Регулятор
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
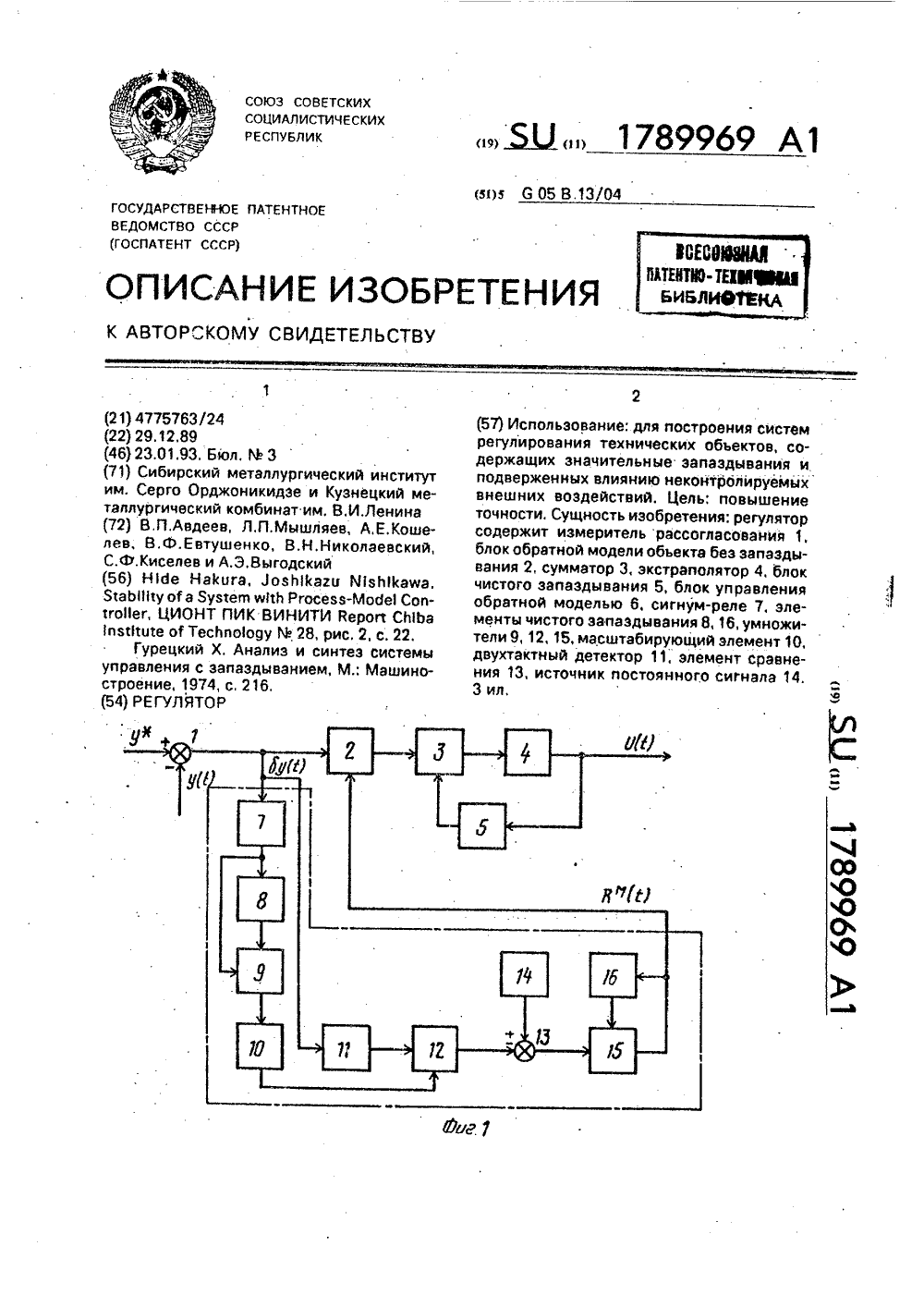
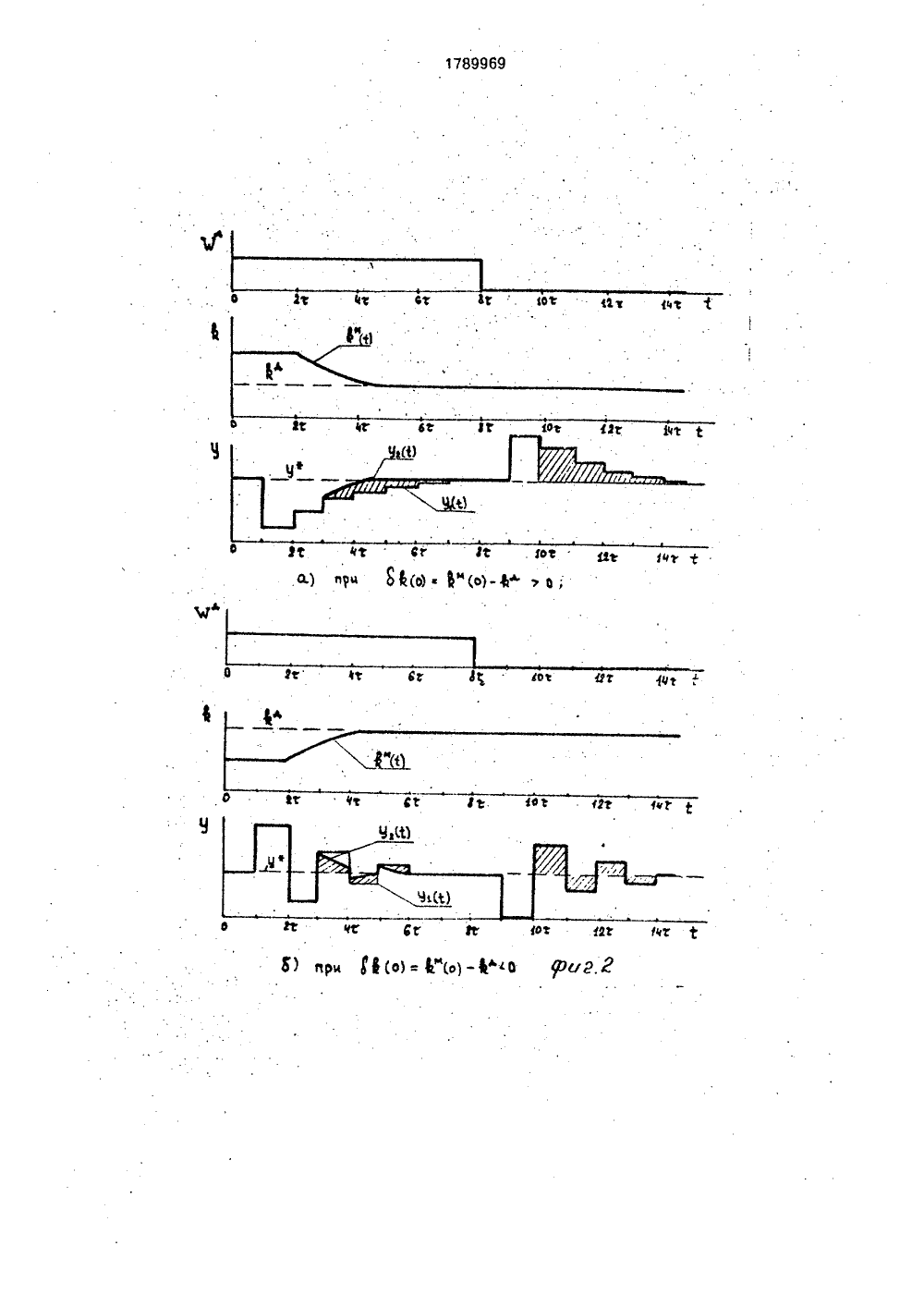
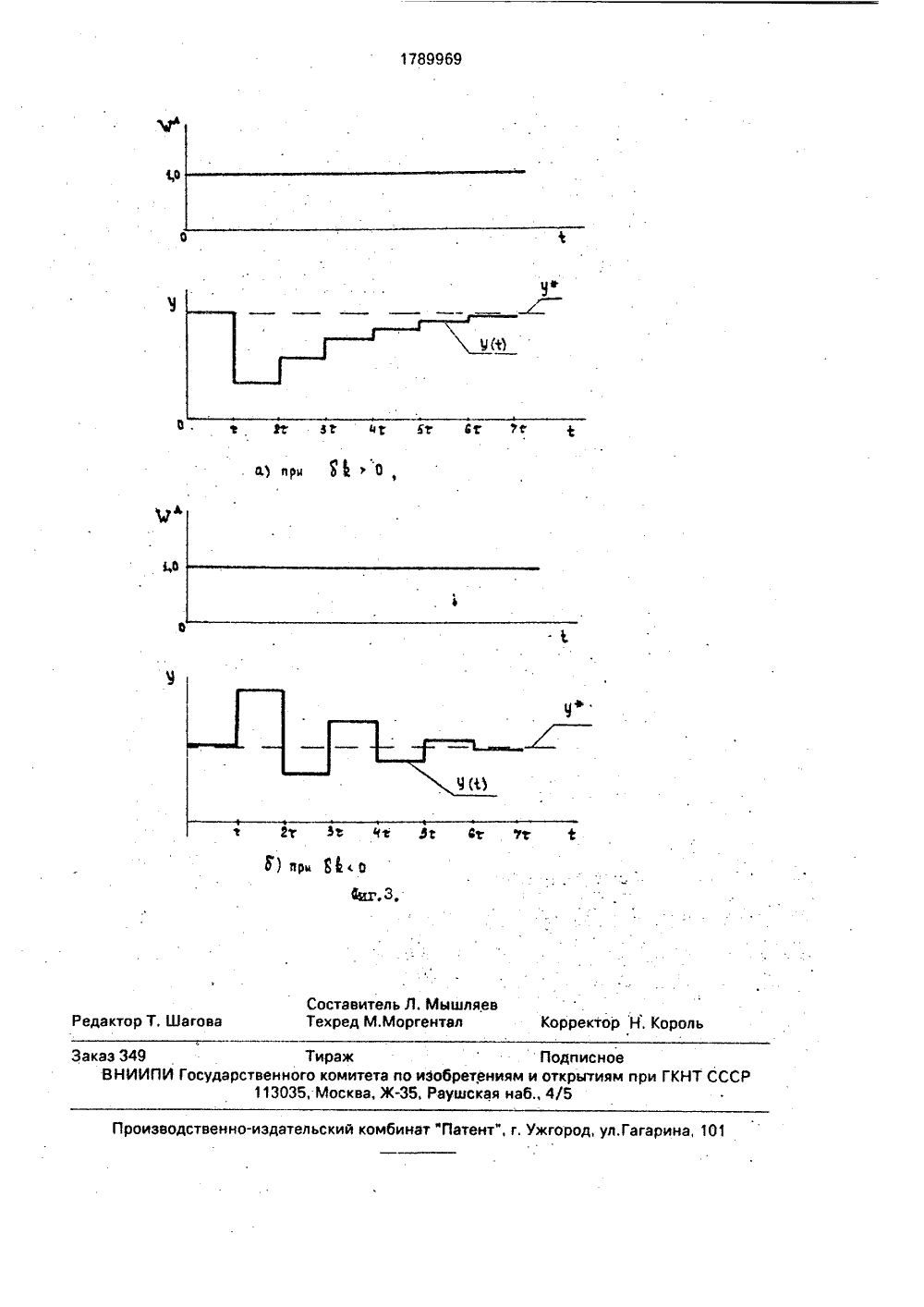
(19) 111) 1)5 6 05 В 13 Е ГОСУДАРСТВЕННОЕ ПАТЕНТНВЕДОМСТВО СССРГОСПАТЕНТ СССР) ОПИСАНИЕ ИЗОБ К АВТОРСКОМУ СВИДЕТЕЛЬСТВ(71) Сибирский металлургический институтим. Серго Орджоникидэе и Кузнецкий металлургический комбинат им, В,ИЛенина(56) Н)ое На 1 цга, )озЫМаы ЮэЫМана,51 аЬ 1 у о 1 а Яузте 1 п а)й Ргосеээ-Моде Соп 1 гоег, ЦИОНТ ПИК ВИНИТИ йерогт СЫЬапэтЬ 1 те оГ Тесбпооду М 28, рис. 2, с. 22,Гурецкий Х, Анализ и синтез системыуправления с запаздыванием, М,: Машиностроение, 1974, с, 26,(57) Использование: для построения систем регулирования технических объектов, содержащих значительные запаздывания и подверженных влиянию неконтролируемых внешних воздействий. Цель: повышение точности. Сущность изобретения: регулятор содержит измеритель рассогласования 1, блок обратной модели объекта беэ запаздывания 2, сумматор 3, экстраполятор 4, блок чистого запаздывания 5, блок управления обратной моделью 6, сигнум-реле 7, элементы чистого запаздывания 8, 16, умножители 9, 12, 15, масштабирующий элемент 10, двухтактный детектор 11, элемент сравнения 13, источник постоянного сигнала 14.3 ил,Изобретение относится к автоматическому управлению и регулированию и может быть использовано для построения системы регулирования технических объектов, содержащих значительные запаздывания и подверженных влиянию неконтролируемых внешних воздействий.Предполагается, что динамика канала регулйрования достаточно хорошо аппроксймируетсмоделью(т) -КВ) 0(т - т) +где У(т) - выход объекта регулирования;0(т) - регулирующие воздействия;К(с) - коэффициент передачи, существенно изменяющийся во времени (т);Ю(т) - неконтролируемые внешние возмущения, изменения которых носят ступенчатый характер, причем интервал между этими изменениями превышает время переходного процесса системы;т - время чистого запаздывания.Примером таких систем в промышленности является, в частности система автоматического регулирования температуры в рабочем пространстве нагревательного колодца обжимного цеха, где коэффициент передачи, характеризующий влияние изменений расхода газа на температуру рабочего пространства печи меняется в течение периода нагрева в зависимости от массы садки, марки стали, температуры металла и других факторов,Задача регулирования состоит в обеспечении инвариантности регулируемой координаты от внешних воздействий и изменений коэффициента передачи К, Один из возможных подходов в таких ситуациях состоит в косвенном измерении характеристик внешних воздействий, прогнозировании этих измерений на интервал длительности т и в использовании результатов прогнозирования в функции управления,Известен регулятор, содержащий сумматор, низкочастотный фильтр, в частности апериодическое звено первого порядка, охваченный положительной обратной связью, и обратную модель объекта без запаздывания,Недостатком этого регулятора является низкая точность регулирования.Наиболее близким по технической сущности является регулятор Реовика, содержащий последовательно соединенный измеритель рассогласования, блок обратной модели объекта без запаздывания, сумматор, элемент задержки и масштабирующий злемент, первый и второй входы измерителя.рассогласования подключены к первому ивторому входам регулятора, выход сумматора подключен к выходу регулятора, а выход5 масштабирующего элемента - к второмувходу сумматора,При работе известного устройства напервый, положительный, вход измерителярассогласования подается сигнал, пропор 10 циональный заданному значению регулируемой величины, на второй вход -измеряемый сигнал, Выходной сигнал измерителя рассогласования подается на входблока обратной модели объекта без запаз 15 дывания и далее на первый входсумматора,в котором происходит суммирование выходного сигнала блока обратной модели объекта без запаздывания с выходным сигналоммасштабирующего элемента, который пред 20 варительно задерживается в элементе задержки. Результат суммирования поступаетна вход элемента задержки и одновременнона выход регулятора в качестве регулирующего воздействия на объект.25 Недостаток известного устройства заключается в низкой точности регулирования, обусловленной временным дрейфомкоэффициента передачи регулируемого объекта.30 Цель изобретения - повышение точности регулятора,Поставленная цель достигается тем, чтов регулятор, содержащий измеритель рассогласования, подключенный выходом к ин 35 формационному входу обратной моделиобъекта управления без запаздывания, соединенной выходом с первым входом сумматора, подключенного вторым входом квыходу блока чистого запаздывания, при 40 чем суммирующий и вычитающий входы измерителя рассогласования являютсявходами "задания" и регулируемой величины регулятора, введены блок управлениямоделью и экстраполятор, соединенныйвходом с выходом сумматора, а выходом -со входом блока чистого запаздывания,вход блока управления моделью подключенк выходу измерителя рассогласования, а выход - к управляющему входу обратной моде 50 ли объекта управления без запаздывания,причем блок управления моделью состоитиз двухтактного детектора, источника постоянного сигнала и последовательно соединенных сигнум-реле, первого элемента55 чистого запаздывания, первого умножителя, масштабирующего элемента, второгоумножителя, элемента сравнения, третьегоумножителя и второго элемента чистого запаздывания, подключенного выходом ко второму входу третьего умножителя, сумми 1789969рующий вход элемента сравнения соединенс выходом источника постоянного сигнала,вторые входы первого и второго умножителей соединены с выходами, соответственно,сигнум-реле и двухтактного детектора, входы которых соединены друг с другом и являются входом блока управления моделью, авыход третьего умножителя является выходом блока управления моделью, обратнаямодель обьекта управления без запаздывания выполнена в виде делителя, входыкоторого "делимое" и "делитель" являютсясоответственно информационным и управляющим входами, а выход - выходомобратной. модели объекта управления без 15запаздывания, выход экстраполятора является выходом регулятора, а вреМя запаздывания блока и элементов чистогозапаздывания равны времени запаздывания объекта управления. 20Введение совокупности новых блоков исвязей позволяет распознавать ситуации,когда модельный коэффициент передачи К"управляемого объекта отличается от егодействительного значения Кд, и корректировать это значение, что повышает точностьрегулирования.На фиг. 1 представлена блок-схема регулятора; на фиг, 2 - результаты проверкиэффективности предлагаемого регулятора; 30на фиг. 3 - типичный характер переходногопроцесса а системе регулирования в ответна единичное ступенчатое воздействие приусловиях, когда;а)дК= К"-КдОи 35б)д К = К"- Кд О,На фигурах приняты следующие обозначения:У(т) - выходной сигнал системы регулирования (регулируемая величина); 40У - заданное значение регулируемойвеличины;0(1) - выходной сигнал регулятора (регулирующее воздействие);д У(т) = У- У(1) - сигнал ошибки регулирования;К"(1) - сигнал, пропорциональный модельному значению коэффициента передачи регулируемого объекта;Юд - внешнее возмущение на объект; 50Кд - действительное значение коэффициента передачи регулируемого обьекта;У 1(т) - переходный процесс а системерегулирования с регулятором-прототипом;Уф) - переходный процесс в системе 55регулирования с предлагаемым регулято-ром;г - запаздывание в регулирующем кана- .ле объекта. ГРегулятор содержит последовательно соединенные измеритель 1 рассогласования, блок 2 обратной модели обьекта без запаздывания, сумматор 3, экстраполятор 4, блок 5 чистогозапаздывания, выход которого соединен со вторым входом сумматора 3, блок 6 управления обратной моделью, включающий последовательно соединенные сигнум-реле 7, первый элемент 8 чистого запаздывания, первый умножитель 9, масштабирующий элемент 10, последовательно соединенные двухтактный детектор 11, второй умножитель 12, элемент 13 сравнения, ко второму входу которого подключен источник 14 постоянного сигнала, а к выходу - третий умножитель 15, выход которого соединен со входом второго элемента 16 чистого запаздывания и вторым входом блока 2 обратной модели объекта без запаздывания, а второй вход с выходом источника 14 постоянного сигнала, выход масштабирующего элемента 10 соединен со вторым входом второго умножителя 12, выход измерителя 1 рассогласования соединен со входом сигнум-реле 7 и входом двухтактного детектора 11.В процессе функционирования регулятор выполняет две основные функции:1) формирование регулирующих воздействий с целью компенсации ошибки регулирования;2) непрерывное уточнение коэффициента передачи регулируемого объекта.Реализация первой функции осуществляется следующим образом, На первый вход измерителя рассогласования 1 подается сигнал У, пропорциональный заданному значению регулируемой величины, а на второй вход - измеряемый сигнал У. В измерителе рассогласования из заданного значения вычитается измеряемый сигнал, формируя на своем выходе сигнал д У(т), пропорциональный ошибке регулирования, т,е. д У(т) - У - У(т),Сигнал ошибки, проходя через блок обратной модели 2 обьекта без запаздывания, формирует сигнал, пропорциональный значению - (У - У(1, (где1КмК" - модельный коэффициент передачи объекта), который в свою очередь поступает на первый вход сумматора 3, В сумматоре этот сигнал складывается с входным сигналом первого элемента чистого запаздывания 5, Результат суммирования подается на вход экстраполятора 4, выходной сигнал которого поступает в качестве регулируемого воздействия 0(т) на выход регулятора и одновременно на вход первого элемента чистого запаздывания 5. Таким образом,1789969 10 30 ских методов 40 дующим образом регулятор реализует следующий закон регулированияло= Чо( - г"; О( - тф) = О( - тф) + У - У(:Кмгде Т - оператор экстраполирования.Процедура уточнения коэффициента передачи регулируемого объекта базируется на следующих соображениях.При заданном законе регулирования лО= О( - тф) О( - г") = О( - т") + - (У - У(1где для простоты рассуждений Ь - 1,модели объектаУ = К" О( - Р) + ЧЧд( - г"),где ЧЧд - возмущение, имеющее ступенчатый характер изменения,и при выполнении условийлО = О ; У = сопз;тф =Р=т;необходимо определить алгоритм регулирования, выполняющий и функцию уточнениякоэффициента К".При таких условиях ошибка регулирования будет обусловлена неточностью коэффициента передачи, т,е,Если д КО, то есть К"Кд, то в соответствии с расчетом по указанным вышеформулам переходный процесс в системе регулирования в ответ на единичноеступенчатое воздействие по возмущению,ЧЧф - д) = 1, имеет форму, представленнуюна фиг. 3, а.Если д КО, т,е. К"Кд, то ошибкарегулирования имеет знакопеременный характер. аналогичный представленному нафиг,З, б,Таким образом, по форме переходногопроцесса У в рассматриваемой системерегулирования можно распознавать указанные выше ситуации, те, д К 0 или д К О,и осуществлять непрерывную корректировку коэффициента передачи К" регулируемого объекта в соответствии со следующималгоритмом:К" = К"( -г) Р -ф 3 д У здп дУхк здп д У(-т);где 8 - настроечный коэффициент, изменяющийся в диапазоне 0-1 и уточняемый впроцессе настройки и эксплуатации регулятора, д У( = У - У. С учетом последнего алгоритм функционирования предлагаемого регулятора будет иметь вид:л0 =0"(-т); О (- =О(- )+ " Р-У(,к"К" = К"(-4 (1 -Р д У 1) з 1 дп д Ух хз 1 дпд У(-тВд У - У - У,Устойчивость линейных прогнозирующих систем регулирования, к классу ко 15 торых относится и САР с предлагаемым регулятором общеизвестна, в том числе и для систем с внутренними положительными обратными связями,Добавление контура поднастройки коэффициента передачи канала регулирования не влияет на устойчивость САР в целом, так как предложенная процедура утончения этого коэффициента является сходящейся. Это наглядно видно из результатов моделирования, представленных на фиг, 2, При моделировании были приняты следующие значения коэффициентов передачи регулирующего канала:Кд = 2,0; К"(о) = 3 (случай а) фиг. 2);Ки(0) = 1 (случай б) фиг, 2).Применение моделирования для доказательства сходимости процедуры уточнения коэффициента передачи вызвано тем,что принятая процедура является нелинейной и затрудняет использование аналитичеРеализация алгоритма уточнения коэффициента передачи Косуществляется с помощью блока 6 управления моделью слеСигнал ошибки регулирования д У поступает с выхода измерителя рассогласования 1 на вход сигнум-реле 7, на выходе которого формируется сигнал, пропорциональный значению з 1 дп д У. Этот сигнал поступает на второй вход первого умножителя 9 и на вход элемента чистого запаздывания 8, формируя на выходе последнего сигнал, пропорциональный значению з 1 дп д У(- т ). Этот сигнал, поступая по первому входу в первый умножитель 9, умйожается там на сигнал, пропорциональный значению з 1 дп д У, формируя на выходе первого умножителя 9 сигнал, пропорциональный произведению з 1 дп д У з 1 дп д У( - ф который, проходя через масштабирующий элемент 10, образует на его выходе сигнал, пропорциональный значению р з 1 дп д У здп д У(- ф10 1789969 10 Одновременно с этим сигнал, пропорциональный ошибке регулирования д У(т), поступает с выхода измерителя рассогласования 1 на вход двухтактного детектора 11, выходной сигнал которого, пропорциональный 1 д У(т) 1, поступает по второму входу во второй умножитель 12. На первый вход второго умножителя 12 поступает сигнал с выхода масштабирующего элемента 10, который умножается на значение 1 д У(т)1, и на выходе элемента формируется сигнал, пропорциональный значению Р 3 дпд У(т) здп дУ(т-т)1 дУ(с)1, который поступает на первый вход элемента сравнения 13. На второй вход этого элемента сравнения поступает единичный сигнал с выхода источника постоянного сигнала 14. Таким образом; на входе элемента сравнения 13 формируется сигнал, пропорциональный значению (1 -ф здп д У(т) здп д У(т - г)1 дУ (т) Ц, который по первому входу поступает в третий умножитель 15, на второй вход которого поступает с выхода второго элемента чистого запаздывания 16 сигнал, пропорциональный значению К(1 - г), На выходе третьего умножителя 15 образуется сигнал, пропорциональный значениюК (т) = К (т - г),1 -/3з д и д У( т) хх здп д У(1-7) дУ(т)1),Формула изобретения Регулятор, содержащий измеритель рассогласования, подключенный выходом к информационному входу обратной модели объекта управления без запаздывания, соединенной выходом с первым входом сумматора, подключенного вторым входом к выходу блока чистого запаздывания, причем суммирующий и вычитающий входы измерителя рассогласования являются входами задания и регулируемой величины . регулятора, отличающийся тем, что,с целью повышения точности регулятора, в нем установлены блок управления моделью и экстраполятор, соединенный входом с выходом сумматора, а выходом - с входом блока чистого запаздывания, вход блока управления модель:о подключен к выходу измерителя рассогласования, а выход - к управляющему входу обратной модели объекта управления без запаздывания, причем блок управления моделью состоит из двухтактного детектора, источника постоянного сигнала и последовательно соединенных; сигнум-реле, первого элемента чистого за 15 20 25 30 который поступает на вход второго элемента чистого запаздывания 16 и на второй вход блока 2 обратной модели объекта без запаздывания, корректируя тем самым значение коэффициента передачи регулируемого объекта.Таким образом, точность регулирования повышается зэ счет того, что в блоке 6 управления моделью, состоящем из сигнум-реле 7,первого элемента чистого запаздывания 8,первого умножителя 9, масштабирующего, элемента 10, двухтактного детектора 11, второго умножителя 12, элемента сравнения 13, источника постоянного сигнала 14, третьего умножителя 15 и второго элемента чистого запаздывания 16, непрерывно осуществляется уточнение подверженного переменному дрейфу значения коэффициента передачи регулируемого объекта.Проверка эффективности работы системы регулирования с предлагаемым регулятором по сравнению с регулятором-прототипом показала (см. фиг. 2), что предлагаемый регулятор обеспечивает повышение точности функционирования системы регулирования по среднемодульному отклонению выхода объекта от задания в 1,3 раза и выше в зависимости от интенсивности изменения внешних возмущающих воздействий и времени запаздывания в канале регулирования. паздывания, первого умножителя; масштабирующего элемента, второго умножителя, элемента сравнения, третьего умножителя и второго элемента чистого запаздывания, подключенного выходом к второму входу третьего умножителя, суммирующий вход элемента сравнения соединен с выходом источника постоянного сигнала, вторые входы первого и второго умножителей соединены с выходами соответственно сигнум-реле и двухтактного детектора, входы которых соединены друг с другом и являются входом блока управления моделью, а выход третьего умножителя является выходом блока управления моделью, обратная модель объекта управления без запаздывания выполнена а виде делителя, входы которого "Делимое" и "Делитель" являются соответственно информационным и управляющим входами, а выход - выходом обратной модели объекта управления без запаздывания, выход экстрэполятора является выходом регулятора, а времена запаздывания блока и элементов чистого запаздывания равны времени запаздывания объекта управления, 17899691789969 оставитель Л. Мышляев хред М,Моргентэл дактор Т, Шагов Коррект Король Производственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 101 Заказ 349 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СС 113035, Москва, Ж, Раушская наб., 4/5
СмотретьЗаявка
4775763, 29.12.1989
СИБИРСКИЙ МЕТАЛЛУРГИЧЕСКИЙ ИНСТИТУТ ИМ. СЕРГО ОРДЖОНИКИДЗЕ, КУЗНЕЦКИЙ МЕТАЛЛУРГИЧЕСКИЙ КОМБИНАТ ИМ. В. И. ЛЕНИНА
АВДЕЕВ ВИТАЛИЙ ПАВЛОВИЧ, МЫШЛЯЕВ ЛЕОНИД ПАВЛОВИЧ, КОШЕЛЕВ АЛЕКСАНДР ЕВДОКИМОВИЧ, ЕВТУШЕНКО ВИКТОР ФЕДОРОВИЧ, НИКОЛАЕВСКИЙ ВАДИМ НИКОЛАЕВИЧ, КИСЕЛЕВ СТАНИСЛАВ ФИЛИППОВИЧ, ВЫГОДСКИЙ АНАТОЛИЙ ЭММАНУИЛОВИЧ
МПК / Метки
МПК: G05B 13/04
Метки: регулятор
Опубликовано: 23.01.1993
Код ссылки
<a href="https://patents.su/7-1789969-regulyator.html" target="_blank" rel="follow" title="База патентов СССР">Регулятор</a>
Устройство для диагностирования взаимосвязанных элементов объекта

Номер патента: 1500998
Опубликовано: 15.08.1989
МПК: G05B 23/02
Метки: взаимосвязанных, диагностирования, объекта, элементов
...подается лишь на секцик 3.1. Индикатор 9.2 индицирует отказ,Если в датчиках нет отказов, обусловленных ошибками 1-го рода, то при отключенных от объекта входных сигиа лах (Воэдеиствиях) на выходах датчиков, а значит, и на информационных входах 19-25 дешифратора образуется кодовая комбинация сигналов в виде 0000000 (все сигналы - логические ну, ли). При этом все диоды 50-56 матрицы становятся открытыми .от шины 47 питания через резисторы 57-63 и диоды 50- 55 к входам 19-25 дешифратора текут соответствующие токи, В результате паде-,1500998 40 ния напряжения на резисторах 57-63 навсех выходах 26-32 секции 3. 1 дешифратора образуются низкие (нулевые) потенциалы и индикаторы 4,1-4.7 отказов датчиков будут выключены. Поскольку питание на...
Телевизионное устройство для формирования сигнала изображения объекта

Номер патента: 1700764
Опубликовано: 23.12.1991
Авторы: Горячева, Гусаров, Нощенко, Ресин
МПК: H04N 5/232
Метки: изображения, объекта, сигнала, телевизионное, формирования
...к выходам соответствующих разрядов счетчика 82 импульсов, вход которого соединен с входом импульсов повышенной строчной частоты, а вход сброса - с входами установки регистров бб - 70, триггеров 77 - 81 и входом импульсов кадровой частоты. При этом входы установки триггеров 77-81 через диоды 83-86 присоединены к выходам счетчика 82.Телевизионное устройство работает следующим образом.Посредством наведения автоматически кли по командам с Земли совмещают наперед заданный участок" поля зрения с наблюдаемым астрономическим объектом планета, звезда, туманность к т,н). Объективом 3 через светофильтр 4 проецируют на люминесцентное покрытие 2 изображение наблюдаемого объекта. Одним кэ светоФильтров 4, устанавливаемых последовательно на оск...
Устройство для управления объектом с присоединенными упругодеформируемыми элементами

Номер патента: 1767476
Опубликовано: 07.10.1992
Авторы: Герасимов, Карагодин, Колчин, Плотников, Сясин
МПК: G05B 13/00
Метки: объектом, присоединенными, упругодеформируемыми, элементами
...передачи обьекта как "твердого тела" со ставляет1(о =-1 В (6) Знак основного управляющего момента на первом интервале определяется выражением45н 1 =/0819 п Чуч= - о 1 Оо о2 1(о ц 1(7)На первом этапе осуществления разворота обьекта с присоединенными УДЭ - эта пе ориентации - обьект управляется как "твердое тело" в соответствии с выражениями (3) - (7) при помощи основного управляющего органа; одновременно осуществляется частичное демпфирование 55 колебаний УДЭ при помощи вспомогательного управляющего органа, а имеНно сравнивается значение угловой скорости объекта у и угловой скорости модели обьекта как "твердого тела" ум, получаемая величина ошибки, вычисляемой как7 =7 - Ум (8) используется как управления объектом, При этом...
Устройство для измерения времени запаздывания сигнала в фотоприемниках

Номер патента: 883857
Опубликовано: 23.11.1981
Автор: Колесник
МПК: G04F 10/04
Метки: времени, запаздывания, сигнала, фотоприемниках
...обратной связи заьыкает ся излучением источника света, проходящим через оптический модулятор 2, оптическую линию 3 задержки и поступающим на фотоприемник 4. Однополосные смесители б и 8 с помощью О высокочастотного генератора позволяют произвести преобразование частоты автоколебаний, повышая ее в цепи обратной связи.Устройство работает следующим образом.При определенном значении коэффициента усиления широкополосного усилителя 7 выполняется условие само- возбуждения (условие амплитуд), и в контурной цепи, образованной оп тическим модулятором 2, оптической линией 3 задержки, Фотоприемником 4, аттенюатором 5, первым смесителем б, усилителем 7 и вторым смесителем 8, возникают автоколебания, модулирую- ,Я щие по интенсивности...
Селектор телевизионного сигнала подвижных объектов

Номер патента: 944152
Опубликовано: 15.07.1982
Авторы: Голушко, Кулешов, Хромов, Цыцулин
МПК: H04N 5/14
Метки: объектов, подвижных, селектор, сигнала, телевизионного
...Исходный видеосигнал текущего кадра ОВх(п),где и номер кадра, форма сигнала показанана фиг. 2 а (Тк время кадра), по р ступает на входы делителя 1, сумматора 2 и блока 3, форма напряжения на выходе сумматора 2, являющегося выходным напряжением селектора ОВЫ(п) показана на фиг. 2 б. Исходный видеосигнал и сигнал с выхода сумматора 235 после деления делителями 1 и 4 подаются на сумматор 5, форма сигнала на выходе которого Г(п) показана на фиг. 26. С выхода сумматора 5 видео 40 сигнал подается на блок 9 и на сумматор 10. Выходной сигнал сумматора 10 задерживается на кадр в блоке 6, форма напряжения на выходе которого Г(п) показана на фиг. 21. Этот сиг 45 нал инвертируется элементом НЕ 7 и подается на другой вход сумматора 2. При...
Предыдущий патент: Четырехканальный времяимпульсный преобразователь
Следующий патент: Многоканальное устройство управления шаговым двигателем
Случайный патент: Пневматический импульсный формирователь