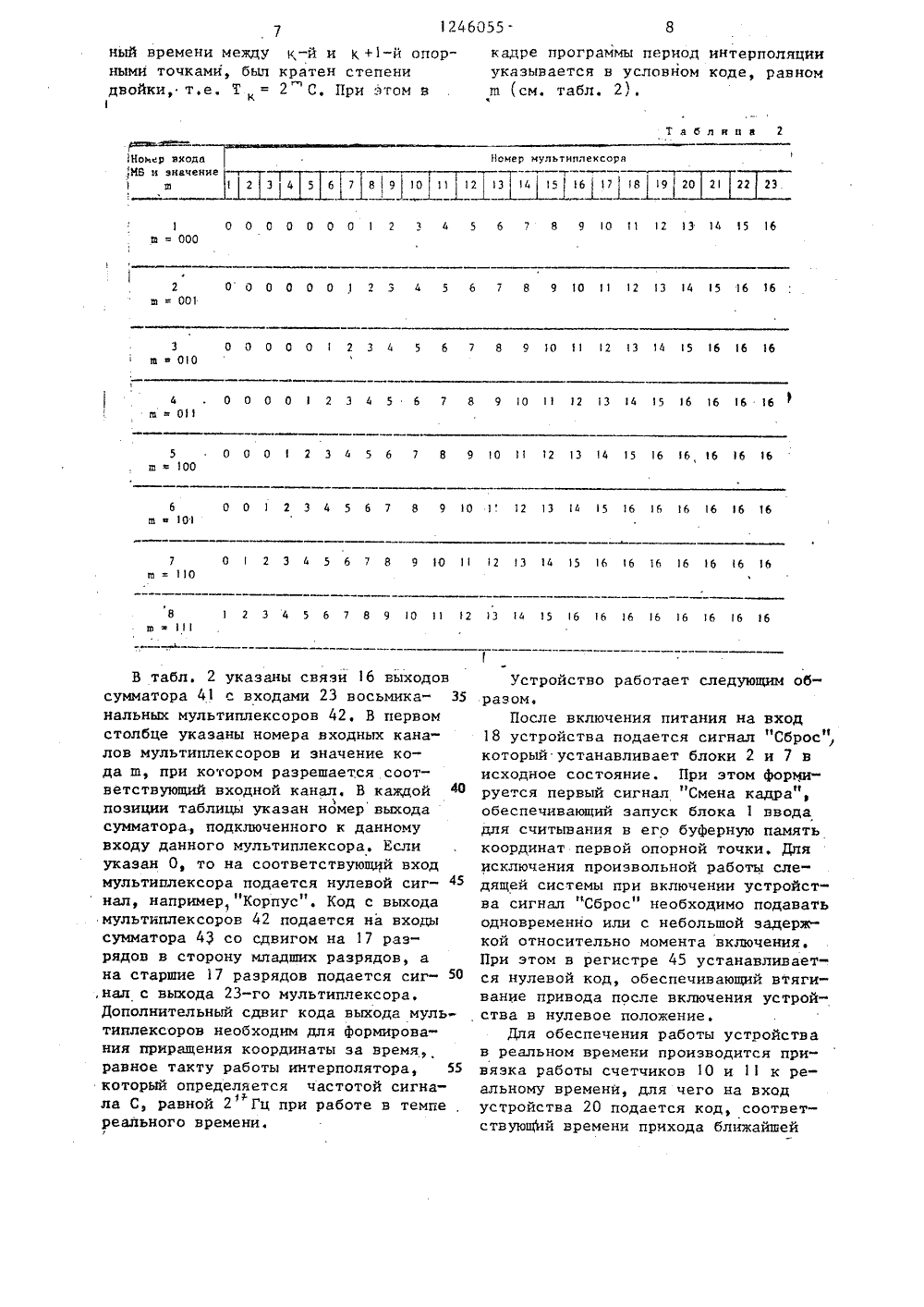

Текст
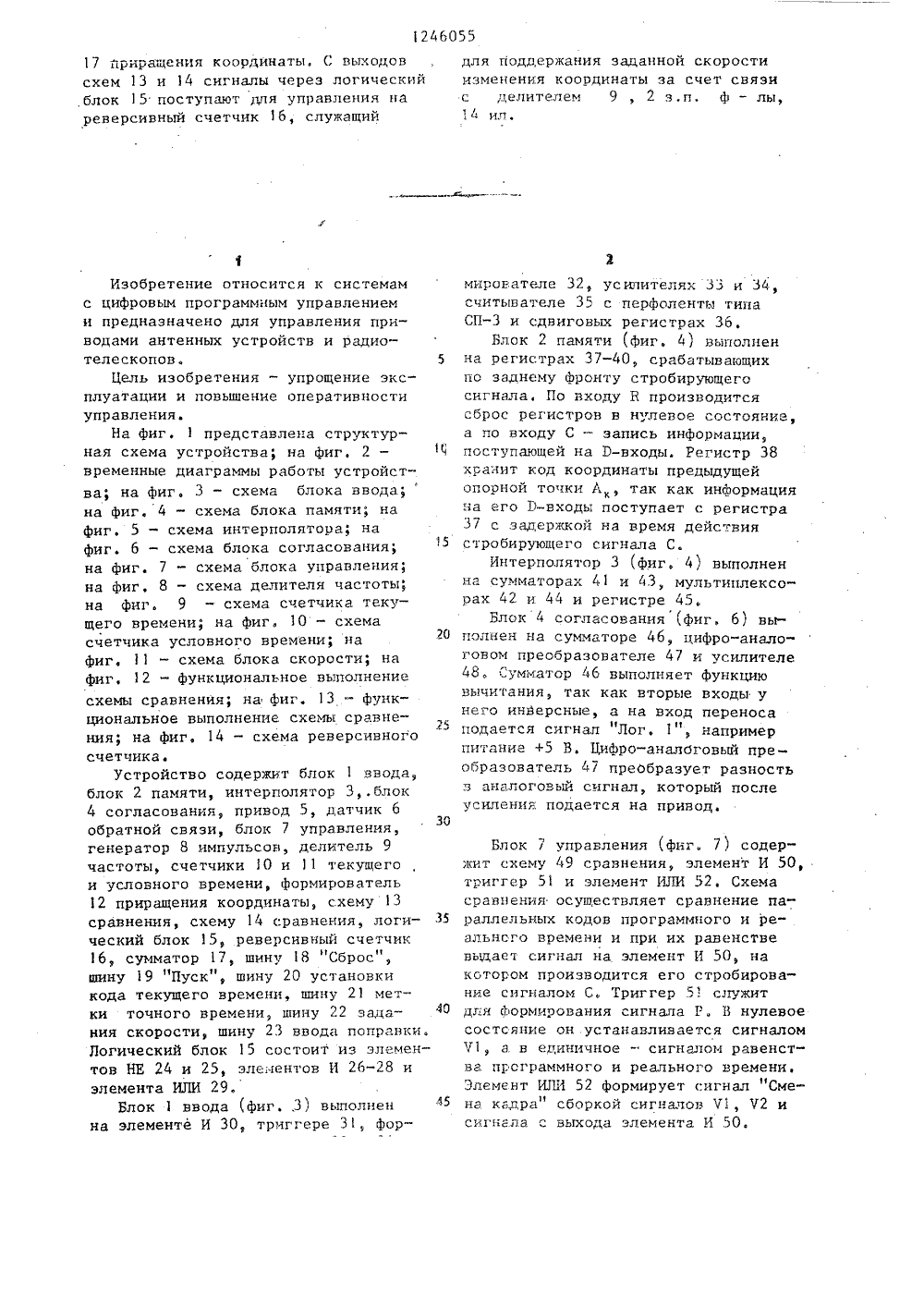
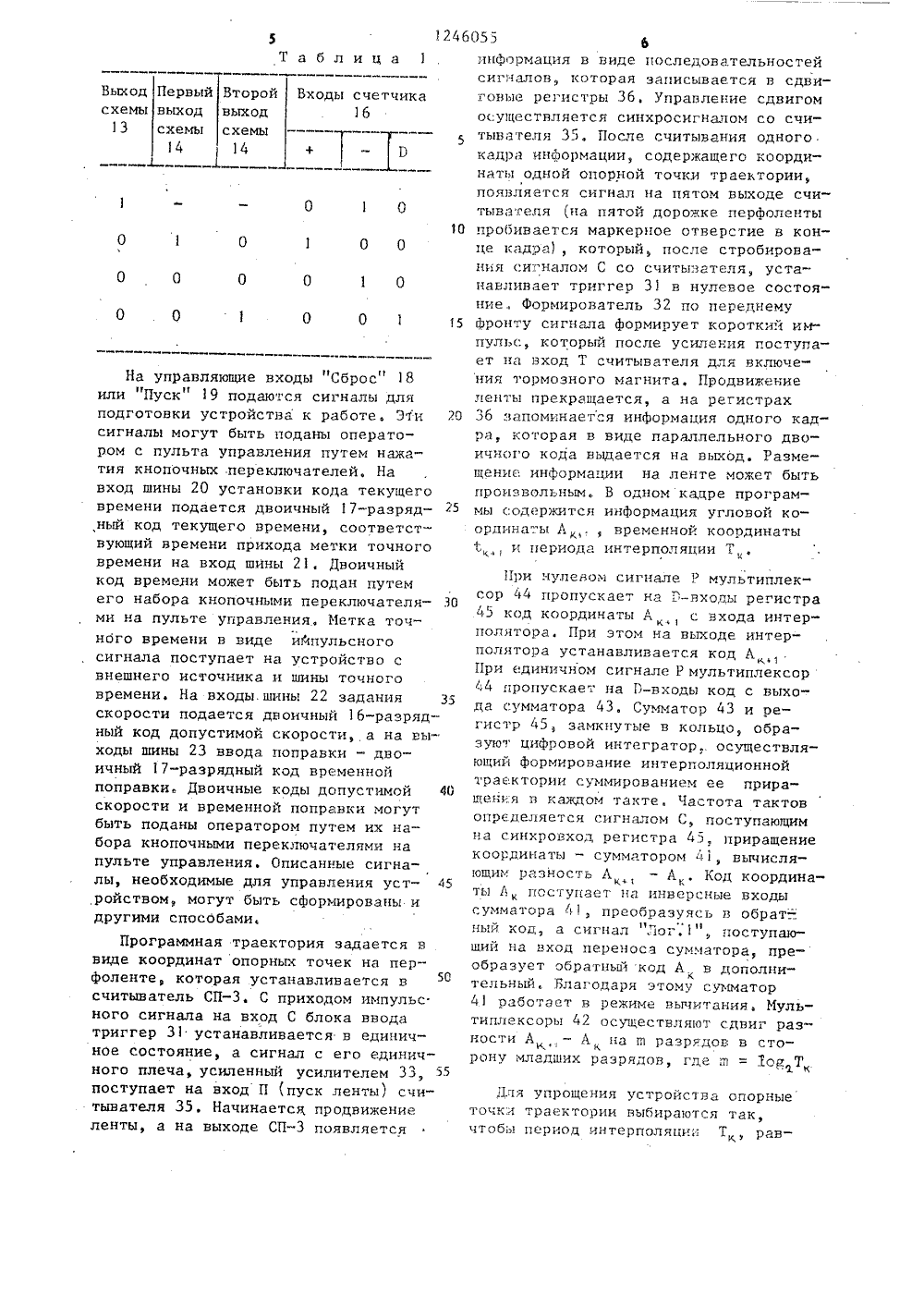
(5 СКОМ;Ф С ийГорьОГРАММНОГО УПРАВ- тносится к систеграммным управлео для управления устройств и радио яет упрос ть(57) Изобрет мам с цифров нием, предна приводами ан телескопов и ие про аче сравне енныхпозвол ти ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ 21) 3825474/24-2422) 10,12.84(71) Горьковский исследовательскфизико-технический институт приковском государственном университетим. Н, И. Лобачевского(56) Авторское свидетельство СССРВ 519685, кл. О 05 В 9/18, 1973.Белянский П. В. и Сергеев Б. Г.Управление наземными антеннами ирадиотелескопами. - М.: Сов, радио,980, с, 102,(54) УСТРОЙСТВО ПРЛЕНИЯ эксплуатацию и повысить оперативность управления. Сигналом "сброс"с входа 18 блок 2 памяти и блок 7 управления устанавливаются в исходное состояние и при этом формируется первый сигнал смена кадра в блоке 7, обеспечивающий запуск блока 1 ввода, информация с которого записывается в блок 2, с которого поступает через интерполятор 3 и блок 4 согласования на привод 5, механически связанный с датчиком 6 обратной связи. Генератор 8 импульсов соединен с делителем 9 частоты и счетчиком 10 текущего времени, работающим синхронно со счетчиком 11 условного времени. Информация со счетчиков 1 О и 1.поступает на блок 7 и через сум матор 17 - на входы второй схемы 14ния. На входы первой схемы 13 сравнения информация поступает с ннтерполятора 3 через формирователь/5 Производственно-полиграФическое предприятие, г, .жгоу; Проектная,Тираж 836 ВНИИПИ Государствен по делам изобрете 113035, Москва, ЖПодписноекомитета СССРи открытийшская наб., д.1246055 17 приращения координаты, С выходовсхем 13 и 14 сигналы через логическийблок 15 поступают для управления нареверсивный счетчик 16, служащий Изобретение относится к системам с цифровым программным управлением и предназначено для управления приводами антенных устройств и радиотелескопов.Цель изобретения - упрощение эксплуатации и повышение оперативности управления.На фиг. 1 представлена структурная схема устройства; на фиг. 2 временные диаграммы работы устройства; на фиг, 3 - схема блока ввода.;на фиг. 4 - схема блока памяти; на фиг. 5 - схема интерполятора; на фиг. 6 - схема блока согласования; на фиг. 7 - схема блока управления; на фиг, 8 - схема делителя частоты, на Фиг. 9 - схема счетчика текущего времени," на Фиг. 10 - схема счетчика условного времени; на фиг. 11 - схема блока скорости; на фиг, 12 - функциональное выполнение схемы сравнения; на фиг, 13 - функциональное выполнение схемы сравнения; на фиг. 14 - схема реверсивного счетчика.Устройство содержит блок 1 ввода, блок 2 памяти, интерполятор Зблок 4 согласования, привод 5, датчик 6 обратной связи, блок 7 управления, генератор 8 импульсов, делитель 9 частоты, счетчики 10 и 11 текущего и условного времени, формирователь 12 приращения координаты, схему 13 сравнения, схему 14 сравнения, логический блок 15, реверсивный счетчик 16, сумматор 17, шину 8 "Сброс", шину 19 "Пуск", шину 20 установки кода текущего времени, шину 21 метки точного времени, шину 22 зацания скорости, шину 23 ввода поправки, Логический блок 15 состоит из элементов НЕ 24 и 25, элементов И 26-28 и элемента ИЛИ 29.Блок 1 ввода (фиг 3) выполнен на элементе И 30, триггере 31 фордля поддержания заданной скорости изменения координаты за счет связи с делителем 9 , 2 з,п. ф - лы, 14 ил. мироватсле 32, усилителях 33 и 34,считывателе 35 с перфоленты типаСПи сдвиговых регистрах 36.Блок 2 памяти (фиг. 4) выполнен5 на регистрах 37-40, срабатывающихпо заднему фронту стробирующегосигнала, По входу Б производитсясброс регистров в нлевое состояние,а по входу С - запись информации,поступающей на В-входы. Регистр 38хранит код координаты предыдущейопорной точки А так как информацияна его 1)-входы поступает с регистра37 с задержкой на время действия15 стробирующего сигнала С.Интерполятор 3 (фиг. 4) выполненна сумматорах 41 и 43, мультиплексорах 42 и 44 и регистре 45Блок 4 согласования (Фнг, 6) вы 20 полнен на суьиаторе 46, цифро-аналоговом преобразователе 47 и усилителе48, Сумматор 46 выполняет функциювычитания, так как вторые входы унего инверсные, а на вход переноса25 подается сигнал "Лог. 1", напримерпитание +5 В. Цифро-аналоговый преобразователь 47 преобразует разностьз аналоговый сигнал, который послеусиления подается на привод.30 Блок 7 управления (фиг. 7) содержит схему 49 сравнения, элемент И 50,триггер 51 и элемент ИЛИ 52. Схемасравнения осуществляет сравнение па раллельных кодов программного и реальнсго времени и при их равенствевыдает сигнал на элемент И 50, накотором производится его стробирование сигналом С. Триггер 51 служит 40 для формирования сигнала Р. В нулевоесостояние он устанавливается сигналом71, а в единичное - сигналом равенства программного и реального времени.Элемент ИЛИ 52 формирует сигнал "Сме на кадра" сборкой сигналов 71, 72 исигнала с выхода элемента И 50.3 1Делитель 9 частоты (фиг. 10) выполнен на счетчике 53 с переменным коэффициентом деления. На вход Т поступает частота с тактового генератора, равная 2 Гц, а на выходе формируется импульсный сигнал с частотоййа АГ = 2 ГЦ - , где А - двоичный ше 2стиразрядный код управления, поступающий на Р-вход. Делитель 9 может быть выполнен на одной микросхеме К 155 ИЕ 8. При поступлении на Р-вход кода А = 001000 на выходе делителя17будет сигнал частотой 2 Гц.Счетчик 10 текущего времени (фиг. 9) выполнен на двоичных счетчиках 54-56. Счетчик 54 имеет десять двоичных разрядов, с его вьгхода сни 1 О мается сигнал с частотой 2Гц. Счетчик .55 имеет также десять разрядов, с его выхода снимается сигнал с частотой 1 Гц, Счетчик 56 имеет 17 разрядов и выполнен с обратной связью, обеспечивающей счет до 24 часов. При подаче на вход С метки точного времени производится зануление счетчиков 54, 55 и установка в счет чик 56 кода поданного на входы Р 1- Р 17.Счетчик 11 условного времени (фиг. 10) выполнен на семнадцатиразрядных двоичных счетчиках 57 и 58. Счетчик 58 выполнен с обратной связью и осуществляет счет времени до 24 часов. При поступлении на вход с метки точного времени счетчик 57 зануляется, а в счетчик 58 записывается код времени, подаваемый на входы Р 1- Р 17.Формирователь 12 приращения координаты (фиг. 11) выполнен на регистрах 59 и 60, срабатывающих по заднему фронту стробирующего сигнала, и сумматоре 61. На вход С поступает сиг 1 онал с частотой 2 Гц, который записывает в регистры 59 и 60 два соседних значения расчетной координаты, Сумматор 61 выполняет вычитание иэ расчетной координаты, записанной в регистр 59, ее предыдущего значения, записанного в регистр 60. На выход формирователя 12 с сумматора 61 выдаются шестнадцать младших разрядов кода, который равен скорости изменения расчетной координаты.Схема 13 сравнения (фиг. 12) выполнена на инверторе 62, группе из 15 элементов ИСКЛЮЧАЮЩЕЕ ИЛИ 63 и 246055сумматоре 64. Схема сравнения осуществляет сравнение модулей скоростей.Если код скорости, поступающий повходу А, имеет отрицательный знак(старший разряд равен "1"), то онна сумматор поступает без изменений..Если код скорости по входу А имеетположительный знак, то на выходе инвертора 62 устанавливается единичный 1 О сигнал, поступающий на вход переносасумматора и на .вторые входы элементовИСКЛЮЧАЮЩЕЕ ИЛИ 63, Входной код скорости, проходя через элементы 63, инвертируется, а сумматор осуществляет 15 вычитанИе из кода, поступающего повходу Б. Если код, поступающий повходу А, больше кода скорости, поступающего по входу Б, то код разностиотрицательный, а старший разряд раз ности на выходе сумматора единичный,Схема 14 сравнения (фиг. 13) выполняет операцию сравнения двух 16-разрядных кодов и может быть выполнена на цифровом компараторе 65., 25 Счетчик 16 (фиг, 14) является реверсивным. Элементы И 66 и 67 коммутируют счетный импульс в канал Т"+" -или Т"-" счетчика 69 в зависимостиот наличия сигналов управления +или "-". Если указанные сигналы отсутствуют, то счетчик 69 не считает.Счетчик 69 имеет 6 разрядов, На входыР 6-Р поступает код 001000 путем подачи на них постоянных уровней сигналов.35Элемент И 68 осуществляет стробирование сигнала по входу Р тактовымсигналом С. При появлении сигнала Рсчетчик 69 принудительно устанавли 4 О вается в состояние 001000. При поступлении сигналов счет + или счетИ 11счетчик от состоянйя 001000 считает в сторону увеличения или уменьшения кода, но при достижении им со 45 стояний 000000 или 11111 его работапрекращаетсяЭлементы ИЛИ 70 и И-НЕ71 обеспечивают запрет счета в соответствующих направлениях при переполнении счетчика,Генератор 8 (фиг. 1) обеспечиваетформирование высокостабильного такто. -2 ового сигнала с .частотой 2 Гц,Логический блок 15 управляет 55 счетчиком 16,Логические элементы 24-28 обеспечивают работу блока в соответствиис табл. 1;1246055Ь1 информация в виде последовательностейсигналов, которая записывается в сдвиговые регистры 36. управление сдвигом осуществляется синхросигналом со считывателя 35. После считывания одного кадра информации, содержащего коорди 5 Таблица Первыйвыходсхемы Второйвыходсхемы Входы счетчика 16Выходсхемы13 1414 10 О О О О О 1 О О О 1 О О На управляющие входы "Сброс" 18 или "Пуск" 19 подаются сигналы для подготовки устройства к работе. Эти О сигналы могут быть поцаны оператором с пульта управления путем нажатия кнопочных переключателей, На вход шины 20 установки кода текущего времени подается двоичный 17-разрядный код текущего времени, соответствующий времени прихода метки точного времени на вход шины 21. Двоичный код времени может быть подан путем его набора кнопочными переключателя- ЗО ми на пульте управления. Г 1 етка точного времени в виде импульсного сигнала поступает на устройство с внешнего источника и шины точного времени. На входы. шины 22 задания 35 скорости подается двоичный 16-разрядный код допустимой скорости, а на выходы шины 23 ввода поправки - двоичный 17-разрядный код временной поправки. Двоичные коды допустимой 40 скорости и временной поправки могут быть поданы оператором путем их набора кнопочными переключателями на пульте управления. Описанные сигналы, необходимые для управления уст ройством, могут быть сформированы и другими способами. Программная траектория задается в виде координат опорных точек на перфоленте, которая устанавливается в считыватель СП. С приходом импульс. ного сигнала на вход С блока ввода триггер 31 устанавливается в единичное состояние, а сигнал с его единичного плеча, усиленный усилителем 33, 55 поступает на вход П пуск ленты) считывателя 35. Начинаетсц процвижение ленты, а на выходе СПпоявляется наты оцной опорной точки траектории,появляется сигнал на пятом выходе считывателя (на пятой дорожке перфолентыпробивается маркерное отверстие в конце кадра), который, после стробирования сигналом С со считывателя, устанавливает триггер 31 в нулевое состояние Формирователь 32 по перецнемуфронту сигнала формирует короткий импульс, который после усиления поступает на вход Т считывателя для включения тормозного магнита. Продвижениеленты прекращается, а на регистрах36 запоминается информация одного кадра, которая в виде параллельного двоичного кода выдается на выход, Размещение информации на ленте может бытьпроизвольным., В одномкадре программы содержится информация угловой координа".ы А , , временной координаты1 и периода интерполяции 7,При нулевом сигнале Р мультиплексор 44 пропускает на П-входы регистра 45 код координаты Ас входа интерполятора. При этом на выходе интерполятора устанавливается коц А При единичном сигнале Р мультиплексор 44 пропускает на Л-входы код с выхода сумматора 43. Сумматор 43 и регистр 45 замкнутые в кольцо, образуют цифровой интегратор,. осуществляющий Формирование интерполяционной траектории суммированием ее приращения в каждом тактеЧастота тактов определяется сигналом С, поступающим на синхровход регистра 45, приращение координаты - сумматором 41, вычисляющим разность А- А,. Код координаты Л, поступает на инверсные входы сумматора 41, преобразуясь в обрат= ный код, а сигнал "Лог,1" поступающий на вход переноса сумматора, преобразует обратный код А в дополнительный. Благодаря этому сумматор 41 работает в режиме вычитания. Г 1 ультиплексоры 42 осуществляют сдвиг разности А- А . на ш разрядов в сток, крону младших разрядов, где ш = 1 ор Т .1 к Дяя упрощения устройства опорныеточки траектории выбираются так,чтобы период интерполяции Т рав7 124 б 0551-и и К +1-й опоркратен степени2 С, При этом в кадре программы период интерполяцииуказывается в условном коде, равномш (см. табл. 2),ный времени междуными точками, былдвойки, т.е. Таолица 2, зйзВйй.е;е-.1 Номер анода Номер мультиплексоразц 1 5 6 /1 в0 0 0 0 0 0 О 1 2 Э 4 5 б 7 15 1 9 10 1 1 12 ш = 0 1 Э 4 5 6 6 0 0 1 2 5 6 7 8 9 16 1 12 13 14 15 16 1 2 Э 4 4 0ш = О 7 82 3 16 16 16 16 5 0 100 6 7 О 9 1 О 1 6 0ш фф 10 13 14 15 16 16 16 1 5 6 7 2 Э 0 11 12 13 14 15 1 8 16 16 16 16 16г Э 10 11 12 13 14 15 1 б 16 16 16 16 16 16 эи 16 выходов3 восьмика 42. В первом Устройство работает следующим образом.После включения питания на вход 18 устройства подается сигнал "Сброс" который устанавливает блоки 2 и 7 в исходное состояние. При этом форьируется первый сигнал Смена кадрае, обеспечивающий запуск блока 1 ввода для считывания в его буферную память координат первой опорной точки. Для исключения произвольной работы следящей системы при включении устройства сигнал "Сброс" необходимо подавать одновременно или с небольшой задержкой относительно момента включения. При этом в регистре 45 устанавливается нулевой код, обеспечивающий втягивание привода после включения устройства в нулевое положение.Для обеспечения работы устоойства в реальном времени производится привязка работы счетчиков 10 и 11 к реальному времени, для чего на вход устройства 20 подается код, соответствующий времени прихода ближайшей одных каначение кода ш, при котором разрешается соответствующий входной канал. В каждой 4 Опозиции таблицы указан номер выходасумматора., подключенного к данномувходу данного мультиплексора. Еслиуказан О, то на соответствующий входмультиплексора подается нулевой сигнал, например 7 "Корпус". Код с выходамультиплексоров 42 подается на входысумматора 4) со сдвигом на 17 разрядов в сторону младших разрядов, ана старшие 17 разрядов подается сиг,нал с выхода 23-го мультиплексора,Дополнительный сдвиг кода выхода мультиплексоров необходим для формирования приращения координаты за время,равное такту работы интерполятора, 55который определяется частотой сигнала С, равной 2 Гц при работе в темпе,реального времениИ 8 и значение -т - т 1 -1 и ) 23 4 5 617 2 0 0 0 О 0 0,1 2 3ш : ОО В табл. 2 указаны свсумматора 41 с входаминальных мультиплексоровстолбце указаны номералов мультиплексоров и з 9 10 11 12 13 14 15 11246055 10 9метки текущего времени, например 5 минутной меткиВход 21 устройстваподключается на время привязки к внешнему источнику точного времени. Сприходом импульсного сигнала на вход21 устройства в счетчики 10 и 11 записывается код времени, подаваемыйна вход 20 устройства, и начинаетсясчет реального и условного времени.При этом счетчик 16 принудительно. 10поддерживается в состоянии 001000,так как на выходе схемы 13 сравнениянулевой сигнал, а на втором выходесхемы 14 сравнения - единичный, навыходе делителя 9 присутствует сигнал с частотой 2 Гц, а счетчики 1 Ои 11 работают синхронно,После подачи на вход 19 устройства сигнала "Пуск" на выходе блока7 формируется второй сигнал "Смена 20кадра", обеспечивающий запись координат первой опорной точки в блок 2памяти и запускающий блок 1 вводадля считывания 2-й опорной точки. Сблока 2 памяти угловые координатыи период интерполяции поступают наинтерполятор 3, а координата времени - на блок 7,На выходе интерполятора появляется код координаты первой опорной точ ки, так как сигнал Р=О обеспечивает,передачу кода из регистра 37 блокапамяти в регистр 45 интерполятора.При этом произойдет втягивание привода в первую опорную точку, 35 В блоке 7 осуществляется сравнение реального и программного временипервой опорной точки. При их равенстве появляется третий импульс "Смена кадра" и сигнал Р, разрешающийработу интерполятора. Интерполяторначинает формировать текущее программное значение координаты с шагом,квантованияопределяемым тактовымсигналом, поступающим со счетчикаусловного времени 11, 26 старшихразрядов текущего значения программной координаты поступают с интерполятора на Формирователь 12 и со 50счетчика 16 старших разрядов - наблок 4 согласования. Следящая система, состоящая из блока 4 согласования, привода 5, датчика 6 обратнойсвязи, отрабатывает текущее значение 55программной координаты,Устройство имеет три основных режима работы,1, Режим работы в обычном темпе, синхронном с текушим временем, осуществляется при условии, что расчетная координата изменяется со скоростью, не превышающей допустимую. В этом режиме код условного времени равен коду суммарного времени на выходе сумматора 17, при этом на втором выходе схемы 14 сравнения присутствует единичный сигнал, а на первом выходе схемы 13 сравнения - нулевые сигналы.,Погический блок 15 выдает единичный сигнал на вход счетчика 16 поддерживая в нем код А 10010001, Делитель 9 частоты при управляющем коде А имеет коэффициент3 зумножения, равный 1/2 , а частота на его выходе равна 2 Гц. При посту 2 Р плении на счетчик 10 частоты 2 Гц,11 а на счетчик 11 частоты 2 Гц счет времени в них происходит синхронно,. что обеспечивает работу устройства в темпе реального времени. При этом код в счетчике 11 отличается от кода в счетчике 10 на постоянную величину равную временной поправке, поданной на вход устройства 23 в ниде двоичного кода.2. Режим работы в замедленном темпе осуществляется при условии, что расчетная скорость больше цопустимой, либо при подаче отрицательной поправки по времени на вход устройства 23.При появлении единичного сигнала на выходе схемы 13 сравнения, сигнализирующего о превышении допустимой скорости, логический блок 15 выдает единичный сигнал на вход и-л счетчика 16. Код счетчика 16, первоначально имевший значение А начинает уменьшаться, уменьшая частоту на выходе делителя 9. Счет условного времени замедляется, соответственно уменьшается частота выдачи сигналов пСмена кадра и частота квантования устройства. В результате этого уменьшается скорость изменения расчетной координаты, вычисляемой блоком 12, 1Благодаря обратной связи, образованной схемами 13 и 14, логическимблоком 15 и счетчиком 16, создаетсяследящий режим, обеспечивающий движение привода в замедленном темпе времени с допустимой скоростью. В этомрежиме осуществляется ограничениерасчетной скорости в пределах допустимой скорости привода, при этомпривоц надежно отслеживает расчетную,меци246координату. Время запаздывания це)смещеция привода цо црограммцой траектории определяется по разностимежду суммарным и условным временем.При вводе отрицательной поправкитакже производится замедление темпаусловного времени, которое можетпривести к полному остацону счетаусловного времени. Уменьшение кодасчетчика 16 в этом случае происходитиз-за того, что. код условного време 1 Они оказывается больше, чем код суммарного времени. В результате этогона логический блок поступает комбинация входных сигналов 000, на коч ц 15торую выдается единичный сигналсчетчика 16, В момент сравнения суммарного кода и кода счетчика 11 схема 14 сравнения выдает сигнал равенства кодов, который, проходя черезлогический блок 15, поступает на20Э-вход счетчика 16, устанавливая внем код А После этого устройство.переходит в режим работы в темпе ре)ального времени с учетом введенной25поправки по времени,3, Режим работы в ускоренном времени ( догон") осуществляется в томслучае, когда программная скоростьменьше допустимой, но наблюдаетсяотставание условного времени от сум 30марного. Такие условия могут возникнуть после прохождения участка с повышенной скоростью, либо при вводеположительной поправки по времени.В этом режиме единичный сигнал появляется на первом выходе схемы 14 сравнения ипроходя логический блок 15,поступает на вход "+" счетчика 16,Код счетчика 16 начинает увеличиваться. Темп условного времени убыстряетОся, что приводит к большей скоростивычислительных процессов в устройстве,В устройсте создается следящийрежим, обеспечивающий "догон" на допустимой скорости. После сравнениякода счетчика 11 с кодом на выходесумматора 17 логический блок 15 выдает сигнал на П-вход счетчика 16, устанавливая в нем код А.50Устройство переходит в режим работы с темпом реального времени, Приэтом если "догон" был после участкас повышенной скоростью, приводит переходит на программную траекторию,а если "догон" был следствием вводаположительной поправки, то приводпереходит на программную траекторию 055 12 с учетом введенной поправки цс цре 1 ременные диаграммы, цредставленцыс ца фиг, 2, поясняют работу устройства ц описаццых режимах.Как винцо из диаграмм, замедление и ускорение счета условного времени приводит к умеьшецию и увеличению частоты квантовация устройства (второй выход счетчика 1), при этом длительность Т периода сигнала, используемого для вычисления скорости, остается постоянной. Ф о р и у л а изобретения 1. Устройство программного управления, содержащее блок ввода, шину сброса, шину пуска, блок памяти, интерполятор, шину установки кода текущего времени, шину метки точного времени, блок согласования, привод, датчик обратной связи, блок управления, шину ввода поправки, генератор импульсов, делитель частоты, счетчик условного времени, информационный вход которого соединен с шиной установки кода текущего времени, являющийся третьим входом устройс.тва, вход синхронизации - с шиной метки точного времени, являющейся четвертым входом устройства, тактовый вход - с выходом делителя частоты, тактовый вход которого соединен с выходом генератора импульсов, первый выход счетчика условного времени соединен с вторым информационным входом блока управления, а второй выход - с входом синхронизации блока управления, первый управляющий вход которого соединен с шиной сброса, являющейся первым входом устройства, второй управляющий вход - с шиной пуска, являющейся вторым входом устройства, первый выход - с входами синхронизации блока ввода и блока памяти, информационный вход которого соединен с выходом блока ввода, первый выход - с информационным входом интерполятора, вход переноса которого соединен с вторым выходом блока управления, а старшие разряды выхода - с соответствующими разрядами первого входа блока согласования, выход которого соединен с входом привода, механически связанного с датчиком обратной связи, выход которого соединен с вторым входом блока согласования, о т л и ч а ю - щ е е с я тем, что, с целью упро,Вых.Р сл щения эксплуатации и повьппения оперативности управлеии, в него введенысчетчик текущего времени, формирователь приращения координаты, две схе-мы сравнения, шина задания скорости,логический блокреверсивный счетчики сумматор, второй вход которого соединен с шиной ввода поправки, являющейся шестым входом устройства, первый вход - с первым выходом счетчикатекущего времени, тактовый вход которого соединен с выходом генератораимпульсов, информационный вход - сшиной установки кода текущего значения, вход синхронизации - с шинойметки точного времени, второй выход -с входом синхронизации формирователя,разряды информационного входа которого соединены с соответствующимистаршими разрядами выхода интерпалятора, выход - с первым входом первойсхемы сравнения, старший разряд выхода которой соединен с третьим входом.логического блока, первый и второйвыходы которого соединены с входамисложения и нычитания,реверсивногосчетчика соответственно, тактовыйвход которого соединен с вторььч.выходом счетчика текущего времени, выход - с информационным входом делителя частоты .вход синхронизации - свыходом генератора импульсов, информационный вход - с третьим выходомлогического блока, первый и второйвходы которого соединены соответственно с выходами превьппения и раненства второй схемы сравнения, первыйвход которой соединен с выходом сумматора, второй вход - с вторым информационным входом блока управления,вход синхронизации которого соединенс входам синхронизации интерполятара,первый управляющий вход - с установачным входом блока памяти, первый информационный вход " с нторым выходом блока памяти, второй вход пернойсхемы сравнения соединен с шиной задания скорости, являющейся пятым5 входом устройства,2 е УСТРОИСГЕО ПО Пе 10 Т Л Ич а р щ е е с я тем, что логический блок содержит два элемента НЕ,три элемента И, элемент ИЛИ, выход10 которога является вьгходом блока,второй вход соединен с входом перного элемента НЕ и является третьим .входам блока, вход второго элементаБЕ является первым входом бгока и15 соединен с вторым входом второгоэлемента И, ньгход которого являетсяпервым выходом блока, а первый входсоединен с первыми входами первогои третьего элементов И и выходам пер2 О наго элемента НЕ, вьсад второго элемечта НЕ соединен с вторым входомперво;.О элемента И выход которогосоединен с первым входом элементаИЛИ, вторым входам блока является25 второй вход третьего элемента И, выход которого является третьим выходом блока,3 Устройство по п, 1, О т л ич а ю щ е е с я тем, что формироЗО ватель п 1 риращения координаты соцержит дна регистра, сумматор, соответствующие младшие разряды выхода которого являются выходом формирователя, вход переполнения формкрователя35подсоединен к шине логической единицы, инверсный вход - к выходу второго регистра, прямой вход - к информационному входу второго регистра ивыходу первого регистра, информациОнный вход которого является информационным входом формирователя, входсинхронизации " входом синхронизацииформирователя и соединен с входомсинхронизации второго регистра,
СмотретьЗаявка
3825474, 10.12.1984
ГОРЬКОВСКИЙ ИССЛЕДОВАТЕЛЬСКИЙ ФИЗИКО-ТЕХНИЧЕСКИЙ ИНСТИТУТ ПРИ ГОРЬКОВСКОМ ГОСУДАРСТВЕННОМ УНИВЕРСИТЕТЕ ИМ. Н. И. ЛОБАЧЕВСКОГО
МАКАРОВ НИКОЛАЙ НИКОЛАЕВИЧ, ЭЙНГОРИН МИХАИЛ ЯКОВЛЕВИЧ
МПК / Метки
МПК: G05B 19/418
Метки: программного
Опубликовано: 23.07.1986
Код ссылки
<a href="https://patents.su/12-1246055-ustrojjstvo-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство программного управления</a>
Устройство сравнения комплексныхвеличин

Номер патента: 849101
Опубликовано: 23.07.1981
Авторы: Заморский, Памфилов, Прокунцев, Чорноус, Шаронов
МПК: G01R 27/06
Метки: комплексныхвеличин, сравнения
...вход нуль-органа 5.Второй гармонический сигнал Ц (фиг.4 а)поступает на входную шину 8 устройства, те. одновременно на входы амплитудного.преобразователя 1 и формирователя 2 импульсов, С первого выходаформирователя 2 импульсов поступаютна управляющий взод ключа 3 прямоугольные импульсы(фиг. 4 в)началакоторых совпадают с моментами переходагармонического сигнала О через нулевой уровень с минуса на плюс или сплюса на минус, а окончания совпадаютс моментами соответственно положительного или отрицательного экстремумов сигнала 0,2С выхода амплитудного преобразователя 1 опорный сигнал О п(фиг. 4 )постоянного уровня, равного амплитуде входного сигнала, через ключ 3 подается на сигнальную шину 14 генератора 4 компенсирующего напряжения.При...
Многоканальное устройство для контроля координат развивающихся трещин

Номер патента: 1046673
Опубликовано: 07.10.1983
Авторы: Бухтияров, Грибов, Кузнецов, Лисунов, Панова, Рахманин, Серьезнов, Стариков
МПК: G01N 29/04
Метки: координат, многоканальное, развивающихся, трещин
...с блоком 12 памяти. Выход блока )2 памяти сое" динеи,с вычислительным блоком 13, в:свою очередь, выход вычислительного блока 13 подключЕн и к вмоду бло" ка 14 сравнения и к первому входу блока 15 совпадений. Выход блока 14 сравнения соедкнен,с вторым входом блока 15 совпадений, выход которого является выходом блока 1 контроля зоны Устройство работает следующий об- разом.Прк возникновении воли напряжения. в исслвдуемом объекте в результате развития пластической деформация кли возникновении микро-кли макродефектов (трещкя) волны, достигая датчи-, ков 5, преобразуются в электрический екгнал, усиливаются усилителем б с фильтром, Усиленные и отфкльтроване ные сигналы Формируются.формирователями 7 в нормированные импульсы. Далее...
Устройство сравнения

Номер патента: 1287096
Опубликовано: 30.01.1987
Авторы: Горяйнов, Остнек, Рираховский, Шлифер
МПК: G05B 1/01
Метки: сравнения
...сравнения, формируемого уст" 55ройством сравнения на выходах 33-37в зависимости от соотношения контролируемого напряжения 13, преобразуемого в код Я , и опорных напряжений жение 13 , достигает величины напряжения 13 с 61 с - , 1 13= 13 с- а 2 =И2 п хю5 где и - число разрядов счетчика 20;Ц - опорное напряжение ЦАП;1 . - номер разряда двоичногочисла;.а - знак ( цифра) двоичной системы счисления, который принимает значения 0 или 1 15"и 1,-1М =Е а 2 код, пропарциональщ 4 ннйй величине напряжения 13 .Импульс 13 з с ныхода компаратора 3 переключает триггер 11, связанный со входом С триггера 1.3, сигнал Б 1, из состояния пО" переходит в состояниеПо фронту переключения сигнала Б в момент 1 в триггере 13 записынается логический уровень сигнала...
Устройство для преобразования координат изображения

Номер патента: 1550504
Опубликовано: 15.03.1990
Автор: Пержу
МПК: G06E 3/00
Метки: изображения, координат, преобразования
...45. По управляющему сигналу, поступающему на вход запуска дешифратора 14, запускается генератор 38 тактовых импульсов. Сигналы с выхода генератора 38 поступают через элемент И 39 на вход счетчика 42 и на регистр 43. Информация с выходов регистров 43 и 45 подается на соответствующие входы группы элементов5 И. 44, которая представляет собой набор двухвходовых элементов И, Количество таких элементов равно числу разрядов регистров 43 и 45. При появлении сигнала на выходе одного или более элементов И группы элементов И 44 появляется сигнал на выходе элемента ИЛИ 41, который через элемент НЕ 40 закрывает по второму входу элемент И 39 и предотвращает дальнейшую передачу тактовых сигналов с выхода генератора 38. В счетчике 42 представлена...
Способ восстановления стереофонического цифрового сигнала, закодированного кодом, обнаруживающим блоки ошибок длительностью не более n символов

Номер патента: 1555884
Опубликовано: 07.04.1990
Авторы: Гитлиц, Добровольский, Зеленин, Попов, Худяков
МПК: H04H 5/00
Метки: блоки, более, восстановления, длительностью, закодированного, кодом, обнаруживающим, ошибок, сигнала, символов, стереофонического, цифрового
...Фронта сигнала на первом входе появляется через время, равное разности максимальной и фактической длительности блока ошибок.Кроме того, входной сигнал. поступает на первый (второй) блок 7 (8), в котором он задерживается на время максимальной длительности блока оши 55 бок, увеличенное на период следования кодовых слов, с выхода этого блока задержанный сигнал поступает как на первый информационный вход первого (второго) блока 11 (12), так и на вход третьего (четвертого) блока 9 (10).В третьем (четвертом) блоке 9 (10) задержанный сигнал дополнительно задерживается на время периода следования кодовых слов, С выхода третьего (четвертого) блока 9 (10) сигнал поступает на информационный вход первого (второго) блока 13 (14), на управляющий...
Предыдущий патент: Устройство для управления положением объекта
Следующий патент: Устройство для контроля цифровых сигналов
Случайный патент: Устройство для определения положения линии горизонта в полете