Программно-управляемый модуль
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
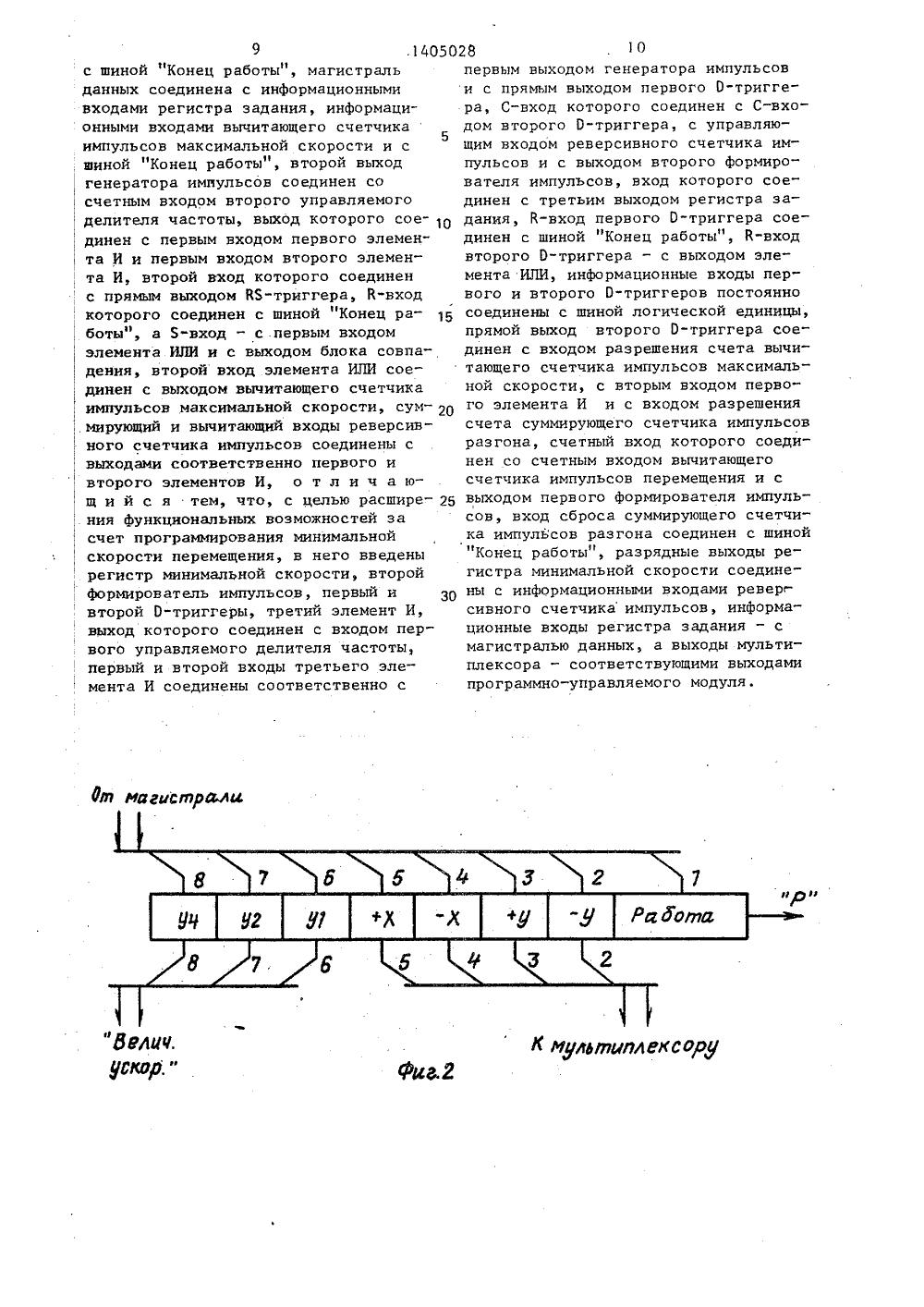
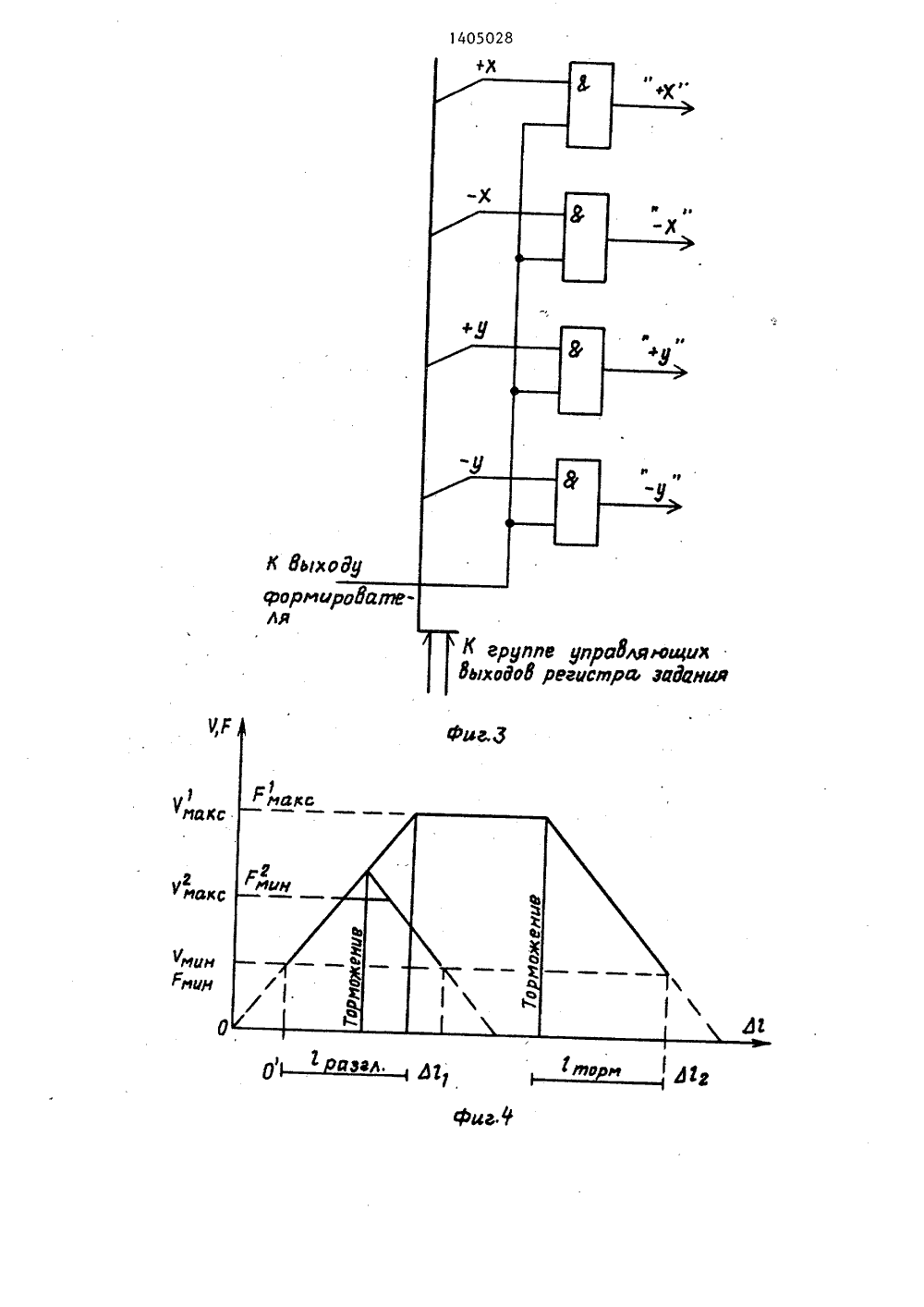
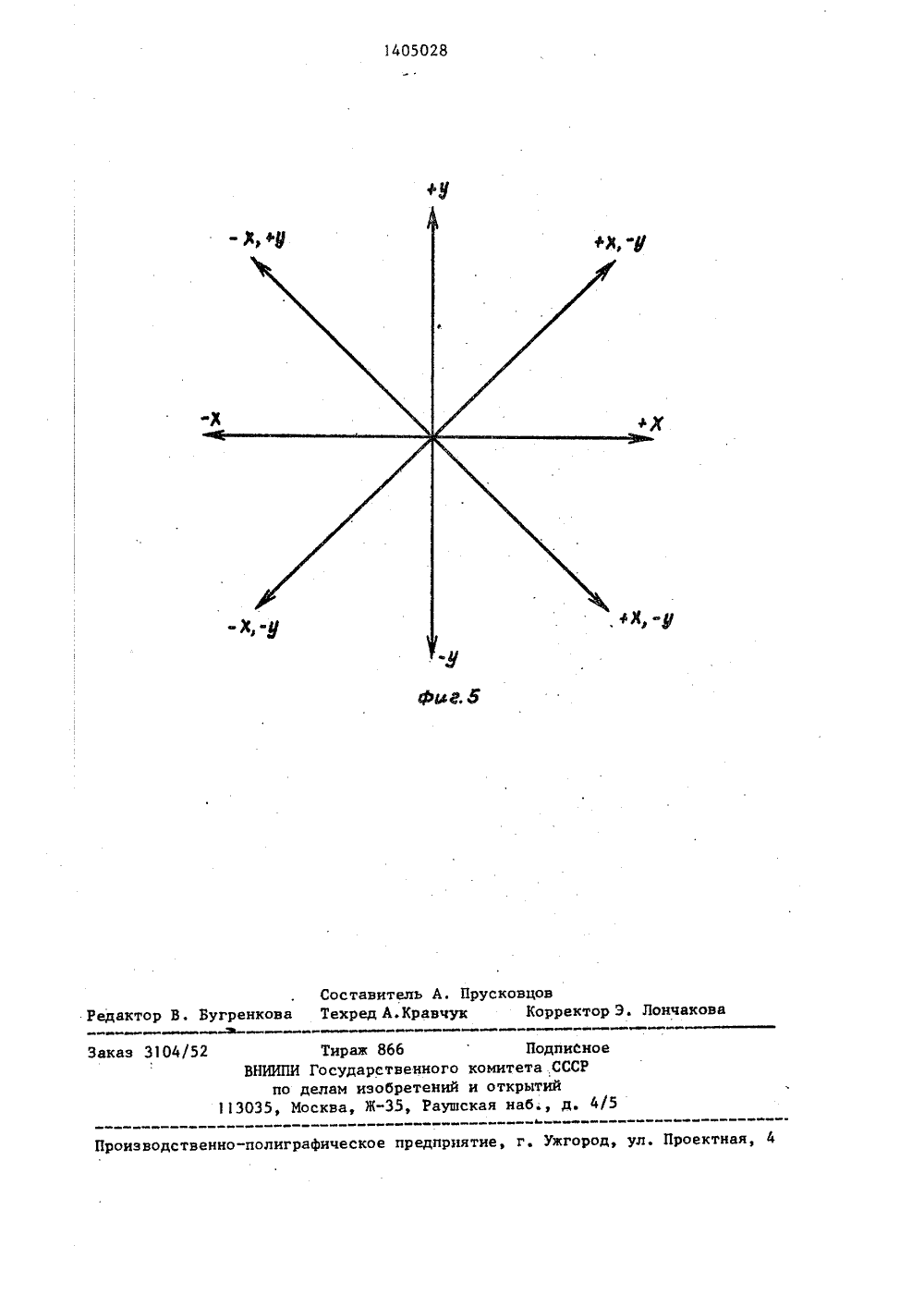
3 СОВЕТСКИХАЛИСТИЧЕСКИХУБЛИК 405028 51) 4 9 / 1 8 ВЕННЫЙ ИЗ ОБРЕ КОМИТЕТ СССРНИЙ И ОТКРЫТИЙ ГО ЕТЕНИЯ ТОР СНО ВИДЕТ ТВ миз5 ил ОПИСАНИЕ(56) Авторское свидетельство СССР У 1177795, кл . 6 05 В 19/18, 1984,Авторское свидетельство СССР У 1327066, кл. С 05 В 19/18, 1986. (54) ПРОГРАММНО-УПРАВЛЯЕМЫЙ МОДУЛЬ (57) Изобретение относится к области автоматики и вычислительной техники и может быть использовано в магистрально-модульных системах программного управления электроприводом. Целью изобретения является расширение функциональных возможностей за счет программирования минимальной скорости перемещения. В состав программно-управляемого модуля входят генератор 1импульсов, первый и второй управляемые делители 2 и 3 частоты, регистр4 задания, реверсивный счетчик 5, суммирующий счетчик 6 разгона, вычитающий счетчик 7 перемещения, блок 8совпадения, первый формирователь 9,мультиплексор 10, первый и второй элементы И 11 и 12, К 5-триггер 13, элемент ИЛИ 14, вычитающий счетчик 15максимальной скорости, второй формирователь 17, первый и второй 0-триггеры 18 и 19, третий элемент И 20,Преимущество изобретения состоит в расширении функциональных возможнос стей и повышении производительности э управляемых автоматов за счет оптиинамических характеристик.40 Изобретение относится к автоматике и вычислительной технике и можетбыть использовано в магистрально-модульных системах программного управления электроприводом, например в5графопостроителях, координатных столах, автоматах с программным управлением или промышленных роботах.Цель изобретения - расширение функ Оциональных возможностей за счет программирования минимальной скорости перемещения,На фиг, 1 представлена структурнофункциональная схема модуля; на фиг.2 15структура регистра задания; на Фиг.3 -структурная схема мультиплексора; нафиг. 4 - график отработки заданногоперемещения; на фиг. 5-возможные направления перемещений в зависимостиот значений управляемых входом мультиплексора.Модуль (фиг. 1) содержит генератор1, первый и второй управляемые дели -тели 2 и 3 частоты, регистр 4 задания, реверсивный счетчик 5 импульсов,суммирующий счетчик 6 разгона, вычитающий счетчик 7 перемещения, блок 8совпадения, первый формирователь 9,мультиплексор 10, первый и второйэлементы И 11 и 12, РБ-триггер 13,элемент ИЛИ 14, вычитающий счетчик15 максимальной скорости, регистр 16минимальной скорости, второй формирователь 17, первый и второй 0-триггеры 18 и 19, а также третий элемент И 20,В качестве управляемых делителей2 и 3 частоты может быть применена, например, микросхема155 ИЕ 8 бК 0.348;006 ТУ 1, у которойкоэффициент деления зависит от кодана управляющих входах.В модуле "Разгон" может бытьтакже применена микросхема, например"Программируемый таймер" КР 580 ВИ 53,причем на одной такой микросхеме можно одновременно реализовать вычитающий счетчик 15, максимальной скорости,вычитающий счетчик 7 перемещения ипервый формирователь 9. При этом до Ополнительно расширяются функциональные возможности модуля "Разгон",так как указанная микросхема позволяет хранить первоначально занесенныекоды. Следовательно, отпадает необходимость задания величины максимальнойскорости и величины перемещения в начале каждого цикла перемещения, например, значение величин максимальнойи минимальной скоростей перемещенияможет быть задано один раз в началеработы, что повышает быстродействие модуля "Разгон".Генератор 1 вырабатывает постоянную частоту, причем его первый выходявляется выходом опорной частоты,которая преобразуется первым управляемым делителем 2 частоты в выходную частоту, а его второй выход являетсявыходом частоты разгона-торможения,которая преобразуется вторым управля -емым делителем 3 частоты в частотусчета реверсивного счетчика 5 импульсов, которая характеризует величину ускорения разгона-торможения. Регистр4 задания принимает с магистрали данных и хранит код величины ускоренияразгона-торможения, определяющий коэффициент деления второго управляемого делителя 3 частоты, а также значения управляющих сигналов х, -х, у, -у для мультиплексора 10 и признак "работа", определяющий состояние шины"Разрешение разгона", Реверсивный счетчик 5 импульсов суммирует импульсы частоты разгона-торможения при разгоне и вычитает при торможении, его разрядные выходы определяют коэффициент деления первого управляемого делителя 2 частоты.Суммирующий счетчик 6 разгона ведет подсчет импульсов разгона, а вычитающий счетчик 7 перемещения вычитает каждый импульс выходной частоты из величины заданного перемещения, причем его нулевой выход свидетельствует об окончании отработки заданного перемещения. Блок 8 совпадения определяет момент начала торможения путем сравнивания текущего кода вычитающего счетчика 7 перемещения с числом импульсов разгона суммирующего счетчика 6 разгона, а первый Формирователь 9 формирует выходные импульсы с заданными параметрами, например длительностью.Мультиплексор 1 О в зависимости от значений управляющих входов выдает импульсы выходной частоты на один из выходов х, -х, у, -у или на одну изпар выходов (+х, +у), (х, -у), (-х, -У), (-х, у), Первый и второй элементы И 11 и 12 разрешают счет реверсивного счетчика 5 импульсов соответственно при разгоне или торможении. В 5-триггер 13 управляет разрешением3140торможения, а элемент ИЛИ 14 сбрасы-вает первый 0-триггер 18, управляющий разрешением разгона, тем самымзапрещая разгон. Вычитающий счетчик15 максимальной скорости вычитаеткаждый импульс частоты разгона-торможения из кода, соответствующегомаксимальной величине скорости, и егонулевой выход свидетельствует о достижении максимальной величины скорости.Регистр 16 минимальной скоростихранит значение кода, соответствующее минимальной скорости перемещения,а также передает это значение на реверсивный счетчик 5 импульсов. Второй0-триггер 19 управляет разрешениемперемещения, т.е, разрешением прохождения через третий элемент И 20 импульсов опорной частоты на тактовыйвход первого управляемого делителя 2частоты при выдаче признака отработки заданного перемещения вторым формирователем 17.Модуль работает следующим образом,Перед началом работы модуль фиг.1)устанавливается в исходное состояние(например, командами Е и С при выполнении модуля в стандарте КАМАК) .В начале цикла из магистрали данных заполняется, регистр 4 заданияфиг. 2), куда заносятся код величины ускорения разгона-торможения,значения управляющих входом мультиплексора 10 фиг. 3) в зависимостиот требуемого направления перемещения и признак "Работа", являющийсяпуском модуля, а также заносится кодвеличины требуемого перемещения ввычитающий счетчик 7 перемещения,код величины максимальной скоростиперемещения в вычитающий счетчик 15максимальной скорости и код величины,максимальной скорости перемещения врегистр 16 минимальной скорости.Занесение информации в регистр 4задания должно производиться послезанесения информации в счетчики 7 и15, и регистр 16, так как с появлени-мем "1" в разряде "Работа" происходитпуск модуля.В первоначальный момент, до установления в "1", признака "Работа" врегистре 4 задания, выходы триггеров13, 18 и 19 установлены в "0" и, таким образом, запрещают передачу имтпульсов соответственно на вычиФающий5028 10 15 и Г,-2" 35 40 45 50 55 20 25 30 вход реверсивного счетчика 5, суммирующий вход реверсивного счетчика 5 и на вход первого управляемого делителя 2 частоты.На тактовые входы первого и второго управляемых делителей 2 и 3 частоты подается соответственно опорная частота Г, через третий элемент И 19(максимально допустимая частота на выходе модуля) и частота разгона- торможения Г (максимально допустимая частота разгона модуля).Выходные частоты Г и Г, являются независимыми, поскольку обеспечивают независимые параметры: Г - скорость перемещения электропривода, Г, - величину ускорения при разгоне-торможении. При этом частота Г выбирается по максимально допустимой скорости перемещения электропривода и равна максимально допустимой частоте на координатных выходах модуля, а Г, по максимально допустимой величине ускорения разгона-торможения.Частота импульсов на выходах управляемых делителей частоты определяется коэффициентом деления - кодом, поступающим на их управляющие входы. Частота импульсов Г на выходе второго управляемого делителя 3 частоты где и - код, соответствующий заданному ускорению разгона-торможения,поступающий из регистра 4 заданияна управляющие входы делителя 3 частоты. Импульсы с постоянной частотой Е, соответствующей заданному ускорению, поступают на первые входы элементов И 11 и 12, При установлении признака "Работа" регистра 4 задания в "1" второй формирователь 17 формирует фкороткий импульс, который перезаписывает значение минимальной скоростиперемещения из регистра 16 минимальной скорости в реверсивный счетчик 5.По заднему фронту этого импульса происходит установка триггеров 18 и 9в "1". Эти триггеры открывают соответственно первый элемент И 11 и третий элемент И 20. Частота, соответствующая коду величины ускорения разгона-торможения, т.е. коэффициентуделения второго управляемого делителя 3 частоть 1, подается на суммирующий5 1405028 вход реверсивного счетчика 5 импульсов. Импульсы на суммирующий вход реверсивного счетчика 5 поступают до тех пор, пока из элемента ИЛИ 14 не Поступит сигнал сброса разрешения разгона, т,е. сброса триггера 18. триггер 18 также разрешает счет сумирующему счетчику 6 разгона и вычиающему счетчику 15 максимальной корости. Таким образом, в суммируюем счетчике 6 разгона хранится инормация о количестве импульсов, потупивших на выход модуля за время азгона.Одновременно с заполнением реверивного счетчика 5 происходит вычиание с этой же частотой вычитающего четчика 15 максимальной скорости, а акже происходит заполнение суммируюего счетчика 6 разгона и вычитание четчика 7 перемещения выходной часотой Г , первого управляемого деителя 2 частоты, на управляющие вхоы которого поступает текущий код исла Й реверсивного счетчика 5 им - ульсов. Следовательно, частота Рь зменяется пропорционально числу Й:Н Г л К щения. 50 55 Йри этом траектории разгона и торможения максимально приближены к есТественным траекториям разгона иторможения электроприводов, обеспечиая тем самым оптимальность управлеия.Импульсы выходной частоты Г ,формируются первым формирователем 9импульсов, с выхода которого с заданной длительностью, например 0,5 мкс,поступают на вход мультиплексора 1011 фиг. 3). Сформированные импульсывыходной частоты коммутируются вмультиплексоре 10 в соответствии созначениями управляющих входов, определяемых регистром 4 задания (фиг,2),Цри этом перемещение задается по одвому из восьми возможных направлений(фиг. 5),При достижении максимальной скорости Ч(задано перемещение 61(фиг. 4) или при сравнении кодов счетчиков 6 и 7 - перемещение Ь 1 чтосвидетельствует об отработке на разгоне половины заданной величины перемещения, а вторая половина должнабыть отработана с торможением, сбрасЬвается в нОн триггер 18 разрешения 5 10 15 20 75 30 35 40 разгона, элемент И 11 закрывается изаполнение реверсивного счетчика 5импульсов прекращается. Далее, еслизапрет разгона был вызван достижениеммаксимальной скорости, о чем свидетельствует импульс на нулевом выходевычитающего счетчика 15 максимальнойскорости, содержащего в данный моменткод "0, перемещение осуществляетсяс постоянной скоростью Ч, до появления сигнала на выходе 8 совпадения, Максимальной скорости перемещения соответствует максимальное значение кода Й с в реверсивном счетчи -ке 5 импульсов,.причем во время разгона до максимальной скорости код навыходе счетчика 5 изменяется от Имандо Мпо линейному закону, Еслизапрет разгона вызван отработкой половины заданного перемещения на разгоне, то сигнал "Больше или равнос выхода блока 8 совпадения запрещает разгон путем сброса триггера 18разрешения разгона через элемент ИЛИ14 и устанавливает триггер 13 разрешения торможения в единичное состояние, который через элемент И 12 разрешает вычитание реверсивного счетчика 5 импульсов и перемещение происходит с торможением, При этом импульсы с частотой Г через элементИ 12 поступают на вычитающий входреверсивного счетчика 5 импульсов,код которого Н линейно уменьшается,уменьшая пропорционально частоту Г ,.Если количество импульсов заданногоперемещения в счетчике 7 перемещения(при заданном перемещении Ъ 1 фиг.4)четное, то блок 8 совпадения выдаетсигнал при равенстве кодов счетчикаб разгона и счетчика 7 перемещения,если количество импульсов нечетное,то блок 8 совпадения выдает сигнал,когда код в счетчике б разгона на"1" больше кода в счетчике 7 перемеПри обработке заданного перемещения с достижением максимальной скорости блок 8 совпадения выдает сигнал, свидетельствующий, что оставшиеся импульсы заданного перемещения (хранящиеся в счетчике 7) должны быть отработаны с торможением, При этом обеспечивается отработка равного числа импульсов на разгоне и торможении,поскольку в счетчике б зафиксированочисло импульсов, отработанных в режи1405028 8ного перемещения является также последним импульсом торможения,Известный программно-управляемыймодуль характеризуется невозможностью программирования величины минимальной скорости перемещения, чем и.объясняется его функциональная ограс ниченность.Согласно приведенному анализу ирасчету получены ориентировочныеданные по достигаемому эффекту прииспользовании программно-управляемого модуля: функциональное расширение модуля примерно на 253 вследствие возможности программирования величины максимальной скорости перемещения; повышение производительностиуправляемых автоматов примерно на207 за счет возможности оптимизациидинамических характеристик, в томчисле величины минимальной скоростиперемещения.Перечисленные преимущества обес 25 печивают повышение эффективности магистрально-модульных систем программного управления электроприводом,например, в графопостроителях, координатных столах, станках с программным управлением или промышленных роботах, а также функционирования оборудования с программным управлениеми вычислительной техники в целом. ме раз гона (до дос тижения мак симальной скорости).Торможение прекращается при окончании отработки модулем заданного перемещения, о чем свидетельствует импульс на нулевом выходе вычитающегосчетчика 7 перемещения, содержащегов данный момент код "0. Этот импульсбрасывает также суммирующий счетчик6 разгона, триггер 13 размещения торможенияи триггер 19 размещения перемещения в "0", запрещая торможениеи .блокируя через элемент И 20 подачуимпульсов частоты Г на первый управляемый делитель 2 частоты, тем самыми частоты Г на выходах модуля.ььцЭтот импульс является сигналом запроса, подтверждающего готовность модуля к отработке следующего цикла, ипоступает в магистраль данных. Такзаканчивается цикл отработки модулемзаданного перемещения,В результате модуль находится вследующем состоянии: суммирующийсчетчик 6 разгона и вычитающий счетчик 15 максимальной скорости сброшены в "О", триггеры 13, 18 и 19, разрешающие режимы работы модуля, - пОСостояние реверсивного счетчика 5безразлично, так как в начале каждого цикла происходит перезапись содержимого регистра 16 минимальнойскорости в этот счетчик,Таким образом, модуль готовит кприему нового задания на перемещение.Задавая в регистр 16 минимальной скорости различные коды скорости, можноменять скорость, с которой начинает,ся отработка двигателем заданной ве 40личины перемещения, т.е, можно производить оптимизацию динамических харектеристик управляемых электромеханических приводов.Из приведенного описания работымодуля следует, что по сравнению с45известными модулем предлагаемый реализует принципиально новый способорганизации перемещения электропривода с разгоном и торможением, вкотором наряду с возможностью про-.граммного управления величинами ускорения разгона-торможения, максимальной и минимальной скоростей перемещения, автоматически определяется момент начала торможения на основе контроля унитарного кода, которыйформируется с выходной частотой модуля, причем последний импульс заданформула изобретения Программно-управляемый модуль, содержащий генератор импульсов 1 первый и второй элементы И, й 5-триггер, магистраль данных, элемент ИЛИ, первый управляемый делитель частоты, управляющие входы котороГо соединены с разрядными выходами реверсивного счетчика импульсов, второй управляемый делитель частоты, управляющие входы которого соединены с первыми управляющими выходами регистра задания, вторые управляющие выходы которого соединены с управляющими входами мультиплексора, тактовый вход которого соединен с выходом первого формирователя импульсов, первые и вторые информационные входы блока совпадения соединены соответственно с информационными выходами суммирующего счетчика импульсов разгона и вычитающего счетчика импульсов перемещения, выход нуля вычитающего счет" чика импульсов перемещения соединенв магистрали Ввлич. УсюрРуювипдексору 9 .14050 с шиной "Конец работы", магистраль данных соединена с информационными входами регистра задания, информационными входами вычитающего счетчика5 импульсов максимальной скорости и с шиной "Конец работы", второй выходгенератора имнульсов соединен со; счетным входом второго управляемогоделителя частоты, выход которого сое , динен с первым входом первого элемен-та И и первым входом второго элемента И, второй вход которого соединен с прямым выходом Р 5-триггера, Р"вход которого соединен с шиной "Конец работы", а 5"вход - с .первым входом элемента ИЛИ и с выходом блока совпадения, второй вход элемента ИЛИ сое"динен с выходом вычитающего счетчика импульсов максимальной скорости, сум .мирующий и вычитающий входы реверсивного счетчика импульсов соединены с выходами соответственно первого и второго элементов И, о т л и ч а ющ и й с я тем, что, с целью расшире Б ния функциональных возможностей за счет программирования минимальной скорости перемещения, в него введены регистр минимальной скорости, второй формирователь импульсов, первый и второй Р-триггеры, третий элемент И, выход которого соединен с входом первого управляемого делителя частоты, первый и второй входы третьего элемента И соединены соответственно с 28 10первым выходом генератора импульсови с прямым выходом первого 0-триггера, С-вход которого соединен с С-входом второго О-триггера, с управляющим входом реверсивного счетчика импульсов и с выходом второго формирователя импульсов, вход которого соединен с третьим выходом регистра задания, Р-вход первого 0-триггера соединен с шиной "Конец работы", Р"входвторого Р-триггера - с выходом элемента ИЛИ, информационные входы первого и второго 0-триггеров постоянносоединены с шиной логической единицы,прямой выход второго 0-триггера соединен с входом разрешения счета вычитающего счетчика импульсов максимальной скорости, с вторым входом первого элемента И и с входом разрешениясчета суммирующего счетчика импульсовразгона, счетный вход которого соединен со счетным входом вычитающегосчетчика импульсов перемещения и свыходом первого формирователя импульсов, вход сброса суммирующего счетчика импульсов разгона соединен с шиной"Конец работы", разрядные выходы регистра минимальной скорости соединены с информационными входами ревер.сивного счетчикаимпульсов, информационные входы регистра задания - смагистралью данных, а выходы мультиплексора - соответствующими выходамипрограммно-управляемого модуля.1405028 тав чакова Заказ 3104/52 Тираж 866 Подписано ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 035, Москва, Ж, Раушская наб., д. 4
СмотретьЗаявка
4100256, 04.08.1986
ПРЕДПРИЯТИЕ ПЯ Р-6668
ЦЫМБАЛ ВАЛЕРИЙ НИКОЛАЕВИЧ, ЯНОВСКИЙ ВАСИЛИЙ НИКОЛАЕВИЧ
МПК / Метки
МПК: G05B 19/18, G05B 19/418
Метки: модуль, программно-управляемый
Опубликовано: 23.06.1988
Код ссылки
<a href="https://patents.su/8-1405028-programmno-upravlyaemyjj-modul.html" target="_blank" rel="follow" title="База патентов СССР">Программно-управляемый модуль</a>
Генератор импульсов с управляемой частотой следования

Номер патента: 519842
Опубликовано: 30.06.1976
Автор: Цыбулькин
МПК: H03K 1/16
Метки: генератор, импульсов, следования, управляемой, частотой
...3 поступают на вход счетчика б, а импульсы переполнения счетчика 6 поступают на входы элементов сов 5 10 15 20 25 30 35 падения 12 и 13. Кроме того, импульсы переполнения счетчика 6 производят перезапись содержимого регистра 16 в счетчик б.Пусть подана команда Разгон. При этом триггер 9 устанавливается в положение 1, и на его единичном выходе появляется разрешающий потенциал. Пусть в регистр 10 занесено число, соответствующее заданной частоте на выходе 18 генератора (например, все единицы, что соответствует максимальной частоте). В момент установления в регистре 10 числа, отличного от нуля (в нашем случае все единицы), на выходе элемента сравнения 11 возникает разрешающий потенциал. Тогда первый импульс переполнения счетчика б...
Формирователь пачек импульсов с изменяющейся частотой следования импульсов в пачке

Номер патента: 1451842
Опубликовано: 15.01.1989
МПК: H03K 3/84, H03K 5/156
Метки: изменяющейся, импульсов, пачек, пачке, следования, формирователь, частотой
...12, Через некоторое время на выходе элемента 8 задержки появляется уровень "О , который закрывает элемент И 12. Через некоторое время на . выходе элемента 8 задержки появляет-, ся уровень О, который закрывает элемент И 12. Полученные положительные импульсы с выходов элементов И 11, 12 через элемент ИЛИ 13 поступают на выход формирователя 7 импульсов.Формирователь пачек импульсов с изменяющейся частотой следований импульсов в пачке работает следующимобразом.В исходном состоянии, до момента появления импульсов эталонной частоты, на разрядных выходах счетчика- регистра 1 памяти установлен логический "О", а на выходах счетчика- регистра 2 - логическая "1". Счетчики-регистры 1, 2 памяти работают в режиме слежения. На счетный вход...
Устройство для формирования импульсов с изменяющейся частотой следования

Номер патента: 1275740
Опубликовано: 07.12.1986
Автор: Дорух
МПК: H03K 3/72
Метки: изменяющейся, импульсов, следования, формирования, частотой
...что приводит к изменению частоты импульсов на выходахУДЧ 1 и 2, причем частота импульсовна выходе УДЧ 1 увеличивается по линейному закону,Действительно, для обеспечения роста частоты импульсов на выходе УДЧ 1по линейному законуЕ ,с) = + а (3)где- текущее время;Е (С) - частота импульсов на выходеУДЧ 1,коэффициент Б (с) деления УДЧ 1 должен изменяться по гиперболическомузакону=--- . (4) Го н + При изменении й, (с) по закону (3) коэффициент Б деления УДЧ 2 изменяется по закону11, (С) = Б, +Е (Е)с 1 т.С учетом уравнений (2) и (3) можно записать1 т(") = /2 + н + 4" /2Частота Г (с) импульсов на входе счетчика 6 с учетом коэффициента де- ления делителя 10 частоты определяется следующим образом:Г Го10 записатьн (е) = -"- - й с + дй -Ез 2 дЕ н...
Устройство для формирования импульсов с изменяющейся частотой следования

Номер патента: 1431040
Опубликовано: 15.10.1988
Авторы: Дорух, Маргелов, Сакович
МПК: H03K 3/72
Метки: изменяющейся, импульсов, следования, формирования, частотой
...импульсы с частотами,определяемыми числами записаннымив СФКУ 11 - 14,Импульсы с выхода УДЧ 1 поступают на первый выход устройства, на счетный вход УДЧ 5, на входы прямого счета СФКУ 12 и 13 и на вход делителя 7, а импульсы с выхода УДЧ 2 через делитель 8 - на вход обратного счета СФКУ 11. С каждым импульсом на входах СФКУ 11 и 12 коды управления на выходах их разрядов изменяются на единицу, В соответствии с изменением этих кодов изменяются и коэффициенты деления УДЧ 1 и 2, коэффициент деления УДЧ 1 уменьшается, а коэффициент деления УДЧ 2 1 величивается. Это приводит к изменению частоты импульсов УДЧ 1 и 2, причем частота импульсов на выходе УДЧ 1 увеличивается по линейному закону,Действительно, для обеспечения роста частоты...
Устройство для формирования импульсов с изменяющейся частотой следования

Номер патента: 1431067
Опубликовано: 15.10.1988
Авторы: Дорух, Маргелов, Сакович
МПК: H03K 23/00, H03K 3/72
Метки: изменяющейся, импульсов, следования, формирования, частотой
...(с) деления УДЧ 3,7 и 8 составляет:М, =1,-Г (С) асРо г Родй- ЙСГ (Г + дйг) Ро Ро Роы - (и + ) н Гн+ дПолученное уравнение совпадает с уравнением (5). Следовательно, частота Гд(1) увеличивается во времени по линейному закону (4 ).На вход обратного счета СФКУ 9 поспоступают импульсы с шины 18, проходя предварительно делитель 14. С учетом коэффициента деления делителя 14 число И (1) СФКУ 9, а следовательно и коэффйциент деления УДЧ 1 определяется: и (е) = ю +г (г) оС учетом уравнений (2) и (4) можно записать: Частота Г, (1) импульсов на выходе УДЧ 1 и на счетном входе УДЧ 5 определяется: Импульсы с выхода УДЧ 1 поступают непосредственно на счетный вход УДЧ 5 и через делитель 16 - на вход прямого счета СФКУ 12. СФКУ 12 работает в режиме...
Предыдущий патент: Система автоматического управления для электроимпульсной установки
Следующий патент: Регулятор расхода
Случайный патент: Способ определения коррозионного состояния железобетонных подземных сооружений