Преобразователь линейных перемещений (его варианты)
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1285631
Автор: Демин








Текст
СОЮЭ СОВЕТСНИХ ЦИАЛИСТИЧЕСНИХ ЯО 1285631(59 4 Н 04 К ННЫЙ КОМИТЕТ СССРОБРЕТЕНИЙ И ОТНРЫТИЙ ОСУДАРС ПО ДЕЛА(57) Изобретениетострикционным прнейных перемещениипреобразованием.повьппение точност 21) 3857204/24-1022) 20. 02, 8546) 23. О 1. 87, Бюл. У 372) С. Б.Демин53) 534.232(088.8)56) Авторское свидетельство СССР668103, кл. Н 04 К 15/00, 1979.Авторское свидетельство СССР551806, кл. Н 04 К 15/00, 197. ЛИНЕЙНЫХ НЕРЕМЕ ВТОРСКОМУ СВИ Модулированный по цифровой сигнал о тносится к магниобразователям лис логометрическим ель изобретения - преобразования. частоте импульсный роса по выходу ге128563нератора 12 опроса поступает через преобразователь 9 на вход элемента 7 записи и возбуждает в магнитострик. циоином канале 2 (ИК) передачи ультразвуковые волны модулирующей частоты, распространяющиеся в обе стороны от источников сообщения. Распространяясь влево, волны рассеиваются на поглотителе 4. Распространяясь вправо по.МК 2, ультразвуковые волны достигают границ отражения, образованных ползуном 3 из магнитной жидкости, и 1отразившись, меняют направление хода.На выходах элемента 8 чтения формируются импульсы напряжения модулированной частоты вследствие обратногомагнитострикционного преобразования.По ним на выходах аналого-цифровогоформирователя 13 формируется сигналсинхронизации, записывающий цифровойкод в регистр 17. На выходе блока 21вычисления результата будет сформирован итоговый код результата преобразования. 1 с.п. ф-лы, 3 ил.Изобретение относится к техникеизмерений и контроля линейных переМещений, а именно к магнитострикционным преобразователям линейных перемещений с логометрическим преобразованием, и может быть использовано.всистемах автоматического управления.Цель изобретения - повышение точности преобразования.На фиг. 1 и 2 приведены варианты 10.устройства преобразования линейныхперемещений с односторонним и дифференциальным преобразованиями; нафиг,З - временная диаграмма,Преобразователь линейных перемещений (фиг.1 и 2) содержит магннтострикционный датчик 1 линейных перемещений, состоящий иэ магнитострикционного канала 2 передачи с магнитным ползуном 3 в его рабочей полости, 20акустического поглотителя 4, неподвижного и подвижного элементов 5 и бподмагиичивания, элементов 7 и 8 записи и чтения, преобразователя 9 напряжение - ток, избирательного усилителя 10 чтения, и аналого-цифровойканал 11 преобразования, состоящийиз генератора 12 опроса, аналогоцифрового формирователя 13 чтения,цифрового коммутатора 14, цифровогогенератора 15 взвешенных частот, первого, второго, третьего регистров 1618, первого и второго сумматоров 19и 20, блока 21 вычисления результата,.четвертого регистра 22, элемента 23 задержки, блока 24, синхронизации, блока25 контроля перемещения, первую ивторую входные шины 26 и 27 управления, первую выходную разрядную шину 28 данных, вторую выходную шину 29 стробирования, третью выходную разряд. ную шину 30 контроля перемещения. Кроме того, преобразователь (фиг,2) кроме указанных признаков содержит акустический поглотитель 31, элемент 32 подмагничивания с элементами 33 и 34 записи и чтения, преобразователь 35 напряжение - ток, избирательный усилитель Зб чтения, цифроаналоговый формирователь 37 чтения и цифровой компаратор 38.Устройство работает следующим образом.В первоначальный момент устройство (фиг.1) устанавливается в исходное состояние. Перевод устройства в режим работы осуществляется по цифровому управляющему сигналу, поступающему по первой входной шине 26 управления на вход его аналого-цифрового канала 11 преобразованияПо этому сигналу производятся разблокирование блока 24 синхронизации и запуск генератора 12 опроса и цифрового генератора 15 взвешенных частот. На и-разрядном выходе последнего формируется текущий цифровой код Х;, где- число тактов преобразования, представленных опорной высокостабильной сеткой разрядных частот длительностей Т - Т, Т = 2" Т , и = 1,2, где и - разрядность устройства. С выходов цифрового генератора 15 взвешенных частот текущий цифровой код Я поступает на информационные входы первого, второго и третьего регистров 16-18 и заносит128563 ся в них по импульсным цифровым сигналам синхронизации, формируемым на втором выходе генератора 12 опроса и выходах цифрового коммутатора 14 в соответствующие моменты времени теку щего такта преобразования.Одновременно по второй входной разрядной шине 27 управления выставляются цифровые и-разрядные коды И,ри Б ррграниц линейного перемещения 0 подвижного элемента 6 подмагничивания .магнитострикционного датчика 1 линейных перемещений, имеющего ,кинематическое соединение с внешним объектом контролируемого линейного переме щения.По импульсному цифровому сигналу синхронизации с второго выхода генератора 12 опроса производится запись текущего цифрового кода начальной 20 фазы преобразования в первый регистр 16, который выставлен на выходах цифрового генератора 15 взвешенных частот, а также "взведен" блок 24 синхронизации.25Одновременно (синхронно) на первом выходе генератора 12 опроса формируГ ется цифровой сигнал опроса, модулированный по частоте, и поступает на вход преобразователя 9 напряжение - ЗО ток, установленного в корпусе магнитострикционного датчика 1 линейных перемещений.,На его выходе формируется модулированный по частоте токовый импульс записи, поступающий на 35 вход неподвижного элемента 7 записи. Под ним в магнитострикционном канале 2 передачи возбуждена модулированная по частоте ультразвуковая волна механической деформации, распространяю щаяся в обе стороны по магнитострикционному каналу передачи датчика со скоростью 7.Распространяясь влево (по Фиг, 1) цо магнитострикционному каналу 2 пе редачи датчика от источника сообщения, импульсная ультразвуковая волна достигает акустического поглотителя 4 и рассеивает на нем свою энергию, прекратив свое существование. 50Распространяясь вправо, ультразвуковая волна проходит под неподвижным элементом 8 чтения и наводит на его выходе модулированный по частоте импульс напряжения, который уси ливается и демодулируется избирательным усилителем 10 чтения, установленным в корпусе магнитострикционного датчика 1 линейных перемещений, и 1 4проходит с его выхода на вход аналого-цифрового формирователя 13 чтения аналого-цифрового канала 11 преобразования устройства. На выходе аналого-цифрового формирователя 13 чтения формируется импульсный цифровой сигнал синхронизации, который проходит через цифровой коммутатор 14 на вход синхронизации второго регистра 17 и записывает в него текущий цифровой код начальной основной фазы преобразования, который выставлен в данный момент на выходах цифрового генератора 15 взвешенных частот. По этому цифровому сигналу синхронизации осуществляется асинхронный запуск блока 24 синхронизации, на выходе которого формируется импульсный цифровой сигнал стробирования, по которому производится переключение во второе состояние цифрового коммутатора 14, а также формирование на второй выходной шине 29 стробирования устройства цифрового строб-сигнала.Распространяясь вправо по магнитострикционному каналу 2 передачи датчика, ультразвуковая волна достигает границы отражения, образованной магнитным ползуном 3 из магнитной жидкости, расположенным в рабочей полости магнитострикционного канала передачи и удерживаемым радиальным магнитостатическим полем подвижного эле-. мента 6 подмагничивания, и, отразившись, изменит направление своего хода и в некоторый момент достигнет вторично неподвижного элемента 8 чтения, Прохождение ультразвуковой волны под элементом 8 чтения формирует на его выходе импульс напряжения, который проходит через избирательный усилитель 10,чтения, демодулируется и поступает на вход аналого-цифрового формирователя 13 чтения. С его выхода импульсный цифровой сигнал синхронизации проходит через цифровой коммутатор 14 на вход синхронизации третьего регистра 18 и записывает в него текущий цифровой код конечной основной фазы преобразования, который выставлен на выходах цифрового генератора 15 взвешенных частот в данный момент времени. В следующий момент на и-разрядном выходе блока 21 вычисления результата формируется итоговый цифровой код результата преобразования линейного пе" ремещения12856М 1= 1 /И,1, (1) где И 1,Х ; - цифровой код, формируемый на выходах первогои второго сумматоров19 и 20, который пропорционален формируемому результирующемувременному интервалулинейного перемещения:10Т 1= Т,/Т 1,где Т 1 = Йо/Ч;2/Ч;3 ,4 - зоны логометрического и основного преобразования.Этот цифровой код Ь; переписывается в четвертый регистр 22 по импульсному цифровому сигналу синхронизации генератора 12 опроса, задержанному по первому выходу элемента 23 20задержки. С его и-разрядного выходацифровой код итогового преобразованияпоСтупает на первую выходную разрядную шину 28 данных устройства и одновременно заносйтся в блок 25 контроля25перемещения по импульсному цифровомусигналу синхронизации, задержанномупо второму выходу элемента 23 задержки. В блоке 25 выполняется анализтекущего цифрового кода Их, результата относительно заданных границлинейного перемещения, заданных цифровыми кодами Ири Мге 2, В результате данного анализа на егош-разрядном выходе формируется цифровой код Бсостояния положения"(перемещения), который поступает натретью выходную разрядную шину 30контроля перемещения устройства,На этом текущий цикл преобразования заканчивается, и устройство подготовлено к следующему циклу преоб разования, который начинается с момента формирования импульсного цифро-.вого сигнала синхронизаций на втором; 45выходе генератора опроса устройстваи выполняется без изменения в соответствии с формулой (1).Использование в преобразователемагнитострикционного канала передачи с магнитным ползуном из магнитной,жидкости и использование внутриим- .пульсной модуляции позволяет повысить точность преобразования линейного перемещения в код путем повышения его помехоустойчивости и уменьшения неоднородности границы отражения относительно известного преобра 31 6зователя. А использование бесконтактного способа преобразования линейного перемещения позволяет повы-,сить его надежность путем увеличениясрока эксплуатации по сравнению сизвестным преобразователем.В преобразователе линейных перемещений (фиг.1) имеет место взаимосвязь направления перемещения и итогового результата преобразования.Устранить отмеченную зависимость позволяет представленный преобразователь линейных перемещений, магнитострикционный датчик которого выполнен по дифференциальной схеме(фиг.2).Преобразователь линейных перемещений по дифференциальной схеме работает следующим образом,Модулированный по частоте импульсный цифровой сигнал опроса по первому.выходу генератора 12 опроса поступает через первыйи второй преобразователи 9 и 35 напряжение - ток, установленные в корпусе магнитострикционного датчика 1.линейных перемещений, на входы первого и второгоэлементов 7 и 33 записи и возбуждаютв магнитострикционном канале 2 передачи ультразвуковые волны модулирующей частоты, распространяющиеся вобе стороны от источников сообщенияпо магнитострикционному каналу соскоростью Ч.Распространяясь влево и вправо помагнитострикционному каналу 2 передачи, ультразвуковые волны испытывают полное поглощение на акустическихпоглотителях 4 и 31.Одновременно, распространяясь вправо и влево по магнитострикционномуканалу 2 передачи датчика 1 от источников сообщений, ультразвуковые вол-ны достигают границ отражения, образованных магнитным ползуном 3 из магнитной жидкости, расположенным в зонерасположения подвижного элемента 6подмагничивания, имеющего кинематическое соединение с внешним объектомконтролируемого линейного перемещения, и, отразившись от границы отражения, изменяют направление своегохода, В моменты времениТ", =2(Й+6)/Ч и Т = 2(Фх+ ф)/Ч,где А-смещение от центра эоны ( +х12856 1. Преобразователь линейных перемещений, содержащий магнитострикционный датчик линейных перемещений., состоящий из магнитострикционного кана ла передачи, на котором установлены акустический поглотитель и элементы записи и чтения с элементами подмагничивания, о т л и ч а ю щ и й с я тем, что, с целью повышения точности 40 преобразования, магнитострикционный датчик линейных перемещений выполнен в виде трубчатого магнитострикционного канала передачи, подвижного эле-.мента подмагничивания, установленного 45 соосно с магнитострикционным каналом передачй, магнитного ползуна из магнитной жидкости, расположенного в .полости трубчатого канала передачи, преобразователя напряжение - ток, из. - 50 бирательного усилителя, а преобразователь линейных перемещений снабжен аналого-цифровым каналом преобразования, состоящим из генератора, опроса, аналого-цифрового формирователя чте нияцифрового коммутатора, цифрового, генератора взвешенных частот, перво". го, второго, третьего и четвертого регистров, первого и второго сумматотов 8 и 34 чтения формируются импульсынапряжения модулированной частоты вследствие обратного магнитострикционного преобразования.По этим импульсам напряжения чтения на выходах первого и второго аналого-цифровых формирователей 13 и 37 чтения формируются импульсные цифровые сигналы синхронизации, по которым производится запись текущих цифровых 10 кодов дифференциального преобразования во второй и третий регистры 17 и 18. В первом регистре 16 хранится текущий цифровой код начальной фазы преобразования, записанный в него по 15 импульсному цифровому сигналу синхронизации по второму выходу генератора 12 опроса.На и-разрядном выходе блока 21 вычисления результата формируется ито говый цифровой код результата преобразования линейного перемещения1 11.1 2,1Далее весь процесс преобразования полностью совпадает с описанным процессом преобразования для преобразователя линейных перемещений по фиг.1. Формула изобретения 30 31 8ров, блока вычисления результата,элемента задержки, блока синхронизации и блока контроля перемещения, при" чем выход избирательного усилителячтения магнитострикционного датчикалинейных перемещений соединен с входом аналого-цифрового формирователячтения аналого-цифрового канала преобразования, выход которого соединенс входом цифрового коммутатора, первый выход которого соединен с входомсинхронизаций второго регистра и стретьим входом блока синхронизации,а его второй выход соединен с входом синхронизации третьего регистра, информационные входы которого соединены с выходами цифрового генератора взвешенных частот и с информационными входами первого и второго регистров, выходы второго и третьего регистров соединены с первымй входами первого и второго сумматоров, вторые входы которых соединены с выходами первого регистра,.выходы первого и второго сумматоров соединены с первыми и вторыми входами блока вычисле-ния результата, его выходы соединены с информационными входами четвертогорегистра, вход синхронизации которого соединен с первым выходом элемента задержки, а его выходы соединены с первой выходной разрядной шиной данных и с первыми информационными входами блока контроля перемещения, у которого вторая группа информационных входов соединена с второй входнойразрядной шиной управления, выходысоединены с третьей выходной разрядной шиной контроля перемещения, аего вход синхронизации соединен с вторым входом элемента задержки, первый вход которого соединен с входом синхронизации первого регистра, свторым входом блока синхронизации и вторым выходом генератора опроса,при этом его первый выход соединенс входом преобразователя напряжение ток магнитострикционного датчика линейных перемещений, соединенного с элементом записи, а его вход управления соединен с первой входной шинойуправления, с входом управления цифрового генератора взвешенных частотИ с входом управления блока синхронизации, выход которого соединен свходом управления цифрового коммутатора и с второй выходной шиной стробирования преобразователя линейныхперемещений.2, Преобразователь линейных перемещений, содержащий магнитострикционный датчик линейных перемещений, состоящий из магнитострикционного канала передачи, на котором установлены акустический поглотитель и элементы записи и чтения с элементами подмагничивания, о т л и ч а ю щ и й с я тем, что, с целью увеличения точности, магнитострикционный датчик линейных перемещений выполнен в виде труб 1чатого магнитострикционного канала передачи с двумя акустическими поглотителями на концах, двух неподвижных и одного подвижного элементов подмагничивания с элементами записи и чтения, установленных соосно с магнитострикционным каналом передачи, магнитного ползунаиз магнитной жидкости, расположенного в полости трубчатого канала передачи, двух преобразователей напряжение - ток, двух избирательных усилителей чтения, а преобразователь линейных перемещений также снабжен аналого-цифровым каналом преобразования, состоящим из генератора опроса, первого и второго аналого-цифровых формирователей чтения, цифрового генератора взвешенных частот, первого, второго, третьего и четвертого регистров, первого и второго сумматоров, блока вычисления результата, элемента задержки, блока синхронизации, блока контроля перемещения, цифрового компаратора, при,чем выход первого избирательного усилителя чтения магнитострикционного датчика линейных перемещений соединен с входом первого аналого-цифрового формирователя чтения, а выход избирательного усилителя соединен с входом второго аналого-цифрового формирователя чтения, первый вход, генератора опроса соединен с входами первого и второго преобразователей напряжение - ток, выход перного аналого-циФрового формировате -ля чтения соединен с вторым регистром и блоком синхронизации, а выход второго аналого-цифрового форми рователя чтения соединен с третьимрегистром, информационные выходытретьего регистра соединены с выходами цифрового генератора взвешенныхчастот и с информационными входами 1 О первого и второго регистров, выходывторого и третьего регистров соединены с первыми входами первого и второго сумматоров, вторые входы которыхсоединены с выходами первого регистра, выходы первого и второго сумматоров соединены с первыми и вторымивходами блока вычисления результатаи входами цифрового компаратора, который подсоединен. выходом к блокувычисления результата, выходы которого соединены с информационнымивходами четвертого регистра, входсинхронизации которого соединен спервым выходом элемента задержки, аего выходы соединены с первой выходной разрядной шиной данных и с первыми информационными входами блока контроля перемещения, у которого втораягруппа информационных входов соединена с второй входной разрядной шиной управления, выходы соединены стретьей выходной разрядной шинойконтроля перемещения, а его выход синхронизации соединен с вторым входом 35 элемента задержки, вход которого соединен с входом синхронизации первогорегистра, с вторым входом блока синхронизации и вторым выходом генератора опроса, при этом его вход управ О ления соединен с первой входной шиной управления, с входом управленияцифрового генератора взвешенных частот и с входом управления бло-ка синхронизации, выход кото рого соединен с второй шинойстробирования.1 285 б 31 еФщщ оставитель М,Абросимовехред Л.Сердюкова Корректор С.Шек едактор Н.Рогули каз 7513/59 Тираж 63 НИИПИ Государст по делам изобр 13035, Москва, е 4/ Производственно-полиграфическое предприятие, г.ужгород, ул,Проектная, 4 7 Ь И Ьь 4а енного ктений и-35, Рау Подписмитета СССРткрытийская наб., д 1 1
СмотретьЗаявка
3857204, 20.02.1985
ДЕМИН СТАНИСЛАВ БОРИСОВИЧ
МПК / Метки
МПК: H04R 15/00
Метки: варианты, его, линейных, перемещений
Опубликовано: 23.01.1987
Код ссылки
<a href="https://patents.su/8-1285631-preobrazovatel-linejjnykh-peremeshhenijj-ego-varianty.html" target="_blank" rel="follow" title="База патентов СССР">Преобразователь линейных перемещений (его варианты)</a>
Программируемый цифровой генератор линейного напряжения

Номер патента: 2004068
Опубликовано: 30.11.1993
Авторы: Аверьянова, Головенко, Скляр, Шитов
МПК: H03K 4/02
Метки: генератор, линейного, программируемый, цифровой
...которого равен логической "1", а осе остальные равны нулю. В общем случае Оотр,реверса Онач., Опол.реверса могут принимать любые значения, но должно выполняться условие Остр.реверсаОнач - " " - Ч 3 пол.реверса.Управляющими входами генератора являются входы "Направление счета" (четвертый вход блока 10 управления), "Однократный (первый вход элемента И-НЕ 4), "Период/ 1/2 периода" (управляющий вход коммутатора 6), "Сброс" (установочные входы делителей 2, 3, первый вход второго элемента И 7 и пятый оход блока управления), "Пуск" (управляющие входы ДПКД 5 и . реверсивного счетчика 11, а также первый вход триггера 8), Логическая "1" на входе "Направление счета" в начальный момент времени соответствует нарастанию линейного напряжения, а...
Устройство для преобразования углового или линейного перемещения в электрический сигнал

Номер патента: 135126
Опубликовано: 01.01.1961
Автор: Краюшкин
Метки: линейного, перемещения, преобразования, сигнал, углового, электрический
...Техред А. А, Камышннкова Корректор С. Цверин 0,12 усл. и. л.Цена 3 коп. 77 6 Обь. одп. к пен. 10.1 Ч.61 г.ак. 3523ЦБТИ пр бумо; 108 а 7 к 1100 делам :зобре Министров 1. Черкасскийорма ений и открытийССР пер., д. 2/б омитете при Совева, Центр,." 1 о ипография ЦБТИ Комитета по делам изобретений и открытий при Совете Министров ГГСР, Москва, Петровка, 4.Устройство для преобразования углового или линейного перемещения в электрический сигнал, содержащее ряд сопротивлений, включенных по мостовой схеме, о т л и ч а ю щ е е с я тем, что, с целью упрощения конструкции, в нем применены четыре пары изолированных друг от друга полуколец, расположенных на различных радиусах диска, в котором для получения выходного сигнала достаточной мощности...
Генератор линейно-частотно-модулированных сигналов
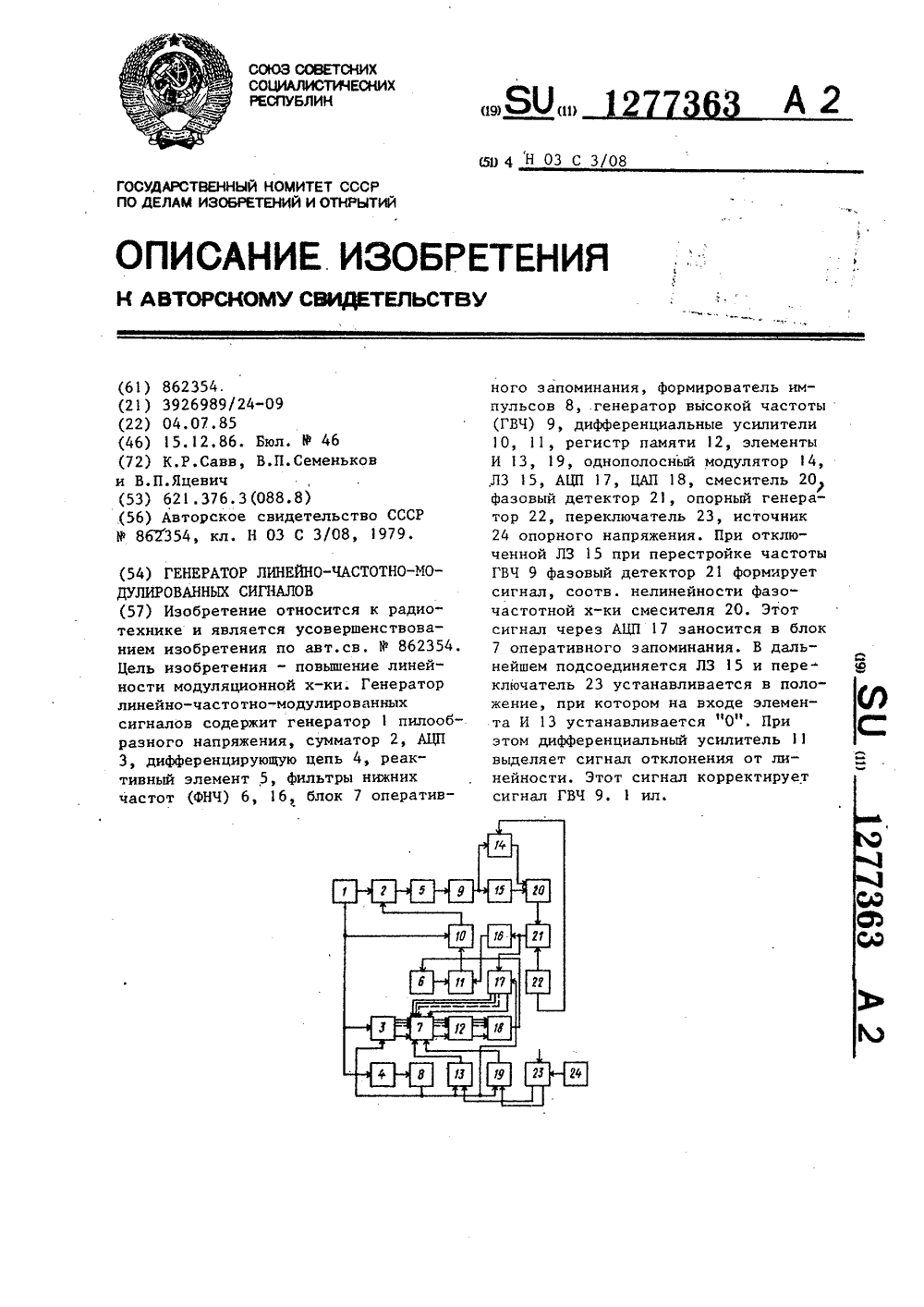
Номер патента: 1277363
Опубликовано: 15.12.1986
Авторы: Савв, Семенков, Яцевич
МПК: H03C 3/08
Метки: генератор, линейно-частотно-модулированных, сигналов
...8 импульсов синхронизируется первый АЦП3, зыходной цифровой код которогопропорционален выходному напряжениюгенератора 1, а следовательно, и частоте генератора 9 высокой частоты.Этот код поступает на разрядные адресные входы блока 7. На разрядныесигнальные входы его поступает кодовый сигнал с второго АЦП 17, который синхронизируется тем же импульсом, что и первый АЦП 3, Посколькуна одном входе первого элементаИ 13 установлен высокий потенциал,на вход записи блока 7 поступаетсигнал, по которому в память блока7 заносится цифровой сигнал с второго АЦП 17, Таким образом, каждаяячейка памяти блока 7 хранит значение Фазачастотной характеристики смесителя 20, причем номер этой ячейкиустанавливается кодом с первого АЦП3, который соответствует...
Устройство цифровой термокомпенсации частоты кварцевого генератора

Номер патента: 1676064
Опубликовано: 07.09.1991
Авторы: Будяков, Срывкина, Тяжкун
МПК: H03B 5/32
Метки: генератора, кварцевого, термокомпенсации, цифровой, частоты
...диапазоне температур.Делитель 8 имеет переменный коэффициент деления тактовой частоты с первого выхода делителя 7, Причем коэффициент деления задается числом У, выбираемым из блока 3. Число импульсов на выходе делителя 8 за один период квантования воспроизводит частоту квантования определенного линейного участка компенсирующей функции, заданного блоком 3,Счетчик 9 поручает с выхода блока 3 сигнал о знаке угла наклона компенсирующей функции кварцевого генератора 6, По этому сигналу счетчик 9 устанавливается в режим суммирования и вычитания импульсов, поступающих с выхода делителя 8. В счетчике 9 происходит накопление импульсов, воспроизводящих изменение определенного линейного участка компенсирующей функции кварцевого генератора 6....
Генератор линейно изменяющегося напряжения

Номер патента: 409357
Опубликовано: 01.01.1973
Авторы: Вител, Горох, Козицкий, Матвиив, Николайчук
МПК: H03K 4/50
Метки: генератор, изменяющегося, линейно
...коллекторного резистора. Увеличение сопротивления этого резистора приводит к повышению линейности и к увеличению длительности обратного хода выходного напряжения.Целью изобретения является повнейности прямого хода при знуменьшении длительности обратноходного напряжения генератора.Для этого в схему введены два ключевых транзистора так, что эмиттер первого из них соединен с коллектором усилительного транзистора и с одной обкладкой конденсатора, коллектор - с шиной питания, а коллектор второго ключевого транзистора соединен с базой усилительного транзистора, с другой обкладкой конденсатора и с разрядным резистором, эмиттер его соединен с общей шиной, а базы обоих ключевых транзисторов через резисторы подключены к источнику управляющего...
Предыдущий патент: Способ измерения нелинейности строчной развертки передающей телевизионной трубки и устройство для его осуществления
Следующий патент: Способ в. г. вохмянина отвода зарядов статического электричества
Случайный патент: Динамический фильтр