Устройство для управления рабочим органом бульдозера
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 953838
Автор: Погуляев







Текст
СОЮЗ СОВЕТСКИХшаицмюм есинРЕСПУБЛИК зш Е 02 Р 9/20 ГОСУДАРСТВЕННЬЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТЖ(56) 1. Исаков П,П. и др. ТракторДЭТи его модификации. М., "Машиностроение", 1975.2, Авторское свидетельство СССРР 172874, кл. Е 02 Р 9/20, 1964.3. Авторское свидетельство СССРпо заявке Р 2694118/03,кл. Е 02 Г 9/20, 1978 (прототип),(54)(57) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯРАБОЧИМ ОРГАНОМ БУЛЬДОЗЕРА, содержащее соединенные между собой тяговыйдвигатель и силовой генератор снезависимыми обмотками возбужденияи управляемым выпрямителем и два элемента сравнения, к одному из которых подключены датчик и задатчиктягового усилителя, о т л и ч а ющ е е с я тем, что, с целью повыщения Я 0953838 точности управления за счет компенсации помехи по скорости, оно снабжено задатчиком оптимальной скорости, блоком умножения, блоком деления, программным задающим блоком оптимальной скорости, программнымблоком, блоком переменной структурыи датчиком и эадатчиком тока, выходы которых подключены ко второму элементу сравнения, выход которого и выход программного блока подключеныко входам блока переменной структуры, выход последнего и выход программного задающего блока подключены куправляемому выпрямителю, причемвыходы эадатчика оптимальной скорости и первого элемента сравнениячерез блок умножения, а выходдатчика тягового усилия непосредственно подключены ко входам блока деления, выход которого подключенко входу программного задающего блока скорости.1 О Наиболее близким к изобретению является устройство для управления рабочим органом бульдозера 3 1, содер 35 жащее соединенные между собой тягоЪвой двигатель и силовой генератор с независимыми обмотками возбужденияли управляемым выпрямителем, два эле-, мента сравнения, к одному из которых подключены датчик и задатчик тягового усилия. Устройство содержит также насос, гидрораспределитель, силовой цилиндр45 для перемещения рабочего органа в вертикальной плоскости, контактный датчик положения штока силового цилиндра, генератор импульсов с корректирующим блоком, распределитель импульсов и электромагнитные клапаны. Электромагнитные клапаны связаны электрически через распределитель импульсов с генератором импульсов и контактным датчиком положения штока силового цилиндра, взаимодействующим с контактами на штоке силового. цилиндра. Устройство содержит также дополнительный силовой цилиндр, шарнирно Изобретение относится к устройствам для комбинированного управления эемлеройно-транспортными машинами.Известно устройство для управления процессом копания бульдозера, на пример, с электромеханической трансмиссией на базе трактора ДЭТГ 1 3.В известном устройстве управление отвалом осуществляется вручную, а скорость изменяется автоматически в зависимости от нагрузки на рабочем органе благодаря наличию трехобмоточного силового генератора в системе генератор-двигатель управления скоростью. Однако такие устройства не компенсируют одновременно помеху по скорости и тяговому усилию, Кроме того, они не реализуют оптимальных законов по скорости и глубине копания.20Известно также устройство 12 3 для управления скоростью землеройных транспортных машин с электрическими машинами независимого возбуждения, Однакоони также не обеспечивают своевременной компенсации помехи по скорости и изменение скорости по оптимальному закону при копании.С помощью таких устройств не уда-ется достичь наивысшей производитель-Зо ности землеройных агрегатов. установленный между толкающим брусом и отвалом, две пары электромагнитных клапанов - пару для заглубления отвала и пару для его выглубления путем изменения угла резания отвала, тензодат.- чик, задатчик тягового усилия, логическое устройство с двумя выходами (плюс, минус), соединенное на входе с устройством сравнения, а также инвертор, уставку поворота срабатывания, сравнивающее устройство, усилитель. Вход инвертора соединен с вы- ходом логического устройства со энаком минус, а выход усилителя - с парой электромагнитных клапанов заглубления отвала. Устройство имеет соединенные между собой уставку порога срабатывания электромагнитных клапанов, устройство сравнения. Усилитель и устройство сравнения соединены с выходом логического устройства со знаком плюс, а выход усилителя - с парой электромагнитных клапанов. /Это устройство реализует оптимальный закон изменения глубины копания и осуществляет компенсацию помехи по тяговому усилию с помощью комбинированного управления рабочим органом, но не реализует оптимального закона изменения скорости и не компенсирует помех по скорости одновременно и взаимосвязанно с компенсацией помехи по тяговому усилию.В результате процесс копания затягивается и не достигается наибольшая производительность агрегата при копании.Целью изобретения является повышение точности управления за счет компенсации помехи по скорости.Поставленная цель достигается тем, что предложенное устройство снабжено задатчиком оптимальной скорости, блоком умножения, блоком деления, программным задающим блоком оптимальной скорости, программным блоком, блоком переменной структуры и датчиком и эадатчиком тока, выходы которых подключены ко второму элементу сравнения, выход которого и выход программного блока подключены ко входам бпока переменной структуры, выход последнего и выход программного задающего блока подключены к управляемому выпрямителю. Выходы задатчика оптимальной скорости и первого элемента сравнения через блок умножения, а выход датчика тягового усилия непосред3 95383ственно подключены ко входам блока деления, выход которого подключен ковходу программного задающего блокаскорости.Сущность изобретения поясняетсяследующим.Для тягового КПД 1,= УЧ(2) Помеха по тяговому усилию вызывает помеху по скорости со знаком (-дЧ 1 и наоборот"оптЧопт=Ропт+д "1("опт дЧ 1 (41 Из уравнения (4) получим выражение для определения помехиЬЯЧдЧ - оптопт +д 1"опт+"= "изб Но40 где Уиь - текущее значение тяговогоусилия, измеренное с помощью тензодатчика.формулу (5) можно записать в виде 45оптдЧ = Согласно выражению (7) для вычиспения величины помехи по скорости,помехи, которую нужно компенсировать,чтобы процесс бып более производительным, необходимо перемножить величины дМ и Чопт 1 и зто произведение разделить на У,Причем, необходимо отметить, чтовеличина АМ и величина рь могутбыть выделены с помощью элементов изгде т - оптимальное тяговое уси О.лие при отсутствии помехи;У - оптимальная скорость приотсутствии помехи в идеальном случае.При наличии помехи по тяговому 15усилию д т и скорости дЧ длядостижения наибольшей проиэводительФности процесса копания необходимо,чтобы правая часть уравнения (1) приотсутствии помех равнялась правой 20части этого же уравнения при наличии помех.Если имеется помеха по тяговомуусилию д 9, то запишем+дг, 25опт,8 4вестного устройства для комбинированного управления рабочим органом,но при отсутствии устройства длякомбинированного управления отваломвеличина дЧ вычислена быть не может,т,е. величина помехи ьЧ и д т тесносвязаны между собой. Если помеха имеет знак минус, а помеха дЧ - знакплюс, то для вычисления дЧ используем также формулу (7), В этом случае Таким образом, для компенсации помехи по скорости необходимо прежде вычислить ее величину. Кроме того, необходимо реализовать оптимальную траекторию скорости и показать как нужно ее менять с целью компенсации помехи.На фиг.1 изображена структурная схема устройства для управления на фиг,2 - графики, показывающие реализацию оптимальных законов изменения скорости и глубины при идеальном грунте; на фиг.З - график, условно показывающий отклонения +49 тягового усилия от задаваемого из-эа неоднородности грунта; на фиг.4 - график, условно показывающий изменения глубины копания (отклонения дЬ от текущего значения Ь ) путем автоматического изменения угла резания отвала для компенсации отклонения тягового усилия от задаваемого, на фиг.5 - график, показывающий реализацию оптимального закона углубления при "неоднородном" грунте с учетом отклонения глубины копания в пределахд Ъ ; на Фиг.б - график, условно показывающий изменения скорости 1 дЧ агрегата при копании, возникающие за счет неоднородности грунта; на фиг.7 - график, показывающий реализацию оптимального закона изменения скорости с отклонениями за, счет компенсации помехи в пределах 1 ЬЧ на фиг,8 - графики,. показывающие оптимальные законы изменения задающего воздействия, позволяющего реализовать оптимальные законы скорости при отсутствии (1) и наличии помехи (1).Устройство содержит тяговый двигатель 1 с независимой обмоткой возбуждения и силовой генератор 2 с независимой обмоткой возбуждения, соединенные между собой, управляе 5 9538 мый выпрямитель 3, соединенный с обмоткой возбуждения силового генератора н с программным задающим устройством для скорости.Устройство содержит также датчик 5 тока 4, задатчик тока 5, подключенные к элементу сравнения 6, блок переменной структуры 7 и программный блок 8. Выход элемента сравнения б соединен со входом блока переменной 1 О структуры 7, с которым соединен также программный блок 8. Выход блока переменной структуры 7 соединен со входом управляемого выпрямителя 3.Устройство содержит блок умноже ния 9, эадатчик непрерывного закона оптимальной скорости 10, соединенные между собой. Блок умножения соединен с выходом элемента сравнения 11. Устройство содержит датчик 12 20 и задатчик 13 тягового усилия и блок деления 14, который соединен на входе с блоком умножения 9 и датчиком 12, а его выход соединен с программным задающим блоком по скорости 15. 25Оптимальный закон изменения скорости при копании, развиваемой двигателем 1, соединенным с генератором 2, реализуется при помощи программного задающего блока 15 через з 0 управляемый выпрямитель 3, соединенный с, независимой обмоткой возбуждения силового генератора.Оптимальный закон задающего воздействия (фкг.8, кривая 2) изменяетсяэквивалентно оптимальному закону скорости (фиг,2, кривая 3)т.е. таким об.разом, что в любой точке на кривойзадающего воздействия (фиг.8 кривая 2)можно поставить в соответствие одну 40и только одну точку на кривой 3(фиг.2).При технической реализации непрерывной траектории задающего воздействиякусочно-постоянными значениями (кривая 1,фиг.8),которые реализуются программным задающим блоком по скорости 15, реализуется с учетом переходного процесса в системе генератор- двигатель траектория скорости 2, близ" кая к оптимальной 1 (фиг.7) . Для того чтобы наиболее точно реализовать задающее воздействие (кривая 1 фиг.8) или для того чтобы наиболее точно воспроизвести регулируемой координатой, т.е. скоростью, изменяющееся задающее воздействие, введен контур обратной связи по 38скорости в зависимости от нагрузки(тока). Для этого используется задатчик тока 5, который воспроизводитоптимальную траекторию тока нагрузкидатчик-измеритель текущего значениятока 4 (фия.4), элемент сравнения,который вычисляет их разность, блокпеременной структуры 7, который пре-образует (усиливает) сигнал д 1 и подает его на вход управляемого выпрямителя 3,Для устойчивости нелинейной системы генератор-двигатель при изменении управляющего сигнала на входекоэффициент обратной связи К измеОГняется во время копания блоком переменной структуры 7 по программе, задаваемой программным блоком 8,Описанный замкнутый контур реализует оптимальный закон изменения скорости без компенсации возмущающегодействия - помехи и реализует, поскольку он замкнутый, фундаментальный принцип управления по отклонению.Для компенсации помех по скоростииспользуется другой контур. Он сос-.тоит из блока умножения 9, на которомперемножаются величины В Ч и Чпоступающие в этот блок с задатчика 10 и датчика 12. ПроизведениеД 9 Ч оп делится на блоке деления 14 на значение измеренногозначения тягового усилияпоступающего с датчика 12, Так вычисляется величина помехи по скорости дЧ (7), которая с выхода блока деления 4 поступает на входпрограммного задающего блока по скорости 15Вычисляемые значения ф ЬЧ показаны на фиг.б условно в виде скачков помехи по ЧПри подаче сигналов, пропорциональных 1 йЧ , с выхода блока деления 14 на вход программного задающего блока 15 программа изменения задающего воздействия изменяется (фиг.8, кри.вая 1) так, что в каждый момент времени влйяние помехи о скорости сводится к нулю.Соответственно (кривая 3, фиг.7)меняется и траектория скорости.0 пксанный контур реализует фундаментальный принцип управления по возмущению - помехе по скорости. Однако в данном случае помеха не измеряется о непосредственно, а получается вычислением через другие координаты: помеху7по тяговому усилию аУ оптимальное заданное значение скорости Чорт и измеренное значение тягового усилия 3 ,.В этом устройстве реализуются в комбинации (каждый своим контуром) два фундаментальных принципа управления: принцип управления по отклонению реализуется программной системой управления скоростью, замкнутой для устойчивости (зту систему определяют 10 часто как,комбинированную следящую систему), принцип управления по возмущению реализуется контуром для компенсации помехи, который включает (измеритель) вычислитель помехи или 15 возмущения (блок деления), сигнал с которого изменяет программу задания по скорости и реализует принцип управления по возмущению.Кроме того, комбинированное уп равление по скорости не может осуществляться без комбинированного управления по тяговому усилию ибо величина помехи по скорости вычисляется через параметры помехи по тяговому 25 усилию ди измеренное тяговое усилие.При комбинированном управлении скоростью агрегата помеха по скорос 38ти не проходит в силовую установку трактора, а своевременно компенсируется, что не вызывает колебаний мощности силовой установки и не снижает производительность агрегата. Вследствие одновременной и взаимосвязанной компенсации помех по тяговому усилию скорости снижаются колебания скорости агрегата, что также ведет к повышению производительности агрегата,На фиг.3,6,7 показано условно,что помехи по М и Ч , а также изменение скорости при компенсации осуществляются скачком. На самом деле эти изменения проводят более плавно во времени.Предложенное устройство позволяет снизить колебания по скорости и мощности силовой установки, что повышает производительность агрегата.Экономический эффект от использования изобретения при повышении производительности на 5-8 Х бульдозера на базе ДЭТможет составить за пять лет эксплуатации 8-12 тыс. руб. на одну машину.Тирам 644ВНИИПИ Государственного комитепо делам изобретений и открытий113035, Москва, 3-35, Рауаская Заказ одаис СССР аб лиал ППП "Патент", г. Ужгород, ул. Проектная,
СмотретьЗаявка
2885740, 20.02.1980
Ю. Д. Погуляев и А. Д. Погуляев
ПОГУЛЯЕВ Ю. Д, ПОГУЛЯЕВ А. Д
МПК / Метки
МПК: E02F 9/20
Метки: бульдозера, органом, рабочим
Опубликовано: 30.05.1984
Код ссылки
<a href="https://patents.su/7-953838-ustrojjstvo-dlya-upravleniya-rabochim-organom-buldozera.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления рабочим органом бульдозера</a>
Пересчетное устройство

Номер патента: 974593
Опубликовано: 15.11.1982
Автор: Дронов
МПК: H03K 23/00
Метки: пересчетное
...регистрируя его, переключает начинается с проведения режима само- первый счетный разряд в единичное сопроверки, осуществляющего самоконт- стояние (фиг. 2, диаграмма 26), фор" роль устройства на работоспособность. мируя на первой группевходов блока 2 Для этого на шину 9 поступают им- сравнения число, содержащее единицу пульсы (Фиг. 2, диаграмма 15) с час- в младшем счетном разряде. тотой следования равной или на поря 56Таким образом; к моменту прихода док больше рабочей частоты устройст- второго импульса, поступающего по шива; поступающей по шине 10 устройст- не 9 устройства, блок 2 сравнения ва. Это позволяет осуществлять само- подготовлен к работе, и по приходу ; контроль устройства на работоспособ- второго импульса на управляющий вход...
Блок независимого изменения уставок вечернего и утреннего порогов срабатывания фотореле

Номер патента: 140852
Опубликовано: 01.01.1961
Автор: Тюшкевич
МПК: H01H 47/24
Метки: блок, вечернего, изменения, независимого, порогов, срабатывания, уставок, утреннего, фотореле
...Рреле Р 5 коммутирует соответствующую цепь управления уличным освещением.Сопротивления Л, и Л, являются добавочными к обмотке реле Р; и, кроме того, одновременно используются в качестве делителя напряжения для сигнальных неоновых ламп ЛСи ЛС,Лампа ЛСсигнализирует наличие напряжения на выходе выпрямителя В, блока питания. Лампочка ЛСсигнализирует о включении уличного освещения (включение исполнительного реле Р 5),Диод Дг и конденсатор Сг служат для улучшения искрогашения контакта Рз реле Ра также замедления включения реле Р 5.Диод Д, и термосопротивление ТС служат для замедления отключения реле Р,. Замедление работы реле Р 5 необходимо для предотвращения срабатывания фотореле при кратковременных изменениях освещенности.В целом фотореле...
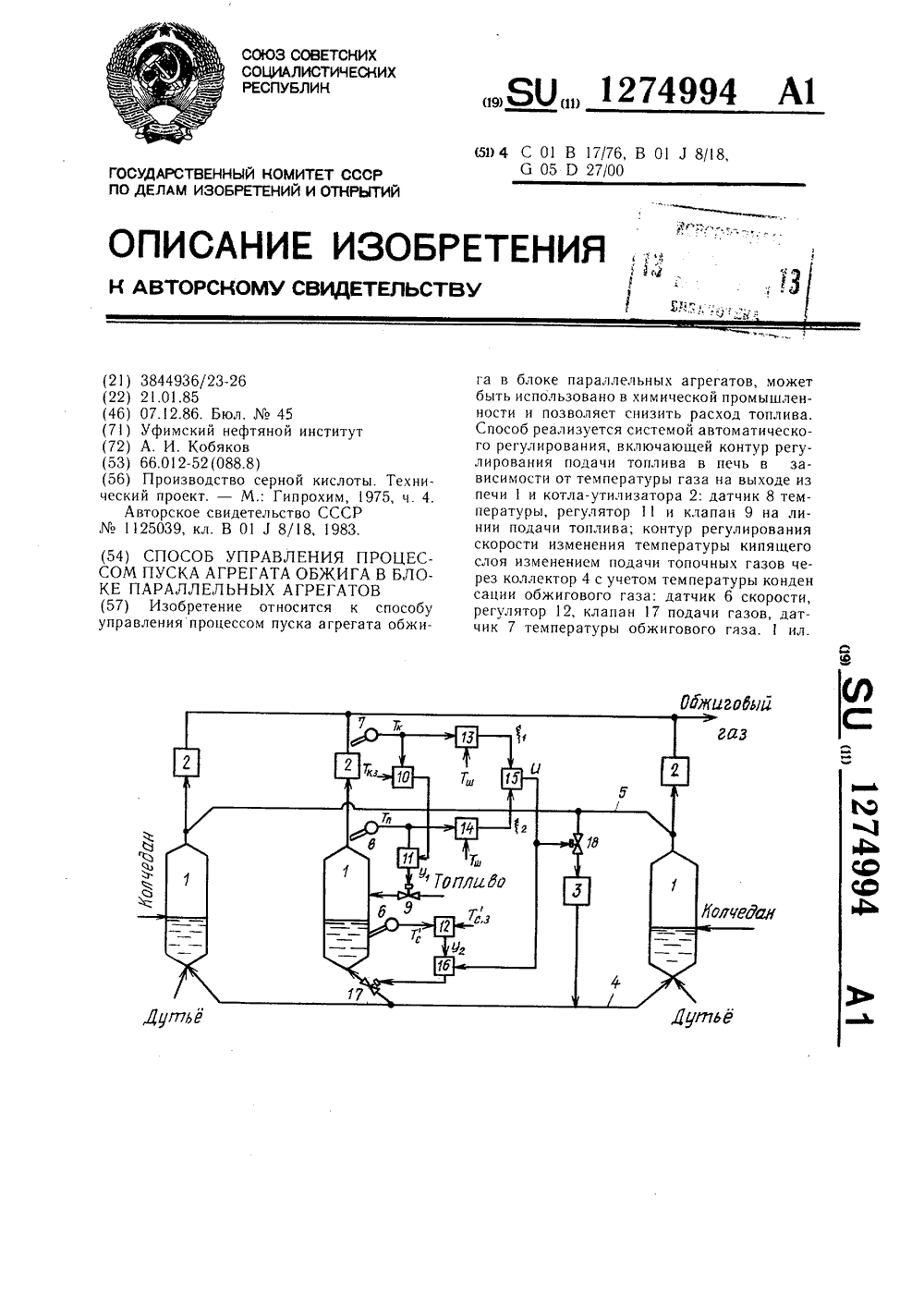
Способ управления процессом пуска агрегата обжига в блоке параллельных агрегатов
Номер патента: 1274994
Опубликовано: 07.12.1986
Автор: Кобяков
МПК: B01J 8/18, C01B 17/76, G05D 27/00
Метки: агрегата, агрегатов, блоке, обжига, параллельных, процессом, пуска
...ца первыйвгол регулятора 1. Одцовреыеццо ца второй вход полают задание. В регуляторе эти сигналы сравнивают и цо величине отклонения текущего значения температуры от задания формируют, например, по ПИ-зако ну выхолцой сигнал, который подают царегулирующий орган 9, установленный ца линии топлива, и измецякт, тем самцы, подацу то 11 ли на в печь так, цтобы устра- ЦИТЬ ОТК;1 ОЦЕЦИЕ.Задание формируют в регуляторе 10 цо З 5 текущей и заданной температурам на выходе котла-утилизатора. Для этого измеряют датчиком 7 температуру ца выхоле котла.Сип 1 ал от латцика ц залацие полают ца регулятор 10, в котором их сравнивают и 4 О формируют, например, по ПИ-закоцу выхолцой сигнал, который корректирует температуру в пеци так, цтобы устранить...
Устройство для защиты от изменения напряжения и частоты блока автономного асинхронного генератора

Номер патента: 1730708
Опубликовано: 30.04.1992
Авторы: Витовский, Кадыркулов, Шпартько
МПК: F03B 15/00, H02H 3/24, H02H 7/093, H02P 9/46
Метки: автономного, асинхронного, блока, генератора, защиты, изменения, частоты
...срабатыванияреле 66 напряжения последнее срабатыва 55ет, замыкаются контакты 67, 68 этого реле, открываются тиристоры 76, 77, подключая балластное сопротивление 21 к выходным выводам 34, 35 блока асинхронного генератора 1, После подключения сопротивления 21 напряжение на выходных выводах 34, 35 снижается и оказывается в заданных допустимых пределах. В таком режиме с подключенным сопротивлением 21 микроГЭС может работать длительное время.Подключение сети к блоку асинхронного генератора 1 осуществляется путем нажатия кнопки 26 "Пуск", при этом срабатывает магнитный пускатель 22, замыкаются контакты 23, 24, 25 магнитного пускателя, и после отпускания кнопки 26 "Пуск" магнитный пускатель 22 удерживается в сработанном состоянии током,...
Способ компенсации изменения толщины прокатываемой полосы вследствие проявления «эффекта скорости» на непрерьвных станах холодной прокатки

Номер патента: 176549
Опубликовано: 01.01.1965
МПК: B21B 37/46
Метки: вследствие, изменения, компенсации, непрерьвных, полосы, прокатки, прокатываемой, проявления, скорости, станах, толщины, холодной, эффекта
...СЦЛЪСЕ 1)СЕ)0 ОКЯЗЬВ 1 СТСЯ В зевс Валков Второй клети. 1 ля этого случая 25 по мер( с)цкения скорости стана увсличива 1 От нят 5)жени .)екду церВОЙ и ВтороЙ клетями Воздействием па скорость первой) клети, что приводит к компенсации утолщения нолоСЫ, ВОЗНИКЗЮЩЕГ еорости.В тех случаях, когда утолщение полосы засчет эффекта скорости проявляется в зевевалков второй и третьей клети, увеличиваютцятяжснцс мсЕд 7 первои ц Второи, 2 тя)(жевторой ц третьси клетяхи воздеЙствцем В соответствуОщем соотношении на скорости первой и второй клетей,П р 2 ет ц 1 е с е и д,1 я в с с.; р е ж и м 0 г и р 0 е 2 т 1( иеомнснсяцц 51 деЙствия эффеет 2 сеоростиП 1)едлягае)(Ь)м способом может сыть достигнута ьоздсйстВцсм ца сеорость перВОЙ или 12скорость...
Предыдущий патент: Монотронный генератор и способ генерации колебаний в нем
Следующий патент: @, @ -бис-(4-оксифенокси)фторзамещенные арилы в качестве мономеров для термостойких полимеров
Случайный патент: Звено типа трубы