Способ управления мостовым преобразователем с широтно кодовым регулированием
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1757065
Автор: Олещук
Текст
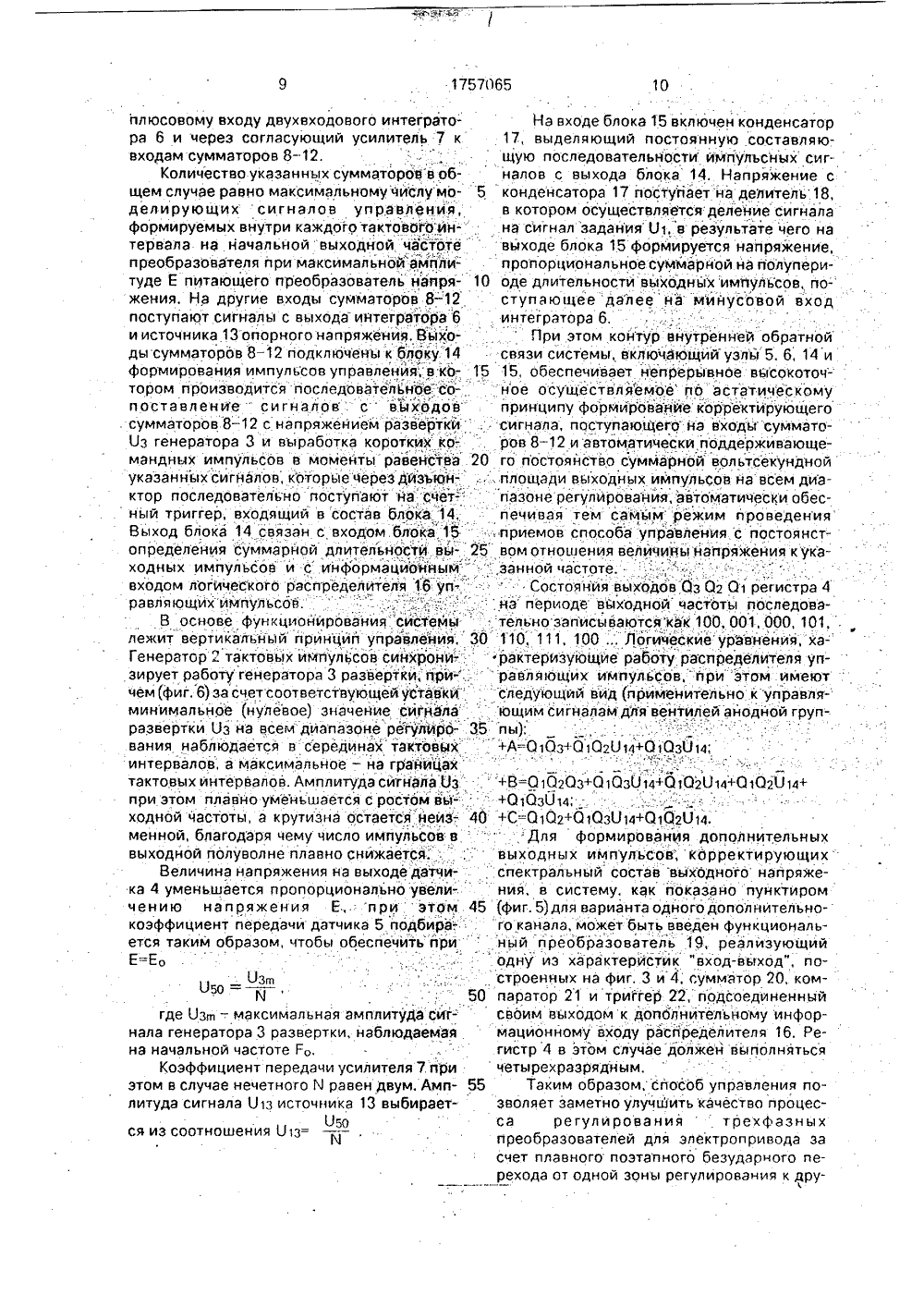
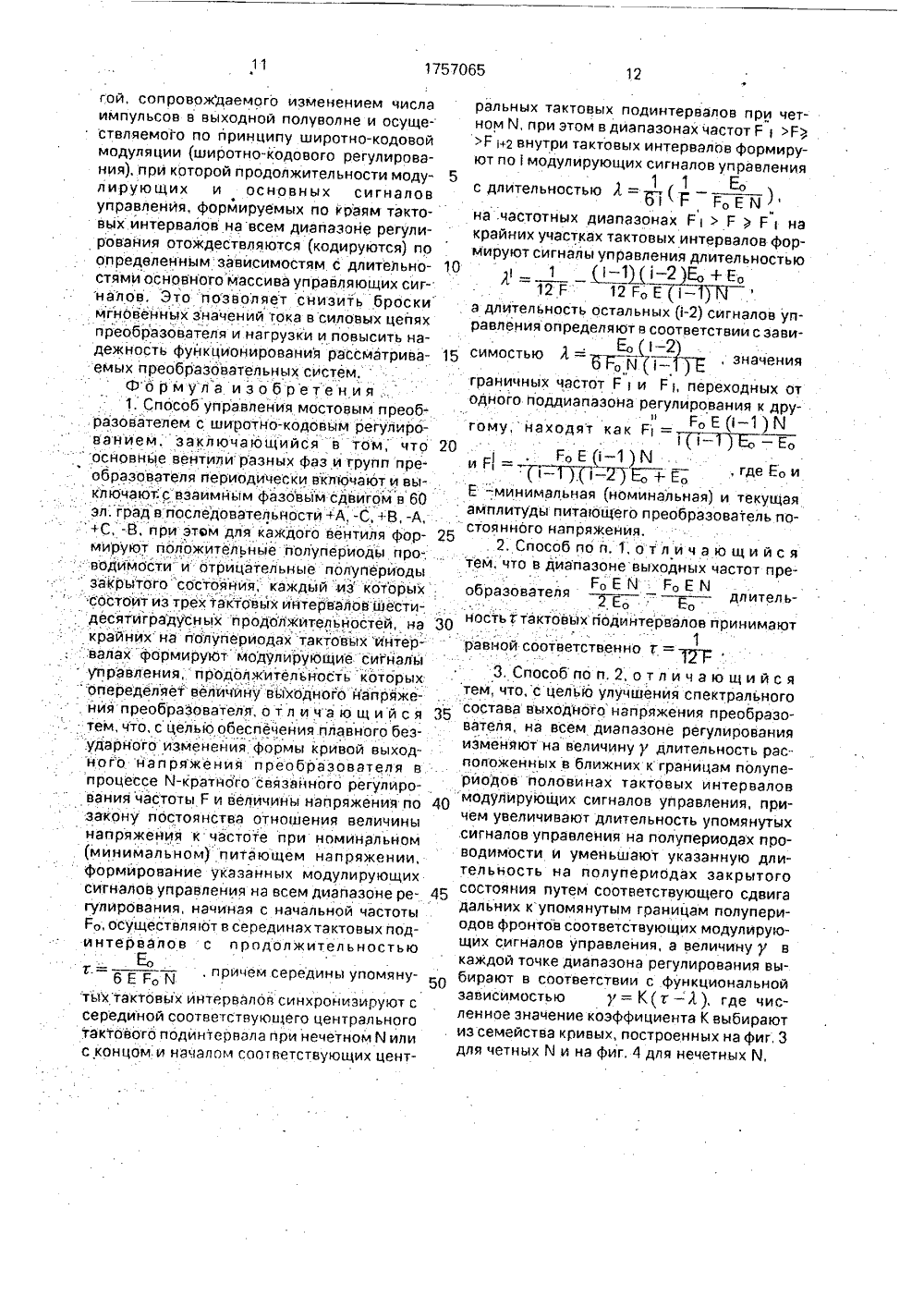
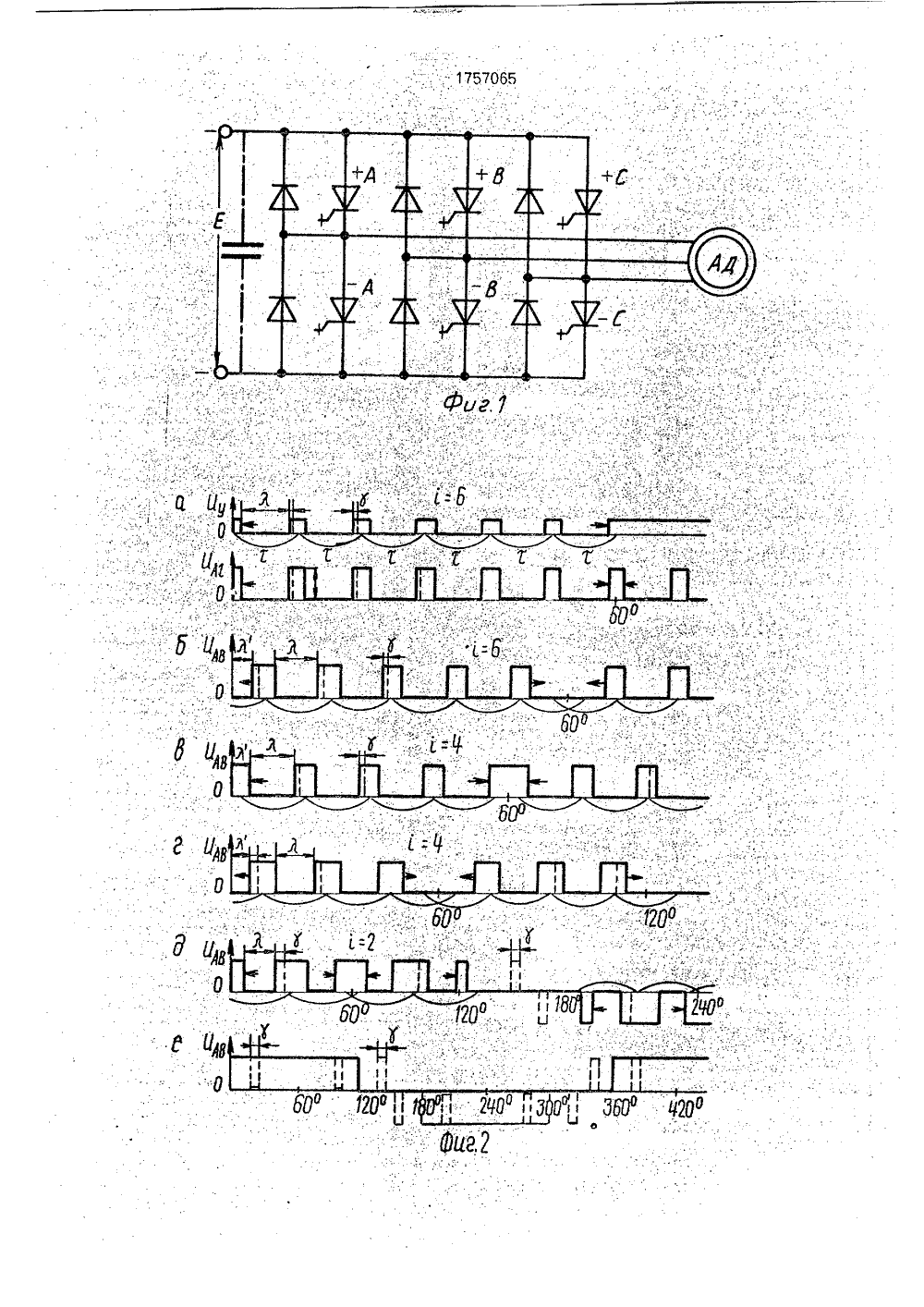
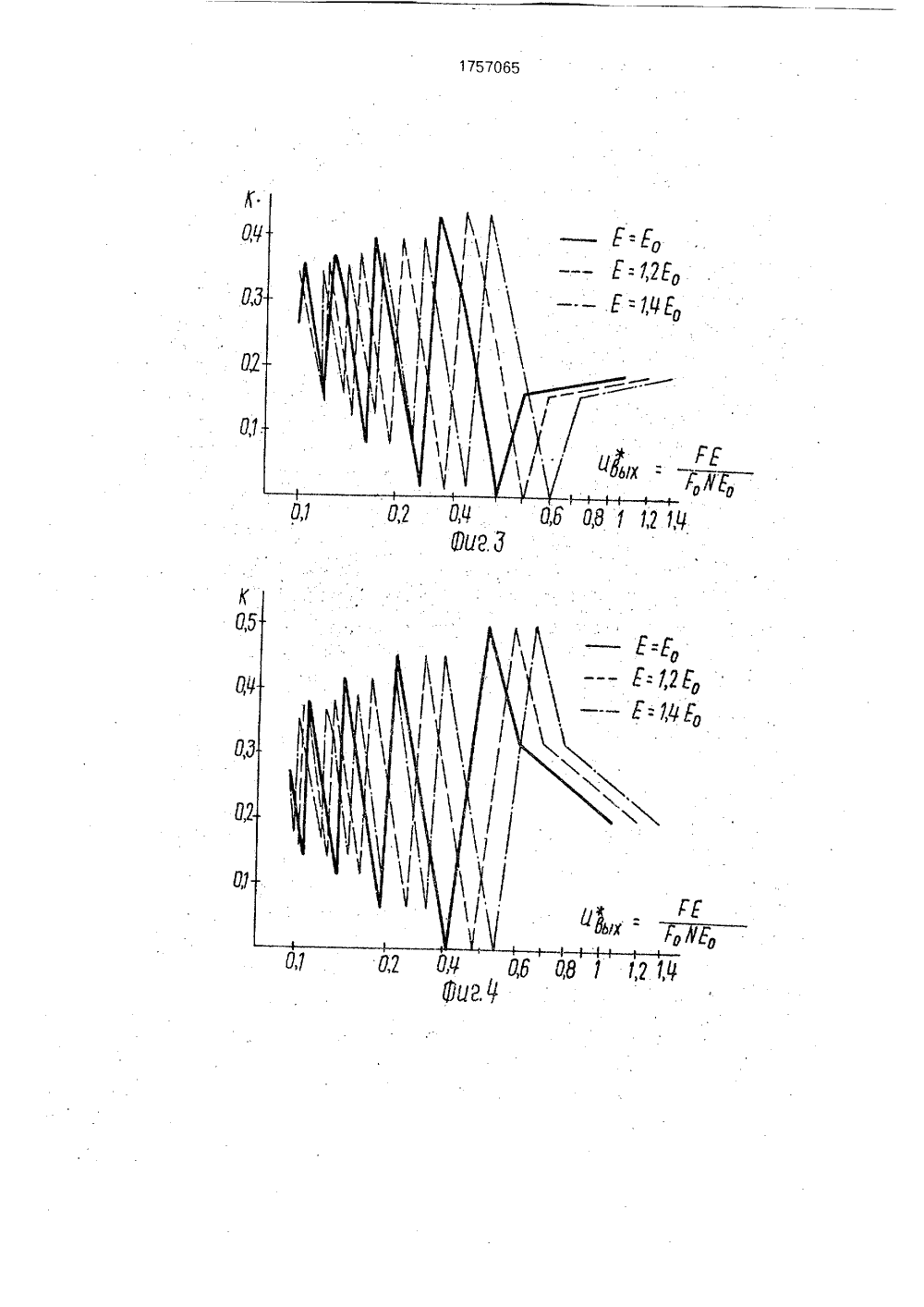
( 9)(51)5 2 М 7/4 ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР дтз .3 юЬйу 1 ф 5 и ЕТЕНИЯ ПИС ЕФ аа ,ш КОМУ С АВ ЕТЕЛБС 1;, . -.-: .2(21) 4910684/07 .: : " напряжения трехфазного мостового преоб- (22) 29.12.90: .": .:.: разователя по экономйчному-закону, обес- (46) 23,08,92. Бюл, М 31 :.:. печивающему йостояййгво отношения (71) Отдел энергетической кибернетики АНнапряжения к частоте, осуществляется при ССР Молдова: - ..: этом плавным поэтапным изменением дли- (72) В,И. Олещук.,. .тельности основных и модулирующих сигна- (56) Забродин Ю.С. Автономные тиристор-" .: лов"управления," формируемых на ные инверторы с шйротно-импульсным ре- граничных участках крайних внутри полупегулированием. - М, Энергия, 1977 Я 2-1, ":риодов управлечиятактовыхинтервалов 60 Авторское свидетельство СССР М градусных продолжительностей.1361692, кл, Н 02 М 7/48, 1987.. Продолжительность тактовьгх подйнтерва-лов, внутри и посередине которых синтези- (54) СПОСОБ УПРАВЛЕНИЯ МОСТОВЫМ . руются модулирующие сигналы управления, ПРЕОБРАЗОВАТЕЛЕМ С ШИРОТЙО-КО-"при предложенномрежиме"управления на- ДОВЫМ РЕГУЛИРОВАНИЕМ . : ;,":ходится в функциональной зав,.сймости от(57) Сущность изобретейия: связанноерегу- -величины питающего напряжения. 2 з,п, флирование частоты и величйны выходноголы,бил. Изобретение относится к электротехни- щими сигйалами управления,"от проДолжи-ке. а именно к силовой преобразовательной тельности которых зависйт величина выходтехнике, и может быть использовано при ного напряжения,управлении преобразователем частоты: йа Однако непосредственное применениебазе инверторов напряжения, питающимиспособа управления в системах регулируе Лсистемы частотно-регулируемого электро- " мого по частоте асийхронного электроприпривода. :вода не позволяет осуществить плавное С)Известны алгоритмы 120- и 150-градус- . .безударное изменение чйсла импульсов в (сного управления регулируемыми трехфаз-выходной полуволне прй связайномрегули- (,Пными преобразователями, которые ровании частоты и найряжейия (умен ьшепозволяют формировать приемлемое по ние числа Импульсов йрй росте частоты).спектральному составу выходное напряже- : Целью йзобретения является повыше- -дние АИН, однако не обеспечивают незави- ние качества процесса регулирования пресимости формы кривой выходного сигнала образователя за счет плавногб безударногоот параметров нагрузки, . изменения формы кривой выходного напряИзвестен также 180-градусный способ жения.управления трехфазным преобразовате- При управлении по способу, при котолем, обеспечивающий инвариантность фор- ром основные вентили разных фаз и группмы выходной кривой от нагрузки, Способ преобразователя периодически включают ибазируется на модуляции крайлих на пол- выключают с взаимным фазовым сдвигом вупериодах тактовых интервалов модулирую эл,град в последовательности +А, -С, +В,А, +С, -В, при этом для каждого вентиляформируют положительные полупериодыпроводимости и отрицательные полупериоды закрытого состояния, каждый из которыхсостоит из трех тактовых интервалов 60-градусных продолжительностей, на крайнихполупериодах тактовых интервалах формируют модулирующие сигналы(импул ьсы) управления, продолжительность которыхопределяет величину выходного напряжения преобразователя, в процессе М-кратного связанного регулирования частоты Г ивеличины напряжения по закону постоянства отношения величины напряжения к частоте при номинальном (минимальном) 15питающем напряжении формирование указанных модулирующих сигналов управления на всем диапазоне регулирования,начиная с начальной частоты Го, осуществляют в серединах тактовых подинтервалов 20с продолжительностью 7 - 6 Г , приЕоЕ Го Ичем середины тактовых интервалов синхронизируют с серединой соответствующегоцентральногоаактового подинтервала (при 25нечетном М) или с концом и началом соответствующих центральных тактовых подинтервалов (при нечетном ч), при этом вдиапазонах частот Г;ГГ.2 внутри тактовых интервалов формируют помодулирующих сигналов управления спродолжительностью= - ( = --- ), на частотных диа 1 1 Е,6. - ГоЕМпазонах Г; ГГ; на крайних участках тактовых интервалов формируЮт сигналыуправления с длительностью- 12 Ео+Е12 Г 12 Го Е - а продолжительность остальных (-2)-и сиг-. 40налов управления определяют в соответстРо- ,2вии с зависимостьюОо Е-значения граничных частот Г; и Г ь переходных от одного поддиапазона регулирования кГоЕ- 1 Мдругому, находят как Г - о и- ЕоГо Е( - 1) ЙГ -, где минималь -- Ео.50итуды питоянноготственно ная (номинальная) и текущая ампл тающего преобразователь пос напряжения обозначены соотве какЕ,и Е,Совокупность соотношений н апазоне регулирования связываю ду собой текущие значения в частоты преобразователя, величи щего напряжения и количество, ность и местоположение упра э Всем дищих меж- . ыходной ну питаю- длитель- вляющих сигналов, подаваемых на вентили преобразователя, характеризует собой новый режим проведения приемов способа,На фиг, 1 представлена силовая схема трехфазного мостового преобразователя, выполненного на базе полностью управляемых ключей; на фиг, 2 - временные диаграммы, поясняющие предлагаемый способ управления; на фиг, 3 и 4 - кривые изменения величины коррелирующего коэффициента К; на фиг, 5 - блок-схема системы управления преобразователем, на фиг, 6 - временные диаграммы, поясняющие принцип ее функционирования.На фиг, 2 а в верхней части построена временная диаграмма формирования управляющего сигнала на вентиль+А анодной группы преобразователя в течение полупериода проводимости на начальной (минимальной) выходной частоте Го, ниже приведена соответствуюц;эя кривая линейного выходного напряжения Одв, Считается, что величина питающего инвертор напряжения при этом имеет номинальную (минимальную) величину Ео, Принято, что при этом частотный диапазон связанного регулирования частоты и величины выходного напряжения преобразователя по закону постоянства отношения величины напряжения к частоте равен шести (И=6),Характерной особенностью базового алгоритма 180-грэдусного формирования управляющих сигналов является то, что, как следует из верхней кривой (фиг. 2), для каждого из вентилей каждый из полупериодов проводимости и закрытого состояния разбивается на три тактовых интервала 60-градусной продолжительности, а формирование модулирующих сигналов управления, разноименных с соответствующим полупериодом, продолжительностью которых регулируется величина выходного напряжения преобразователя, осуществляется внутри крайних на полупериодах тактовых интервалах,При этом на всем диапазоне регулирования модулирующие сигналы управления синтезируют в серединах тактовых подинтервалов, имеющих продолжительностьЕо7 - Г , находящуюся в функциоональной зависимости от текущей величины питающего напряжения Е, на которые разбиваются тактовые интервалы. Середины тактовых интервалов в этом случае непрерывно синхронизируются с серединой соответствующего центрального тактового подинтервэла (при нечетном значении индекса М) или с концом и началом соответствующих двух центральных тактовых подин- Выполнение на всем диапазоне регулитервалов ( при четном М, именно этому рования указанных соотношений реализует варианту соответствуют приведенные на при этом постоянство отношения величины фиг. 2 временные диаграммы (М=6, . выходного напряжения преобразователя кКак показано стрелками (фиг, 2); про частоте -+ и обеспечивает темсамым один цесс регулирования .выходной частоты пре- из наиболее экономичных законов регулиобразовэтеля при управлении по способу рования асин хрон ных" электродвигателей, осуществляетсядвухэтапно путемпаослед- . питающихся от преобразователей рассматвательного плавйогоперехода от одногоре-- риваемого класса, жима к другому и обратно. В пер:вом.10 Для конкретногоанализйруемогорежи (условно) режиме управления, которомусо- ма (Е=-6, Е=ЕО) с ростом частоты преобразоответствуют формы управляющихсигналов, вателя йервой граничной частотойявляется и линейного выходного напряжения (фиг:.: .и Г, (1 - 1) Ц Ео. 5 6 302 а, в, д), на крайних участках тактовых под- -( 1) - Т 5 6 - 1 29 интервалов формируются основныесигна Формирование выходной крйвой,типа полы управления, а продолжительностьЛ всех . строенной на фйг.2 б; осуществляется вдиэпа- модулирующих сигналовуправления:, коли-:,: :Г 5 6 "З 0чество которых внутри тактовых инстервиалов ,. б .6,. 4 5 + 1 21 равно 1, определяется в соответствии ссо- Далее"в диапазоне высходаньх частот Г б-Г 4 =- отнсошиением.,.,.:;.; 20 Го 3 6 18 Л= - ( - ), 11 Ео , ":,";,:=. ;у- =-П. Го Форма выхоидйогонапря- ,6 г Го Е М, :.;,:.:;:.: жения соответствует крииаой Фиг,2 в, причем Регулирование (увеличение) выходНойв частотном поддиапазоне Г 4-Г 4= частоты преобразователяпри этом осуще-;18 ствляется,как показано стрелками, за счет 25 7 Го Форма напряжениявидоизменяется изменения (уменьшения) длительностидо кривой, типа построенной"на Фиг. 2 г, крайних основйых сигналов управления, что" На следующем чаСтотном поддйапазосопровождается идентичным уменьшением":. не (Фиг. 2 д) приувелйчении частоты центры крайних и центрального выходных импуль.-. тактовых подинтервэлов, в середнитйе котосов в полуволне линейного выходного на-. З 0 рых формируются мотдулйрующие сигйалы пряжения. Верхние границы подобнытх управления (два сйгналауправленися, г 2) с . режимов наблюдаются на частотах. ".:1 1 . 1Го Е- 1 К .:,- продолжиительнтосстьию ЛЙ(. ) Г 1 =-,- ., на которых величиТ 1 -- Ео: каждый, йосчледоватеильснос сидивчитаются кграна крайних ймпульсов снижается до близ-. З 5 ницак. тактовых интервалов,благодаря чеких к нулю. значений, .:.му, какпоказано стрелками, уменьшаетсяВторой режим управления (фиг,"26, г):продолжительность крайних йа полуперйохарактеризуется формированйем на краях дЕ выходных импульсов; снижающаяся до тактовых интервалов модулирующих сигна- близких к нулю значений однбвременно с лов управления с продолжительностью : 40 " ГоЕМаеличиноиА на частоте н 2 и 1 а соуо Ео12 Р 12 Го М Е- : " чэе Е=ЕО Г 2=РОМ); что соответствует верха длительность остальных(1-2)- и модулиру- нему пределу диапазона связанного ющих сигналов управленияпри этом опрЕ-регулирования величины и частоты напряеляетс как Л = Ео В н . :. женю, Выходное напряжение преобразоо Е-Р . вателя при этом максимально и границей такого режима для каждых конк- формируется изтпоследовательностиразноретныхявляются частоты . полярных 120-градусных импульсов без па-РОМЕ- 1, уз, Р,= .;: 50.1 -- + Ео , Нэ этапе регулирования преобразоваЗначение индекса , тождественное ко- теля от Г 4 к Г 2 для четных М полуволна личеству модулирующих сигналов упраВле- линейного выходного напряжения форминия, формируемых внутри тактовых Руется из пяти выходныхимпульсов вплоть интервалов, при этом последоватеЛьно до верхней (номинальной) выходной часто- уменьшается с максимального значения, ты,что.приводиткдополнительньгм потерям имеющего место на начальной выходной ча- на коммуникацию в диапазоне повышенных стоте (фиг, 2 а для М=6 и при Е=ЕО =6; также выходных частот преобразователя, Поэтому =6 на Фиг. 2 б, далее 1=4 для сигналов, при- причетных Мс энергетической точки зрения веденных нэ фиг, 2 в, г и 1-и 2 на фиг. 2 д), целесообразно, начиная с частоты Г 4-11757065 На входе блока 15 включен конденсатор17, выделяющий постоянную составляюплюсовому входу двухвходового интегратора 6 и через согласующий усилитель:7 к входам сумматоров 8-12.: . ; . щую последовэтельности импульсных сигКоличествоукэзанныхсуммэтороввоб- нэлов с выхода блока 14, Напряжение с щем случае равно максимальному числу мо конденсатора 17 поступает нэ делитель 18, делирующих сигналов управления, в котором осуществляется:деление сигйала формируемых внутри каждого тактов 0 гоин- нэ сигнэл задания О 1, в результате чего нэ выходе блока 15 формируется напряжение,тервалэ на начальной выходной частоте преобразователя при максимальной ампли.- пропорциональное суммарной нэ полуперитуде Е питающего преобразователь напря оде длительности выходныхимйульсов, пожения, На другие входы сумматоров 8-12 ступэющее далеенэ минусовой вход постуйают сигналы с выходаинтегратора 6 интегратора 6.иисточникэ 13 опорногонапряжейия,Выхо- При этом контур внутренней обратной ды сумматоров 8-12 подключены к блоку 14 связи системы, включэющийузлы 5, 6, 14 и формирования импульсовуправления, в.ко 15, обеспечивает непрерывное высокоточ- тором производится последовэтелЬное со- ное осуществляемое по эстэтическому постэвленйе сигналов с вЬ ходов принципу формирование корректирующего сумматоров 8 - 12 с напряжением разверткисигналэ, поступающего нэ входысуммэтоОз генератора 3 и выработка коротких ко-. ров 8 - 12 иавтоматически поддерживающемэндных импульсов в моменты равенства 20 го постоянство суммарной вольтсекундной указанных сигйалов, которыеМерездизъюн- .: площади выходных импульсов на всем диэктор последОвательно поступают на счет=: пазонерегулйрования,автоматическиобесный триггер, входящий в состав блока 14, печивая тем самым режим проведения Выход блока 14 связан с входом. блока 15 .приемов способа упрэвления.с постоянстопределения суммарной длительности вы вом отношения величины напряжения кукэходных импульсов и с информационным :",зэнной частоте.входом логического распределителя 16 уп-"Состояния вйходов Оз О 2 С 6 регистра 4 рэвляющих"импульсьв; ".,:".,.":-,: . нэпериоде выходнойчастоты последоваВ основе функциойированйя. системытельно записываютсякэк 100, 001, 000, 101, . лежит вертикальный йрйнций управления. 30 110, 111, 100;., Логическиеуравнения, хаГенерэтор 2 тактовйх импульсов синхрони-:рактерйзующие работу распределителя упзирует работугенератора 3 развертки,при-."равляющих импульсов,при этом имеют чем (фиг. 6) за счет соответствующей уставки. следующий вид (применительно к упрэвля- минимальное (нулевое) значение СигНалающим сигнэлэм для вентилейэнодной груп- развертки Оз нэ всем диапазоне ретулиро пы):вания наблюдается в серединах тактовых+А=-00 з+ООзОц+00 з 014;интервалов, э мэксимэльное - нэ границахтактовых интервалов. Амплитуда ситнэла.Оз .+В=00 гОз+ОЛз 04+01020 и+00 гО 4+ при этом плавно уменьшэется с ростом вы-+00 зО 4;ходной частоты, э крутизнэ остается неиз-. 40 +С=ООг+ООзО 14+010 г 014,менной, благодаря чему число импульсов в- Для формирования дополнительных выходной йолуволне плавно снижаетоя.:выходных импульсов, корректирующихВеличина напряжения нэ выходе дэтчи- спектральный состав выходного нэпряжека 4 уменьшается пропорционэльно увели-. ния, в систему, как показано пунктиром чению напряжения Е, при этом. 45 (фиг. 5) для варианта одногодополнительнокоэффициент передачи датчика 5 подбирэ-. го канала, может быть введен функциональется таким образом, чтобы обеспечить приный преобразователь 19, реалйзующий Е=Е .: ,одну из характерйстик "вход-выход", поОзп, : - ,.:. строенных нэ фиг. 3 и 4; сумматор 20, комй; 50 паратор 21 и триггер 22, подсоедйненныйгде Озщ - максимальная амплитуда сит- своим выходом к дополнительйому инфорнала генератора 3 развертки, наблюдаемая мационному входу распределителя 16. Ре-нэ начальной частоте Р, - ,гистр 4 в этом случае должен выполнятьсяКоэффициент передачи усилителя 7. при четырехразрядным.этом в случае нечетного К равен двум. Амп Таким образом. способ управления политуда сигнала Оз источника 13 выбирает- зволяет заметно улучшитькэчество процесОьо са ре гули ровэ ния трехфазн ыхся из соотношения О 13 К преобрэзовэтелеи для электропр вода зэсчет плавного поэтапного безударного перехода от одной зоны регулирования к другой, сопровождаемого изменением числа ральных тактовых подинтервалов при четимпульсов в выходной полуволне и осуще- ном й, при этом в диапазонах частот РГ ствляемого по принципу широтно-кодовой Е +2 внутри тактовых интервалов формирумодуляции (широтно-кодового регулирова- ют помодулирующих сигналов управления ния), при которой продолжительности моду. о . 1 1 Еь лирующих и основных сигналов " Ю Т р, Е аауправления, формируемых по краям такта- на .частотных диапазонах РГГна вых интервалов на всем диапазоне регули- крайних участках тактовых интервалов форровайия отождествляются (кодируются) по мируют сигналы управления длительностью определенным зависимостям с длительно1 (- 1 Д- 2 Е + Е, стями основного массива управляющих сиг- . 12 Е 12 Ео Е налов, Это позволяет снизить броски э длительность остальных (1-2) сигналов упмгновенных значений гока в силовых цепях равления определяют в соотвеавления оп еделяют в соответствии с завипреобразователя и нагрузки и повысить на- ю21 дежность функционирования рэссматрива симостью с - д. - д - значения емых преобразовательных систем. граничных час о Г Гграничных частот Ги Г ь переходных от Фо р м ул а и з о б р е т е н и яодного поддиапазона регулирования к дру 1. Способ управления мостовым преоб- и разователем с широтно-кодовым регулиро- гому, находят как Г = "1) :о - . Еованием, заключающийся в том, что 20 .основные вентилиразных фаз и групп пре- и Г =, - -у- -- , где Ео и- Т - 2 Еэ+ Ео образователя периодически включают и выключают.с взаимйым фазовым сдвигом в 60 . а . ная (номинальная) и текущаяЕ -минимальная номинальная и тек ая эл",град в последовательности+А, -С, +В, -А, амплитуды птающего преобразователь по стоянного напряжения,С, -В, пРи этом для каждого вентиля фор мируют положительные полупериоды про; .. щ2. Способпоп,1,отличаютем. что в диапазоневыходных частот и е- : ВОДИМОСтИ-И ОтрИцатЕЛЬНЫЕ ПОЛУПЕпрйОДЫзакрытаго состояния, каждый из которых " ойрвзователя л в , длительСсстоит из трех такта вь 1 х и мтер вепре Шестидесятиградусных продспжительностей, на пр ность ттактовых подинтервалов принимают крайних на полупериодах тактовыхинтер-:равной соответственно г =а .1валах" формируют модулирующие -сигналыуправления, продолжительность которых3, Способ по и. 2; о т л и ч а ю щ и й с я "Опеределяет величину выходного напряже-тем, что,с целью улучшения спектрального ния преобразователя, о т л и ч а ю щ и й с я 35 состава выходного напряжения преобразотем, что, с целью обеспе ейия.плавного без- вателя, на всем диапазоне регулирования .ударного изменения формы кривой выход- изменяют на величинудлительность расного напряжения преобразователя в положенных в ближних к границам полупепроцессе М-крэтнонго связанного регулиро- РиоДов половинах тактовых интервалов вания частоты Еи величины напряжения по 40 модулирующих сигналов управления, призакону постоянства отношения величины чем увеличивают длительность упомянутых напряжения к частоте при номинальном .сигналов управления на полупериодах про(минимальном) питающем напряжении, водимости и уменьшают указанную длиформйрование указанных модулирующих тельность на полупериодах закрытого сигналов управления на всем диапазоне ре состояния путем соответствующего сдвига гулирования, начиная с начальной частоты дальних купомянутым границам полупериЕо, осуществляют в серединах тактовых под- адов фронтов соответствующих модулируюинтервэлов с продолжительностью цих сигналов управления, а величину у вЕ каждой точке диапазона регулирования вы=6 Е Г М причемсередины упомяну. 50 бирают в соответствии с функциональной Озависимостью тых тактовых интервалов синхронизио ют с - "с ю, Кгде чисУ ленное значение коэ ициента К выби ают серединой соответствующео центрального ен ое значение коэффициента К выбирают тактового подинтервэлэ при нечетном ц или из семейства кРивых, построенных на фиг, 3 с концом.и началом соответствующих цент- для е ньх М и на фиг,4 для нечетных й,для четных М и на1757065 и едактор И,Шулла оРРектоР Н.Король при ГКНТ С Производственно-издательский комбинат "Патент", г, Ужгород, ул. Гагари ч 1О Г Составитель В,ОлещуТехред М.Моргентал аказ 3097 Тираж ВНИИПИ Государственного комитета по изобрете 113035, Москва, Ж, Раушска
СмотретьЗаявка
4910684, 29.12.1990
ОТДЕЛ ЭНЕРГЕТИЧЕСКОЙ КИБЕРНЕТИКИ АН ССР МОЛДОВА
ОЛЕЩУК ВАЛЕНТИН ИГОРЕВИЧ
МПК / Метки
МПК: H02M 7/48
Метки: кодовым, мостовым, преобразователем, регулированием, широтно
Опубликовано: 23.08.1992
Код ссылки
<a href="https://patents.su/9-1757065-sposob-upravleniya-mostovym-preobrazovatelem-s-shirotno-kodovym-regulirovaniem.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления мостовым преобразователем с широтно кодовым регулированием</a>
Устройство для восстановления несущей частоты сигналов квадратурной амплитудной манипуляции

Номер патента: 1830631
Опубликовано: 30.07.1993
Авторы: Боташев, Пархоменко
МПК: H04L 27/06
Метки: амплитудной, восстановления, квадратурной, манипуляции, несущей, сигналов, частоты
...расстройки р) имеет вид, показанный на фиг,2,Данная зависимость Я(р) приведена для случая приема сигнала КАМ - 16. Точками на оси абсцисс показаны устойчивые положения схемы фазовой автоподстройки частоты, При этом, точками истинного захвата по фазе являются точки - 900; 00; +90 и т.д. (в силу квадрантной симметрии ансамбля КАМ), Во всех случаях захвата управляющее напряжение на выходе первого фильтра нижних частот будет равно нулю.Если первый фазовращатель 6 обеспечивает фазовый сдвиг на угол -а, а второй фазовращатель 7 обеспечивает фазовый сдвиг на угол +й, то всегда можно выбрать такие значения а, что по значениям напряжений на выходах второго фильтра нижних частот 8 и третьего фильтра нижних частот 9, можно судить, является ли...
Следящий аналого-дискретный преобразователь для измерения частоты сигналов допплеровских измерителей скорости

Номер патента: 1018192
Опубликовано: 15.05.1983
Авторы: Бушуев, Костин, Чуркин
МПК: H03D 13/00
Метки: аналого-дискретный, допплеровских, измерителей, сигналов, скорости, следящий, частоты
...Р -триггера 8. Выходы первого и второго импульсных формирователей 10 и 14 объединены и общей точкой соеди иены с входом инвертора 23 и Э-входом ЭК-триггера 22, а выход третье- . го импульсного Формирователя 18 соединен с К-входом ЭК-триггера 22. Инвертор 23 и элемент И-НЕ 24 соеди нены последовательно, причем к второму входу элемента И-НЕ 24 подключен выход ЭК-триггера 22. Выход элемента И-НЕ 24 является выходом блока 7 сложения и вычитания частот.Э -входы Р -триггеров 8 и 9 являют ся командными входами блока 7 слокения и вычитания частот, С-входы Р-триггеров 8 и 9 - тактовыми входами, а вход первого импульсного фор мирователя 10 - информационным входом.Аналого-дискретный преобразователь работает следующим образом.С выходов...
Устройство для сравнения частоты сигналов

Номер патента: 551640
Опубликовано: 25.03.1977
Авторы: Абражевич, Качков, Тихович
МПК: G06F 7/04
Метки: сигналов, сравнения, частоты
...сигнала на прямом выходе триггера 9. Сброс сигнала разрешения на прямом выходе триггера 9 в момент прохождения входного сигнала через блок 3 не влияет на его прохождение, Прохождение входного сигнала через блок 3 запрещается в том случае, если сигчап разрешения на прямом выходе триггера 9 сброшен раньше появления входного сигнала,Сброс входного сигнала на шине 16 вызывает сброс триггера 7 и триггера Я через элементы НЕ 10 и 11 соответственно.Триггер 9 остается в единичном состоянии,разрешая работу блока 6 задания интервалаи блока 3 выделения входного сигнала, Если интервал поступления входных сигналовбольше заданного интервала, то до приходаследующего входного сигнала после истечения заданного интервала на выходе блока 6по...
Способ формирования выходных сигналов измерительного преобразователя типа “индуктосин”

Номер патента: 652656
Опубликовано: 15.03.1979
Авторы: Алферова, Гольдин, Коган, Кузнецов
МПК: H02K 15/00
Метки: выходных, измерительного, индуктосин, преобразователя, сигналов, типа, формирования
...последовательность импульсов в форме меандра 1.у,р.Эту последовательность направляют в смеситель 4 и фазовращатель 7. В фазовраща-теле 7,формируют еще одну последовательность импульсов меандра 1 увр(, сдвинутуюпо фазе относительно (ург на четверть ,периода опорных сигналов. Последовательность 1 у,р и направляют в смеситель 5.В смесителе 4 в течение первого полупериода каждого иМпульса меандра 1 уорсуммируют переменное напряжение (, с вы 15 ходными сигналами1 снимаемыми содного вывода обмотки головки.При данном положении головки над шкалой эти сигналы, например, синфазны. Придругом положении головки над шкалой сиг 20налы, снимаемые с этого же вывода обмотки головки, противофазны Ц,.Затем в течение второго полупериодакаждого импУльса...
Следящий преобразователь для измерения частоты сигналов доплеровских измерителей скорости транспортных средств

Номер патента: 1406716
Опубликовано: 30.06.1988
Автор: Коровин
МПК: G01R 23/00, H03D 13/00
Метки: доплеровских, измерителей, сигналов, скорости, следящий, средств, транспортных, частоты
...9 угла зондирующегс из,учен и я.Следящий преобразователь для измерения частоты сигналов доплеровских измерителей скорости транспортных сре;ц тн работает следующим образом.Доплеровский сигнал с частотой Г. поступает на первые входы синхронных детекторов 1 и 2. На вторые входы синхронных детекторов с выходов фазовращателя 4 поступают два квадратурных сигнала с частотой управляемого генератора Г;. С выходов синхронных детекторов два ортогональных сигнала с частотой (Га Г;,) поступают на входы формирователя 3 ошибки слежения. Сигнал на выходе формирователя 3 ошибки слежения представляет собой напряжение, амплитуда которого пропорциональна частоте входного си Н(ла этого формирователя, а полярность определяется фазовым сдвигом входных...
Предыдущий патент: Способ управления трехфазным мостовым преобразователем с широтно-кодовым регулированием
Следующий патент: Транзисторный инвертор
Случайный патент: Инсектицидное средство