Устройство нагружения металлоконструкции крана
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1784570
Авторы: Арецкин, Васин, Зарецкий, Погосян, Пустыльник



Текст
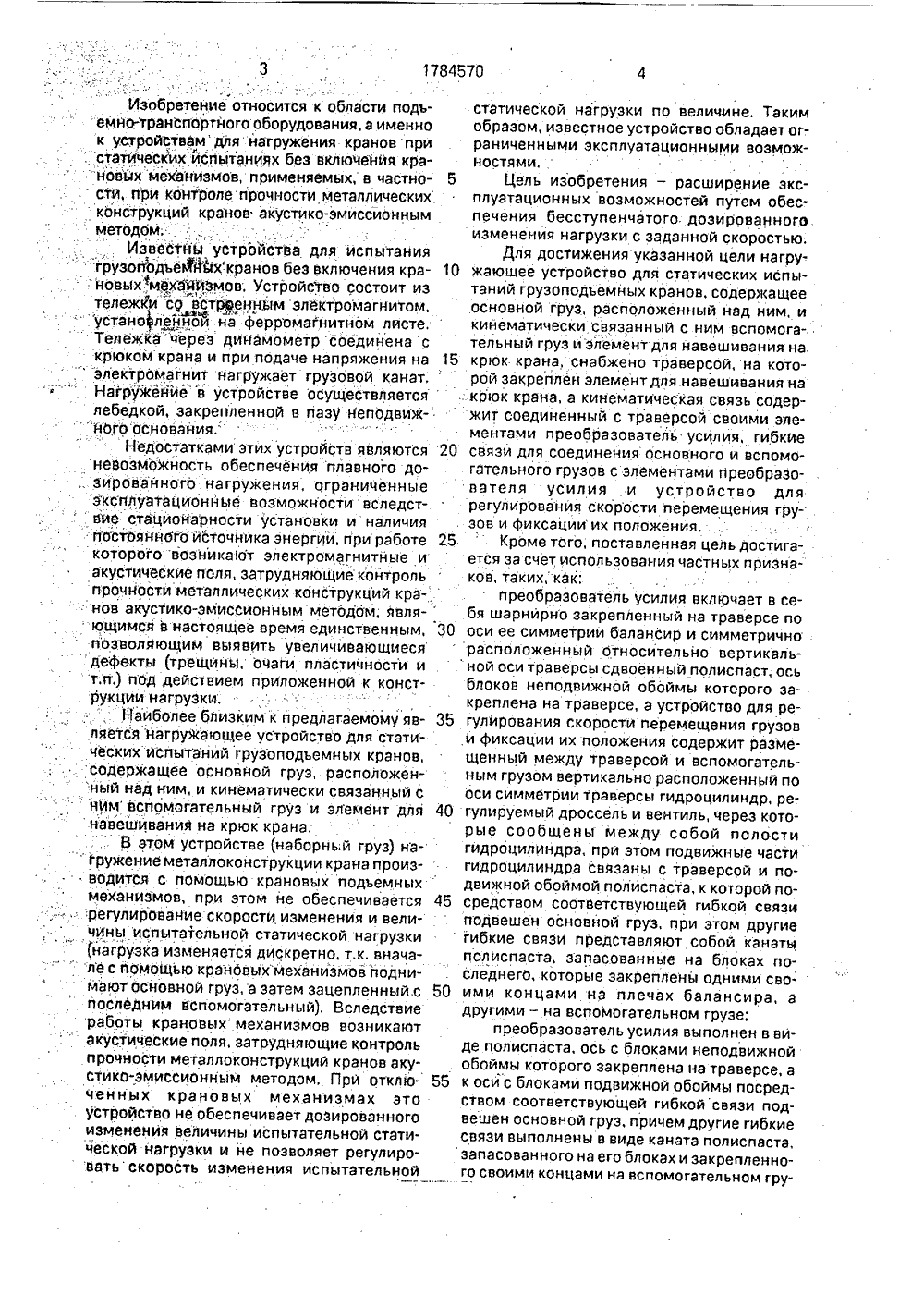
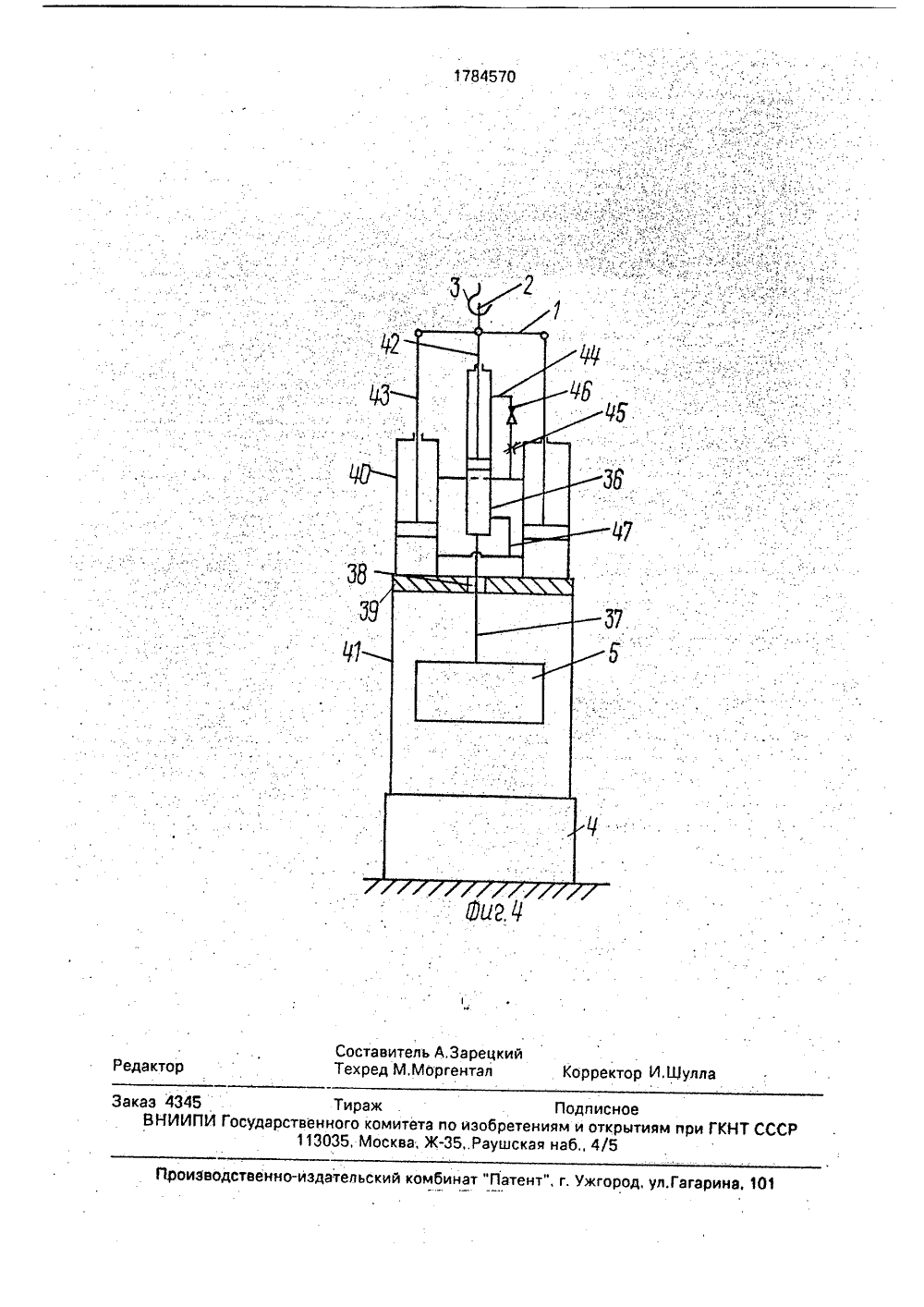
/О В 6 ГОСУДАРСТВЕННОЕ ПАТЕНТНВЕДОМСТВО СССР(ГОСПАТЕНТ СССР) ОЕЕ ИЗОБРЕТЕНИДЕТЕЛЬСТВУ ОПИСАН К АВТОРСКОМУ СВИ(21) 4717528/11. (57) Использование: подьемно-транспорт- (22) 11,07,89 .: - .: ", ное оборудование. Сущность устройство (46) 30,12.92. Бюл, В 48,: .:; . ".: . нагружения металлоконструкции крана со-(71) Московское научно-производственное держиттраверсу 1,накоторойзакрепленэлеобьединение по строительному и дорожно- мент 2 для навешивания на крюк 3 крана, му машиностроению: .-:, - сдвоенный полиспаст, ось блоков 7 непод-вижной обоймы которого закреплена на тра- (72) А.А. Зарецкий, Б,Г. Васин, М.М. Арец- версе 1, блоки 8 подвижной обоймы кин, С,Б. Погосян и М.Я. Пустыльнйк . соединены с корпусом гидроцилиндра 10, по-.(56) Авторское свидетельство СССР . лости которого сообщены между собой по- М 670847, кл. С 01 М 19/00, 1979; средством реглируемогодросселя 11, а штокАвторское свидетельство СССР 14 соединен с траверСой 1, основной груз 4, М 821391, кл. В 66 С 15/06, 1981, подвешенный на подвижной обойме указан- Авторскоесвидетельство СССР ного полиспаста, вспомогательный груз 5, сойт 1418276, кл. В 66 С 13/16,1987, ".: единенный с однйми концами канатов 15, полиспаста, и смонтированйый на траверсе 1 й4) УСТРОЙСТВО НАГРУЖЕНИЯ .МЕТАЛ- балансир 6, на плечах которого закрепленыКОНСТРУКЦИИ КРАНА, канаты 15 другими своими концами, 4 ил.4Изобретение относится к области подьемнр-трансйортного оборудования, а именнок устройствамдля нагружения кранов пристатйческаих йспытаниях без включенйя крановых механйзмов, применяемых, в частно стй, при контроле прочности металлическихконструкций кранов акустико-эмиссионнымметодом.Известйыс устройства для испытаниягрузопаодъемнйхкранов без включения кра: новыхфм 6 хайизмов; Устройсгво состоит изтележки ссо всатруеаннЬм электромагнитом,устанолеййси на фсарррмаГНнтнсм аастЕ,Тележка"чересз динамометр Соединена скрюком крана и при подаче напряжения на"электромагнит нагружает грузовой канат,Нагружение "в устройстве осуществляетсялебедкой, закрепленной в пазу неподвиж"ЙОго основания,Недостатками этйх устройств являютсяневозможность обеспечения плавного до зированного нагружения, ограниченныеэксплуатационные возможности вследстийЕ стацисойарности установки и наличияйорстояннтого йЬточника энергии, при работекоторого возникают электромагнитные иакустические поля, затрудняющие контрольпрочности металлических конструкций кра: нов акустико-эмиссионным методом; явля ющимся в настоящее время единственным,позволяющим выявить увеличивающиесядефекты (трещины, очаги пластичности ит,п,) под действием приложенной к конструкции нагрузки.Наиболее близким к предлагаемому является нагружающее устройство для статических испытаний грузоподъемных кранов,содержащее основной груз,. расположенный над ним, и кинематически связанный сйим всйомогательный груз и элемент длянавешивания на крюк крана.В этом устройстве (наборнь;й груз) нагружение металлоконструкции крана производится с помощью крановых подъемныхмеханизмов, при этом не обеспечиваетсярегулирование скорости изменения и величйны испытательной статической нагрузкинагрузка изменяется дискретно, т.к. вначале с помощью крановых механизмов поднимают Основной груз, а Затем ЗацеплЕнный.Споследним вспомогательный), Вследствиеработы крановых механизмов возникаютакустические поля, затрудняющие контрольпрочности металлоконструкций кранов акустико-эмиссионным методом, Прй отключенных крановых механизмах этоустройство не обеспечивает дозированногоизменений величины испытательной статической нагрузки и йе позволяет регулировать скорость изменения испытательной50 следнего, которые закреплены одними своими концами на плечах балансира, адругими - на вспомогательном грузе;преобразователь усилия выполнен в виде полиспаста, ось с блоками неподвижнойобоймы которого закреплена на траверсе, а к оси с блоками подвижной обоймы посредством соответствующей гибкойсвязи подвешен основной груз, причем другие гибкиесвязи выполнены в виде каната полиспастазапасованного на его блоках и закрепленного своими концами на вспомогательном грустатической нагрузки по величине, Таким образом, известное устройство обладает ограниченными эксплуатационными возможностями.5 Цель изобретения - расширение эксплуатационных возможностей путем обеспечения бесступенчатого. дозированного.изменения нагрузки с заданной скоростью.Для достижения указанной цели нагру жающее устройство для статических испытаний грузоподъемных кранов, содержащее основной груз, расположенный над ним, и кийематически связанный с ним вспомогательный груз и элемент для навешивания на 15 крюк крана, снабжено траверсой, на которой закреплен элемент для навешивания на крюк крана, а кинематическая связь содержит соединенный с траверсой своими элементами преобразователь усилия, гибкие 20 связи для соединения основного и вспомогательного грузов с элементами преобразователя усилия и устройство для регулирования скорости перемещения грузов и фиксации их положения.25Кроме того, поставленная цель достигается за счет использования частных признаков, таких, как:преобразователь усилия включает в себя шарнирно закрепленный на траверсе по 30 оси ее симметрии балансир и симметричнорасположенный относительно вертикаль ной оси траверсы сдвоенный полиспаст, осьблоков неподвижной обоймы которого закреплена на траверсе, а устройство для ре гулирования скорости перемещения грузови фиксации их положения содержит размещенный между траверсой и вспомогательным грузом вертикально расположенный по оси симметрии траверсы гидроцилиндр, ре гулируемый дроссель и вентиль, через которые сообщены между собой полости гидроцилиндра, при этом подвижные части гидроцилиндра связаны с траверсой и подвижной обоймой полиспаста, к которой по средством соответствующей гибкой связиподвешен основной груз, при этом другие гибкие связи представляют собой канаты полиспаста, запасованные на блоках по 1784570 6эе, а устройство для регулирования скорости перемещения грузов и фиксации их положения выполнено в виде тормоза, который установлен на оси неподвижной обоймы полиспаста, при этом крайние блоки неподвижной обоймы полиспаста закреплены на оси жестко;преобразователь усилия выполнен в виде двух связанных с траверсой своими осями поворота неравноплечих рычагов, . которые размещены под траверсой симметрично относительно вертикальной оси траверсы, а устройство для регулирования скорости перемещения грузов и фиксации их положения содержит вертикально расположенный по оси симметрии трэверсц и размещенный между рычагами и вспомогательным грузом гидроцилиндр, регулируемый дроссель и вентиль, через которые сообщены между собой полости гидроцилиндра, причем одна из подвижных частей гидроцилиндрэ соединена с траверсой, а другая подвижная часть гидроцилиндрэ соединена соответственно посредством первых гибких связей с меньшими плечами рычагов и второй гибкой связью - с основным грузом, при этом к большим плечам рычагов посредством третьих гибких связей подвешен вспомогательный груз;преобразователь усилия выполнен в виде трех вертикально расположенных гидро- цилиндров, штоки которых шарнирно связаны с траверсой, при этом к корпусу среднего гидроцилиндра меньшего диаметра посредством соответствующей гибкой связи подвешен вспомогательный груз, э к корпусам крайних гидроцилиндров большего диаметра, которые жестко связаны между собой, посредством других гибких связей подвешен основной груз, причем одноименные полости гидроцилиндров сообщены между собой, а устройство для регулирования скорости перемещения грузов и фиксации их положения выполнено в виде регулируемого дросселя и вентиля, установленных последовательно в одной иэ линий связи одноименных полостей гидроцилиндров.Нафиг,1,2,3,4 схематично показано нагружающее устройство в рабочем положении, выполненное соответственно по первому, второму, третьему и четвертому вариантам.Нагружающее устройство (фиг.1,2,3,4) для статических испытаний грузоподьем-.нцх кранов содержит траверсу 1 с элементом 2 для навешивания на крюк 3 крана. С траверсой 1 кинематически связаны основной 4 и вспомогательный 5 грузы, Вспомо 40 50 перепускном трубопроводе 13, сообщающем полости гидроцилиндра 10,Шток 14 гидроцилиндра 10 связан страверсой 1. Нижнее основание корпуса гидроцилиндра 10 связано с подвижной обоймойполиспаста. Канаты 15 полиспаста, представляющие собой другие гибкие связи, одними своими концами закреплены на балансире 6, адругими - на вспомогательном грузе 5 и запэсованы на блоках 7,8 полиспаста. Во вспомогательном грузе 5 выполнено отверстие 16, в которое проходит гибкая связь 9.В нагружающем устройстве по второму варианту (фиг.2) преобразователь усилия выполнен в виде полиспаста, э устройстводля регулирования скорости перемещения грузов и фиксации их положения выполнено в виде механического тормоза.Крайние блоки 17 неподвижной обоймыполиспаста и диск тормоза 18 закрепленыжестко на оси 19, установленной в опорах траверсы 1, Балансирный блок 20 вращаетгательный груз 5 имеет массу меньше, чем основной груз 4.Кинематическая связь основного 4 ивспомогательного 5 грузов с траверсой 1 5 обеспечивает возможность их взаимноговертикального перемещения друг относительно друга и относительно траверсы 1 с регулируемой скоростью; Кйнематическая связь обеспечивает также возможность 10 фиксаций положения грузов 4 и 5. Подъемосновного груза 4 большей массы осуществляется за счет накопленной при подъеме потенциальной энергии вспомогательного груза 5 меньшей массы и за счет того, что 15 кинемэтическая связь содержит преобразователь усилия. Основной 4 и вспомогательный 5 грузы связаны с элементами преобразователя усилия с помощью гибких связей. Кинематическая связь также вклю чает в себя устройство для регулированияскорости перемещения грузов 4 и 5 и фиксации их положения.В нагружающем устройстве по первомуварианту (фиг,1) преобразователь усилия 25 включает в себя шарнирно закрепленный натраверсе 1 балансир 6 и симметрично расположенный относительно вертикальной оси симметрии сдвоенный полиспаст, Ось блоков 7 неподвижной обоймы полиспаста 30 закреплена на траверсе 1, а к оси с блоками8 подвикной обоймы полиспаста посредст 4вом гибкой связи 9 подвешен основной груз 4. Устройство для регулирования скорости перемещения грузов 4 и 5 и фиксации их 43 положения выполнено в аиде гидроцилиндра 10 (гидротормоз), регулируемого дросселя 11 и вентиля 12, которые установлены в5 10 15 20 25 30 35 40 50 ся на оси 19 свободно, К основанию блоков21 подвижной обоймы подвешен на гибкойсвязи 22 основной груз 4, Канат 23 полиспаста, представляющий собой другие гибкиесвязи, обоими концами закреплен йа вспомогательном грузе 5 и запасован на блоках17,20,21 полиспаста, Во вспомогательномгрузе 5 выполнено отверстие 24, в котороепропущена гйбкая связь 22.В нагружающем устройстве по третьемуварианту (фиг.З) преобразователь усилиявыполнен в виде двух неравноплечих рычагов 25, Неравноплечие рычаги 25 расположены под траверсой 1 симметричноотносительно ее вертикальной оси и связаны с ней своими осями поворота. Меньшиеплечи рычагов 25 соединены первыми гибкими связями 26 с нижней балкой 27, накоторой закреплено нижнее основание корпуса гидроцилиндра 28. К нижней балке 27посредством второй гибкой связи 29 подвешен основной груз 4. К большим плечамрычагов 25 посредством третьих гибких связей 30 подвешен вспомогательный груз 5.Вспомогательный груз 5 выполйен с отверстием 31 для гибкой связи 29, Гидроцилиндр28 расположен вертикально по оси симметрии траверсы 1, Шток 32 гидроцилиндра 28связан с траверсой 1, Перепускной трубопровод 33 с регулируемым дросселем 34 ивентилем 35 соединяет полости гидроцилиндра 28, Устройство для регулированияскорости перемещения грузов и фиксацииих положения включает в себя гидроцилиндр 28 (гидротормоз), регулируемыйдроссель 34 и вентиль 35,В нагружающем устройстве по четвертому варианту (фиг.4) преобразователь усилия включает в себя три вертикальнорасположенных гидроцилиндра, Корпуссреднего гидроцилиндра 36 меньшего диа" метра соединен со вспомогательным грузом5 гибкой связью 37, проходящей в отверстие38 нижней балки 39, Корпусы двух другихкрайних гидроцилиндров 40 большего диаметра прикреплены к нижней балке 39, которая другими гибкими связями 41соединена с основным грузом 4.Нижняя балка 39 жестко связываетмежду собой корпуса крайних гидроцилиндров 40. Штоки 42,43 гидроцилиндров шарнйрно соединены траверсой 1,Штоковые полости гидроцилиндров соединены между собой перепускным трубопроводом 44, снабженным регулируемымдросселем и вентилем 46. Поршневые полости гидроцилиндров соединены между собой перепускным трубопроводом 47.Регулируемый дроссель 45 и вентиль 46, последовательно установленные в линии свяэи (трубопроводе) 44, образуют. устройство для регулирования скорости перемещения грузов 4 и 5 и фиксации их положения.Нагружающие устройства, изображенйые на фиг.1,3,4, снабжены приспособлениями для компенсации разницы обьемов штоковых и поршневых полостей гидроцилиндров (на чертежах не показаны), т.к, при одинаковыхперемещениях поршней штоковых и поршневых полостей гидроцилиндров вытесняются разные объемы жидкости, Устройства для компенсации разницы объемов. выполнены в виде емкостей с рабочей жидкостью, присоединенных к соответствующим полостям гидроцилиндров.Нагружающее устройство, изображенное на фиг.1, работает следующим образом;Вентиль 12 закрыт, С помощью грузо- подъемного механизма крана поднимают нагружающее устройство так, чтобы основной груз 4 оставался на земле и гибкая связь 9 не была бы натянута, а вспомогательный груз 5 был поднят, Затем отключают крановые механизмы и открывают вентиль 12,При открытом вентиле 12 перепускного трубопровода жидкость вытесняется иэ надпоршневой полости в подпоршневую полость гидроцилиндра 10 со скоростью. зависящей от размера отверстия регулируемого дросселя 11, вспомогательный груз 5 опускается, подвижная обойма с корпусом гидроцилиндра 10 поднимается, натягивая гибкую связь 9 вплоть до отрыва основного груза 4 от земли, Подъем основного груза 4 может продолжаться до тех пор, пока он не придет в соприкосновение с вспомогательным грузом 5,Возврат нагружающего устройства в исходное положение осуществляется с помощью грузоподьемного механизма кранаКрюк 3 опускается до тех пор, пока грузы 4 и 5 не окажутся на земле, а гибкая связь 9 ц канаты 15 не получат достаточную слабину, Под действием веса подвижной обоймы блоков 8 и гидроцилиндра 10 полиспаст растягивается до нужного размера, Затем вентиль 1 перепускного трубопровода 13 перекрывается, и нагружающее устройство поднимаетсщ краном в исходнбе положение.Нагружающее устройство, изображенное на фиг,2, работает следующим образом,Тормоз 18 закрыт. С помощью грузо- подъемного механизма крана поднимают нагружающее устройство так, чтобы основной груз 4 оставался на земле игибкая связь 22 не была бы натянута, а вспомогательный груз 5 был поднят. Затем отключают, крано-. вые механизмы и раскрывают тормоз 18.При раскрытом тормозе 18 вспомогательный груз 5 опускается, подвижная обой1784570 20 25 30 40 50 55 9ма полиспаста поднимается, натягивая гибкую связь 22 вплоть до отрыва осйовного груза 4 от земли. Подъем основного груза 4 может продолжаться до тех пор, пока он не придет в соприкосновение с вспомогательным грузом 5,Возврат нагружающего устройства в ис ходное положение осуществляется с помощью грузоподьемного механизма крана,Крюк 3 опускается до тех пор, пока грузы 4 и 5 не окажутся на земле, а гибкая связь 22 и канат 23 не получат достаточную слабину. Под действием веса подвижной обоймы блоков 21 полиспаст растягивается при открытом тормозе 18 до нужного размера, Затем ось 19 затормаживается и нагружающее устройство поднимается краном в исходное положение.Нагружающее устройство, изображенное на фиг,3, работает следующим образом,Вентиль 35 закрыт. С помощью грузо- подъемного механизма крана поднимают нагружающее устройство так, чтобы основной груз 4 оставался на земле и гибкая связь 29 не была бы натякута, а вспомогательный груз 5 был поднят. Затем отключают крановые механизмы и открывают вентиль 35,При открытом вентиле 35 перепускного трубопровода 33 жидкость вытесняется из надпоршневой полости в подпоршневую полость гидроциликдра 28 со скоростью, зависящей от размера отверстия регулируемого дросселя 34, вспомогательный груз 5 опускается, нижняя балка 27 поднимается,натягивая гибкую связь 29 вплоть до отрыва основного груза 4 от земли, Подъем основного груза 4 может продолжаться до тех пор, пока он не придет в соприкосновение с вспомогательным грузом 5,Возврат нагружающего устройства в исходное полокение осуществляется с помощью грузоподъемного механизма крана. Крюк 3 опускается до тех пор, пока грузы 4 и 5 не окажутся на земле, а гибкие связи 26 и 30 не получат достаточной слабины, Под действием веса нижней балки 27 и гидроцилиндра 28 произойдет выдвижение штока 32 на нужную длину. Затем вентиль 35 перепускного трубопровода 33 перекрывается и нагружающее устройство поднимается краном в исходное положение, Нагружающее устройство, изображенное на фиг,2, работает следующим образом, Вентиль 46 закрыт. С помощью грузоподъемного механизма крана поднимают нагружающее устройство так, чтобы основной груз 4 оставался на земле и гибкие связи 41 не были бы натянуты, а вспомогательный груз 5 был поднят, Затем отключают крановые механизмы и открывают вентиль 46,При открытом вентиле 46 перепускного трубойровода 44 жидкость вытесняется из штоковой полости среднего гидроцилиндра 36 в штоковые полости крайних гидроцилиндров 40. Йри этом вспомогательный груз 5 опускается, а нижняя балка 39 поднимается, натягивая гибкие связи 41 вплоть до отрыва Основного груза 4 от земли, Жидкость иэ поршневых полОстей крайних гидроцилиндров 40 по перепускному трубопроводу 47 вытесняется в поршневую полость среднего гидроцилиндра 36. Скорость подъема нижней балки 39 зависит от размера отверстия регулируемого дросселя 45 в перепускном трубопровоце 44. Подъем основного груза 4 может продолжаться до тех пор, пока он не придет в соприкосновение с вспомогательным грузом 5.Возврат нагружающего устройства в исходкое положение осуществляется с помощью грузоподъемного механизма крана, Крюк 3 опускается до тех пор, пока грузы 4 и 5 ке окажутся на земле, а гибкие связи 37 и 41 ке получат достаточной слабины, Вентиль 46 открыт. Под действием веса нижней балки 39, гидроцилиндров 36 и 40 произойдет выдвижение штоков 42,43 на нужную длину, Затем вентиль 46 перепускного трубопровода 44 перекрывается и нагрукающее устройство поднимается краном в исходное положение, Кратность полиспаста в устройстве (фиг.1,2), соотношения плеч рычагов (фиг,3) и соотношения диаметров в устройстве (фиг.4) выбираются такими, чтобы обеспечить подъем основного груза большей массы за счет потенциальной энергии вспомогательного груза меньшей массы,сЬормула изобретения Устройство нагружения металлоконструкции крана, содержащее основной груз, расположенный над ним и кинематически связанный с ним вспомогательный груз и элемент для навешивания на крюк крана, о т л и ч а ю щ е е с я тем, что, с целью расширения эксплуатационных возможностей путем обеспечения бесступен атого изменения нагрузки с заданной скоростью без включения механизмов крана, оно снабжено траверсой, на которой закреплен элемент для навешивания на крюк крана, а указанная кинематическая связь включает в себя гибкую тягу, преобразователь усилия, выполненный в виде закрепленного на траверсе по оси ее симметрии балансира и симметрично расположенного относительно вертикальной оси траверсы сдвоенного полиспаста, ось блоков неподвижной обоймы которого закреплена на траверсе, и устройство для регулирования скорости перемещения грузов и фиксации их положения,выполненное в виде размещенного между траверсой и вспомогательным грузом вертикально"расположенного по оси симметрии травврсы гидроцилиндра с регулируемым дросселем и вентилем, через которые сообщены между собой полости гидроцилиндра, при этом подвижные части гидроцилиндра связаны с траверсой и с подвижной обоймой полиспаста, к которой посредством гибкой тяги подвешен основной груз, а канаты полиспаста, запасованные на 5 его блоках, закреплены одними концами наплечах балансира, а другими - на вспомогательном грузе."Составитель А.Зарецкийедактор Техред М.Моргентал Корректор И Шказ 4345 Тираж ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при Г113035, Москва, ЖРаушская наб., 4/5Производственно-издательский комбинат "Патент". г. Ужгород, ул.Гагарина,
СмотретьЗаявка
4717528, 11.07.1989
МОСКОВСКОЕ НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ ПО СТРОИТЕЛЬНОМУ И ДОРОЖНОМУ МАШИНОСТРОЕНИЮ
ЗАРЕЦКИЙ АНАТОЛИЙ АБРАМОВИЧ, ВАСИН БОРИС ГЕОРГИЕВИЧ, АРЕЦКИН МАРК МИХАЙЛОВИЧ, ПОГОСЯН САСУН БЕНИАМИНОВИЧ, ПУСТЫЛЬНИК МИХАИЛ ЯКОВЛЕВИЧ
МПК / Метки
МПК: B66C 15/06
Метки: крана, металлоконструкции, нагружения
Опубликовано: 30.12.1992
Код ссылки
<a href="https://patents.su/7-1784570-ustrojjstvo-nagruzheniya-metallokonstrukcii-krana.html" target="_blank" rel="follow" title="База патентов СССР">Устройство нагружения металлоконструкции крана</a>
Устройство для взвешивания грузов на кране

Номер патента: 1244078
Опубликовано: 15.07.1986
Авторы: Богдан, Закута, Кишко, Лозенко, Санкин, Терновой, Шмигельский
МПК: B66C 13/16, G01G 19/14
Метки: взвешивания, грузов, кране
...преобразователи 13. Тяга 3 закреплена на грузо- приемной пластине 8 при помощи гайки 14 и застопорена контргайкой 15. Тензорезисторный датчик закрыт кожухом 16.Функциональная измерительная схема со держит тензомосты 17 - 20, образованные тензорезисторными преобразователями 13 каждой грани динамометрического элемента и подключенные к блоку 21 питания, а их выходы соединены последовательно. Выход тензорезисторного датчика подключен к входу усилителя 22 сигнала, выход которого через дифференциальный усилитель 23 связан 4 с входом аналого-цифрового преобразователя 24. Выход преобразователя 24 связан с резистором 25 памяти и блоком 26 управления цифровым индикаторным табло 27.Выход резистора 25 памяти через цифроаналоговый...
Устройство для сопряжения основной и вспомогательной цифровых вычислительных машин

Номер патента: 744588
Опубликовано: 30.06.1980
Авторы: Бучельников, Гордон, Гришин, Матвеев, Никифоров, Сидоров, Смирнов, Соломатин
МПК: G06F 15/16
Метки: вспомогательной, вычислительных, машин, основной, сопряжения, цифровых
...в направлении обеих ЦВМ, блок8 управления устройством сопряжения,организующий работу блоков устройства, блоки 9 и 9 прерывания, дешифратор 10 команд вспомогательной ЦВМ2, регистр 11 адреса, принимающий адреса от вспомогательной ЦВМ 2, и регистр 12 адреса, принимающий адресиз селекторного канала 4 основнойЦВМ 3, схему 13 сравнения указанныхадресов. Устройство 5 сопряжения содержит и дешифратор 14 адресов, блок15 запоминания адресов и команд основной ЦВМ 3, выполненный в виде наборарегистров, в каждый из которых заносится команда в соответствии с приоритетом, определяемым командами вспомогательной ЦВМ, поступающими на коммутатор 16 и дополнительный коммутатор17, предназначенный для передачи адреса запроса в основную ЦВМ 3 в...
Способ измерения веса поднимаемого груза в кранах с турбопередачей в приводе

Номер патента: 120318
Опубликовано: 01.01.1959
Автор: Николаев
МПК: B66C 13/16
Метки: веса, груза, кранах, поднимаемого, приводе, турбопередачей
...наматьвается грузовои канат д. На двигателе 1 ыонтирован датчик б числа оборотов его вала, связанный с указателем 7 числа оборотов, размегценным ца пульте управления 8, па котором также расположены рукоятка 9 для регулирования числа оооротов двигателя 1 и указатель 10 вылета, связанный со стрелой 11, Указатель 7 числа оборотов двигателя имеет шкалу, отградуированную как в числах оборотов вала двигателя, так и в единицах веса поднимаемого краном груза. На шкале указателя 10 вылета нанесены величины вылетов крюка и значения соответствующих этим вылетам весов поднимаемого груза.Для определения веса поднятого краном груза вращением рукоятки 9 устанавливают такое число оборотов вала двигателя 1, чтобы груз, а следовательно, и ведомый...
Устройство для сопряжения основной и вспомогательных цифровых вычислительных машин

Номер патента: 437075
Опубликовано: 25.07.1974
Авторы: Кривоносов, Мямлин, Мячев, Сильвинский, Требушной
МПК: G06F 15/16
Метки: вспомогательных, вычислительных, машин, основной, сопряжения, цифровых
...разрядов маски после получения сигнала Ответ на прерывание формируется сигнал прерывания основной машины, который через шину 32 поступает,в машину МО. 15Управляющая программа машины МО организует считывание разрядов РПМ блока 1, которые поступают по шине 33 считывания информации в вычислительное устройство машин МО, Г 1 осле анализа разрядов РПМ уп равляющая программа машины МО организует выдачу команды передачи информации в машину М 1. Номер вспомогательной машины и указание о направлении передачи информации поступают по кодовым шинам 34, 25 а сигналы сопровождения команды - по шине 35 в блок 4.При передаче информации из машины МО в машину М 1 блок 4 посредством шины 4, разрешает:по первому управляющему,входу 30 прием информации из...
Устройство для фиксации положения груза на кране

Номер патента: 554200
Опубликовано: 15.04.1977
Авторы: Воробьев, Ганпанцуров, Гулько
МПК: B66C 13/04
Метки: груза, кране, положения, фиксации
...штуцер 14,ири этом пружина 17, воздействуя на поршень9, выводит конус 11 штока 10 из конического30 отвсрстия ь зубе 6. Г 1 оследиий действиемпружины 13 входит в зацепление с упорными зубьями 8 рейки 7 и при подъеме груза взаимодействует с ними как трещетка. При необходимости остановки груза в промежуточном положении переключают кран управления в нейтральное положение, прекращая подачу сжатого воздуха в штоковую полость пневмоцилиндра. В результате этого давление в пневмоцилиндре падает и зуб 6 стопора 5, упираясь в один из зубьев 8 рейки 7, удерживает 10 шток 1 от перемещения на опускание груза, Аналогично фиксируется поднимаемый груз и в случае падения давления сжатого воздуха в общей магистрали (на фигурах не показана). 15Для...
Предыдущий патент: Система управления гидропривода лебедок сдвоенного крана
Следующий патент: Многопозиционный механизм управления рабочими органами сельскохозяйственной машины
Случайный патент: Вибролоток для ориентированной загрузки мелких деталей