Устройство для моделирования удара твердых тел
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1567889
Авторы: Кривоносов, Спичек, Филиппов
Текст
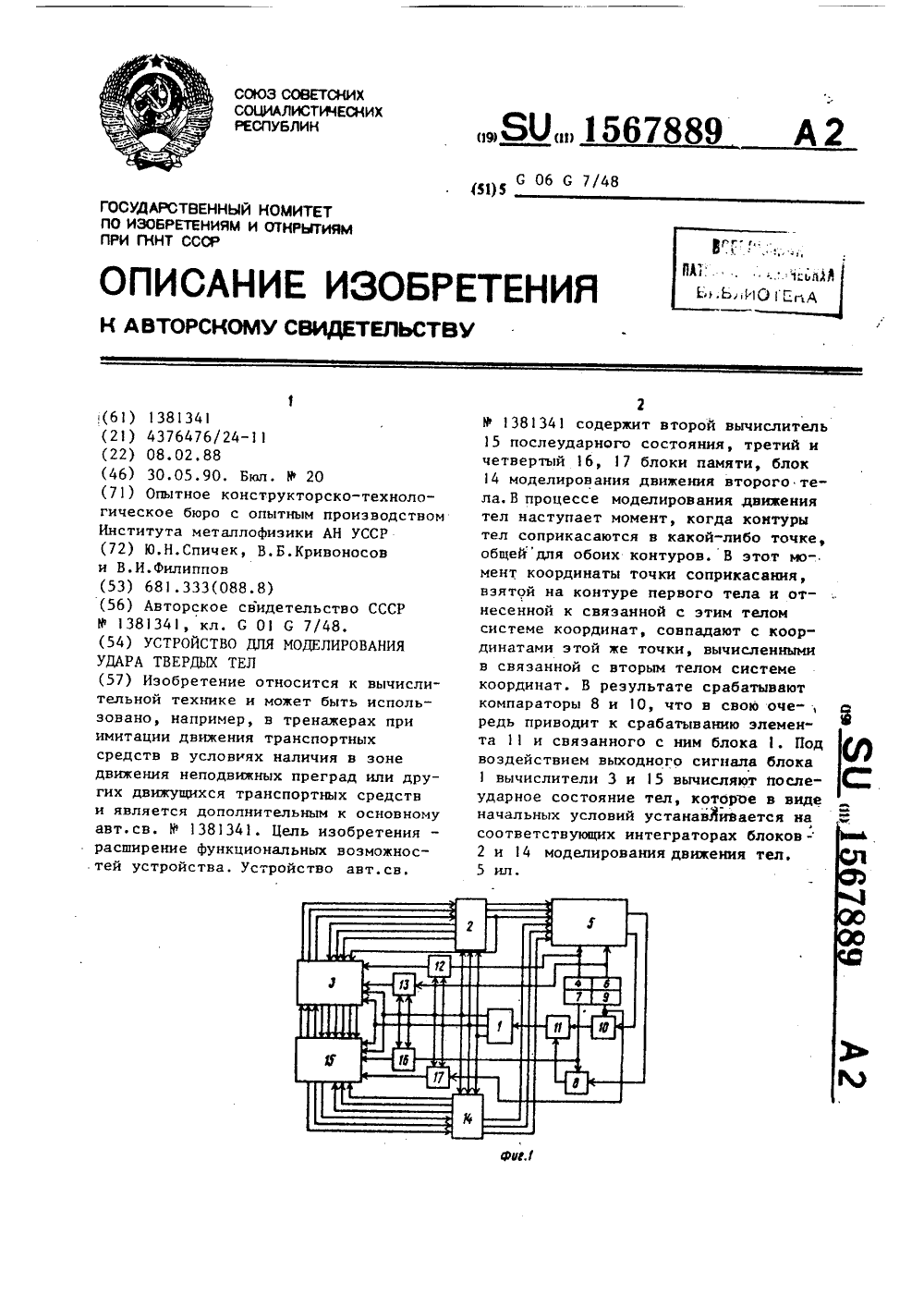
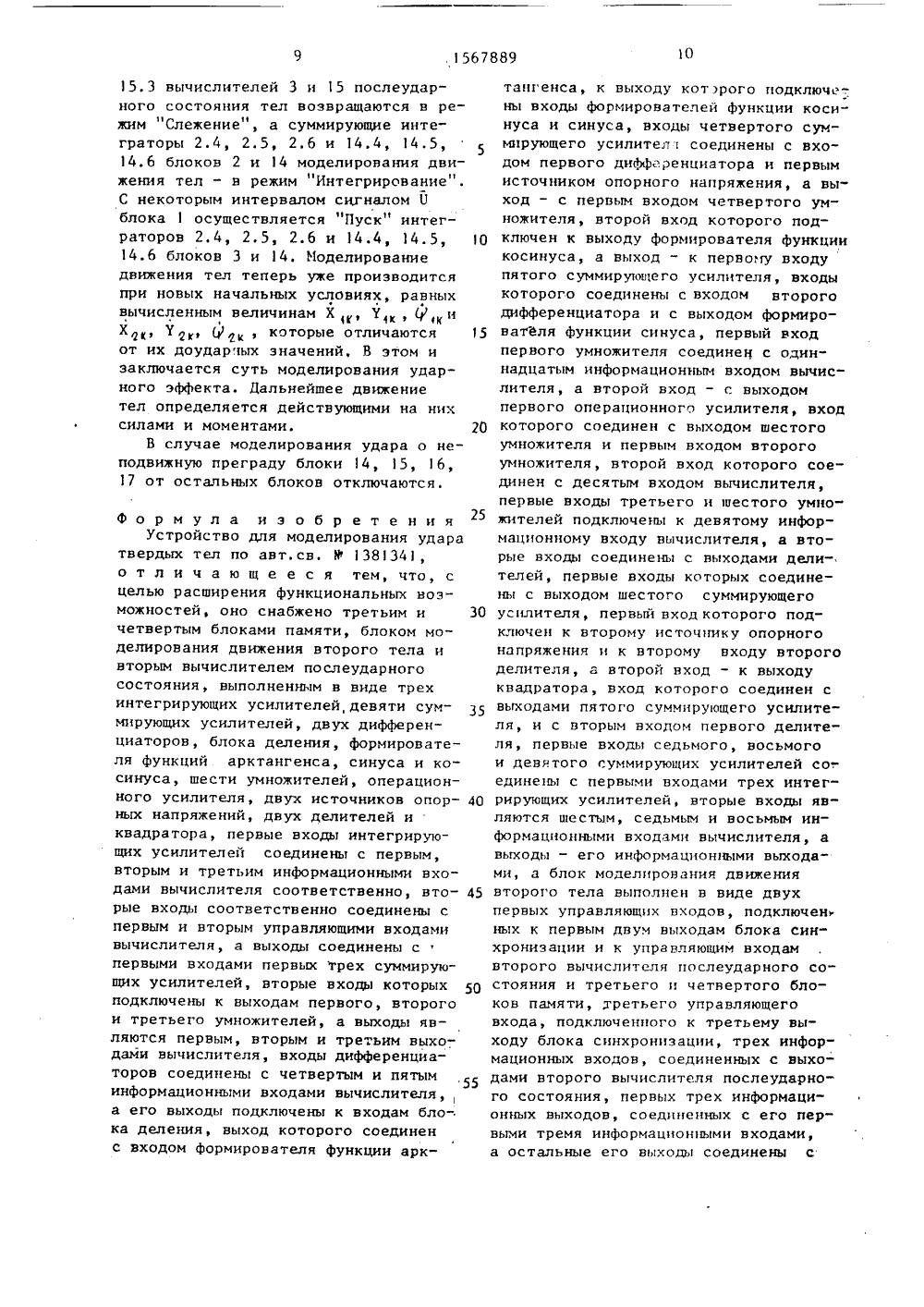
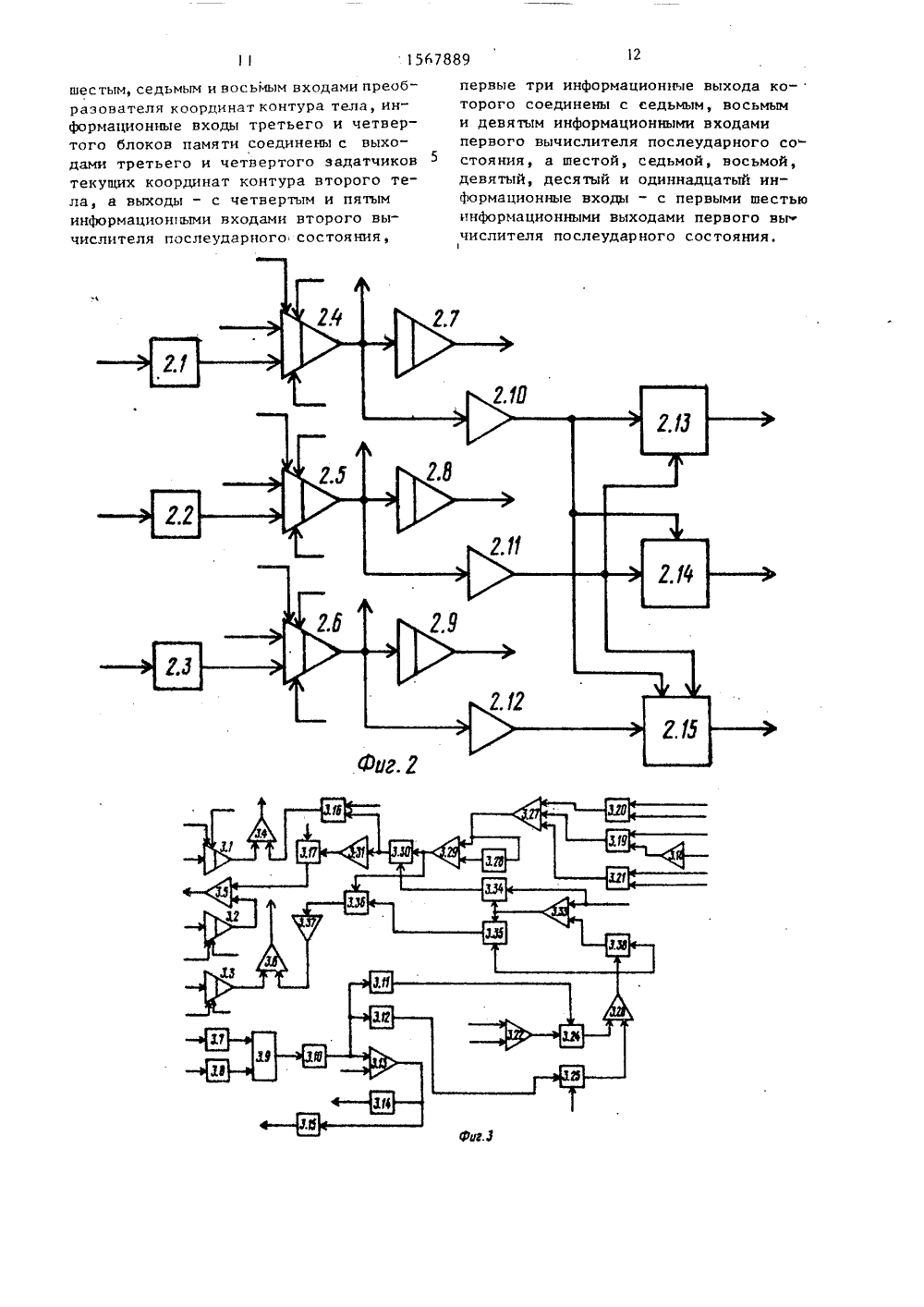
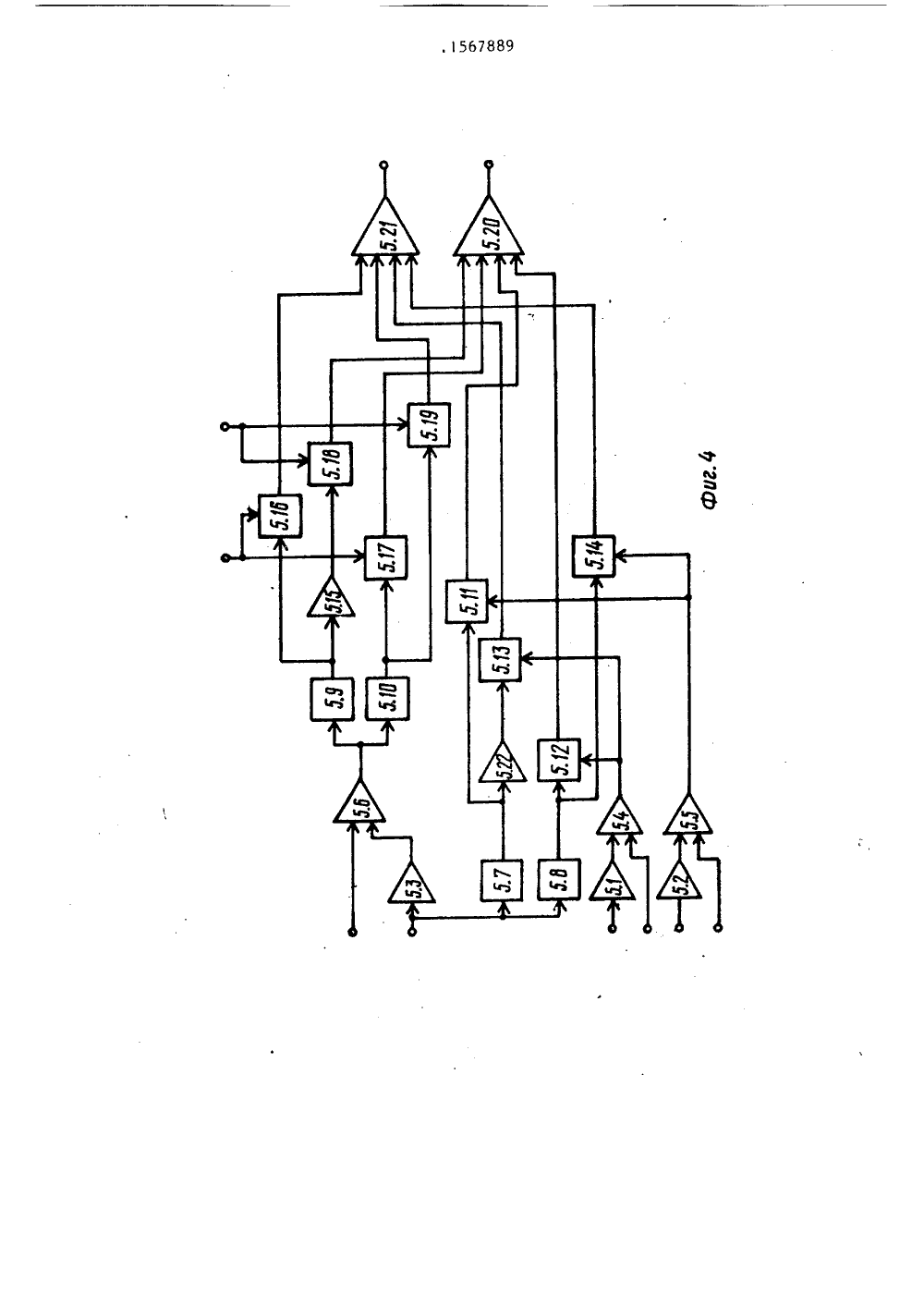
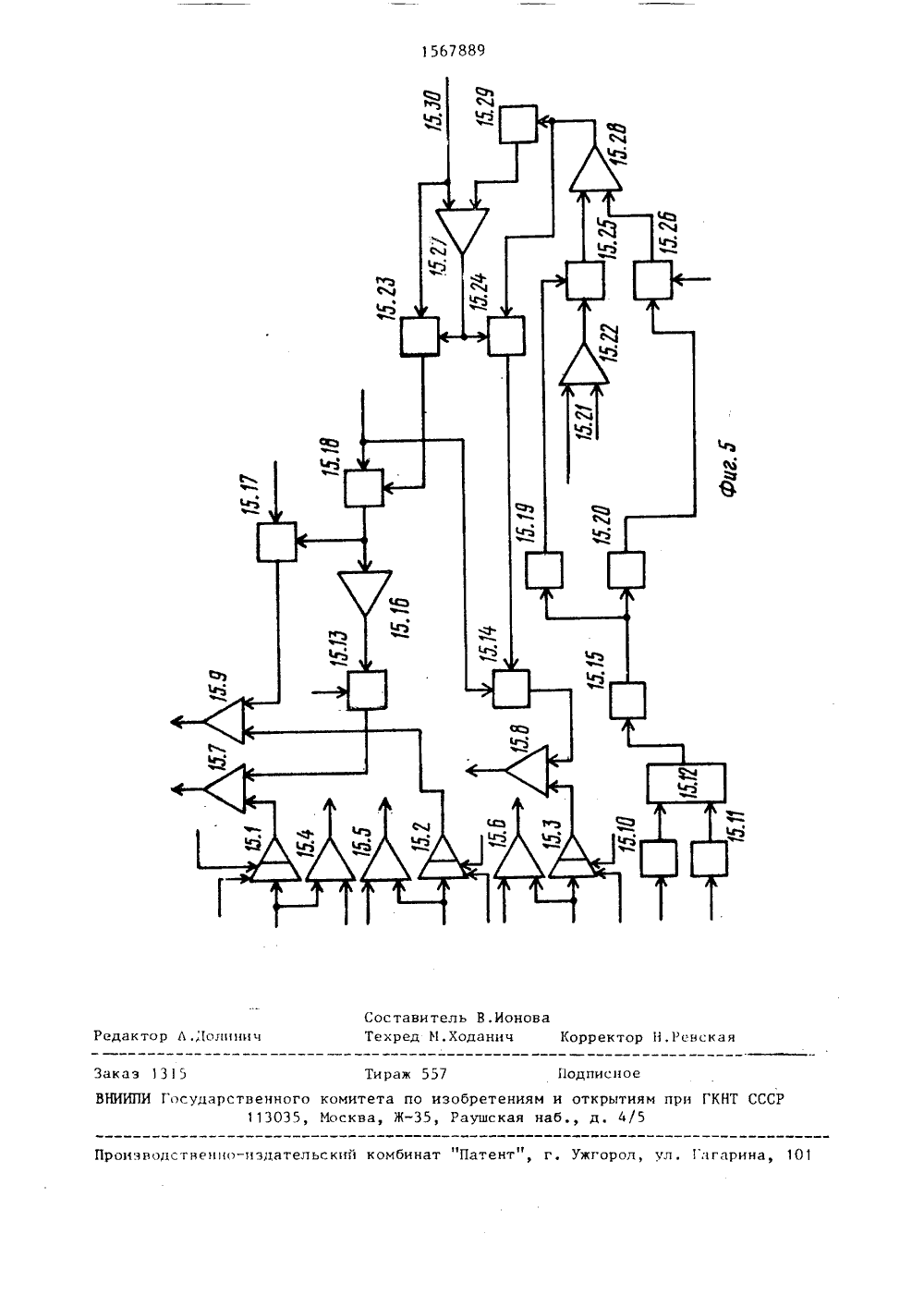
(2) Изобретение относится к вычислительной технике и мажет быть испольэовано, например, в тренажерах приимитации движения транспортныхсредств в условиях наличия в зонедвижения неподвижных преград или других движущихся транспортных средстви является дополнительным к основномуавт,св. У381341.10Цель изобретения - расширенияфункциональных вазможностей устройства.На фиг. 1 представлена блок-схемаустройства; на фиг.2 - блок-схема бло ков 2 и 14; на фиг.3 - блок-схема вычислителя 3; на фиг.4 - блок-схемапреобразователя 5; на фиг.5 - блоксхема вычислителя 15,Устройство содержит блок 1 синхрониэации, блок 2 моделирования движения первого тела, содержащий делители2. 1-2.3, суммирующие интеграторы 2.42,6, интеграторы 2.7-2.9, инвертирующие усилители 2.10-2.2, сумматоры 252.13-2,15, вычислитель 3 последовательного ударного состояния первоготела, включающий интегрирующие усилители 3.1-3.3, суммирующие усилители3.4-3,6, дифференциаторы 3.7-3.8,блок деления 3.9, формирователь 3.Офункции арктангенса, формирователь3. 11 функции косинуса, формирователь3.12 функции синуса, суммирующий усилитель 3.13, формирователь 3.14 функции синуса, формирователь 3.15 функции косинуса, умножитепи 3.16 и 3.17,операционный усилитель 3.18, умножители 3. 19-3. 21, суммирующий усилитель3.22, источник 3,23 опорного напряжения, умножители 3.24 и 3.25, суммирукщие усилители 3.26 и 3.27, масштабный усилитель 3.28, суммирующий усилитель 3.29, умножитель 3,30, операционный усилитель 331, истОчник 3.32 45опорного напряжения, суммирующий усилитель 3.33, блоки деления 3.34 и3,35, умножитель 3.36, операционныйусилитель 3.37, квадратор 3.38, первый задатчик 4 текущей координаты кон.тура первого тела, преобразователь5 координат контура первого тела, содержащий инверторы 51-5.3, сумматоры5.4-5.6, синусный преобразователь 5.7,косинусный преобразователь 5.8, синус 55ный преобразователь 5.9, касинусныйпреобразователь 5.10, перемножитель5.11-5.14; инвертор 5.15, перемнажитель 5.16-5.19, сумматоры 5.20 и 5.21 инвертор 5.22, второй эадатчик 6 текущей координаты контура первого тела, первый задатчик 7 текущей координаты контура второго тела, первый компаратор 8, второй задатчик 9 текущей координаты контура второго тела, второй компаратор 10, элемент И 11, блоки 12 и 13 памяти, блок 14 моделирования движения второго тела, вычислитель 15 послеударного состояния второго тела.Вычислитель 15 содержит интегрирующие усилители 151-15.3, суммирующие усилители 15,4-15.9, дифферэнциаторы 15.10 и 15.11, блок 15.12 деления, умножители 15.13 и 15.14, формирователь 15.15 функции арктангенса, инвертор 5.16, умнажители 5.17 и 15.18, формирователь 15.19 функции косинуса, формирователь 15.20 функции синуса, источник 15.21 опорного напояжения, суммирующий усилитель 15.22, умнажители 15.23-15.26, суммирующие усилители 15,27 и 15.28, квадратор 15.29, источник 15.30 опорного напряжения и блоки 16 и 17 памяти.Блок 2 моделирования движения первого тела решает следующие дифференциальные уравнения текущие координатыцентра тяжести и уголкурсового разворота,отсчитываемые относительно неподвижной(земной) системы координат и относящиесяк первому телу;текущие значения скоростей упомянутых параметров, ш, - массапервого тела;радиус инерции первого тела; силы и момент, приложенные к первому телу. Блок 14 моделирования движения второго тела решает следующие дифференциальные уравнения:(8) где- угол между касательной к контуру второго тела и продоль - ной осью последнего; ( ) 1- текущие координаты точки контура второго тела; (О) ди - продольный размер второго40(11) Работу устройства рассмотрим напримере удара тел, поверхности которых абсолютно гладкие.За счет действия сил Р, Р и45 момента Ми сил Рд, Ри моментаМ, приложенных соответственно к первому и второму телам, последние меняют свое пространственное положение,Сигналы Р Р и М поступают на50 входы интеграторов 2,4, 25, 2.6 соответственна. При этом блок 2 моделирования движения (фиг2) в соответствии с уравнениями (1) ."с однойстороны на выходах интеграторов55 2.4.2.5, 2.6 формирует сигналы, пропорциональные инверсным значениям со"ставляющих скорости центра тяжестипервого тела Хр -У и угловой скорости, на выходах интеграторов г, Х совЫ + УвдпЫ.; Ф Х Х- -Ф д 2 РА агсг 8 -дЙх текущие координаты центра тяжести и угол курсового разворота, отсчитываемые относительно неподвижной5 (земной) системы координат и относящиеся ко второму телу; текущие значения ско ростей упомянуьх параметров;масса второго тела; радиус инерции второго тела; 15)2.р2М силы и момент, приложенные ко второму телу.Вычислитель 3 вычисляет послеудар ное состояние первого тела согласно следующим формулам: где К - коэффициент восстановленияскорости;К - угол между касательной к,контуру первого тела и продольной осью последнего;угол между касательной кконтуру первого тела и неподвижной (земной) осью (текущие координаты точки контура первого тела);д - продольный размер первоготела.Преобразователь 5 вычисляет текущие координатыточки контура первого тела, взятые в связанной со вторым телом системе координат, в соответст. -вии со следующими формулами вщ -(Х, -Х )вдп 1 +(У -У )сов +Вычислитель 15 вычисляет послеударное состояние второго тела согласно следующим формулам2.7, 2.8, 2.9 формирует сигналы, пропорциональные координатам центра тяжести Х Уи углу курсового разворота 4,. Группа сигналов - Х, -Ув поступает на входы вычислителя 3 после ударного состояния первого тела, а группа сигналов Х, У, Щ - на входы преобразователя 5 координат.Аналогич.о в соответствии с урав нениями (2) блок 14, моделирования движения второго тела формирует сиг 1 1налы -Х , -У , -, поступающие на входы вычислителя 15 послеударного состояния второго тела, и группу сиг налов Х, У , (1, поступающие на входы преобразователя 5 координат. С момента включения устройства задатчики 4,6 и 7,9 на своих выходах формируют сигналы, пропорциональные текущим ко 20 ординатам точек контуров тел. По сигналам блоков моделирования движения 2 и 14 и задатчиков 4 и 6 преобразователь 5 производит вычисление текущих координат точки контура первого тела в системе координат, связанной со вторым телом. Алгоритм работы преобразователя 5 непосредственно следует иэ блок-схемы (Ф т.4), реализующей зависимости (13) и (14), Процессы формирования и преобразования координат осуществляются непрерывно. При этом координаты точек контуров тел формируются последовательно в направлении; корма - левый борт - нос - правый борт - корма - , и т.д .Задатчики координат 4,6 и 7,9 непрерывно формируют текущие значения координат точек контуров первого и второго тех Х, Х, ,.40За первую половину цикла идентифицируются точки. контура левого борта в направлении от кормы к носу, а затем (за вторую половину цикла) идентифицируются точки контура правого 45 борта в направлении от носа к корме. Такое направление обегания контуров (по ходу часовой стрелки) сохраняется и в дальнейшем для последующих циклов. Координаты Х, У точек конту ра первого тела подаются на входы преобразователя 5 и на входы блоков 12 и 13 памяти, а координаты точек контура второго тела подаются на входы компараторов 8 и 10 и на входы блоков 16 и 17 памяти, Преобразователь 5 по значениям Х, У, характеризующим текущее положение точки на контуре первого тела, а также по эначениям Х , У Х, У,ф, характеризующим пространственное положение тел, вычисляет текущие координатыточек контура первого тела в системе координат, связанного со вторым телом. Вычисленные значения координатподаются на входы компараторов 8 и 10 соответственно. В идеальном случае в момент удара координатысформированные задатчиками 7 и 9, и координаты, вычисленные преобразователем 5, будут совпадать с коордиатами точки соприкасания тел.На выходах блока 1 формируется одиночная серия последовательных им. пульсов О, К, О. Импульсом П останавливается процесс решения дифференциальных уравнений, описывающих движения первого и второго тел. При этом суммирующие интеграторы 2.4, 2,5, 2.6 и суммирующие интеграторы 14.4, 14,5, 14.6, входящие в состав блоков 2 и 14 моделирования движения тел, переводятся из режима "Интегрирование" в режим "Слежение". Блоки 12, 13, 6, 17 памяти по сигналу И запоминают мгновенные значения текущих координат точек контуров тел Х, У, , , а интеграторы 3.1, 3.2, 3.3 вычислителя 3 и 15.1, 15.2, 15,3 вычислителя 15 иэ режима "Слежение" переводятся в рекмм Запоминание" и запоминают значения величины Х , У 4), и Х, У, (, имеющихся на данный момент на выходах интеграторов 2.4, 2.5, 2,6 и 14.4, 14.5, 14.6. Значения величин Х, У, , , запомненные блоками 2, 13, 16, 1 памяти соответствуют точке соприкасания тел. Вычислители 3 и 15 послеударных состояний тел в соответствии с соотношениями (3) - (12) и (15) - (22) определяют послеударные состояния тел, характеризуемые величинами Х , У, (, для первого тела и величинами Х , У,(1для второго тела, Блок-схема, реализующая алгоритм вычисления (3) - (12), приведена на фиг.3, а блок-схема, реализующая алгоритм вычисления (15)- (22), приведена на фиг.5, После вычисления величин Х 1, У, (/, , иу , ( , а также после установки последних в качестве начальных условий интеграторов 2.4, 2.5, 2.6, и 14.4, 14.5, 14.6 блоков 2 и 14 моделирования движения, сигналом К блока 1 блоки 12, 13, 16, 17 памятии ин теграторы 3.1, 3.2, 3.3 и 15,1, 15.2,5.3 вычислителей 3 и 15 послеударного состояния тел возвращаются в режим "Слежение", а суммирующие интеграторы 2.4, 2.5, 26 и 14,4, 14.5, 14.6 блоков 2 и 14 моделирования движения тел - в режим "Интегрирование". С некоторым интервалом сигналом О блока 1 осуществляется "Пуск" интеграторов 2.4, 2,5, 2.6 и 14.4, 14.5, О 14.6 блоков 3 и 4. Моделирование движения тел теперь уже производится при новых начальных условиях, равных вычисленным величинам Х , У фи1 Кф 1 К ф 1 К Х 2 У, (/, которые отличаются 15 от их доударцых значений, В этом и заключается суть моделирования ударного эффекта. Дальнейшее движение тел определяется действующими на нцх силами и моментами. 20В случае моделирования удара о неподвижную преграду блоки 14, 15, 16, 17 от остальных блоков отключаются,Формула изобретенияУстройство для моделирования удара твердых тел по авт.св, 9 1381341, о т л и ч а ю щ е е с я тем, что, с целью расширения функциональных возможностей, оно снабжено третьим и 30 четвертым блоками памяти, блоком моделирования движения второго тела и вторым вычислителем послеударного состояния, выполненным в виде трех интегрирующих усилителей, девяти суммирующих усилителей, двух дифферецциаторов, блока деления, формирователя функций арктангенса, синуса и косинуса, шести умножителей, операционного усилителя, двух источников опор ных напряжений, двух делителей и квадратора, первые входы интегрирующих усилителей соединены с первым, вторым и третьим информационными входами вычислителя соответственно, вто рые входы соответственно соединены с первым и вторым управляющими входами вычислителя, а выходы соединены с первыми входами первых трех суммирующих усилителей, вторые входы которых 50 подключены к выходам первого, второго и третьего умножителей, а выходы являются первым, вторым и третьим выходами вычислителя, входы дифференциаторов соединены с четвертым и пятым 55 информационными входами вычислителя а его выходы подключены к входам блока деления, выход которого соединен с входом формирователя функции арктацгенса, к выходу котрого подключе-.ны входы формирователей функции косинуса и синуса, входы четвертого суммирующего усилител 1 соединены с входом первого диффсренциатора и первымисточником опорного напряжения, а выход - с первым входом четвертого умножителя, второй вход которого подключен к выходу формирователя функциикосинуса, а выход - к первому входупятого суммирующего усилителя, входыкоторого соединены с входом второгодифференциатора и с выходом формирователя функции синуса, первый входпервого умножителя соединен с одиннадцатым информационным входом вычислителя, а второй вход - с выходомпервого операционного усилителя, входкоторого соединен с выходом шестогоумножителя и первым входом второгоумножителя, второй вход которого соединен с десятым входом вычислителя,первые входы третьего ц шестого умножителей подключены к девятому информационному входу вычислителя, а вторые входы соединены с выходами делителей, первые входы которых соединены с выходом шестого суммирующегоусилителя, первый вход которого подключен к второму цсточцику опорногонапряжения и к второму входу второгоделителя, а второй вход - к выходуквадратора, вход которого соединен свыходами пятого суммирующего усилителя, и с вторым входом первого делителя, первые входы седьмого, восьмогои девятого суммирующих усилителей со-.единены с первыми входами трех интегрирующих усилителей, вторые входы являются шестым, седьмым и восьмым информационными входами вычислителя, авыходы - его информационными выходами, а блок моделирования движениявторого тела выполнен в виде двухпервых управляющих входов, подключенных к первым двум выходам блока синхронизации и к управляющим входамвторого вычислителя послеударного состояния и третьего н четвертого блоков памяти, третьего управляющеговхода, подключенного к третьему выходу блока синхронизации, трех информационных входов, соединенных с выходами второго вычислителя послеударного состояния, первых трех информационных выходов, соединенных с его первыми тремя информационными входами,а остальные его выходы соединены сше с тым, седьмым и в ос ьмым входами преобразователя каординатконтура тела,информационные входы третьего и четвертого блоков памяти соединены с выходами третьего и четвертого задатчиковтекущих координат контура второго тела, а выходы - с четвертым и пятыминформацион,ыми входами второго вычислителя послеударного состояния,первые три информационные выхода которого соединены с седьмым, восьмыми девятым информационными входамипервого вычислителя послеударного состояния, а шестой, седьмой, восьмой,девятый, десятый и одиннадцатый информационные входы - с первыми шестьюинформационными выходами первого вьгчислителя послеударного состояния.11567889 Составитель В,ИоноваТехред М.Ходанич Корректор Н,Ревская Редактор Л.Долинич Заказ 135 Тираж 557 одписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб., д, 4/5
СмотретьЗаявка
4376476, 08.02.1988
ОПЫТНОЕ КОНСТРУКТОРСКО-ТЕХНОЛОГИЧЕСКОЕ БЮРО С ОПЫТНЫМ ПРОИЗВОДСТВОМ ИНСТИТУТА МЕТАЛЛОФИЗИКИ АН УССР
СПИЧЕК ЮРИЙ НЕСТЕРОВИЧ, КРИВОНОСОВ ВИКТОР БОРИСОВИЧ, ФИЛИППОВ ВАЛЕРИЙ ИВАНОВИЧ
МПК / Метки
МПК: G06G 7/48
Метки: моделирования, твердых, тел, удара
Опубликовано: 30.05.1990
Код ссылки
<a href="https://patents.su/8-1567889-ustrojjstvo-dlya-modelirovaniya-udara-tverdykh-tel.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для моделирования удара твердых тел</a>
Устройство для моделирования двухканальной системы массового обслуживания

Номер патента: 1242983
Опубликовано: 07.07.1986
Авторы: Борицкий, Добычина, Крылов, Курковский
МПК: G06N 7/08
Метки: двухканальной, массового, моделирования, обслуживания, системы
...условия - число К.Имнульсы с выхода элемента И 4(заявки, принятые в очередь к первому каналу) и с выхода одновибратора 20 (заявки, обслуженные вторымканалом) через элемент ИЛИ 8 и блок14 синхронизации поступают на суммирующий вход счетчика 15. Импульсы свыхода элемента И 5 (заявки, принятые в очередь по второму каналу)и с выхода одновибратора 19 (заявки,обслуженные первым каналом) черезэлемент ИЛИ 9 и блок 14 поступают на.вычитающий вход. Записанное в счетчике 15 число 1 определяется по формуле: 1 2 Р 2 ( 4 Ф30где п 1, и ш, - число заявок, принятых в очередь к первому и второму каналамобслуживания СМО,р р, - число заявок, обслу 35женных первым и вторымканалами;- число, записанное всчетчик перед началомработы...
Устройство для моделирования сетевого графика

Номер патента: 424182
Опубликовано: 15.04.1974
Авторы: Волошин, Горшкова, Хусид
МПК: G06G 7/48
Метки: графика, моделирования, сетевого
...работ в зависимости от режима работы, задаваемого специальным устройством управления.В устройстве, кроме того, содержится блок управления 11, имеющий Ю выходов 12, каждыи из которых соответствует номеру модели работ в сетевом графике, и выход 13, включающий режим определения вероятности заданного пути сетевого графика. Ьлок моделирования работ состоит из 1 Ч моделей работ 14, соединенных между собой в соответствии с топологией сети посредством наборного поля (на чертеже не показано). Задатчик вероятностей 15 предназначен для задания вероятности выполнения данной работы, Первая схема И 16 предназначена для выработки сигнала передачи информации с задатчика вероятностеи 15 для работ, лежащих на критическом пути, вторая схема И 17...
Устройство для моделирования судовой газотурбинной установки

Номер патента: 938290
Опубликовано: 23.06.1982
Авторы: Берденников, Кабин, Шраер
МПК: G06G 7/48
Метки: газотурбинной, моделирования, судовой, установки
...перемещений реверсных органов. Выход функционального преобразователя 18 электрически связан с входом сумматора 27 через последовательно включенные квадратор 24 и усилитопь 21, а также - с первым входом блока перемножения 31, второй вход которого электрически связан с выходом интегратора 33, Выход сумматора 27 электрически связан с первым входом блока перемножения 32, второй вход которого связан с блоком 34, а его выход элмтрически связан с первым входом сумматора 28, второй вход которого связан с выходом блока перемножения 30, а тре,преобразователя 18 вычисляется величина ( 1 к. й ), В масштабном усилителе 36 эта величина умножается на постоянный коэфющнент с 1 . В масштабном усилителе 37 сигнал МЗХ М умножается на постоянный...
Устройство для моделирования систем массового обслуживания

Номер патента: 1383382
Опубликовано: 23.03.1988
Автор: Ярмыш
МПК: G06N 1/00
Метки: массового, моделирования, обслуживания, систем
...счетчике 5 первой фазы запоминается единица, С выхода первого элемента И 11 сигнал поступает на управляющий вход элемента И 7 первого канала, который срабатывает и включает генератор 4 обслуженных заявок первого канала, на выходе которого появляется импульс в соответствии с законом распределения времени обслуживания заявки в первом канале. Этот импульс поступает на второй вход блока 6, где он, аналогично описанному, обнуляет первый элемент 14 задержки, и триггер 22 переводит кольцевой регистр 18 в следующее положение, а потециал с первого входа элемента И 21 снимается. Одновременно импульс с выхода второго генератора 4 поступает через элемент ИЛИ 9, на вход вычитания счетчика 5 и на вход соответствующего счетчика 13, где регистрируются...
Устройство для моделирования задач оптимального управления
Номер патента: 507876
Опубликовано: 25.03.1976
Автор: Башков
МПК: G06G 7/48
Метки: задач, моделирования, оптимального
...6 через блок 8 посту 2 Ь пает на блок 2. С дискретного вычислительного блока 13 через блок 16 на блохи 1-4посылается сигнал о том что итерция выполняется во времени вперед и схемы этихблоков автоматически преобразуются" далее,30 аналогичным путем, на блоки 2 и 4 посылается сигнал пуска и начинается нулеваяитерация, которая длится до тех пор, покавычисляемое в блоке 9 скалярное произведение вектора невязок; постуающего с блока. ффЗф 5 и вычисляемого как разность между текушими координатами объекта и заданным конечным состоянием на вектор сопряженныхФпеременных, поступающий с блока 2, не станет равно нулю, В этот момент компаратор40 11 посылает сигнал на дискретный вичислительный блок 13, который через блок 16выдает сигналы; на блоки 2 и...
Предыдущий патент: Оптико-электронное углоизмерительное устройство
Следующий патент: Устройство для измерения резкости
Случайный патент: Способ проверки герметичности мембранного оксигенатора