Способ управления трехфазным мостовым преобразователем с широтно-кодовым регулированием
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1757064
Автор: Олещук
Текст
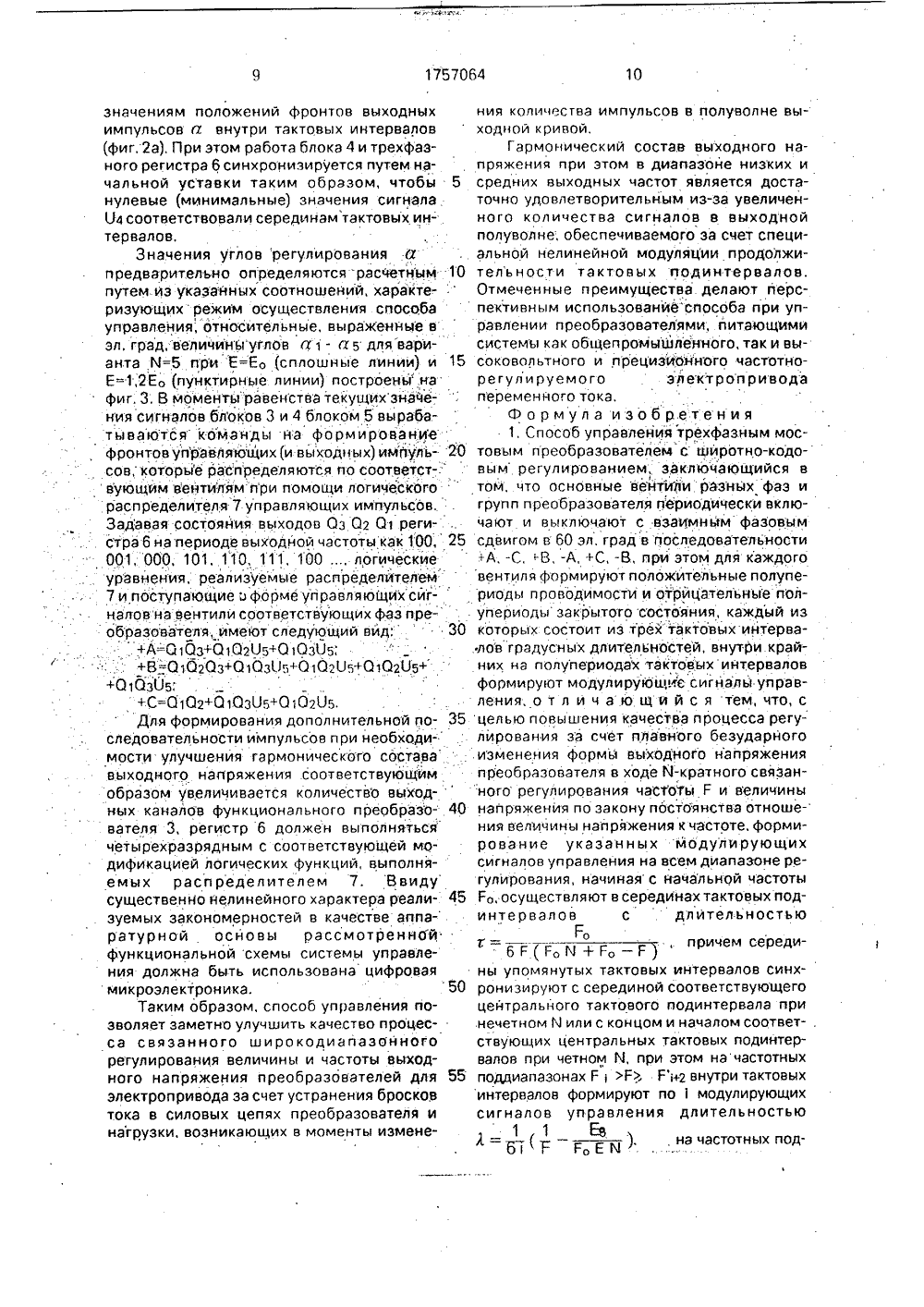
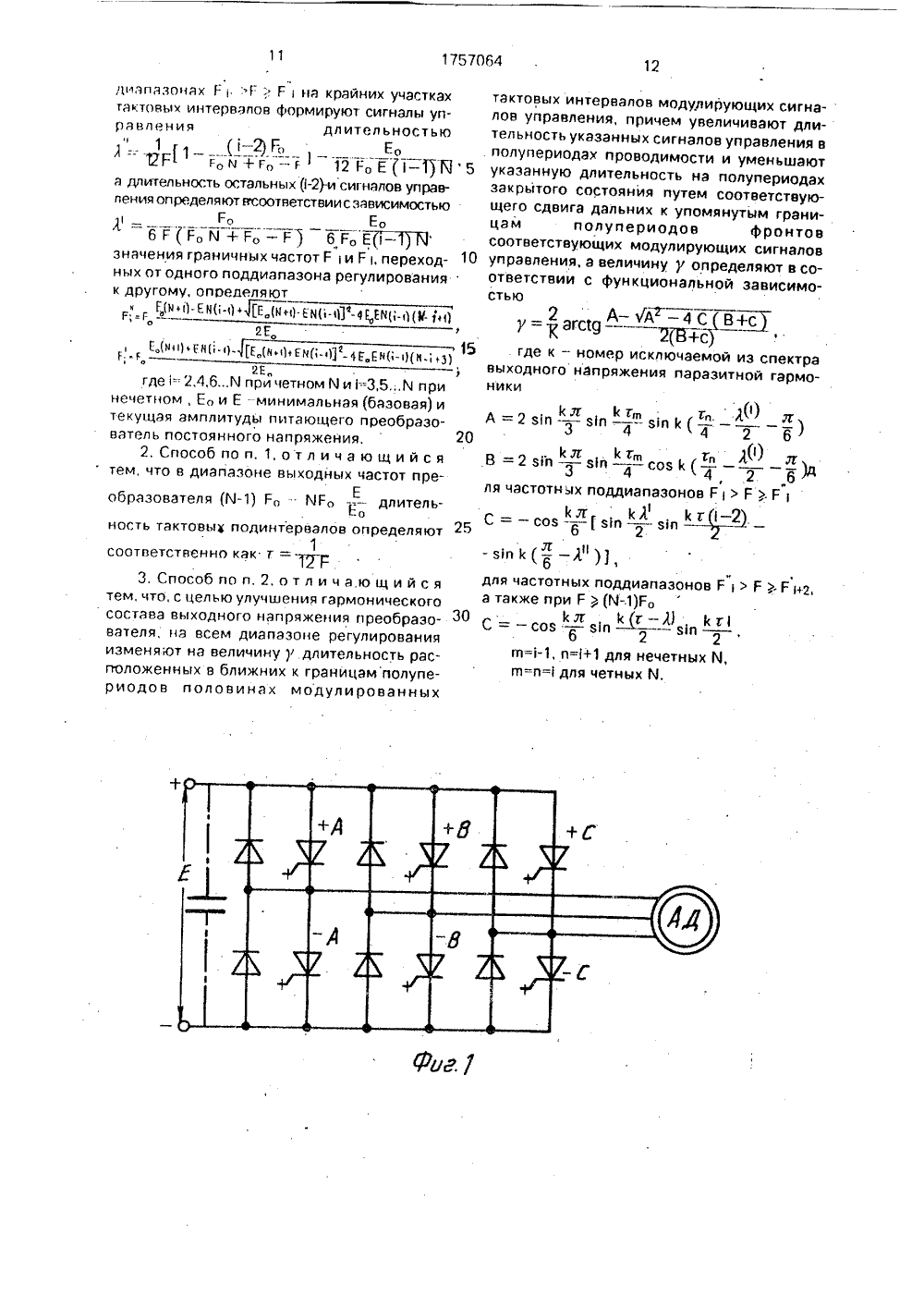
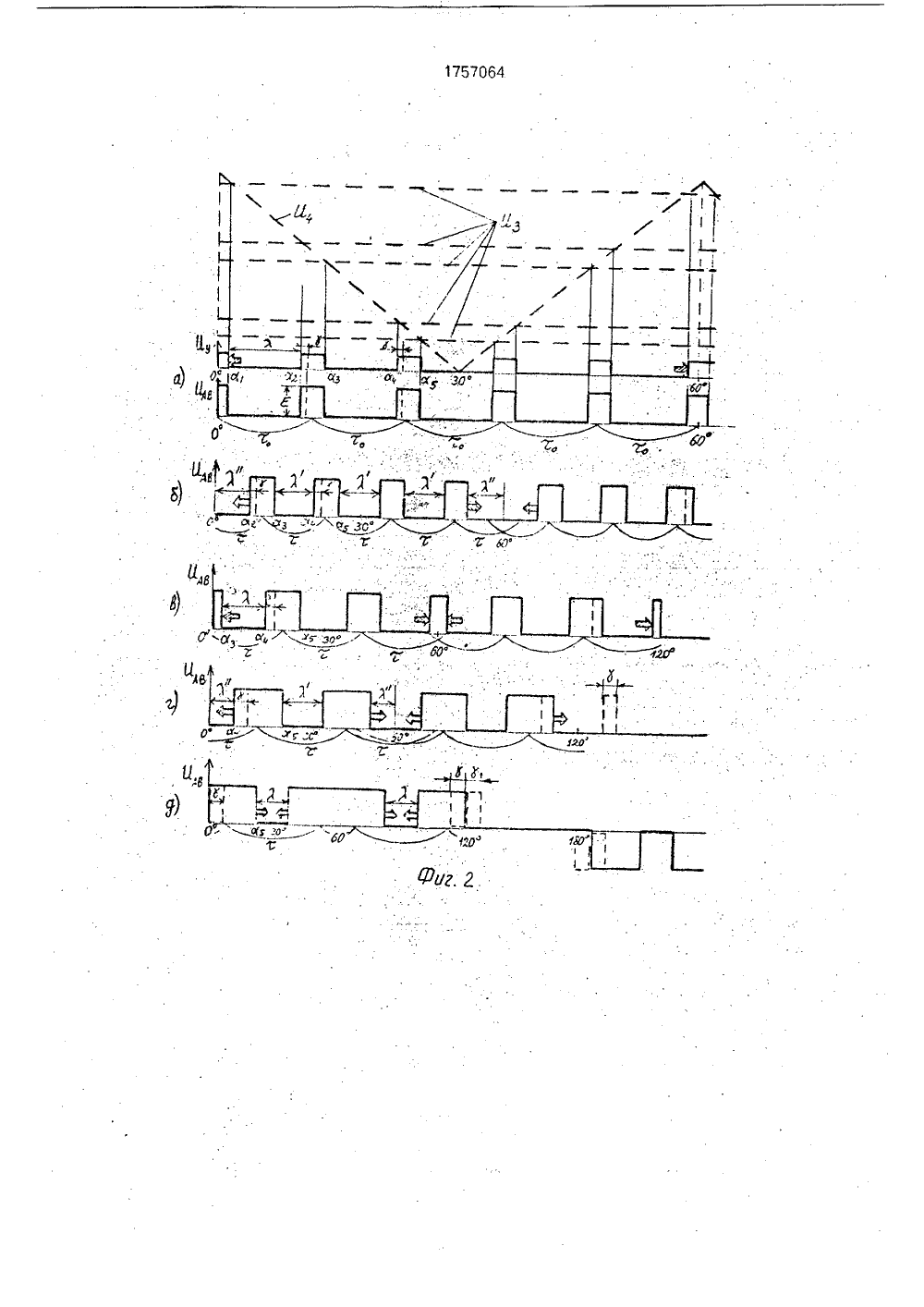
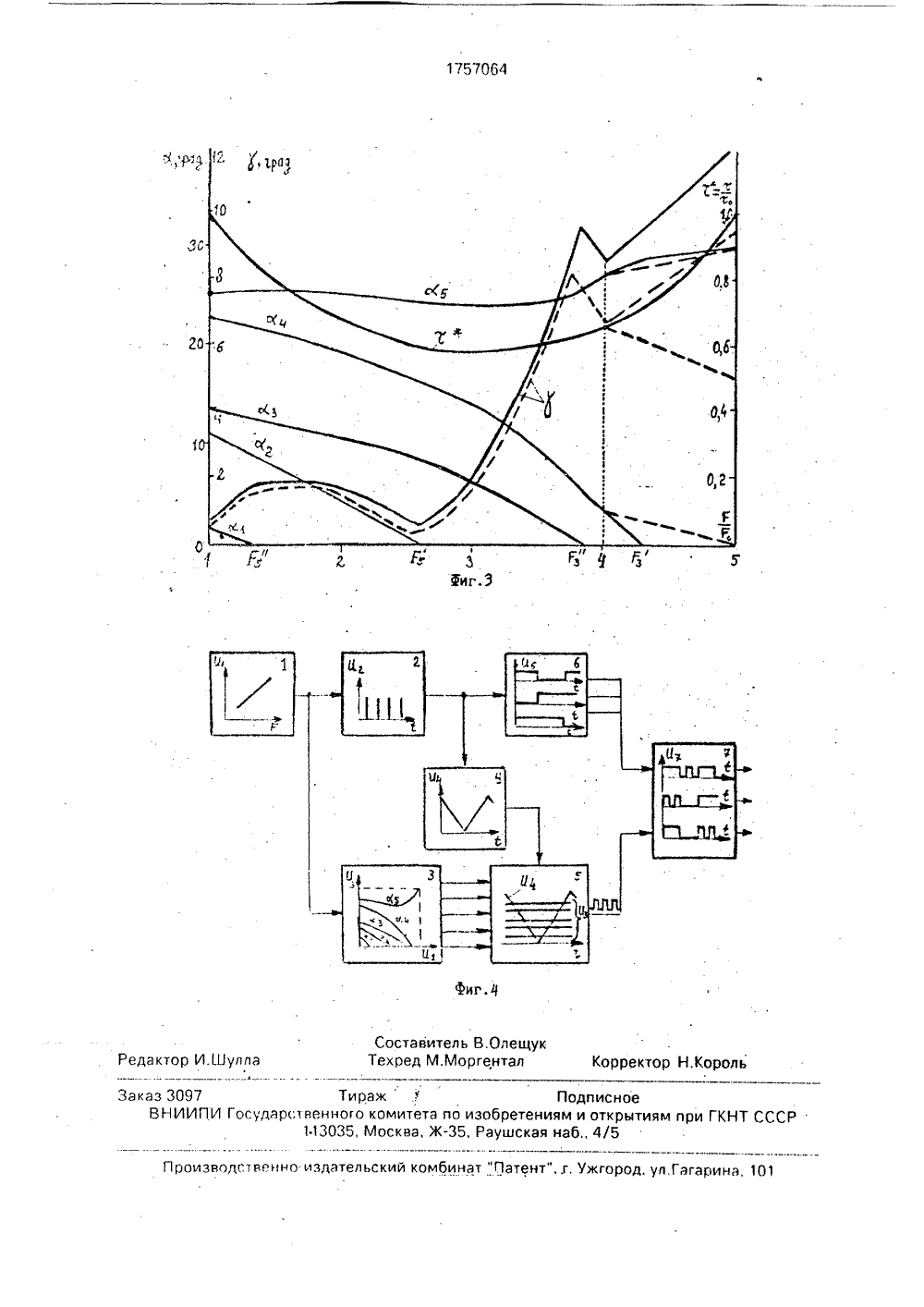
/48 51 Н 0 ОПИСАНИЕ ИЗОБРЕТЕ яС,туР.- те)т р,у.,ГГ Юб т р ат УС ГЧ бФ ВТОРСКО ЕТЕЛ ЬСТ к электротехнибразовательной и может быть нии преобразолируемого электока на базе ряжения,1 е алгоритмы ных мостовых усным управющие модулия на крайних алов, на котонтервэлы 60 ГОСУДАРСТВЕННЫЙ КОМИТЕГПО ИЗОБРЕТЕНИЯМ И ОГКРЫТИЯМПРИ ГКНТ СССР(71) Отдел энергетической кибернетики АН ССР Молдова(56) Забродин Ю.С, Автономные тиристорные инверторы с широтно-импульсным регулированием.-М,: Энергия, 1977, гл, 2,Авторское свидетельство СССР М 1361692, кл. Н 02 М 7/48, 1987.(54) СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ МОСТОВЫМ ПРЕОБРАЗОВАТЕЛЕМ С ШИРОТНО-КОДОВЫМ РЕГУЛИРОВАНИЕМ (57) Сущность изобретения: способ управления заключается в периодическом включении с взаимным фазовым сдвигом в 60 эл, . град основных вентилей трехфазного мостового преобразователя, при этом зоны проводимости и закрытого состояния каждого вентиля составляют по 180 эл. град, РелгтулиИзобретение относится ке (подкласс силовой прео техники и электропривода) использовано при управле вателями для частотно-регу тропривода переменного автономных инверторов нап Известны несимметричн управления ключами трехфаз преобразователей с 180-град лением, при которых управля рующие сигналы формируютс участках тактовых подинтерв рые разбиваются тактовые и градусных продолжительност рование выходного напряжения осуществляется при этом изменением продолжительности модулирующих сигналов, формируемых внутри крайних 60-градусных тактовых интервалов упомянутых зон проводимостизакрытого состояния вентилей; Связанное регулирование выходной частоты и величины выходного напряжения предложено производить зэ счет непрерывной плавной вариации длительностейосновных и модули рующих сигналов уйрэвления, формируемых у границ упомянутых крайних тактовых интервалов, Продолжительностьтактовых подинтервалов; внутри и посередине которых формируются модулирующие сигналы управления, нэвсем диапазоне регулирования изменяетСя: по нелинейной зависимости, обеспечивающей рациональное количество выходных импульсов в полуволйе выходной кривой на каждом частотном поддиапазоне, 2 з.п. ф-лы, 4 ил,Однако спектральный состав выходного Сйу бнапряжения преобразователей с подобными законами управления является не со- ( )всем хорошим и часто нуждается в специ йэльном улучшении,1 тФффдИзвестен также способ управления преобразователемм, обеспечивающий улучшен. ,)нуЮ форму выходного напряжения,характерной особенностью которого является формирование модулирующих управляющих сигналов внутри крайних тактовыхинтервалов полупериодов проводимости изакрытого состояния вентилей.Однако широкодиапазонное регулирование выходной частоты преобразователей,сопровождаемое изменением количествазначения граничных частот Еи Е ь переходных от одного поддиапазона регулирования к другому находят какЕ.(М Ейб-)- (Е,(ииЕНС(-(ц )Е.ЕНС;. )(И.;, )о2 Еои Г(и(.еи (ж )е.(и+ии.6(7 и(,е1 и-й ;ЕЕЕ.где=2,4,6 й при четном И и )=3,5 М при нечетном й, минимальная (базовая) и текущая амплитуды питающего преобразователь постоянного напряжения обозначены соответственно как Ео и Е.На фиг, 1 представлена упрощенная схема силовых цепей трехфазного мостового преобразователя, выполненного на полностью управляемых вентилях; на фиг, 2 - временные диаграммы, иллюстрирующие способ управления; на фиг. 3 - кривые, показываюшие изменение продолжительности тактовых подинтервалов и углов уйравления в пироцессе регулирования преобразователей; на фиг. 4 - функциональная схема системы управления преобразователем, реализующей сйособ.На верхней временной диаграмме (фиг.2 а) показан управляющий сигнал Оу, поступающий на вентиль+А на интервале времени 0 - 60 эл. град в течение первого тактового интервала положительного полупериода проводящего состояниявентиля, нэ начальной(минимальной) выходной частоте преобразователя Ео, На интервале 120 - 180 эл. град управляющие сигналы формируются аналогично, а на полупериоде закрытого состояния вентиля 180-360 эл, град аналогично и симметрично указанным формируются инверсные сигналы управления. Ниже построен соответствующий участок кривой линейного выходного напряжения преобразователя Оде, Построенные кривые соответствуют варианту пятикратного, при минимальном питающем напряжении, диапазона связанного регулирования частоты и величины напряжения (И=5). В этом случае тактовый интервал 0 - 60 эл, град (и 120 - 180 эл, град) на начальной частоте Ео разбит нэ 5 тактовых подинтервалов одинаковой длительности то, равной 12 эл. град каждый, внутри и посередине каждого из которых формируются модулирующие сигналы управления, разноименные с соответствующим полупериодом, имеющие в общем виде продолжительность 1 Ео- (1 -- )6 НЕо ЕМ де Ео и Е - соот импульсов в выходной полуволне, при уп- в равлении по алгоритму осуществляется дискретным путем и вызывает броски тока в силовых цепях в моменты перехода от одного поддиапаэона регулирования к другому, 5Цельюизобретения является повышение качества процесса регулирования за счет плавного безударного изменения формы выходного напряжения преобразователя.При управлении по способу, обеспечивающему М-кратное связанное регулирование частоты и величины выходного напряжения преобразователя по закону по стоянства отношения величины напряжения к частоте, при котором основные 15 вентили разных фаз и групп йреобрэзователя периодически включает и выключает с . взаимным фазовым сдвигом в 60 эл. град в последовательности +А, -С, +В, -А, +С, -В, при этом для каждого вентиля формируют 20 положительные полупериоды проводимо-.стии отрицательные полупериоды закрытого состояния, каждый из которых состоит из трех тактовых интервалов 60-градусных продолжительностей, внутри крайнйх на 25 полупериодах тактовых интервалов формируют модул ирующие сигналы (импульсы) управления, прадолЖительность которых определяет величину выходного напряжения преобразователя, формирование ука , занных модулирующих сигналов управления на всем диапазоне регулирования; начиная с начальной частоты Ео. осуществляют в серединах тактовых подинтервалов с продолжительностью 35 Г - Е ., причем серединыйоЕо И + Ео - Е ) упомянутых тактовых интервалов синхрони- зируют с серединой соответствующего центральног) тактового подинтервалэ (при 40 нечетном К) или с концом и началом соответствующих центральных тактовых подинтервалов (при четном М), при этом на частотных поддиапазонах ЕЕЕ+р, а также, приЕоп Е 45 нечетном М, в диапазоне Е з - , внутЕо ри тактовых интервалов формируют по модулирующих сигналов управления с1 1 Еодлительностью Х =- 6-,(. - Е Е ) на 50 частотных поддиапазонах Е Е Ена крайних участках тактовых интервалов формируют сигналы управления с длительностьюЕо Е -- , - .-(, а пРодОлжительность ос 4тальных-2).и с(инг Ов управлЕния ОпрЕдЕляЮтветственно минимальная (номинальная) и текущая величины питаю 1 цего преобразователь напряжения, В случае Е=Е(, при И=5 А = - (1 -- ).=9,6 эл. град. 60 15 5Увеличение выходной частоты преобразователя сопровождается изменением продолжительности г тактовых подинтервалов, осуществляемой по зависимостиоЕ т - 6 Е р е + Е Г- . При этом характерной особенностью рассматриваемого алгоритма управления является то, что в данном случае при нечетном и на всем диапазоне регулирования середины каждого из тактовых интервалов (т,е, точки с ординатами 30, 150, 210, 330 эл, град) синхронизируются с серединами соответствующих центральных тактовых подинтервалов, В случае четной величины Й середины тактовых интервалов синхронизируют с концом и началом соот- ветствующих двух центральных тактовых подинтервалов,Процесс регулирования частоты выходного напряжения преобразователя сопровождается при этом постоянной попеременной вариацией, как показано стрелками (фиг. 2), длител ностей основных и модулирующих сигналов управления, формируемых по краям тактовых интервалов, При этом для поддержания постоянства отношения величины выходного напряжения преобразователя к частоте на поддиапазонах регулирования, на которых по краям тактовых интервалов формируются основные сигналы управления, длительности модулирующих сигналов управления варьируют в зависимости от текущих значе-. ний выходной частоты Г и от количества 1: формируемых внутри тактовых интервалов модулирующих сигналов управления.в соответствии с выражением1 1 Е61 - ГоЕМВнутри поддиапазонов регулирования, на которых по краям тактовых интервалов синтезируются модулирующие сигналы управления, их (крайних на тактовых интервалах модулирующих сигналов) продолжительность А определяется как11 и 12 Го 12 Г Го И + Го - Г Ео, э длительность е,осталь- ных (1-2)-и модулирующих сигналов управления определяется какЕо6 ЙТТИ 0 К И Ио - Р)Значения граничных частот, переходных от одного поддиапазона к другому, при этом находятся соответственно какЕЕИ и ЕИЕ( А 4(Е.ЕИей ЕИС И 1 ЕЕ,ЕИЕ 1 Е И 1 Г,о.- 2 Е,ГоИЕ 1 И Е 11(1-Е . с- мгго2 ЕоДля всех рассматриваемых вариантовуправления нэ первом, начиная с частоты 10 Г, поддиапазоне регулирования выходной часготы преобразователя вверх от начального значения процесс регулирования осуществляется путем последовательного изменения (уменьшения, как показано стрелками на фиг, 2 а) продолжительности крайних на тактовых интервалах основных сигналов управления, Продолжительность 1 модулирующих сигналов. управление на ся по зависимости А = д (.р --- )1 Ео3) Г 5 ЕоЕПродолжительность г тактовых подинтервалов, как показано нэ кривой измене25 ния г (фиг. 3), на этом поддиапазонерегулирования резко уменьшается при повышении частоты, чем обеспечивается увеличение числа выходных импульсов вполуволне и улучшение гармонического состава выходного напряжения.Верхняя граница отмеченного первогочастотного поддиэпазона наблюдается начастоте Е 5= 1,31 Го, рассчитанной из условия Е=Ео, на которой продолжительность 35 крайних на тактовых интервалах основныхсигналов управления уменьшилась до близких к нулю значений.На следующем поддиапазоне регулирования (фиг. 2 б) по краям тактовых интерва лов формируются модулирующие сигналы спродолжительностью А, а длительность11остальных модулирующих сигналов равна А, при этом А и А определяется из 1 11выражений подстановкой соответствующих К=5 и 1=5. Верхней границей этого поддиапазона (при Е=Ео) является частота Е 5= 2,56 Ео, на каждой продолжительности Х снижаются до близких к нулю значений,Следующий поддиапазон управления лежит в зоне выходных частот Е 5 . Е Е з=3,83 Ео и характеризуется уменьшенным на две единицы количеством модулирующих сигналов управления внутри тактовых интервалов (1=3) (фиг, 2 в), В этой зоне, как 45 50 55 следует из кривых (фиг. 3), наблюдается, начиная с частоты Е=ЗЕо, постепенное увеличение абсолютной продолжительноститактовых подинтервалов, В диапазоне вы 20 этом поддиапазоне при Й=5 и 1=5 изменяетходных частот преобразователя Е з - Е з =4,26 Го (при Е-. Ео), которому соответствуютвременные диаграммы линейного выходно,го напряжения (фиг. 2), формируются двакрайних модулирующих сигнала с продолжительностью А и один центральный с1длительностью 1, а с часто-ы Ез и до1верхней (номинальной) частоты преобразоМ Ео Евателя Еп= (фиг, 2 д) в центрах такЕотовых интервалов формируется по одномумодулирующему сигналу управления с продолжительностьюю1 1 Ео 1 1 Ео6 Г Е Ео К ) Б- - Е 11 )длЯслучая Е=ЕО, При варианте четной величиныиндекса М указанная величина совпадает срассчитываемыми по указанным зависимостям граничными значениями частот Е г иЕг,Для улучшения гармонического состававыходного напряжения преобразователяцелесообразно модифицировать алгоритмуправления таким образом, чтобы в кривойвыходного сигнала на всем диапазоне регулирования формировалась, как показанопунктиром (фиг, 2), дополнительная последовательность выходных импульсов, гармонические составляющие которой,суммируясь в противофазе с гармоникамиосновного массива выходных импульсов,способствовали бы тем самым устранению(уменьшению) амплитуд наиболее нежелательных паразитных гармоник результирующей кривой,Для этого должна соответствующим образом измениться продолжительность модулирующих сигналов управления,формируемых в ближних к границам соответствуктщих полупериодов половинах тактовых интервалов. При этом внутриположительных полупериодов проводимости продолжительности модулирующих сиг.налов должны быть увеличены наопределенную величину у, а внутри отрицательных полупериодов закрытого состояния длительн.ости требуемыхмодулирующих сигналов догжны уменьшаться на ту же величину, Процесс отмеченного изменения продолжительностимодулирующих сигналов управления осуществляется в этом случае соответствующимсдвигом дальних по отношению к границамполупериодов фронтов модулирующих сигналов управления,Для обеспечения полноценной компенсации амплитуд параэитных армоник наверхнем диапазоне регулйрования целесообразно, начин.я с частоты (М)Ео и до мак симальной выходной частоты преобразоваГо К Етеля Еп= . Е, продолжительность такЕотовых подинтервалов поддерживать равной 5 1т = -2 , Задаваясь, в частности, номером к подлежащей полному исключению из спектра выходной кривой гармонической составляющей, величина у на всем диапа зоне регулирования может быть определенакак дГС 192 к15 где4 ( 41 л, 1 т гпти3 41 д кт щиВ =2 з 1 п - з 1 п соз 1 ( -3 4 . 4 Р- )2 6(1) Л6 2 для частотных поддиапазонГ ",1,.г Ф 1 г 11 2- зп 1 ( -6ГЕ Гщ,т 11и е=п=1 для для частотных поддиапазонов30 а также при Е, (К)ЕО:1 у(г - Я),С =. - соз - з 1 п - з 1 п6 2 2щ=1-1, и=1+1 для нечетных Мчетных й.35 Характер изменения относительной,выраженной в зл, град, величины у для конкретного анализируемого режима (Й=ь) дляЕ= Ео (сплошные линии) и Е=1,2 ЕО (пунктирные линии) показан на фиг. 3,40 Обобщенная функциональная схема системы управления преобразователем выполнена по вертикальному принципу иреализует способ управления (фиг, 4). Навыходе блока 1 задания частоты формирует 45 ся сигнал 01, прямо пропорциональный значению выходной частоты преобразователя,который поступает на входы тактового генератора 2 и функционального М-канальногопо выходу преобразователя 3, Частота сле 50 дования импульсов генератора 2 определяет частоту выходного сигнала блока(генератора) развертывающего пилообразного напряжения 4, которая при атом навсем диапазоне регулирования в 6 раз выше,55 выходной частоты преобразователя,Сигнал генератора 4 непрерывно сопоставляется в блоке 5 формирования управляющих импульсов с выходными сигналами1.1 з функционального преобразователя 3, величина которых пропорциональна текущимзначениям положений фронтов выходных импульсов а внутри тактовых интервалов(фиг, 2 а), При этом работа блока 4 и трехфазного регистра 6 синхронизируется путем начальной уставки таким образом, чтобы нулевые (минимальные) значения сигналаО 4 соответствовали серединам тактовых интервалов.Значения углов регулирования апредварительно определя ются-расчетным: 10путем из указанных соотношений, характеризующих режим осуществления способауправления, относительные, выраженные вэл, град, величины углов а 1- а 5 дляварианта 8=5 при Е=Ео (сплошные линии) и 15Е=1,2 Ео (пунктирные линии) построены.нафиг. 3, В моменты равенства текущих значения сигналов блоков 3 и 4 блоком 5 вырабатываются команды на формированиефронтовупраеляющих(и выходных) импульсов, которые распределяются по соответст-.вующим венти 1 лямири помощи логического "распределителя 7 управляющих импульсов, Задавая состбяния выходов Оэ 02 01 регистра 6 напериоде выходной частоты как 100, 25 001, 000, 101. 110, 111, 100 , логическиеуравнения, реализуемые распределителем7 и поступающие в форме управляющих сйгнаттов на вентили соответствующих фаз пре 30образователя, имеют следующий вйд.+С=0102+010305+010205,Для формирования дополнительной последовательности импульсов при необходи-мости улучшения гармонического состававыходного напряжения соответствующимобразом увеличивается количество выход-ных каналов функционального преобразователя 3, регистр 6 должен выполнятьсячетырехразрядным с соответствующей модификацией логических функций, выполняемых распределителем 7. Ввидусущественно нелинейного характера реали зуемых закономерностей в качестве аппа- ратурной основы рассмотренной функциональной схемы системы управления должна быть использована цифровая микроэлектроника. 50Таким образом, способ управления позволяет заметно улучшить качество процесса связанного широкодиапазонного регулирования величины и частоты выходного напряжения преобразователей для 55 электропривода за счет устранения бросков тока в силовых цепях преобразователя и нагрузки, возникающих в моменты изменения количества импульсов в полуволне выходной кривой.Гармонический состав выходного напряжения при этом в диапазоне низких и средних выходных частот является достаточно удовлетворительным из-за увеличенного количества сигналов в выходной полуволне; обеспечиваемого за счет специальной нелинейной модуляции продолжительности тактовых подинтервалов. Отмеченные преимущества делают перспективным использованйеспособа при управлении преобразователями, питающими системы как общепромьилленного, так и высоковольтного и прецизйонного частотно- регулируемого . электропривода переменного тока. формула изобретения 1, Способ управления трехфазным мостовым преобразователем с широтно-кодовым регулированием, заключающийся в том, что основные вентили разных фаз и групп преобразователя периодически включают и выключают с взаимным фазовым сдвигом в 60 эл. град впоследовательности 1.А, -С, В, -А, +С, -В, при этом для каждого вентиля формируют положительные полупериоды проводимоСти и отрицательные полупериодызакрытого состояния, каждый из которых состоит из трех тактовых ийтерва.лов градусных длительностей, внутри крайних на полупериодах тактовых интервалов формируют модулирующие сигналы управления, о т л и ч а ю щ и й с я тем, что, с целью повышения качества процесса регулирования за счет плавного безударного .изменения формь выходного напряжения преобразователя в ходе Й-кратного связанного регулирования частоТы Р и величины напряжения по закону постоянства отношения величины напряжения к частоте, формирование указанных модули рующих сигналов управления на всем диапазоне регулирования, начиная с начальной частоты Ео, осуществляют в серединах тактовых подинтервалов с длительностьюоГ = и н П.ЯГ=1 ц" щ щщ ны упомянутых тактовых интервалов синхронизируют с серединой соответствующего центрального тактового подинтервала при нечетном М или с концом и началом соответ- . ствующих центральных тактовых подинтервалов при четном Й, при этом на частотных поддиапазонах Е; Е Г 1+2 внутри тактовых интервалов формируют помодулирующих сигналов управления длительностью1 1 Ь=-( - ) на частотных подЕо Е йдиапазонах ГГ:. Гна крайних участкахтактовых интервалов формируют сигналы управления длительностью 1 =-. -1 Р 1 -- - . - : -- ,го) +го - г 12 Го Е ( - 1) М 5 а длительность остальных -2)и сигналов управления определяют всоответствии с зависимостьюЕо6 ГГо й + Го - Г ) б, Го Е( - 71 Чзначения граничных частот Ги Г ь переходных от одного поддиапазона регулированияк другому, опоеделяютГ(н -ем-) ф 4 е,(и+1).ем(.4 -ФГ ен(м)(У)2 Е15Ео(Мф)+ Ей(.ф)- Е.(й+ф)Ей-) - Ф Е.ЕН(-)(Н-ю 5)2 Егде (=: 2,4,6 й при четном й и (=-3,5,.Л принечетном, Е и Е -минимальная (базовая) итекущая амплитуды питающего преобразователь постоянного напряжения. 202, Способ по п. 1, отл и ч а ю щи йс ятем, что в диапазоне выходных частот преЕ образователя (й) Го йГО в . - длительноность тактовыми подинтервалов определяют1соответственно как г =.3. Способ по п. 2, о т л и ч а.ю щ и й с я тем, что, с целью улучшения гармонического состава выходного напряжения преобразователя, на всем диапазоне регулированияизменя от на величину у длительность расположенных в ближних к границамполупериодов половинах модулированных тактовых интервалов модулирующих сигналов управления, причем увеличивают длительность указанных сигналов управления в полупериодах проводимости и уменьшают указанную длительность на полупериодах закрытого состояния путем соответствующего сдвига дальних к упомянутым границам полупериодов фронтов соответствующих модулирующих сигналов управления, а величинуопределяют в соответствии с функциональной зависимостью2 А - 1 ГА - 4 СВ+с )где к - номер исключаемой из спектра выходного напряжения паразитной гармоники-з(п( -- А )3лбдля частотных поддиапазонов ГГ . Г (+2,а также при Г(й)ГОМл М(г - Л 1 тС = - соз - з(п - зи6 2 2гп=(-1, и=(+1 для нечетных й,т=п= для четных й,1757064 и оставитель В.Олещ хред М.Моргентал Корректор Н,Король едактор И,Ш ТС ательский комбинат "Патент".,г, Ужгород. ул.Гагарина, 10 Г 1 роизводстве каз 309784 ИИПИ Г Тираж сгвенного к 113035, МПодписноеитета по изобретениям и открытиям приква, Ж, Раушская наб 4/5
СмотретьЗаявка
4897389, 29.12.1990
ОТДЕЛ ЭНЕРГЕТИЧЕСКОЙ КИБЕРНЕТИКИ АН ССР МОЛДОВА
ОЛЕЩУК ВАЛЕНТИН ИГОРЕВИЧ
МПК / Метки
МПК: H02M 7/48
Метки: мостовым, преобразователем, регулированием, трехфазным, широтно-кодовым
Опубликовано: 23.08.1992
Код ссылки
<a href="https://patents.su/8-1757064-sposob-upravleniya-trekhfaznym-mostovym-preobrazovatelem-s-shirotno-kodovym-regulirovaniem.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления трехфазным мостовым преобразователем с широтно-кодовым регулированием</a>
Способ формирования опорных сигналов для многоканальной системы управления преобразователем частоты

Номер патента: 1589355
Опубликовано: 30.08.1990
МПК: H02M 1/08
Метки: многоканальной, опорных, преобразователем, сигналов, системы, формирования, частоты
...амплитуды напряжений питающей сети, Эталонный сигнал начального уройня (Пяяу фиг,3 ж), получаемый суммированием . регулирующих сигналов, также регулируется с большим быстродействием при изменении амплитуды напряжений питающей сети. Причем с увеличением амплитуды напряжений питающей сети, эталонный сигнал начального уровня увеличивается, а с уменьшением - уменьшается. При изменении частоты напряжения питающей сети также осуществляется быстродействующее регулирование амплитуды регулирующих сигналов, и соответственно, быстродействующее регулирование эталонного сигнала начального уровня (Н , фиг,2 ж), причем с увеличением частоты Б , уменьшается, а с уменьшением частоты Уу увеличивается пропорционально частоте, Таким образом...
Формирователь тактовых импульсов для управления преобразователем частоты
Номер патента: 1737673
Опубликовано: 30.05.1992
Авторы: Иванов, Уржумсков, Шалагинов
МПК: H02M 7/48
Метки: импульсов, преобразователем, тактовых, формирователь, частоты
...напряжение Он, пропорциональное напряжению на нагрузке преобразователя, прикладывается к входному выпрямителю 1 и через ключи 2 и 3, работающие противофазно под управлением триггера 8, подается на входы интеграторов 4 и 5,Пусть на выходе триггера 8 присутствует напряжение высокого уровня интервал то - 11 на фиг. 2, диаграмма Оа), следовательно, ключ 2 включен, а ключ 3 - выключен, Напряжение с выхода выпрямителя 1 - О 1 приложено к входу интегратора 4. Накопительный конденсатор интегратора 4 перед этим разряжен - когда на время переднего фронта сигнала 0 замыкается ключ интегратора 4. Время замыкания ключа интегратора 4 - не более времени переключения триггера 8, обеспечивается дифференцирующей цепочкой 6.Конденсатор интегратора 4 в...
Дробно-пропорциональный преобразователь частот

Номер патента: 1626383
Опубликовано: 07.02.1991
Авторы: Лилеин, Псурцев, Терентьев
МПК: H03L 7/08
Метки: дробно-пропорциональный, частот
...и,к) Выходов соответствующих первого Второго, ., Й-го фазовых детекторов 41, 42, 44 поступают на входы сумматора 5, (остоянная составляющая фазовых рассогласований возрастает на выходе сумматора 5 в М раз, а переменная (низкоча;тотная) усредняется эа счет сдвига фаэ (фиг.2 л),Высокочастотные пульсации Вьходног. сигнала сумматора 5 устраняются фильгром 6, Сигнал с выхода 1 ильтра 6 оступаег на угравляельй генератор 7,МН С 2 СОдЕржит К НС 81- 84 С СООт ВЕтственно параллельно соединеньми сходами переноса, числовыми входами, тактовыми входами и входами устацэвк, . ыходь переоса 4 НС 81-Ог являются Выходами МНС 2.Нл фиг, 4 показаны временные ди; гр.:;лмы работаь МНС 2 для сучая, когда число его (аз равно четырем, а старшие р зряды дробной...
Автокомпенсационный преобразователь малых сигналов постоянного напряжения в частоту

Номер патента: 377851
Опубликовано: 01.01.1973
Авторы: Белоголовин, Воробьев, Древецкий, Журавлейко, Лисогор, Олефир, Примак, Рудавский, Фельдборг, Фурман, Щербань
МПК: G08C 19/12
Метки: автокомпенсационный, малых, постоянного, сигналов, частоту
...контуры 1.,С, и 1.,Са, каждый из которых симметрично расстроен отнооительно номинальной частоты сигнала, вырабатываемого мультивибратором,Преобразователь работает следующим образом,В исходном состоянии, прп заданной температуре окружающей среды и номннальном напряжении источника питання, на управляющую обмотку мультивибратора,поступает номинальный сигнал от датчика 2. Мульти- вибратор вырабатывает прямоугольные импульсы средней частоты, которые подаются через обмотку %ь,на вход двухтактного усилителя. Отклонение сигнала, поступающего от датчанка на управляющую обмотку мультивибратора, от номинального вызывает отклонение генерируемой мультивибратором частоты от средней. Следовательно, любое отклоненне параметров датчика от...
Способ управления трехфазным преобразователем частоты

Номер патента: 471646
Опубликовано: 25.05.1975
Авторы: Зиновьев, Попов, Уланов
МПК: H02P 13/24
Метки: преобразователем, трехфазным, частоты
...широтно-импульсной модуляции линейным напряжением. Интервал подключения одной из фаз к положительному зажиму источника питания может находиться в интервале наиболее положительного значения этой фазы, а подключение к отрицательному полюсу источника в интервале, когда эта фаза наиболее отрицательная по отношению к двум другим.В интервале 1 фаза В, имеющая наибольшее отрицательное значение, включением вентиля 6 (управляющий сигнал У фиг. 2,в) подсоединяется к отрицательному полюсу источника питания. В момент отрицательного спада пилообразного напряжения У,(фиг. 2, а) включаются вентили 1 и 7 (управляющие сигналы У и й на фиг, 2,в). В момент сравнения положительного фронта пилообразного напряжения и модулирующего ав (фиг, 2, а) включается...
Предыдущий патент: Способ управления преобразователем с широтно-кодовым регулированием
Следующий патент: Способ управления мостовым преобразователем с широтно кодовым регулированием
Случайный патент: Устройство для крепления колец при отрезке