Распределенная система для программного управления с мажоритированием
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1727112
Авторы: Вахрушев, Литвиненко, Сперанский, Тимонькин, Ткаченко, Улитенко, Харченко

Текст
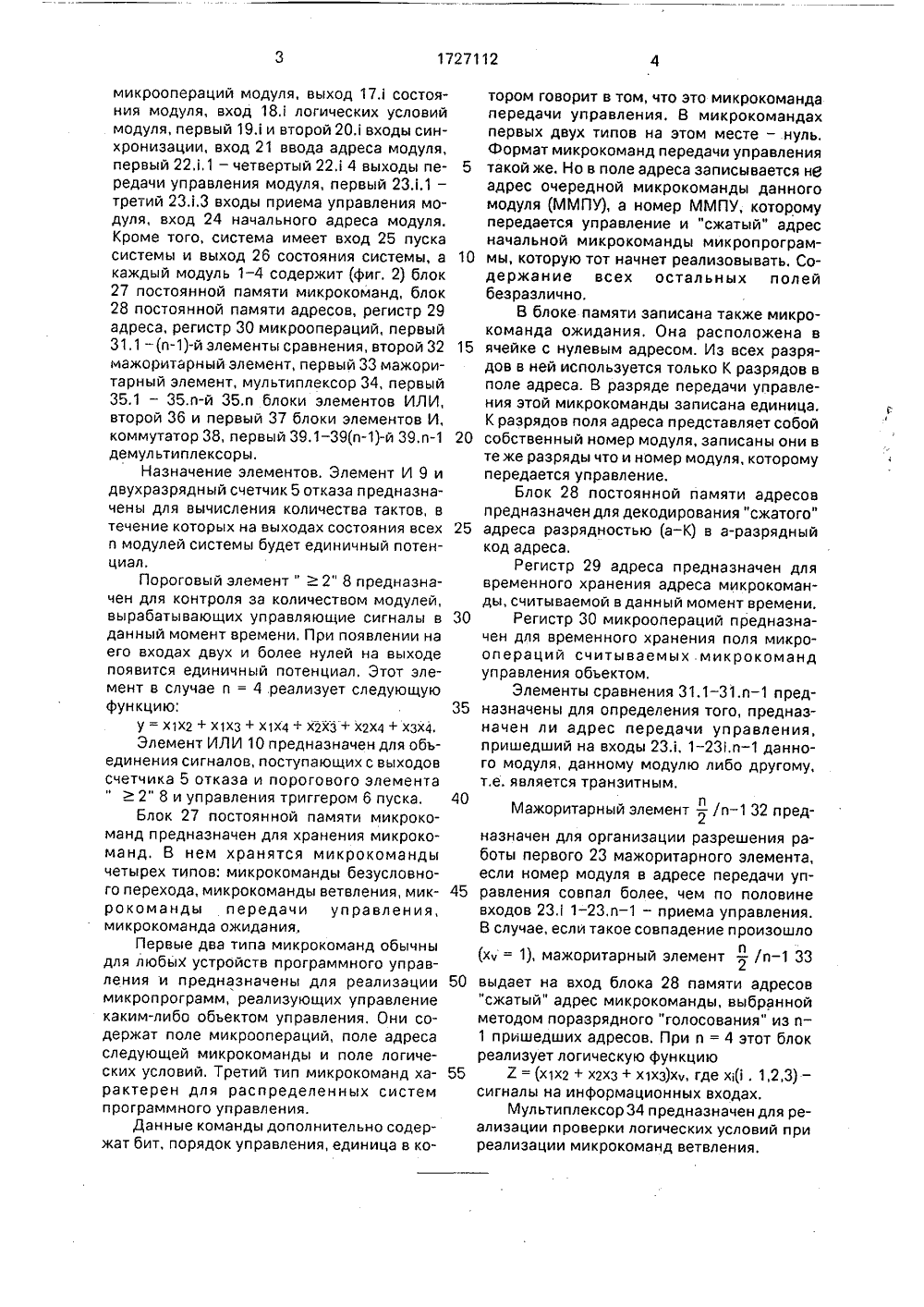
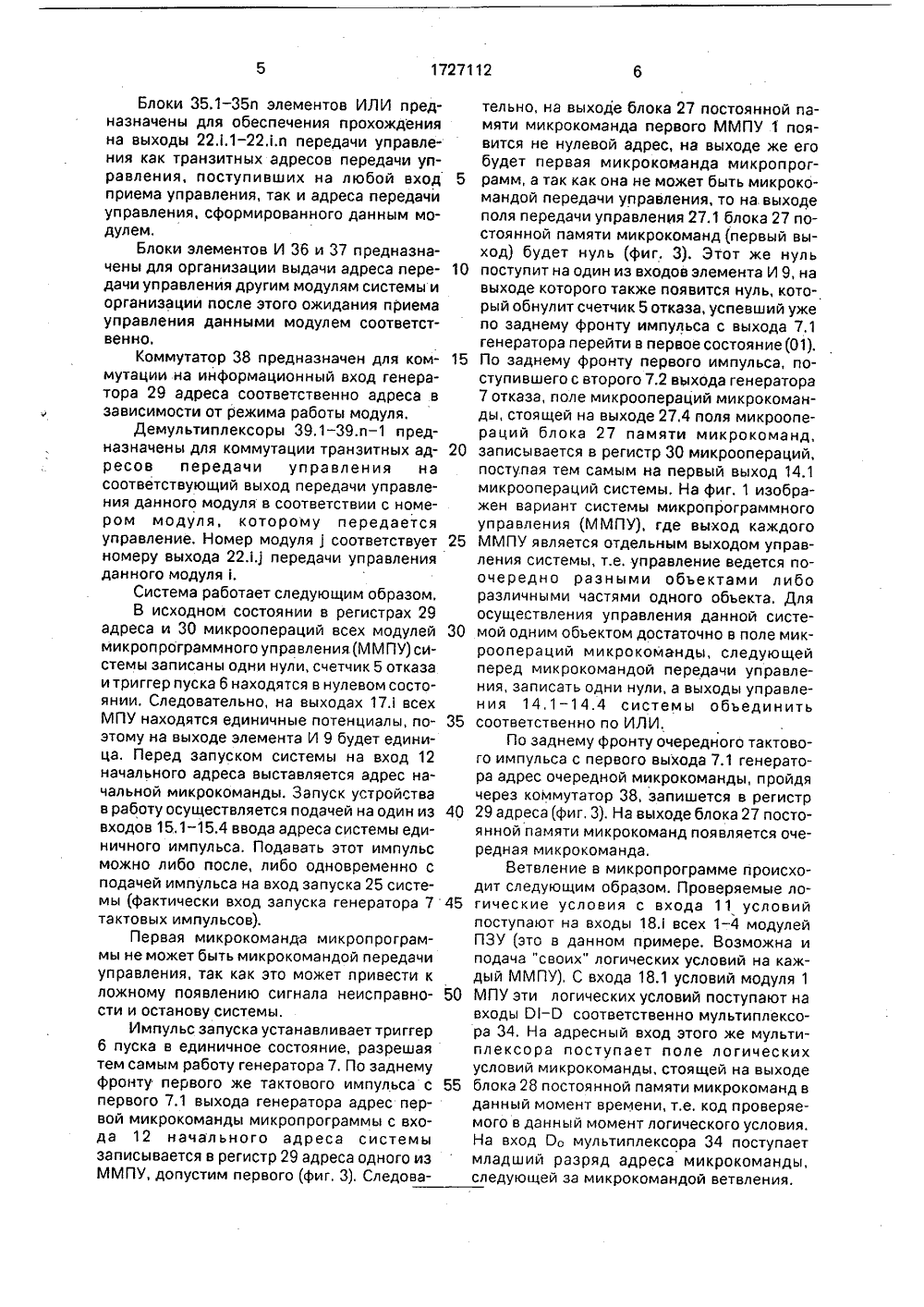
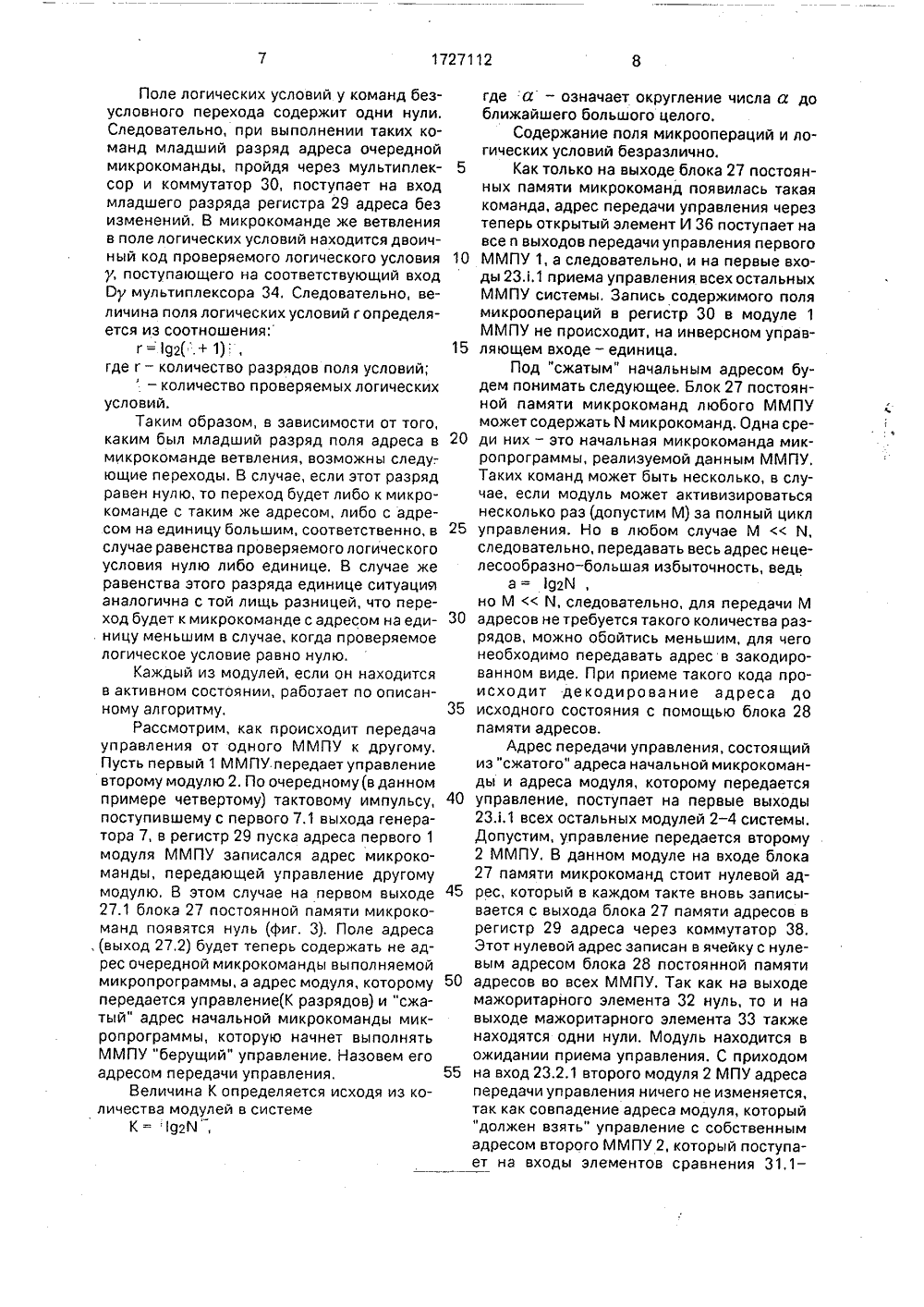
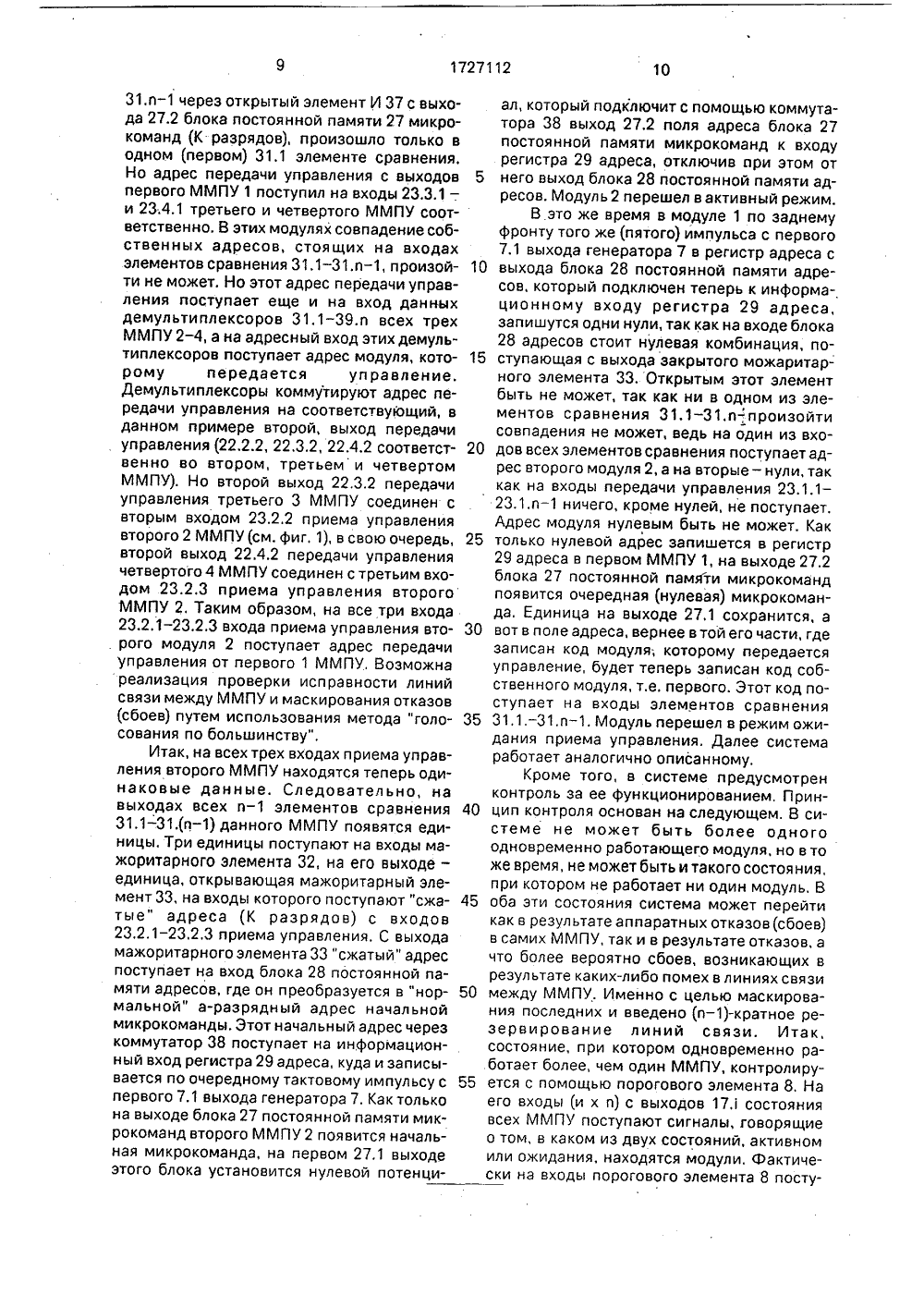
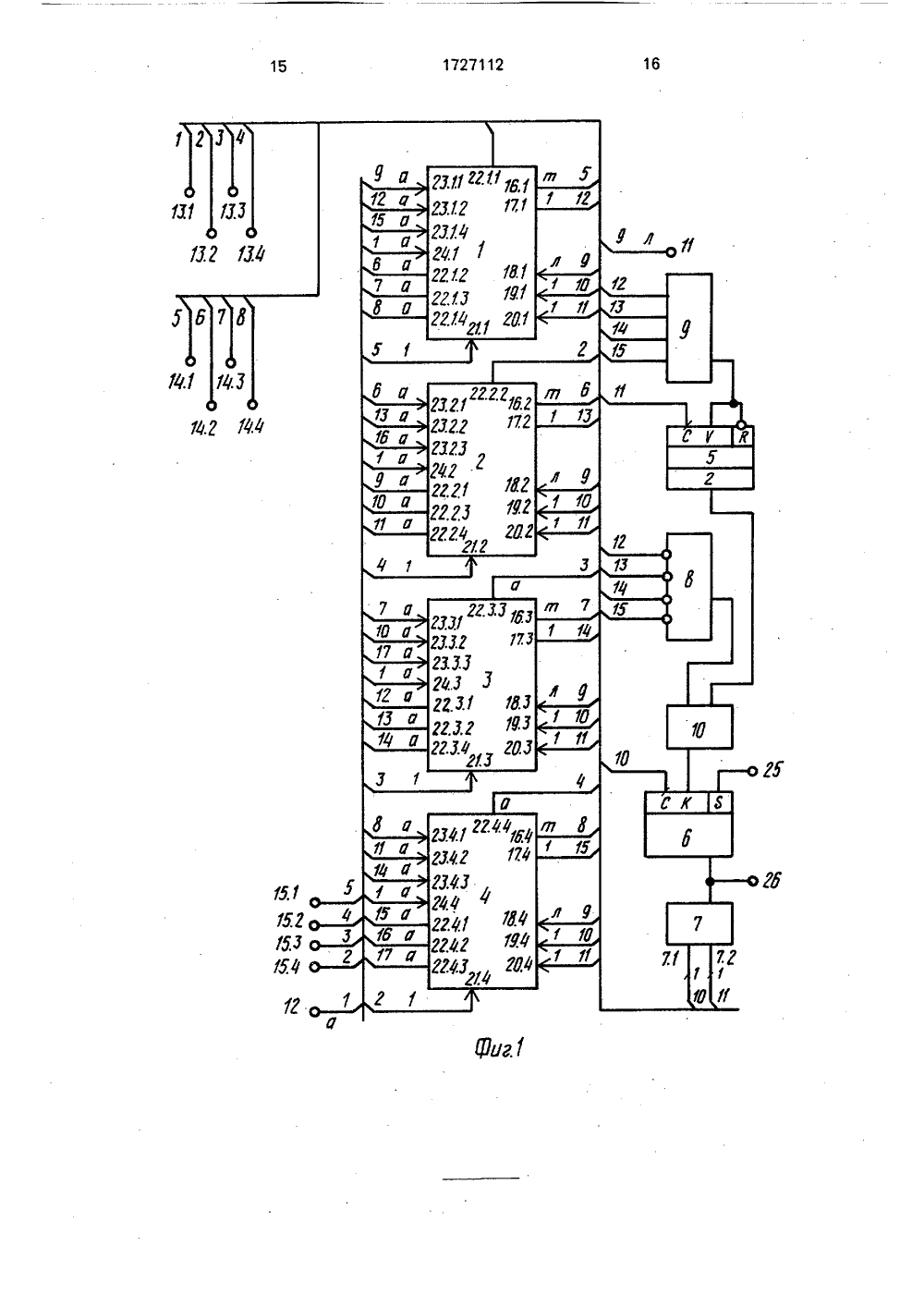
(19) 55 6 05 В 19/1 ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИПРИ ГКНТ СССР ОПИСАНИЕ ИЗОБРЕТЕНИ ВТОР СК ВИДЕТЕЛЬСТВУ правлеа рабо(21) 4808603/24(56) Авторское свидетельство СССРМ 1647519, кл. 6 05 В 19/18.Авторское свидетельство СССРМ 1427366, кл. 6 05 В 19/18, 6 06 Р 9/22,1988,(54) РАСПРЕДЕЛЕННАЯ СИСТЕМА ДЛЯПРОГРАММНОГО УПРАВЛЕНИЯ С МАЖОРИТИРОВАНИЕМ(57) Изобретение относится к автоматике ивычислительной технике и может быть исИзобретение относится к автоматике и вычислительной технике и может быть использовано при построении агрегатируемых отказоустойчивых систем для управления технологическими процессами, оборудованием и др.Цель изобретения - повышение надежности функционирования системы за счет организации многомаршрутной передачи управления между модулями и обеспечения возможности мажоритирования принимаемого адреса передачи управления.На фиг. 1 представлен пример выполнения функциональной схемы распределенной системы для программного управления, состоящей из четырех модулей; на фиг. 2 - функциональная схема модуля распредепользовано при построении агрегатируемых отказоустойчивых систем для управления технологическими процессами. Цель изобретения - повышение надежности функционирования системы. Поставленная цель достигается тем, что в систему, содержащую триггер пуска, генератор тактовых импульсов и и модулей микропрограммного управления, дополнительно введены пороговый элемент, счетчик отказа, элемент И и элемент ИЛИ. Введение новых элементов обеспечивает повышение достоверности передачи информации между модулями системы при передаче управления от одного модуля к другому за счет многомаршрутности, что дает возможность при приеме исправлять сбои или отказы, возникшие в оцессе функционирования системы. з,п.лы, 3 ил. ленной системы для программного у ния; на фиг. 3 - временная диаграмм ты системы.Распределенная система для программного управления с мажоритированием (фиг.1) содержит четыре модуля 1 - 4 микропрограммного управления, счетчик 5 отказа, триггер 6 пуска, генератор 7 тактовых импульсов, пороговый элемент "2" 8, элемент И 9, элемент ИЛИ 10, вход 11 логических условий системы, вход 12 начального адреса системы, первый 13.1 - четвертый 13,4 контрольные выходы системы, первый 14,1 - четвертый 14;4 выходы микро- операций системы, первый 15,1 - четвертый 15.4 входы введения адреса системы, каждый 1-й ( = 1.4) модуль содержит выход 16 л:21 1727112 2 Составитель О,ФомичеТехред М.Моргентал дактор Е.Копча рректор С.Лыжов Заказ 1278 Тираж ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям113035, Москва, Ж, Раушская наб., 4/5 КНТ СС нат "Патент", г. Уж л. Гагарина, 101 водственно-издательский коммикроопераций модуля, выход 17. состояния модуля, вход 18, логических условиймодуля, первый 19и второй 20. входы синхронизации, вход 21 ввода адреса модуля,первый 22.,1 - четвертый 224 выходы передачи управления модуля, первый 231 -третий 233 входы приема управления модуля, вход 24 начального адреса модуля.Кроме того, система имеет вход 25 пускасистемы и выход 26 состояния системы, а 10каждый модуль 1 - 4 содержит (фиг, 2) блок27 постоянной памяти микрокоманд, блок28 постоянной памяти адресов, регистр 29адреса, регистр 30 микроопераций, первый31,1 - (и)-й элементы сравнения, второй 32 15мажоритарный элемент, первый 33 мажоритарный элемент, мультиплексор 34, первый35.1 - 35.п-й 35.п блоки элементов ИЛИ,второй 36 и первый 37 блоки элементов И,коммутатор 38, первый 39.1 - 39(п)-й 39.п20демул ьтиплексоры.Назначение элементов. Элемент И 9 идвухразрядный счетчик 5 отказа предназначены для вычисления количества тактов, втечение которых на выходах состояния всех 25п модулей системы будет единичный потенциал.Пороговый элемент "2" 8 предназначен для контроля за количеством модулей,вырабатывающих управляющие сигналы в 30данный момент времени. При появлении наего входах двух и более нулей на выходепоявится единичный потенциал, Этот элемент в случае и = 4 реализует следующуюфункцию; 35У = х 1 х 2 + х 1 хз + х 1 х 4 + х 2 хЗ + х 2 х 4 + хзх 4.Элемент ИЛИ 10 предназначен для объединения сигналов, поступающих с выходовсчетчика 5 отказа и порогового элемента2" 8 и управления триггером 6 пуска. 40Блок 27 постоянной памяти микрокоманд предназначен для хранения микрокоманд. В нем хранятся микрокомандычетырех типов: микрокоманды безусловного перехода, микрокоманды ветвления, микрокоманды передачи управления,микрокоманда ожидания,Первые два типа микрокоманд обычныдля любых устройств программного управления и предназначены для реализации 50микропрограмм, реализующих управлениекаким-либо объектом управления. Они содержат поле микроопераций, поле адресаследующей микрокоманды и поле логических условий, Третий тип микрокоманд характерен для распределенных системпрограммного управления.Данные команды дополнительно содержат бит, порядок управления, единица в котором говорит в том, что это микрокоманда передачи управления, В микрокомандах первых двух типов на этом месте - нуль, Формат микрокоманд передачи управления такой же. Но в поле адреса записывается нВ адрес очередной микрокоманды данного модуля (ММПУ), а номер ММПУ, которому передается управление и "сжатый" адрес начальной микрокоманды микропрограммы, которую тот начнет реализовывать. Содержание всех остальных полей безразлично.В блоке памяти записана также микро- команда ожидания. Она расположена в ячейке с нулевым адресом, Из всех разрядов в ней используется только К разрядов в поле адреса. В разряде передачи управления этой микрокоманды записана единица. К разрядов поля адреса представляет собой собственный номер модуля, записаны они в те же разряды что и номер модуля, которому передается управление.Блок 28 постоянной памяти адресов предназначен для декодирования "сжатого" адреса разрядностью (а - К) в а-разрядный код адреса,Регистр 29 адреса предназначен для временного хранения адреса микрокоманды, считываемой в данный момент времени,Регистр 30 микроопераций предназначен для временного хранения поля микро- операций считываемых микрокоманд управления объектом,Элементы сравнения 31.1 - 31.п - 1 предназначены для определения того, предназначен ли адрес передачи управления, пришедший на входы 23.1, 1 - 23.и - 1 данного модуля, данному модулю либо другому, т,е, я вля ется тра нзитн ы м.Мажоритарный элемент - /и32 преди2назначен для организации разрешения работы первого 23 мажоритарного элемента, если номер модуля в адресе передачи управления совпал более, чем по половине входов 23. 1-23,п - 1 - приема управления. В случае, если такое совпадение произошло (х = 1), мажоритарный элемент - /п - 1 33и2 выдает на вход блока 28 памяти адресов "сжатый" адрес микрокоманды, выбранной методом поразрядного "голосования" из и - 1 пришедших адресов. При и = 4 этот блок реализует логическую функциюЛ = (Х 1 Х 2 + х 2 хз + х 1 хз)хч, где Х 1( . 1,2,3) - сигналы на информационных входах.Мультиплексор 34 предназначен для реализации проверки логических условий при реализации микрокоманд ветвления.Блоки 35.1 - 35 п элементов ИЛИ предназначены для обеспечения прохожденияна выходы 221-22 л.п передачи управления как транзитных адресов передачи управления, поступивших на любой вход 5приема управления, так и адреса передачиуправления, сформированного данным модулем.Блоки элементов И 36 и 37 предназначены для организации выдачи адреса передачи управления другим модулям системы иорганизации после этого ожидания приемауправления данными модулем соответственно.Коммутатор 38 предназначен для коммутации на информационный вход генератора 29 адреса соответственно адреса взависимости от режима работы модуля.Демультиплексоры 39,1 - 39 и - 1 предназначены для коммутации транзитных адресов передачи управления насоответствующий выход передачи управления данного модуля в соответствии с номером модуля, которому передаетсяуправление. Номер модуля ) соответствует 25номеру выхода 22.Ц передачи управленияданного модуля.Система работает следующим образом,В исходном состоянии в регистрах 29адреса и 30 микроопераций всех модулей 30микропрограммного управления (ММПУ) системы записаны одни нули, счетчик 5 отказаи триггер пуска 6 находятся в нулевом состоянии. Следовательно, на выходах 17 л всехМПУ находятся единичные потенциалы, поэтому на выходе элемента И 9 будет единица, Перед запуском системы на вход 12начального адреса выставляется адрес начальной микрокоманды. Запуск устройствав работу осуществляется подачей на один из 40входов 15,1 - 15,4 ввода адреса системы единичного импульса. Подавать этот импульсможно либо после, либо одновременно сподачей импульса на вход запуска 25 системы (фактически вход запуска генератора 7 45тактовых импульсов),Первая микрокоманда микропрограммы не может быть микрокомандой передачиуправления, так как это может привести кложному появлению сигнала неисправности и останову системы.Импульс запуска устанавливает триггер6 пуска в единичное состояние, разрешаятем самым работу генератора 7. По заднемуфронту первого же тактового импульса с 55первого 7.1 выхода генератора адрес первой микрокоманды микропрограммы с входа 12 начального адреса системызаписывается в регистр 29 адреса одного изММПУ, допустим первого (фиг, 3), Следовательно, на выходе блока 27 постоянной памяти микрокоманда первого ММПУ 1 появится не нулевой адрес, на выходе же его будет первая микрокоманда микропрограмм, а так как она не может быть микрокомандой передачи управления, то на выходе поля передачи управления 27.1 блока 27 постоянной памяти микрокоманд (первый выход) будет нуль (фиг. 3). Этот же нуль поступит на один из входов элемента И 9, на выходе которого также появится нуль, который обнулит счетчик 5 отказа, успевший уже по заднему фронту импульса с выхода 7.1 генератора перейти в первое состояние 01). По заднему фронту первого импульса, поступившего с второго 7.2 выхода генератора 7 отказа, поле микроопераций микрокоманды, стоящей на выходе 27,4 поля микроопераций блока 27 памяти микрокоманд, записывается в регистр 30 микроопераций, поступая тем самым на первый выход 14.1 микроопераций системы, На фиг. 1 изображен вариант системы микропрограммного управления (ММПУ), где выход каждого ММПУ является отдельным выходом управления системы, т.е. управление ведется поочередно разными объектами либо различными частями одного объекта. Для осуществления управления данной системой одним объектом достаточно в поле микроопераций микрокоманды, следующей перед микрокомандой передачи управления, записать одни нули, а выходы управления 14,1 - 14.4 системы объединить соответственно по ИЛИ,По заднему фронту очередного тактового импульса с первого выхода 7.1 генератора адрес очередной микрокоманды, пройдя через коммутатор 38, запишется в регистр 29 адреса (фиг, 3). На выходе блока 27 постоянной памяти микрокоманд появляется очередная микрокоманда.Ветвление в микропрограмме происходит следующим образом. Проверяемые логические условия с входа 11 условий поступают на входы 18, всех 1 - 4 модулей ПЗУ (это в данном примере. Возможна и подача "своих" логических условий на каждый ММПУ), С входа 18.1 условий модуля 1 МПУ эти логических условий поступают на входы 01-0 соответственно мультиплексора 34. На адресный вход этого же мультиплексора поступает поле логических условий микрокоманды, стоящей на выходе блока 28 постоянной памяти микрокоманд в данный момент времени, т.е. код проверяемого в данный момент логического условия. На вход О, мультиплексора 34 поступает младший разряд адреса микрокоманды, следующей за микрокомандой ветвления.5 10 20 Поле логических условий у команд безусловного перехода содержит одни нули.Следовательно, при выполнении таких команд младший разряд адреса очередноймикрокоманды, пройдя через мультиплексор и коммутатор 30, поступает на входмладшего разряда регистра 29 адреса безизменений. В микрокоманде же ветвленияв поле логических условий находится двоичный код проверяемого логического условияу, поступающего на соответствующий входОу мультиплексора 34. Следовательно, величина поля логических условий гопределяется из соотношения;г = 19 г( . + 1)где г - количество разрядов поля условий;- количество проверяемых логическихусловий.Таким образом, в зависимости от того,каким был младший разряд поля адреса вмикрокоманде ветвления, возможны следу-.ющие переходы. В случае, если этот разрядравен нулю, то переход будет либо к микрокоманде с таким же адресом, либо с адресом на единицу большим, соответственно, вслучае равенства проверяемого логическогоусловия нулю либо единице, В случае жеравенства этого разряда единице ситуацияаналогична с той лищь разницей, что переход будет к микрокоманде с адресом на еди. ницу меньшим в случае, когда проверяемоелогическое условие равно нулю.Каждый из модулей, если он находитсяв активном состоянии, работает по описанному алгоритму,Рассмотрим, как происходит передачауправления от одного ММПУ к другому.Пусть первый 1 ММПУ передает управлениевторому модулю 2. По очередному(в данномпримере четвертому) тактовому импульсу,поступившему с первого 7.1 выхода генератора 7, в регистр 29 пуска адреса первого 1модуля ММПУ записался адрес микрокоманды, передающей управление другомумодулю, В этом случае на первом выходе27.1 блока 27 постоянной памяти микрокоманд появятся нуль (фиг. 3). Поле адреса, (выход 27.2) будет теперь содержать не адрес очередной микрокоманды выполняемоймикропрограммы, а адрес модуля, которомупередается управление(К разрядов) и "сжатый" адрес начальной микрокоманды микропрограммы, которую начнет выполнятьММПУ "берущий" управление. Назовем егоадресом передачи управления.Величина К определяется исходя из количества модулей в системеК = 192 Й,25 30 35 40 45 50 55 где:а - означает округление числа а до ближайшего большого целого,Содержание поля микроопераций и логических условий безразлично.Как только на выходе блока 27 постоянных памяти микрокоманд появилась такая команда, адрес передачи управления через теперь открытый элемент И 36 поступает на все и выходов передачи управления первого ММПУ 1, а следовательно, и на первые входы 23.1.1 приема управления всех остальных ММПУ системы, Запись содержимого поля микроопераций в регистр 30 в модуле 1 ММПУ не происходит, на инверсном управляющемм входе - единица.Под "сжатым" начальным адресом будем понимать следующее. Блок 27 постоянной памяти микрокоманд любого ММПУ может содержать й микрокоманд. Одна среди них - это начальная микрокоманда микропрограммы, реализуемой данным ММПУ. Таких команд может быть несколько, в случае, если модуль может активизироваться несколько раз (допустим М) за полный цикл управления, Но в любом случае М й, следовательно, передавать весь адрес нецелесообразно-большая избыточность, ведьа= 9 Кно М И, следовательно, для передачи М адресов не требуется такого количества разрядов, можно обойтись меньшим, для чего необходимо передавать адрес в закодированном виде. При приеме такого кода происходит декодирование адреса до исходного состояния с помощью блока 28 памяти адресов.Адрес передачи управления, состоящий из "сжатого" адреса начальной микрокоманды и адреса модуля, которому передается управление, поступает на первые выходы 23 л.1 всех остальных модулей 2 - 4 системы. Допустим, управление передается второму 2 ММПУ, В данном модуле на входе блока 27 памяти микрокоманд стоит нулевой адрес, который в каждом такте вновь записывается с выхода блока 27 памяти адресов в регистр 29 адреса через коммутатор 38, Этот нулевой адрес записан в ячейку с нулевым адресом блока 28 постоянной памяти адресов во всех ММПУ. Так как на выходе мажоритарного элемента 32 нуль, то и на выходе мажоритарного элемента 33 также находятся одни нули. Модуль находится в ожидании приема управления. С приходом на вход 23.2.1 второго модуля 2 МПУ адреса передачи управления ничего не изменяется, так как совпадение адреса модуля, который "должен взять" управление с собственным адресом второго ММПУ 2, который поступает на входы элементов сравнения 31.1 -31.пчерез открытый элемент И 37 с выхо- ал, который подключит с помощью коммутада 27,2 блока постоянной памяти 27 микро- тора 38 выход 27.2 поля адреса блока 27 команд (К разрядов), произошло только в постоянной памяти микрокоманд к входу одном (первом) 31,1 элементе сравнения, регистра 29 адреса, отключив при этом от Но адрес передачи управления с выходов 5 него выход блока 28 постоянной памяти адпервого ММПУ 1 поступил на входы 23,3.1 - ресов. Модуль 2 перешел в активный режим.и 23.4,1 третьего и четвертого ММПУ соот- В.это же время в модуле 1 по заднему ветственно. В этих модулях совпадение соб- фронту того же (пятого) импульса с первого ственных адресов, стоящих на входах 7.1 выхода генератора 7 в регистр адреса с элементов сравнения 31.1 - 31.п, произой выхода блока 28 постоянной памяти адрети не может. Но этот адрес передачи управ- сов, который подключен теперь к информаления поступает еще и на вход данных ционному входу регистра 29 адреса, демультиплексоров 31.1 - 39.п всех трех запишутся одни нули, так как на входе блока ММПУ 2-4, а на адресный вход этихдемуль адресов стоит нулевая комбинация, потиплексоров поступает адрес модуля, кото ступающая с выхода закрытого можаритаррому передается управление, ного элемента 33. Открытым этот элемент Демультиплексоры коммутируют адрес пе- быть не может, так как ни в одном из элередачи управления на соответствующий, в ментов сравнения 31,1-31,п-,произойти данном примере второй, выход передачи совпадения не может, ведь на один из вхо, управления (22.2.2, 22.3,2, 22.4,2 соответст дов всех элементов сравнения поступает адвенно во втором, третьеми четвертом ресвторогомодуля 2,анавторые - нули,так ММПУ). Но второй выход 22,3.2 передачи как на входы передачи управления 23.1.1 - управления третьего 3 ММПУ соединен с 23.1.пничего, кроме нулей, не поступает.вторым входом 23,2,2 приема управления Адрес модуля нулевым быть не может. Как второго 2 ММПУ(см. фиг, 1), в свою очередь, 25 только нулевой адрес запишется в регистр второй выход 22.4,2 передачи управления 29 адреса в первом ММПУ 1, на выходе 27.2 четвертого 4 ММПУ соединен с третьим вхо- блока 27 постоянной памяти микрокоманд дом 23.2,3 приема управления второго появится очередная (нулевая) микрокоман- ММПУ 2. Таким образом, на все три входа да. Единица на выходе 27.1 сохранится, а 23.2. -3.2.1 - 23,2.3 входа приема управления вто вот в поле адреса, вернее в той его части, где , рого модуля 2 поступает адрес передачи записан код модуля; которому передается управления от первого 1 ММПУ. Возможна управление, будет теперь записан код собреализация проверки исправности линий ственного модуля, т.е. первого. Этот код посвязимеждуММПУимаскированияотказов ступает на входы элементов сравнения (сбоев) путем использования метода "голо 31.1. - 31,п - 1. Модуль перешел в режим ожисования по большинству". дания приема управления, Далее системаИтак, на всех трех входах приема управ- работает аналогично описанному.ления второго ММПУ находятся теперь оди- Кроме того, в системе предусмотрен наковые данные. Следовательно, на контроль за ее функционированием, Прин- выходах всех и - 1 элементов сравнения 40 цип контроля основан на следующем. В си.1-31,(п - 1) данного ММПУ появятся еди- стеме не может быть более одного ницы. Три единицы поступают на входы ма- одновременно работающего модуля, но в то жоритарного элемента 32, на его выходе - же время, не может быть и такого состояния, единица, открывающая мажоритарный эле- при котором не работает ни один модуль. В мент 33, на входы которого поступают "сжа оба эти состояния система может перейти тые" адреса (К разрядов) с входов как в результате аппаратных отказов(сбоев) 23.2.1 - 23,2,3 приема управления. С выхода в самих ММПУ, так и в результате отказов, а мажоритарногоэлементаЗЗ "сжатый" адрес что более вероятно сбоев, возникающих в поступает на вход блока 28 постоянной па- результате каких-либо помех в линиях связи мяти адресов, где он преобразуется в "нор между ММПУ. Именно с целью маскировамальной" а-разрядный адрес начальной ния последних и введено (п - 1)-кратное ремикрокоманды.Этотначальныйадресчерез зервирование линий связи. Итак, коммутатор 38 поступает на информацион- состояние, при котором одновременно раный вход регистра 29 адреса, куда и записы- ботает более, чем один ММПУ, контролирувается по очередному тактовому импульсу с 55 ется с помощью порогового элемента 8, На первого 7.1 выхода генератора 7. Кактолько его входы (и х и) с выходов 17. состояния на выходе блока 27 постоянной памяти мик- всех ММПУ поступают сигналы, говорящие рокоманд второго ММПУ 2 появится началь- о том, в каком из двух состояний, активном ная микрокоманда, на первом 27.1 выходе или ожидания, находятся модули. Фактичеэтого блока установится нулевой потенци- ски на входы порогового элемента 8 поступри котором "не работают" все п модулей (в 50 55 пают сигналы с выходов 27.1 блоков 27 постоянной памяти микрокоманд всех ММПУ. Если на инверсных входах порогового элемента 8 (см, фиг. 1) появятся хотя бы два нуля, на его выходе появится единица, которая через элемент ИЛИ 10 поступит на К- вход триггера 6 пуска. По заднему фронту первого же импульса, поступившего с первого выхода 7,1 генератора 7, триггер 6 пуска перейдет в нулевое состояние, остановив тем самым генератор 7 и систему в целом, выдавая на выход 26 состояния системы нулевой потенциал,Случай "не работы" ни одного из ММПУ системы более сложен, Каквидно из временной диаграммы (фиг. 3), даже при нормальном функционировании системы в случае передачи управления от модуля к модулю в течение одного такта существует такое состояние, при котором на выходах 27,1 блоков 27 постоянной памяти микрокоманд всех ММПУ будут единицы (между 4-м и 5-м импульсами). Такое состояние возникает, когда один из модулей передает управление, а второй его принимает, Но это состояние не может длиться более одного такта. Следовательно, задержка времени существования такого состояния более, чем на один такт, равносильна отказу системы. Это может произойти, например, в случае, когда между модулями, передающим управление и принимающим его, остались исправными менее двух линий связи либо сбои произошли во всех линиях и управление верно передано быть не может. Мгновенный останов системы и наличие контрольных незадействованных по связи выходов у каждого модуля дают возможность довольно полно и быстро выяснить причину останова.Выходпередачи управления модуляне задействован для связи с другими модулями (следовательно, менее подвержен сбоям и отказам), является -м контрольным выходом системы (14.1 - 14,4). Всего таких выходов у системы п, С их помощью можно организовать внешний по отношению к системе аппаратный диагностический контроль,Контроль за длительностью состояния,нашем примере и = 4) системы, осуществляется с помощью элемента И 9 и счетчика 5, Как только все модули системы вышли из активного состояния, на выходе элемента И 9 появляется единица, которая разрешает работу счетчика 5, находившегося в нулевом состоянии, Так как при нормальном функционировании системы единица может возникать на выходе элемента И 9 в промежутке между задними фронтами импульсов, посту 5 10 15 20 25 30 35 40 пающих с первого 7.1 выхода генератора 7 (см. фиг. 3), то синхронизацию счетчика 5 будем осуществлять импульсами, поступающими с второго выхода 7.2 счетчика 7. Счетчику 5 отказа "разрешается" считать до одного. Если он перешел из состояния 01 в состояние 00, то считается, что система работает нормально. Но так только счетчик "успел" достигать до двух (10), фиксируется отказ системы, Ведь длительность импульса на выходе элемента И 9 не может быть больше одного периода частоты генератора 7, следовательно, если счетчик 5 досчитал до двух, значит все ММПУ системы "не работают" более одного такта - а это отказ, о чем и говорит единица, поступающая с второго разряда счетчика 7 через элемент ИЛИ 10 на К-вход триггера 6 пуска, который обнуляется первым же импульсом с первого выхода 7.1 генератора 7.Формула изобретения 1. Распределенная система для программного управления с мажоритированием, содержащая триггер пуска, генератор тактовых импульсов и и модулей микропрограммного управления, причем вход пуска системы соединен с асинхронным установочным входом триггера пуска, прямой выход которого является выходом состояния системы и соединен с разрешающим входом генератора тактовых импульсов, .первый выход которого соединен с синхровходом триггера пуска и с первыми входами синхронизации всех модулей микропрограммного управления, второй выход генератора тактовых импульсов соединен с вторыми входами синхронизации всех модулей микропрограммного управления, выходы микроопераций которых являются соответствующими выходами микроопераций системы, входы логических условий модулей микропрограммного управления объединены и являются входами логических условий системы, о т л и ч а ю щ а я с я тем, что, с целью повышения надежности функционирования системы, в нее введены пороговый элемент, счетчик отказа, элемент И и элемент ИЛИ, выход которого соединен с синхровходом сброса триггера пуска, второй выход генератора тактовых импульсов соединен со счетным входом счетчика отказов, выход второго разряда которого соединен с первым входом элемента ИЛИ, выход состояния каждого модуля микропрограммного управления соединен с соответствующим входом порогового элемента и входом элемента И, выход которого соединен с входом разрешения и инверсным входом сброса счетчика отказа, выход порогового элемента соединен с вторым входом эле13 1727112 14 55 мента ИЛИ, входы начального адреса модулей микропрограммного управления объединены и являются группой входОвначального адреса системы, вход ввода адреса каждого модуля микропрограммного 5управления является соответствующим входом ввода адреса системы, -й выход передачи управления -го модулямикропрограммного управления ( = 1,п) является соответствующим контрольным выходом системы, )-й выход передачиуправления ) = 1, и, ): ) -го модуля микропрограммного управления ( = 1,п) соединенс К-м (К = 1, и) входом приема управления)-го модуля микропрограммного управления,2. Система по п. 1, отл и ч а ю ща я сятем, что модуль микропрограммного управления содержит блок постоянной памятимикрокоманд, блок постоянной памяти адресов, регистры адреса и микроопераций,группу элементов сравнения, первый и второй мажоритарные элементы, мультиплексор, группу блоков элементов ИЛИ, первуюи вторую группы элементов И, коммутатор и 25группу демультиплексоров, причем первыйи второй входы синхронизации модуля соединены соответственно с входами записирегистра адреса и регистра микроопераций, выходы которого являются выходами 30микроопераций модуля, )-е входы приемауправления модуля соединены с информационными входами /-го демультиплексора (= 1, п - 1), Я старших разрядов )-х входовприема управления модуля соединены с 35первой группой информационных входов /го элемента сравнения и адресными входами )-го демультиплексора, -й выходкоторого соединен с -м входом -го блокаэлементов ИЛИ группы, выход которого является -м выходом передачи управлениямодуля ( = 1, п), младшие разряды )-го входаприема управления модуля подключены к)-му входу первого мажоритарного элемента, выходы которого соединены с адресными входами блока постоянной памятиадресов, выходы которого соединены с второй группой информационных входов коммутатора, выходы которого соединены синформационными входами регистра адре са, выходы которого соединены с адресными входами блока постоянной памяти микрокоманд, информационный выход передачи управления которого соединен с первым инверсным, с вторым и третьим прямыми управляющими входами разрешения коммутатора, является выходом состояния модуля, соединен с первыми входами элементов И первой и второй групп и с инверсным входом управления регистра микроопераций, информационные выходы адреса блока постоянной памяти микрокоманд, кроме выхода первого разряда, соединены с первой группой информационных входов коммутатора, первый разряд информационных выходов адреса блока постоянной памяти микрокоманд соединен с первым разрядом информационных входов мультиплексора, остальные разряды информационных входов которого являются входами логических условий модуля, а выход мультиплексора соединен с первым разрядом первой группы информационных входов коммутатора, информационные выходы адреса блока постоянной памяти микрокоманд соединены с вторыми входами соответствующих элементов И второй группы, а Е старших разрядов - с вторыми входами соответствующих элементов И первой группы, выходы которых соединены с информационными входами вторых групп элементов сравнения группы, выходы которых соединены с соответствующими информационными входами второго .мажоритарного ,элемента, выход которого соединен с входом разрешения первого мажоритарного элемента, выходы логических условий блока постоянной памяти микрокоманд соединены с адресными входами мультиплексора, выходы микроопераций блока постоянной памяти микрокоманд соединены с информационными входами регистра микроопераций, выходы элементов И второй группы соединены с соответствующими входами группы блоков элементов ИЛИ группы, группа входов начального адреса модуля соединена с третьей группой информационных входов коммутатора, вход ввода адреса модуля является третьим управляющим входом разрешения коммутатора.
СмотретьЗаявка
4808603, 02.04.1990
ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "ХАРЬКОВСКИЙ ЗАВОД ЭЛЕКТРОАППАРАТУРЫ"
СПЕРАНСКИЙ БОРИС ОЛЕГОВИЧ, ХАРЧЕНКО ВЯЧЕСЛАВ СЕРГЕЕВИЧ, ЛИТВИНЕНКО ВАДИМ ГЕОРГИЕВИЧ, УЛИТЕНКО ВАЛЕНТИН ПАВЛОВИЧ, ТИМОНЬКИН ГРИГОРИЙ НИКОЛАЕВИЧ, ВАХРУШЕВ АЛЕКСЕЙ ЛЕОНИДОВИЧ, ТКАЧЕНКО СЕРГЕЙ НИКОЛАЕВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: мажоритированием, программного, распределенная
Опубликовано: 15.04.1992
Код ссылки
<a href="https://patents.su/10-1727112-raspredelennaya-sistema-dlya-programmnogo-upravleniya-s-mazhoritirovaniem.html" target="_blank" rel="follow" title="База патентов СССР">Распределенная система для программного управления с мажоритированием</a>
Система для передачи и приема дискретной информации
Номер патента: 903850
Опубликовано: 07.02.1982
Авторы: Белевич, Васильев, Ицкович, Келлер, Молотков, Парижский, Савуткин, Червяков, Шагулин, Шеховцов
МПК: G06F 3/04
Метки: дискретной, информации, передачи, приема
...от блока 17. При наличии сигнала цикло- фо вой синхронизации от блока 17 приходит разрешающий сигнал на элемент И 60 и в случае превышения порога на двух пороговых элементах 59 на выходе элемента И 60 формируется управляющий сигнал, который вместе с кодами сообщения поступает на блок 25 исправления одиночных ошибок защитного кода и подсчета числа парных ошибок.Блок 25 содержит регистры 61 и 62, на информационные входы которых поданы сиг налы элементов защитного кода соответственно первой и второй половины сообщения от блока 24, а на вход записи сигнал с элемента И 60 блока 24, подключенный также к элементу И 63, на второй вход которого поданы синхронизирующе импульсы от бло 55 ка 17, а выход подключен к входам сдвига регистров 61 и 62 и...
Устройство поиска адреса в системах памяти с магнитными барабанами или дисками

Номер патента: 318052
Опубликовано: 01.01.1971
Авторы: Бронштейн, Всесо, Гузь
МПК: G11B 20/10, G11B 5/09
Метки: адреса, барабанами, дисками, магнитными, памяти, поиска, системах
...Е - число массивов (соответственно, Е - количество оборотов, за которое просматриваются все адреса, а т - количество слов, просматриваемых за один оборот).Занесение двоичного кода адреса слова в регистр адреса происходит по любой из известных схем занесения числа (цепи занесения на схеме не показаны). После занесения кода адреса источник синхроимпульсов слов, построенный по любой из известных схем формирования серии синхроимпульсов слов после нулевой отметки магнитного барабана (ОМБ), выдает импульсы на шину синхроимпульсов 12. Эти импульсы поступают на импульсные входы формирователей 5 и 7, где опрашивают состояние регистра 1. Если этот регистр находится в нулевом состоянии (искомый адрес принадлежит нулевому массиву), схема 3...
Устройство формирования испытательных сигналов для цифровой телевизионной системы передач

Номер патента: 1290566
Опубликовано: 15.02.1987
МПК: H04N 17/00
Метки: испытательных, передач, сигналов, системы, телевизионной, формирования, цифровой
...меток времени 6 через элемент ЗАПРЕТ 26. На первый, управляющий вход элемента ЗАПРЕТ 26 в рассматриваемом режиме поступает лОл с третьего выхода СТС 4. В ЦАП 16 осуществляется цифроаналоговое преобразование сигнала, Аналоговый сигнал на выходе ЦАП 16 представляет собой на интервале активной части контрольных строк - испытательный сигнал, расположенный симметрично уровня фиксации испытательного сигнала, в остальных случаях - уровень фиксации телевизионного сигнала. Аналоговый сигнал с выхода ЦАП 16 поступает на второй вход дифференциального видеоусилителя 2, в котором и производится ввод испытательного сигнала в активную часть контрольных строк, причем с точным (с точностью до кванта и-го разряда) согласованием диапазона...
Система для передачи телеизмерительной информации

Номер патента: 1056246
Опубликовано: 23.11.1983
Авторы: Аллахвердов, Аносов, Исмаилов, Каллиников, Кремков, Лебедев, Лисенков, Опаренко, Рассохо, Федотов
МПК: G08C 19/28
Метки: информации, передачи, телеизмерительной
...регистр со схемамн ввода и вывочетвертым входом преобразователя приращения средней частоты в код, нерОднако эта система обладает дина-.мической погрешностью осреднения заи погрешностью ступенчатой аппроксимации, и результате которой сохвыходы всех счетных блоков подключены к третьему входу блока управлеразозанного сигнала на время текуния своего информационного канала ик третьему и четвертому входамщего преобразований. Кроме того,блока управления последнего информа-преобразования в ОЗУ записываетсяционного канала, выход цифровогоболчаое числоизбыточных данных,чтокомпаратора каждого информационногоканала, кроме последнего, соединенснижает информативность системы. с четвертым входом блока уцравления,Наиболее близким к изобретению 40...
Система для передачи телеизмерительной информации

Номер патента: 1084852
Опубликовано: 07.04.1984
Авторы: Аллахвердов, Исмаилов, Каллиников, Лебедев, Опаренко
МПК: G08C 19/28
Метки: информации, передачи, телеизмерительной
...блок-схем;а предлгжен 1 Ой системы; ца фиг. 2 -- функцио 1084852нальная схема блока управления адаптивного канала.Система (фиг. 1) содержит п информационных каналов 1 - 3, блок 4 элементов задержки, блок 5 памяти, согласующий блок 6, каждый информационный канал содержит первичные преобразователи 7 и 8, первые преобразователи 9 и 10 импульсов, арифметические блоки 11 и 12, блоки 13 и 14 управления.Последний информационный канал содержит второй преобразователь 15 импульсов и блок 16 переноса кода, остальные информационные каналы содержат второй блок 17 переноса кода, блок 18 сравнения, компаратор 19, блок 20 задания апертуры, первый блок 21 переноса кода, счетный блок 22, блок 23 переключения, формирователь 24 номера канала,...
Предыдущий патент: Устройство для программного управления с коррекцией траектории обработки
Следующий патент: Распределитель потока
Случайный патент: Способ обогащения природных фосфатов