Система программного управления угледобывающим комбайном
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1610002
Авторы: Бордзиловский, Долинный, Злодеев, Котлярский, Ревякин, Синенко, Турицын
Текст
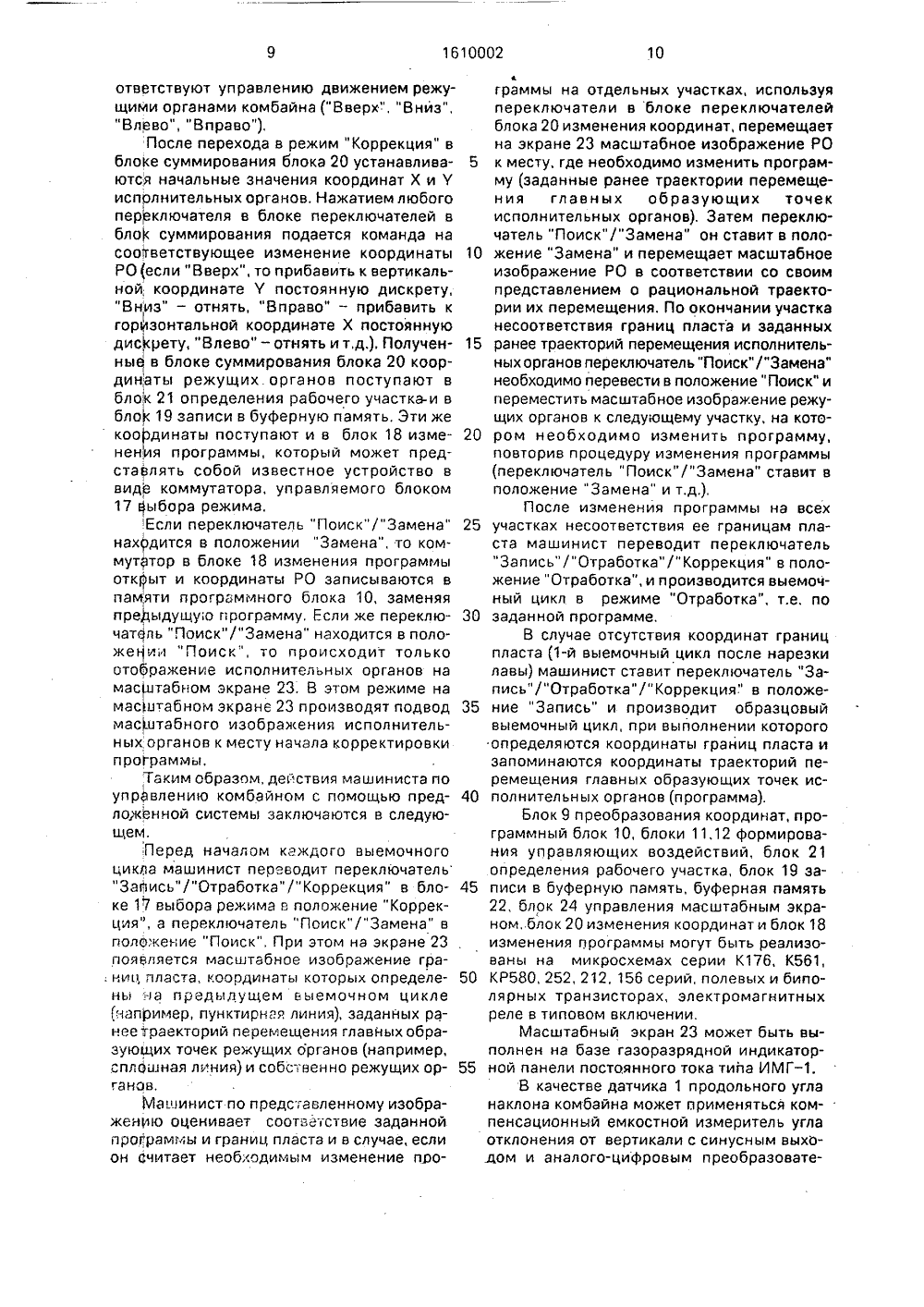
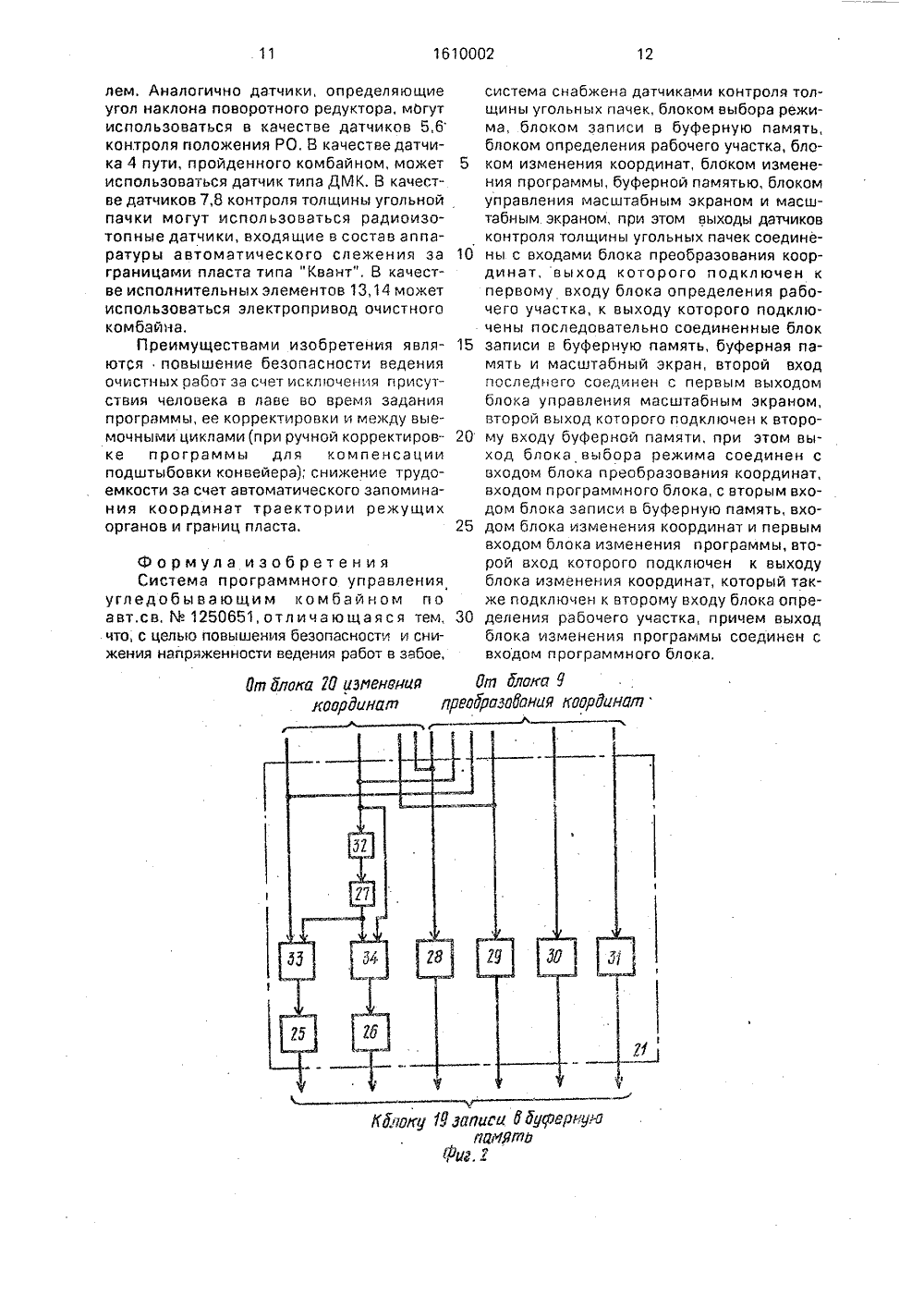
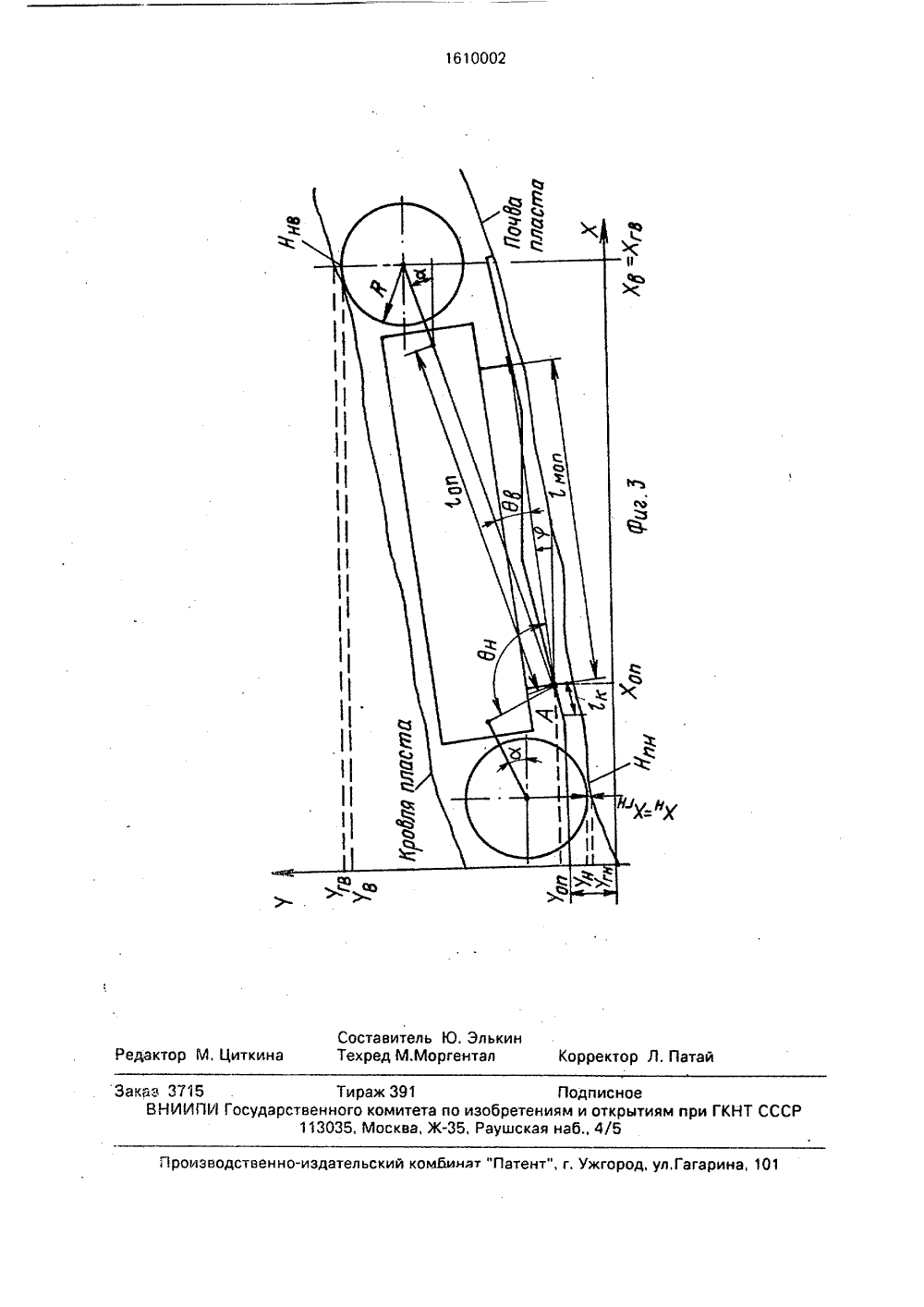
1610002 30 40 датчика 4 пути подключен к входу счетчика 3, выход которого соединен с входом счетчика 3, выход которого подключен к входу элемента 2 памяти, По концам конвейера располокены концевые выклочатели 15 и 16, выходы когоаых соединены с элементом 2 памяти, Система также содержит блок 17 выбора режима, соединенный с блоком 9, с ПБ 10, блоком 18 изменения программы, блоком 19 записи в буферную память и блоком 20 изменения координат, выход которого подключен к входам блока 18 и блока 21 определения рабочего участка. Блок 21 через блок 19 и буферную память 22 свяИзобретение относится к угольной промышленности, предназначено для автоматического управления режущими (исполнительными) органами РО) угольного комбайна и является усовершенствованием устройства по авт.св. М 1250651,Цель изобретения - повышение безопасности и снижение напряженности ведения работ в забое.На фиг, 1 изображена структурная схема системы программнога управления; на фиг, 2 - функциональная схема блока определения рабочего участка; на фиг. 3 - участок конвейерного става и очистной комбайн с верхним и нижним РО, там же показаны координаты главных образующих точек РО и координаты границы порода - уголь в условно-неподвижной системе коарринат с центром в начале движения комбайна,В систему программного управления фиг.1) входят датчик 1 угла продольного наклона комбайна, элемент 2 памяти, счетчик 3, датчик 4 пути, пройденного комбайнам, датчики 5 и 6 контроля положения соответственно верхнего и ни;кнего РО, датчики 7 и 8 контроля толщины соответственно веохней и нижней угольных пачек. Эти датчики расположены на комбайне. Выходы датчиков 1 и 4-8 и элемента 2 памяти соединены с входом блока 9 преобразования координат, выходы которого через программный блок 10 и соответствующие блоки 11 и 12 формирования управляющих сигналоа соединены с соответствующими входами исполнительных элементов 13 и 14, Выход датчика 4 пути подключен к входу счетчика 3, выход которого соединен с входом элемента 2 памяти, Выходы концевых выключателей 15 и 16, расположенных по концам скребковага конвейера, соединены зан с масштабным экраном 23, связанным с блоком 24 управления им. При этом выход блока 9 соединен с входом блока 21, а выход блока 18 подключен к ПБ 10. В результате работы системы на экране 23 появляется изображение границ пласта, координаты которых определены на предыдущем выемочном цикле заданных траекторий перемещения РО и собственно РО, Машинист К, перемещая на экране изображения РО или заданных траекторий РО, может вносить необходимые изменения в программу отработки предстоящего выемочного цикла. 3 ил,с элементам 2 памяти, Система также содержит блок 17 выбора режима, соединенный с блоком 9 преобразования координат, с программным блоком 10, блоком 18 изменения программы, блоком 19 записи в буфернуо память и блоком 20 изменения координат, выход которого подключен к входам блока 18 изменения программы и блока 21 определения рабочего участка. Блок 21 определения рабочего участка через блок 19 записи в буферную память и буферную память 22 связан с масштабным экраном 23, связанным с блоком 24 управления масштабным экраном, который, в свою очередь, подключен к буферной памяти 22, причем выход блока 9 преобразования координат соединен с входом блока 21 определения рабочего участка, а выход блока 18 изменения программы связан с программным блоком 10.Блок 17 выбора режима представляет собой набор переключателей; переключатель "Записью "Отработка" / Коррекция", кнопку "Сброс" и переключатель "Поиск" /" Замена". Блок 18 изменения программ может представлять собой управляемый коммутатор,Блок 19 записи в буферную память может представлять собой известное соединение блока управления, блока записи текущего положения, блока записи исходной информации и блока хранения исходной информации.Блок 20 изменения координат представляет собой соединение блока переключателей и блока суммирования,Устройство блока 21 определения рабочего участка поясняется фиг,2, В его состав входят: элементы 2531 умножения на постоянный коэффициент, элемент 32 делениябез остатка, элементы 33,34 вычитания, 1610002Система программного управления комбайном имеет три режима работы;"Запись", "Отработка", "Коррекция". В режимах "Запись" и "Отработка" система рабОтает следующим образом,,Во время движения угледобывающего комбайна с выхода датчика 1 сигналы, пропорциональные углу продольного наклона комрайна, поступая на вход элемента 2 памяти. Одновременно с выхода датчика 4 пути 1 а вход счетчика 3 поступают сигналы, квантованные по пути с шагом, например, 0,1 м. В счетчике 3 они подсчитываются и приколичестве импульсов, пропорциональном, расстоянию между опорами комбайна, счетчик переполняется и обнуляется. При этом с выхода счетчика 3 на вход элемента 2 памяти поступает сигнал, по которому информация из последнего заносится в блок 9 преобразования координат, а в самоь элементе 2 памяти происходит стирание ранее имевшейся информации и запись сигнала с выхода датчика 1 продолейного угла наклона комбайна, 8 начале движения комбайна от одного из штреков по сигналу одного из концевых выключателей 15,16 в элементе 2 памяти происходит первая запись информации об угле продольного наклона комбайна. Сигналы с выходбв датчиков 1, 4 - 8., элемента 2 памяти поступают на входы блока 9 преобразования, координат, в котором производится пересчет показаний датчиков в координаты главных образующих точек режущих органов комбайна и координат границ поррда-уголь в условно-неподвижной систем координат с центром.в начале движения комбайна на сопряжении лавы со штреком, При этом положение любой точки комбайна относительно начала координат (фиг.З) определяется как сумМа положений этой точки относительно одной из опор комбайна, например опоры А, и этой опоры относительно начала координат, и вычисляется по формулам (знак "+"используется при вычислении коордрнат верхнего РО и верхней границы порда - уголь, знак "-" соответственно для нижних РО и границы):+ О соз ( О+ р) Д соз а; Х, = Х,где Х,У - соответственно горизонтальная ивертикальная координаты главных образую 5 щих точек режущих органов (фиг.З);Уг,Хг - соответственно горизонтальнаяи вертикальная координаты границы порода-уголь;Уо - расстояние от верхней полки кон 10 вейера до почвы пласта в том из сопряжений лавы со штреком, откуда было начатодвижение;Н - толщина оставляемой угольнойпачки под или над исполнительными орга 15 нами;оп - длина проекции расстояния между опорами комбайна на его продольнуюось;- разность пути, пройденного комбай 20 ном, и суммы целого числа длин проекцийрасстояния между опорами на продольнуюось комбайна, укладывающихся на длинепройденного пути;рф - угол и родол ь ного наклона корпу 25 са комбайна при равенстве нулю,уф - последний зафиксированный рфоп - расстояние между опорой, положение которой контролируется, и геометрическим центром опоры поворотного30 редуктора соответствующего РО;О - угол наклона прямой, соединяющей опору, положение которой контролируется, и геометрический центр опорыредуктора, к продольной оси комбайна;35 р - угол продольного наклона корпусакомбайна;а - угол наклона прямой, соединяющейгеометрические центры РО и опоры поворотного редуктора;40 д - длина прямой, соединяющей геометрические центры РО и опоры поворотного редуктора;К - радиус шнека.При определении координат главнойобразующей точки верхнего режущего органа и кровли пласта всем переменным присваивается индекс "В", а для нижнего органаи почвы пласта - индекс "Н" (фиг.З),Блок 9 преобразования координат состоит из канала определения координатверхнего РО и верхней границы породауголь и аналогичного канала определениянижних координат, Каждый канал представляет собой известное соединение сумматоров, элементов умножения синусныхи косинусных преобразователей, накапливающих сумматоров, ключевых элементов исчетчика, обеспечивающих выполнение ма 1610002тематических операций в соответствии с представленными формулами,Сигналы, пропорциональные координатам Хг и Уг границ пласта, фиксируются в памяти программного блока 10. Сигналы, пропорциональные координатам Х и У каждого исполнительного органа, в рекиме "Запись" также сриксируются в памяти программного блока 10, В режиме "Отработка" (при отааботке программы) в программном блоке 10 производится сравнение текущих и зафиксированных ранее (в режиме "Запись" ) значений координаты У при равенстве соответствующих величин Х.Сигналы рассогласования, пропорцианал ьые раз с:сти зафи кси рова ных координат нижнего и верхнего режущих органов, поступзот на входы соответствующих блоков 11, 12 формирования управляащих сигналов, Они представляют собой последовательные соединения порогового устройства, ждущего мультивибратора и схемы умножения на знаковую функцию входного рассогласования, При достижении рассогласованием текущих и зафиксированных координат величины, равной шагу отааботки, срабатывает пороговое устройство, и по ега сигналу ждущий мультивибратар Формирует импульс, длительность которого пропорциональна шагу отработки, Этот импульс умножается на знаковую функцию рассогласования текущих и зафиксированных координат и поступает на входы соответствующих исполнительных элементов 13, 14, которые и осуществлягот перемещение режущих органов.Одновременна с этим сигналы, пропорциональные Х и У каждого РО и Хг и Уг границ пласта, полученные в блоке 9 преобразования координат, поступают в блок 21 определения оабочего участка (фиг.2).Блок 21 определения рабочего участка работает следующим образом,Сиг.-;злы, пропорциональные вертикальным кОардинзтам У кзКДОГО режущего органа и Уг границ пласта, пастугсают на входы элементов 28 - 31 умножения. на пОстаянный коэффициент, где гласштабируются. Сигнал, пропорциональный горизонтальной координате Х нижнеГО РО, поступает на вход элемента 32 деления без остатка на величину, прапорциональнуа длине отображаемого на масштабном экране 23 участка лавы, Выход элемента 32 соединен с элементом 27 умножения на величину,пропорциональную длине отображаемого у.астка, причем выход последнего соединен с входами элементов Вычитания 33 и .4, на другие Входы кОторых падаготся сиГналы, прапор 5 10 15 20 25 30 35 40 50 55 циональые горизонтальным координатам соответствующих РО. Разностные сигналы подаются на входы элементов 25, 26 умнокения, где масштабируются, Далее масштабные величины координат РО и границ пласта поступают в блок 19 записи в буферную память,Блок 19 записи в буферную память в соответствии с промасштабированными в блоке 21 координатами РО и границ пласта записывает масштабное изображение исполнительных органов и границ пласта в буферную память 22 с учетом принятого соответствия точек масштабного экрана 23 ячейкам буферной памяти 22 ( в удобном для наблюдения виде),Блок 21 управления масштабным экранам сбеспечивает нормальнуга работу масштабного экрана 23 (т,е. формирует развертку и т,п,) и засвечивает отдельные точки экрана 23 в соответствии с записанной в буферной памяги 22 информацией, Г 1 ри обращении к буферной памяти 22 приоритетом обладает блок 19 записи в буферную память относительно блока 24 управления масштабным экранам,При смене отображаемого на масштабном экране участка лавы или при нажатии кнопки "Сброс" блока 17 выбора режима блок 19 заплси в буферную память очищает весь экран (Оануляет буферную память 22) и записывает в буферную память исходную для данных режимов "Запись" и "Отработка" инфармациа, а именно: координаты границы пласта (атабракается на экране 23 как пунктирная линия) и заданнукэ ранее программу перемещения режущим органом комбайна (отображается на экране 23 в влде, например, траектории движения РО),Таким образом, машинист-оператор, видя на экране масштабное изображение гсэаниц пласта и загисанной раее программы перемещения РО комбайна, может оценить степень несоответствия программы реальному залеганию и принять решение а необходимости в ее корректировке. А наба;адая за двикением масштабного изображения РО отнаситегьно заданной программы, машинист мажет парировать отказы программного блока 10,Работа системы и режиме "Коррекции" осуществляется следующим образом,Г 1 ереключзтель "Запись" с"Отработка"/"Коррекция" с полакении "Коррекция". При этом блок 4 выбора ресигла отключает блок 9 преобразования координат и программный блок 10 и передает управление блоку 20 изме е 1 ля координат, Гсереключатели в блоке переключателеЙ блока 20 со 1610002 10ответствуют управлению движением режущими органами комбайна (" Вверх", "В низ","Влево", "Вправо" ),После перехода в режим "Коррекция" вблоКе суммирования блока 20 устанавливаются начальные значения координат Х и Уиспрлнительных органов. Нажатием любогопервключателя в блоке переключателей вблоК суммирования подается команда насоответствующее изменение координатыРО(если "Вверх", то прибавить к вертикальной, координате У постоянную дискрету,"Вниз" - отнять, "Вправо" - прибавить кгоризонтальной координате Х постояннуюдисрету, "Влево" - отнять и т,д,), Полученные в блоке суммирования блока 20 координаты режущих органов поступают вблок 21 определения рабочего участкаи вблок 19 записи в буферную память, Эти жекоординаты поступают и в блок 18 изменения программы, который может представлять собой известное устройство ввиде коммутатора, управляемого блоком17 выбора режима.Если переключатель "Поиск" / "Замена"находится в положении "Замена", то коммутатор в блоке 18 изменения программыоткрыт и координаты РО записываются впамяти программного блока 10, заменяяпредыдущу о программу, Если же переключатель "Поиск" /" Замена" находится в положении "Поиск, то происходит толькоотображение исполнительных органов намасштабном экране 23, В этом режиме намасштабном экране 23 производят подводмасштабного изображения исполнительных органов к месту начала корректировкипроГраммыТаким образом, действия машиниста поуправлению комбайном с помощью предло;кенной системы заключаются в следующем,Перед началом каждого выемочногоцикла машинист пеоеводит переключатель"Запись"/"Отработка"/"Коррекция" в блоке 17 выбора режима в положение "Коррекция", а переключатель "Поиск"/"Замена" вположение "Поиск", При этом на экране 23появляется масштабное изображение гра, ниц пласта, координаты которых определены на предыдущем выемочном цикленапример, пунктирная линия), заданных ранее траекторий перемещения главных образующих точек режущих органов (например,сплошная линия) и собсвенно режущих органов.Машинист по представленному изображенрю оценивает соотвествие заданнойпрограммы и границ пласта и в случае, еслион считает необходимым изменение про 5 10152040 45 50.аом и аналого-цифровым преобразоватеграммы на отдельных участках, используя переключатели в блоке переключателей блока 20 изменения координат, перемещает на экране 23 масштабное иэображение РО к месту, где необходимо изменить программу (заданные ранее траектории перемещения главных образующих точек исполнительных органов). Затем переключатель "Поиск" / "Замена" он ставит в положение "Замена" и перемещает масштабноеиэображение РО в соответствии со своим представлением о рациональной траектории их перемещения. По окончании участка несоответствия границ пласта и заданных ранее траекторий перемещения исполнительных органов переключатель "Поиск" / "Замена" необходимо перевести в положение "Поиск" и переместить масштабное изображение режущих органов к следующему участку, на котором необходимо изменить программу,повторив процедуру изменения программы (переключатель "Поиск" /" Замена" ставит в положение "Замена" и т,д.),После изменения программы на всех участках несоответствия ее границам пласта машинист переводит переключатель "Запись" / "Отработка" /" Коррекция" в положение "Отработка", и производится выемочный цикл в режиме "Отработка", т.е. по заданной программе.В случае отсутствия координат границ пласта (1-й выемочный цикл после нарезки лавы) машинист ставит переключатель "Запись" / "Отработка" /" Коррекция" в положение "Запись" и производит образцовыйвыемочный цикл, при выполнении которого определяются координаты границ пласта и запоминаются координаты траекторий перемещения главных образующих точек исполнительных органов (программа).Блок 9 преобразования координат, программный блок 10, блоки 11,12 формирования управляющих воздействий, блок 21 определения рабочего участка, блок 19 записи в буферную память, буферная память 22, блок 24 управления масштабным экраном, блок 20 изменения координат и блок 18 изменения программы могут быть реализованы на микросхемах серии К 176, К 561, КР 580, 252, 212, 156 серий, полевых и биполярных транзисторах, электромагнитных реле в типовом включении,Масштабный экран 23 может быть выполнен на базе газоразрядной индикаторной панели постоянного тока типа ИМГ - 1,В качестве датчика 1 продольного угла наклона комбайна может применяться компенсационный емкостной измеритель углаотклонения от вертикали с синусным выхолем. Аналогично датчики, определяющие угол наклона поворотного редуктора, мОгут использоваться в качестве датчиков 5,6 контроля положения РО, В качестве датчика 4 пути, пройденного комбайном, может использоваться датчик типа ДМК, В качестве датчиков 7,8 контроля толщины угольной пачки могут использоваться радиоизотопные датчики, входящие в состав аппаратуры автоматического слежения за границами пласта типа "Квант", В качестве исполнительных элементов 13,14 может использоваться электропривод очистного комбайна,Преимуществами изобретения являются повышение безопасности ведения очистных работ за счет исклочения присутствия человека в лаве во время задания программы, ее корректировки и между выемочными циклами (при ручной корректиров" ке программы для компенсации подштыбовки конвейера); снижение трудоемкости за счет автоматического запоминания координат траектории режущих органов и границ пласта,Формула изобретения Система программного управления угледобывающим комбайном по авт.св, %1250651,отличающаяся тем, что, с целью повышения безопасности и снижения напряженности ведения работ в забое,Ош Юлогга И пкенеиий каардиоащ др система снабжена датчиками контроля толщины угольных пачек, блоком выбора режима, блоком записи в буферную память, блоком определения рабочего участка, бло ком изменения координат, блоком изменения программы, буферной памятью, блоком управления масштабным экраном и масштабным экраном, при этом выходы датчиков контроля толщины угольных пачек соедине 10 ны с входами блока преобразования координат, выход которого подключен к первому входу блока определения рабочего участка, к выходу которого подключены последовательно соединенные блок15 записи в буферную память, буферная память и масштабный экран, второй вход последнего соединен с первым выходом блока управления масштабным экраном, второй выход которого подключен к второ 20 му входу буферной памяти, при этом выход блока выбора режима соединен с входом блока преобразования координат, входом программного блока, с вторым входом блока записи в буферную память, вхо 25 дом блока изменения координат и первым входом блока изменения программы, второй вход которого подключен к выходу блока изменения координат, который также подключен к второму входу блока опреЗО деления рабочего участка, причем выход блока изменения программы соединен с входом программного блока, цл 7 длпка 9ес 5 раи 5 пиав кссрдинащ, г. Ужгород, ул,Гагарина, 1 аа 3715 ВНИИПИ Гос Тираж 391 Государственного комитета по и 113035, Москва, Ж, Подписноеретениям и открытиям при ГКНТ ССшская наб 4/5
СмотретьЗаявка
4398192, 28.03.1988
НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ ПО СОЗДАНИЮ И ВЫПУСКУ СРЕДСТВ АВТОМАТИЗАЦИИ ГОРНЫХ МАШИН "АВТОМАТГОРМАШ"
ЗЛОДЕЕВ АЛЕКСАНДР ВАСИЛЬЕВИЧ, РЕВЯКИН ВЛАДИМИР ИВАНОВИЧ, СИНЕНКО ВИКТОР ВАСИЛЬЕВИЧ, ДОЛИННЫЙ АНДРЕЙ ВЛАДИМИРОВИЧ, КОТЛЯРСКИЙ АЛЕКСАНДР ИСАЕВИЧ, ТУРИЦЫН ЮРИЙ АЛЕКСЕЕВИЧ, БОРДЗИЛОВСКИЙ АЛЕКСАНДР ИОСИФОВИЧ
МПК / Метки
МПК: E21C 35/24
Метки: комбайном, программного, угледобывающим
Опубликовано: 30.11.1990
Код ссылки
<a href="https://patents.su/7-1610002-sistema-programmnogo-upravleniya-ugledobyvayushhim-kombajjnom.html" target="_blank" rel="follow" title="База патентов СССР">Система программного управления угледобывающим комбайном</a>
Устройство для защиты от изменения напряжения и частоты блока автономного асинхронного генератора

Номер патента: 1730708
Опубликовано: 30.04.1992
Авторы: Витовский, Кадыркулов, Шпартько
МПК: F03B 15/00, H02H 3/24, H02H 7/093, H02P 9/46
Метки: автономного, асинхронного, блока, генератора, защиты, изменения, частоты
...срабатыванияреле 66 напряжения последнее срабатыва 55ет, замыкаются контакты 67, 68 этого реле, открываются тиристоры 76, 77, подключая балластное сопротивление 21 к выходным выводам 34, 35 блока асинхронного генератора 1, После подключения сопротивления 21 напряжение на выходных выводах 34, 35 снижается и оказывается в заданных допустимых пределах. В таком режиме с подключенным сопротивлением 21 микроГЭС может работать длительное время.Подключение сети к блоку асинхронного генератора 1 осуществляется путем нажатия кнопки 26 "Пуск", при этом срабатывает магнитный пускатель 22, замыкаются контакты 23, 24, 25 магнитного пускателя, и после отпускания кнопки 26 "Пуск" магнитный пускатель 22 удерживается в сработанном состоянии током,...
Устройство для обнаружения и исправления ошибок в блоках памяти
Номер патента: 1018151
Опубликовано: 15.05.1983
МПК: G11C 29/00
Метки: блоках, исправления, обнаружения, ошибок, памяти
...с входом блока управления и у является выходом устройства, выходыпервого и второго дешифраторовподключены соответственно к однимнз входов элементов ИЛИ, введенытретий и четвертый преобразователикодов, третий дешифратор и сумматоры,причем входы третьего преобразователя кодов соединены с другими выходамиформирователя контрольных сигналов,один из выходов которого являетсяуправляющим, выходы третьего преобразователя кодов подключены к одним извходов первого сумматора, другие вхо-ды которого соединены с выходами первого преобразователя кодов и однимииэ входов второго сумматора, другиевходы которого подключены к выходамвторого преобразователя кодов, а выходы - к одним из входов первогодешифратора и третьего сумматора,выходы которого...
Механизированная крепь для слоевой выемки мощных крутых и наклонных пластов

Номер патента: 1739048
Опубликовано: 07.06.1992
Авторы: Альхимович, Бодусев, Карташов, Найдов, Романко
МПК: E21C 41/18, E21D 23/00
Метки: выемки, крепь, крутых, механизированная, мощных, наклонных, пластов, слоевой
...бока пласта в момент разгрузки распора гидравлических стоек секций, перемещая при этом гибкое перекрытие, которое не только опускается на почву вынимаемого слоя за блок-секцией, но также смещается в сторону лежачего бока пласта, что предотвращает зависания гибкого перекрытия и уменьшает напряжения наиболее нагруженных стальных лент, а следовательно, исключает порывы гибкого перекрытия над сопряжением очистного забоя с лежачим боком пласта, имевшие место при шахтных экспериментах новой технологии механизированной добычи угля,На фиг.1 представлена блок-секция крепи, вид сбоку; на фиг.2 - вид А на фиг.1; на фиг.3 - вид Б на фиг.1; на фиг.4 - схема падения мощного крутого пласта, отрабатываемого горизонтальными слоями под гибким...
Автоматизированная система для определения координат положения пчелиной матки

Номер патента: 2004152
Опубликовано: 15.12.1993
МПК: A01K 57/00
Метки: автоматизированная, координат, матки, положения, пчелиной
...признак присутствия матки отсутствует при просмотре всех рамок, то эту операцию повторяют в другое время (поз.11, 13, 15, 16). При отсутствии матки выдается информация отсутствия (поз.14).Если признак присутствия матки имеется (поз.5), то просматривают следующую рамку (поз.7) и вновь анализируют признак присутствия матки (поз.8). При отсутствии признака присутствия формируется рисунок предыдущей рамки с координатами пчелиной матки, а так ке аксонометрический рисунок с местом ее нахождения (поз.9,12). В автоматическом режиме просмотра (поз.4) ЭВМ 1 самостоятельно определяет номер рамки, где находится матка, и выводит на экран дисплея ее рисунок с номером (поз.9).ЭВМ 1 может так же по запросу оператора (пчеловода) вывести на экран...
Устройство для определения характеристик нефтеносных пластов в процессе бурения

Номер патента: 791956
Опубликовано: 30.12.1980
МПК: E21B 47/00, E21B 47/12
Метки: бурения, нефтеносных, пластов, процессе, характеристик
...раствора и местом установки глубинной части устройства относительно забоя скважины (обычно этовремя не превышает нескольких десятков секунд).. 55Вместе с тем по Форме сигнала.)Н,) с высокой точностью могут бытьопределены начало и конец продуктивного участка разреза, а следовательно, найдена мощность коллектора и 60осуществлена привязка получаемой информации к глубине скважины. Началоколлектора отмечается превышениемамплитуды сигнала 5 И) заданногопорогового уровня, соответствующег, Я фоновой концентрации нефти в буровом растворе, а его конец - соответственно уменьшением амплитуды сигнала 514) до порогового значения.При измерении интенсивности люминесценции нефти в выходящем из скважины буровом растворе форма реги. стрируемого...
Предыдущий патент: Механизм подачи очистного комбайна
Следующий патент: Способ контроля границы порода-уголь
Случайный патент: Устройство для управления реверсив-ным вентильным электроприводом