Способ программного управления угледобывающим комбайном и система для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
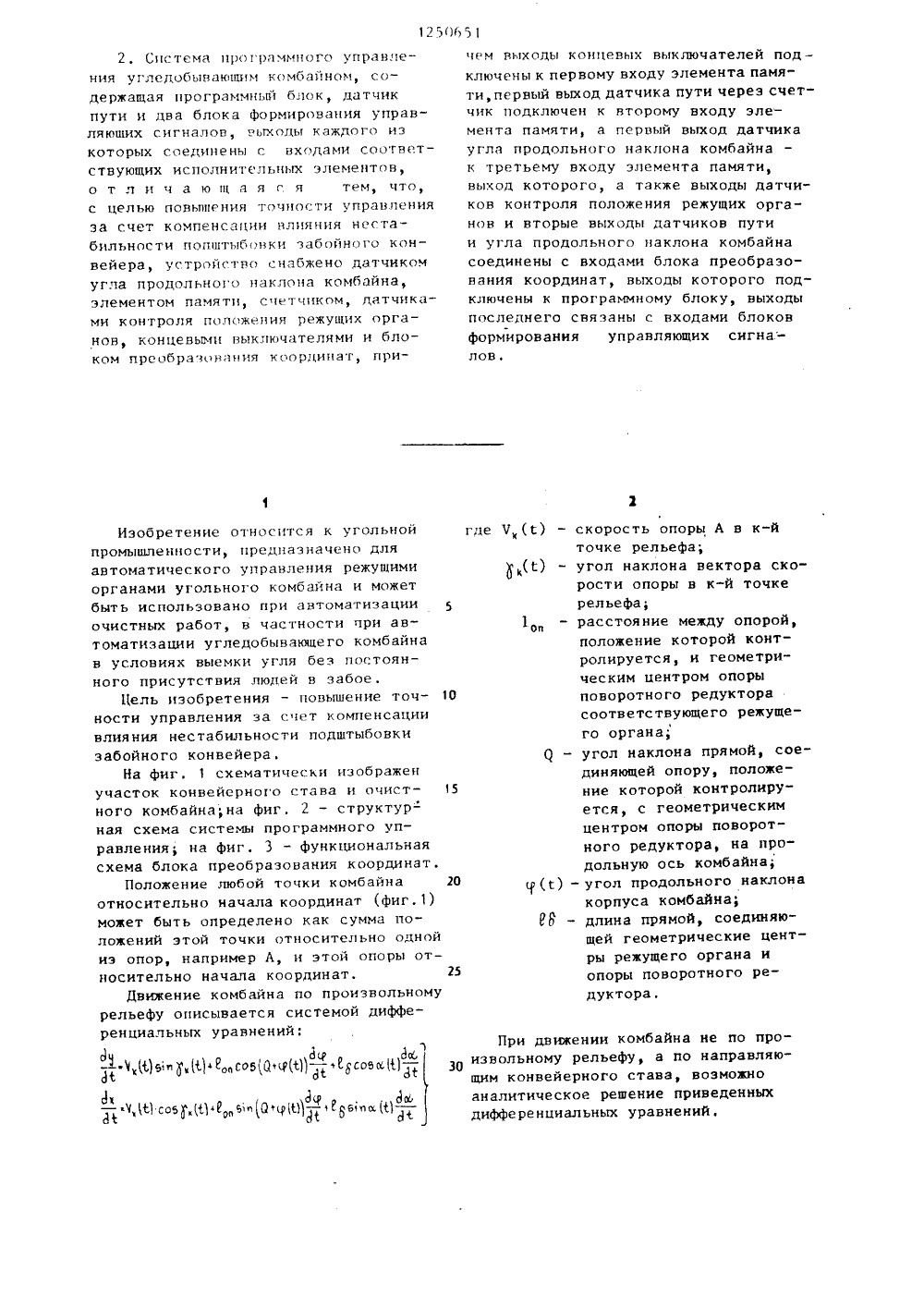
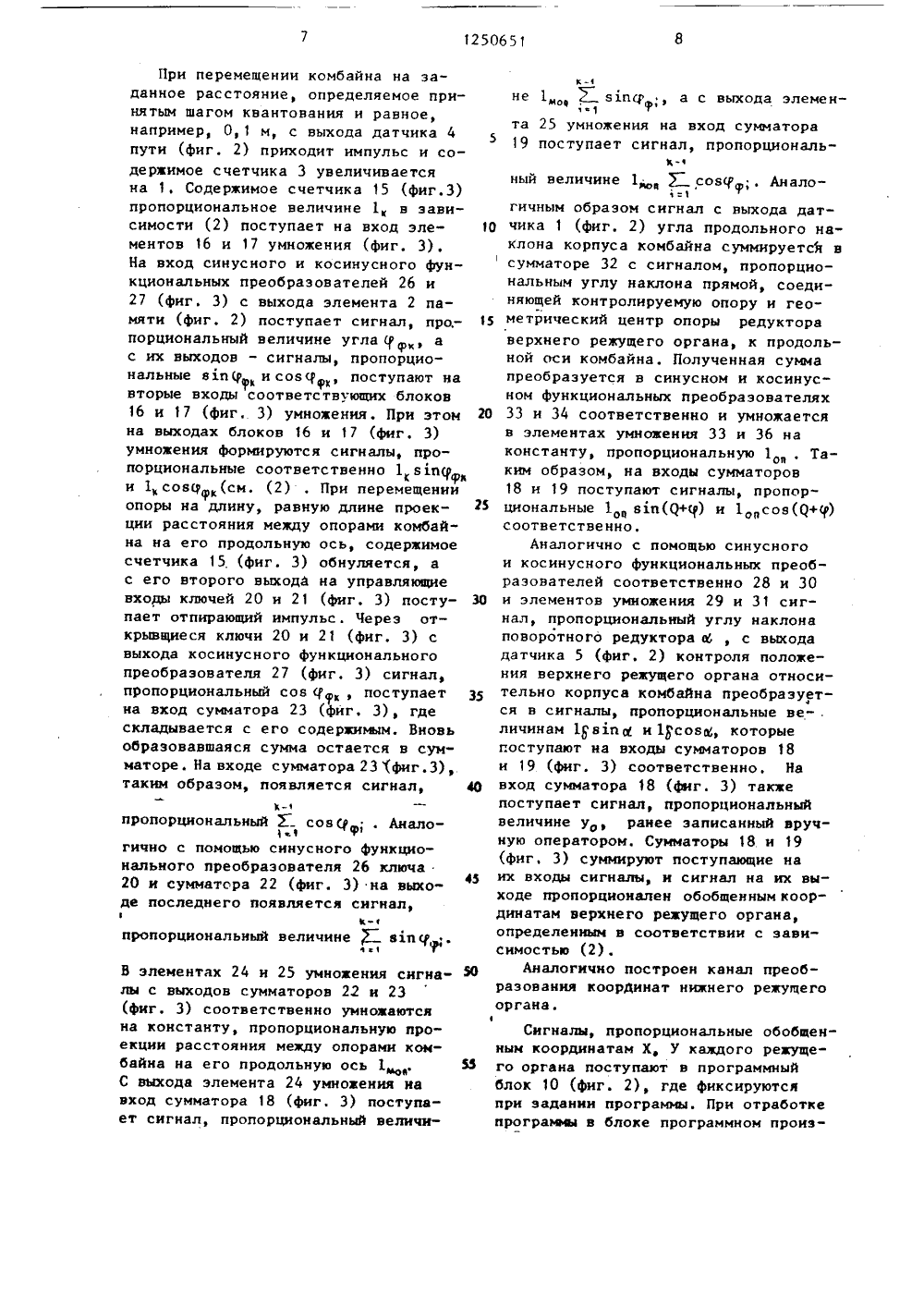
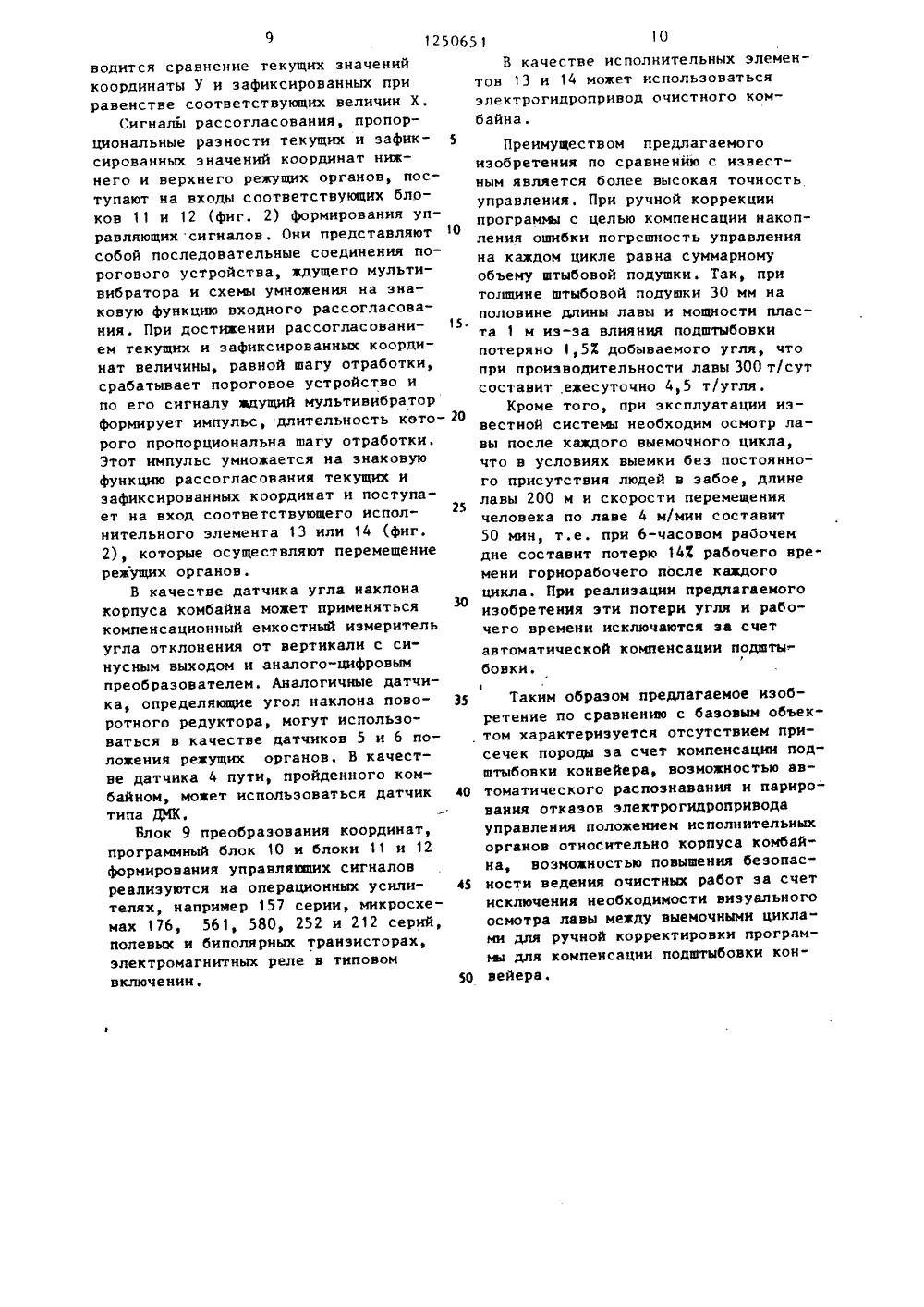
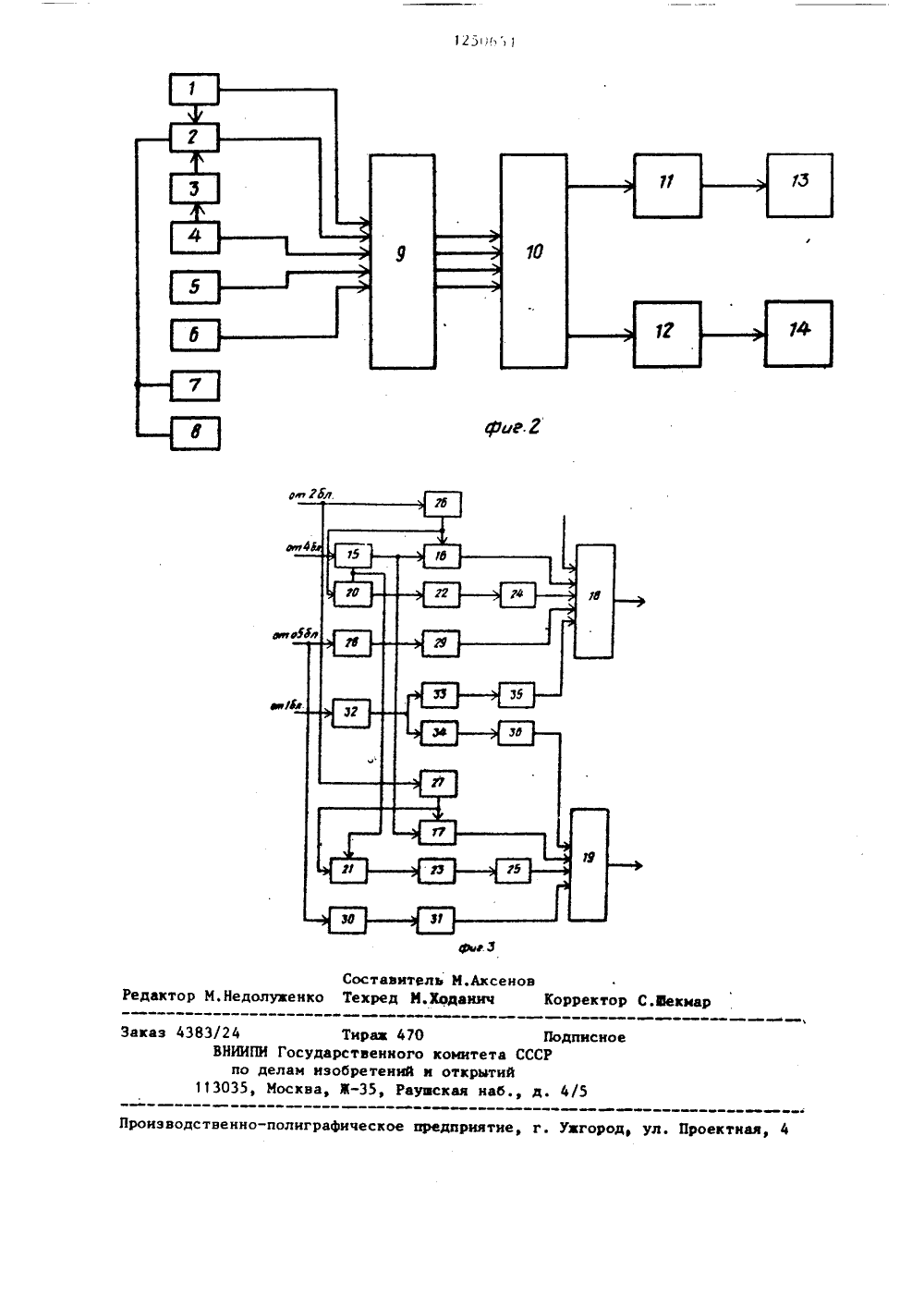
(51)4 Е 21 С 35 2 ПИСАНИЕ ИЗОБРЕТЕНИ АВТОРСКОМУ СВ ЬСТВ бьеди едств автоматизации (72) Д.И.фрег К.Ф.Зданов, А цын, А.И,Кот (53) 622.232.(56) АвторскоВ 805957, кл,Авторское Ф 972089, кл. (54) СПОСОБ П УГЛ ОБЫВ горных машинер, Д.И.Евстафьев,.К.Каганюк, Ю,А.Турилярский и В.А.Резнико 72 (088.8)е свидетельство СССРЕ 21 С 35/24, 1981. свидетельство СССРЕ 2 1 С 35/24, 1982. перемещение режущих водят в соответстви и знаком полуво енного ганов произс величинойассогяасоваГОСУДАРСТВЕННЫЙ, КОМИТЕТ СССР00 ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИИ(7 1) Научно-производственнкение по созданию и выпуск РОГРАММНОГО УПРАВЛЕНИЯЕД АЮЩИМ КОМБАЙНОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ(57) 1. Способ программного управления угледобывающим комбайном, заключающийся в измерении пути, пройденного комбайном, в задании программы, контроле положения режущих органов и в их перемещении в соответствик с заданной программой, о т л ич а ю щ и й с я тем, что, с целью повышения точности управления эа счет компенсации влияния нестабильности подштыбовки забойного конвейера, задают местоположение условнонеподвижной точки на сопряжении лавы, фиксируют момент начала движения комбайна относительно этой точки, иэмерйют и фиксируют угол наклона корпуса комбайна в момент началадвижения, после чего непрерывно измеряют угол наклона корпуса комбайнаи пройденный им путь, при равенствепути, пройденного комбайном, расстоянию между его опорами фиксируют уголнаклона корпуса комбайна, преобразуютизмеренные и зафиксированные величины в коЬрдинаты траекторий режущихорганов относительно условно неподвижной точки отсчета, причем при задании программы координаты траекторий фиксируют, а при отработке программ сравнивают текущие значениягоризонтальных координат с зафиксированными, при их равенстве сравнивают текущие значения вертикальныхкоординат с соответствующими зафиксированными, определяют величину изнак рассогласования между ними и12 ж 1 2. Система программного управле - ния угледобываюпв 1 м комбайном, содержащая программньп блок, датчик пути и два блока формирования управляющих сигналов, выходы каждого из которых соединены с входами соответствующих исполнительных элементов, о т л и ч а ю щ а я г. я тем, что, с целью повьппения точности управления за счет компенсации влияния нестабильности поп 1 птыбонки забойного конвейера, устройство снабжено датчиком угла продольного наклона комбайна, элементом памяти, счетчиком, датчиками контроля положения режущих органон, концевыми выключателями и блоком преобра ювания координат, прие Ч(С) - скорость опоры А в к-йточке рельефа;(1) - угол наклона вектора скорости опоры в к-й точкерельефа;1- расстояние между опорой,положение которой контролируется, и геометрическим центром опорыповоротного редукторасоответствующего режущего органаЯ - угол наклона прямой, соединяющей опору, положение которой контролируется, с геометрическимцентром опоры поворотного редуктора, на продольную ось комбайна;у ( и ) - угол продольного наклонакорпуса комбайна;- длина прямой, соединяющей геометрические центры режущего органа иопоры поворотного редуктора. Изобретение относится к угольной промышленности, предназначено для автоматического управления режущими органами угольного комбайна и может быть использовано при автоматизации очистных работ, в частности при автоматизации угледобывающего комбайна в условиях выемки угля без постоянного присутствия людей в забое.Цель изобретения - повышение точности управления эа счет компенсации влияния нестабильности подштыбовки забойного конвейера.На фиг. 1 схематически изображен участок конвейерного става и очист - ного комбайна;на фиг. 2 - структур- ная схема системы программного управления; на фиг. 3 - функциональная схема блока преобразования координат,Положение любой точки комбайна относительно начала координат (фиг.1) может быть определено как сумма положений этой точки относительно одной иэ опор, например А, и этой опоры относительно начала координат.Движение комбайна по произвольному рельефу описывается системой дифференциальных уравнений:3( Ы ", Ччз,.м.Е,ор- ,Е . Щ - , - ЧЦ со 5,ф 1 п,п ОУС)Рпюсс Й 1 -гд 1 О 15 20 25 При движении комбайна не по про- ЗО извольному рельефу, а по направляющим конвейерного става, возможноаналитическое решение приведенныхдифференциальных уравненийчем выходы концевых выключателей подключены к первому входу элемента памяти, первый выход датчика пути через счетчик подключен к второму входу элемента памяти, а первый выход датчикаугла продольного наклона комбайнак третьему входу элемента памяти,выход которого, а также выходы датчиков контроля положения режущих органов и вторые выходы датчиков путии угла продольного наклона комбайнасоединены с входами блока преобразования координат, выходы которого подключены к программному блоку, выходыпоследнего связаны с входами блоковформирования управляющих сигна.лов.о)оры овос)о 1 цо)о )с)сук -торя,1. 3 - длина прям й, с:ое,.сипя)цейгеометрические цецтры режущего )ргдцд и )порь 1 по -воротцс)го редуктора.В сис гему прогрдг)гсцого управления входят датчик 1 угла цр)дол 1 и го цд - клона комбайна, эпемецт 2 пдмяти, счетчик 3, датчик 4 пути, и)11 генного комбайном,датчики 5 и 6 коцтроля положения режущих с)ргдцов. Эти ддт - чики распо 11 ожецы цд комбдйце, Концевые выключатели 7 и Я рдсп).)ижицы по концдгл скребковогс ки)си рд, Выходы вс:ех ддтчиков 1 и 4 - 6 и элемец - та памяти 2 соединены с вход и б 1 ока 9 преобразования коордицдт, выходы которого черрз прогрдммцый бпск 10 и ссответствующие блоки 11 и 12 фОРМИРОВДЦИЯ УПРЯВ.1 ЯЩИХ "11 ГЦД.)1)Всоединены с сос)тветствующими входами исполцител) цыхец гов 1 3 и 14) д выходы концевых В),цв)чдте.е)1 ) и 8 СОЕДИЦЕЦЫ С ВХОДДМИ впЕМС)П ДЦД -мяти.Способ программцого упрдвлс.цияугледобывающим комбдйцсм ос ущес.твпя -ется с. помощью предпдгдемой игтемыследующим образом,Во время движения очистного комбайна с выхода датчика 1 сигналы,пропорциональные углу продольногонаклона комбайна, поступают цд входэлемента 2 памяти, Одновременно свыхода датчика 4 пути ца Вход счетчика 3 поступают сигналы квантования по пути с шагом, цдиример, 0,1 м,В счетчике 3 оци подечить)вдются ипри количестве импульсов, пропорциональном расстоянию между )порами комбайна,счетчик переполняется и обнуляется. При этом с выхода счет - чика 3 на вход элемента 2 памяти поступает сигнал, цо которому информация из последнего заносится в блок 9 преобразования координат, а в самом элементе памяти происходит стирание ранее имевшейся информации и запись сигнала с выхода датчика 1продольного угла наклона комбайна. При начале движения комбайна от одного из штреков по сигцалу одного из концевых выключателей 7 и 8 в элементе памяти 2 происходит первая запись информации об угле продольного наклона комбайна. Сигналы вьгхо)1 ов ддтчиков 1 и 4-6 и элемсцтд 2 пдмяти поступают на входыбпокд 9 преобразования координат.Рдботя и устройство блока 9 преС бР)1 ЗОВДЦИЯ ьООРДИЦДт ПОЯСНЯЕТСЯфиг. 3, цд котором изображена функциональная схема одного из двух ана.)о)ичцых его кацапов - канала прес)бракования координат верхнего режущего органа,Н:1 ок 9 содержит счетчик 15, выходк)торого связан через элементы 16 и17 умножения с входами сумматоров18 и 19. Второй выход счетчика черезключи 20 и 21 соответственно накап -пивдющие сумматоры 22 и 23 и элементы умножения 24 и 25 связан с входами сумматоров 18 и 19. Информацион 20цый вход ключа 20 и второй вход элемента 16 умножения связаны с выходом.ицусного функционального преобразователя 26, Информационный вход ключа2 и второй вход элемента 17 умноже 25ция связаны с выходом косинусногофункционального преобразователя 27.Выход второго синусного функционального преобразователя 28 через соответствующий элемент 29 умножения связан с входом сумматора 18,Выход второго косинусного преобразователя 30через элемент 31 умножения связанс входом сумматора 19. Выход сумматора 32 соединен с входами третьих 35 сицусцого 33 и косинусного 34 функциональных преобразователей, выходы которых через соответствующие элементыумножения 35 и 36 связаны с входамисумматоров 18 и 19 соответственно.40 Вход счетчика 15 (фиг. 3) связан свыходом датчика 4 пути (фиг. 2),ВХОДЫ С)1 ЦУСНОГО И КОСИНУСНОГО ФУНКциоцальцых преобразователей 26 и 27(фиг. 3) соединены с элементом 2 па 45 мяти (фиг, 2), выход сумматора 32с выходом датчика 1 (фиг. 2) углапродольного наклона корпуса комбайна,Входы синусного 28 (фиг. 3) и ко:ицусного 30 (фиг. 3) функциональных5) преобразователей соединены с датчиками контроля положения верхнего режущегоо органа 5 (фиг. 2). На сумматор18 (фиг. 3) кроме того, поступаетсигнал, пропорциональный у,записан 55 цый оператором вручную.Канал преобразователя координатверхнего режущего органа работаетследующим образом.При перемещении комбайна на заданное расстояние, определяемое принятым шагом квантования и равное,например, О, 1 м, с выхода датчика 4пути (фиг. 2) приходит импульс и содержимое счетчика 3 увеличиваетсяна 1, Содержимое счетчика 15 (фиг.З)пропорциональное величине 1 в зависимости (2) поступает на вход эле-ментов 16 и 17 умножения (фиг. 3),На вход синусного и косинусного функциональных преобразователей 26 и27 (фиг. 3) с выхода элемента 2 памяти (фиг. 2) поступает сигнал, про; 5порциональный величине угла, ас их выходов - сигналы, пропорциональные в 1 п(р и сов( , поступают наф рк фвторые входы соответствующих блоков16 и 17 (фиг, 3) умножения. При этом 20на выходах блоков 16 и 17 (фиг. 3)умножения формируются сигналы, пропорциональные соответственно 1 вопдК ф 3%и 1 совц (см. (2) . При перемещенииопоры на длину, равную длине проекции расстояния между опорами комбайна на его продольную ось, содержимоесчетчика 15 (фиг. 3) обнуляется, ас его второго выхода на управляющиевходы ключей 20 и 21 (фиг. 3) поступает отпирающий импульс. Через открывщиеся ключи 20 и 2 1 (фиг. 3) свыхода косинусного функциональногопреобразователя 27 (фиг. 3) сигнал,пРопорциональный сов (, поступает 35на вход сумматора 23 (фиг, 3), гдескладывается с его содержиьам. Вновьобразовавшаяся сумма остается в сумматоре. На входе сумматора 23 (фиг.З)таким образом, появляется сигнал, 40-1пропорциональный Е сов ц; . Аналои (р)гично с помощью синусного функционального преобразователя 26 ключа20 и сумматора 22 (фиг. 3) на выходе последнего появляется сигнал,1Ф 4пропорциональный величиневЫуаУ В элементах 24 и 25 умножения сигна- эО лы с выходов сумматоров 22 и 23(фиг. 3) соответственно умножаются на константу, пропорциональную проекции расстояния между опорами комбайна на его продольную ось 1 .Я С выхода элемента 24 умножения на вход сумматора 18 (фиг. 3) поступает сигнал, пропорциональный величи 1 мо- в 1 пца с выхода элемен 1 ау 1та 25 умножения на вход сумматора519 поступает сигнал, пропорциональк-чный величине 1совЧ ;. Аналое:1гичным образом сигнал с выхода датО чика 1 (фиг, 2) угла продольного наклона корпуса комбайна суммируетсй всумматоре 32 с сигналом, пропорциональным углу наклона прямой, соединяющей контролируемую опору и геометрический центр опоры редуктораверхнего режущего органа, к продольной оси комбайна. Полученная суммапреобразуется в синусном и косинусном функциональных преобразователях33 и 34 соответственно и умножаетсяв элементах умножения 33 и 36 наконстанту, пропорциональную 1 . Таопким образом, на входы сумматоров18 и 19 поступают сигналы, пропорциональные 1вдп(Я+) и 1 дсов(Я+)соответственно,Аналогично с помощью синусногои косинусного функциональнык преобразователей соответственно 28 и 30и элементов умножения 29 и 3 1 сигнал, пропорциональный углу наклонаповоротного редуктора Ю , с выходадатчика 5 (фиг. 2) контроля положения верхнего режущего органа относительно корпуса комбайна преобразуется в сигналы, пропорциональные величинам 1 рвдпв и асов, которыегоступают на входы сумматоров 18н 19 (фиг. 3) соответственно, Навход сумматора 18 (фиг. 3) такжепоступает сигнал, пропорциональныйвеличине уо, ранее записанный вручную оператором. Сумматоры 18 и 19(фиг, 3) суммируют поступающие наих входы сигналы, и сигнал на их выходе пропорционален обобщенным координатам верхнего резущего органа,определенным в соответствии с зависимостью (2),Аналогично построен канал преобразования коорДинат нижнего режущегооргана.Сигналы, пропорциональные обобщенным координатам Х, У каждого режущего органа поступают в программныйблок 10 (фиг. 2), где фиксируютсяпри задании программы. При отработкепрограмм в блоке программном произ 1250651 101 О 1520 25 30 35 40 45 0 водится сравнение текущих значений координаты У и зафиксированных при равенстве соответствующих величин Х.Сигналы рассогласования, пропорциональные разности текущих и зафиксированных значений координат нижнего и верхнего режущих органов, поступают на входы соответствующих блоков 11 и 12 (фиг. 2) формирования управляющих сигналов. Они представляют собой последовательные соединения порогового устройства, ждущего мультивибратора и схемы умножения на знаковую функцию входного рассогласования. При достижении рассогласованием текущих и зафиксированных координат величины, равной шагу отработки, срабатывает пороговое устройство и по его сигналу адущий мультивибратор формирует импульс, длительность которого пропорциональна шагу отработки, Этот иипульс умножается на знаковую функцию рассогласования текущих и зафиксированных координат и поступает на вход соответствующего исполнительного элемента 13 или 14 (фиг.2), которые осуществляют перемещение режущих органов.В качестве датчика угла наклона корпуса комбайна может прииеняться компенсационный емкостный измеритель угла отклонения от вертикали с синусным выходом и аналого-цифровым преобразователем. Аналогичные датчика, определяющие угол наклона поворотного редуктора, могут использоваться в качестве датчиков 5 и 6 положения режущих органов. В качестве датчика 4 пути, пройденного комбайном, может использоваться датчиктипа ДМК.Блок 9 преобразования координат, программный блок 10 и блоки 11 и 12 формирования управляющих сигналов реализуются на операционных усилителях, например 157 серии, микросхемах 176, 56 1, 580, 252 и 212 серий, полевых и биполярных транзисторах, электромагнитных реле в типовом включении. В качестве исполнительных элементов 13 и 14 может использоваться электрогидропривод очистного комбайна. Преимуществом предлагаемого изобретения по сравнению с известным является более высокая точность управления. При ручной коррекции программ с целью компенсации накопления ошибки погрешность управления на каждом цикле равна сумиарному объему штыбовой подушки. Так, при толщине штыбовой подушки 30 ми на половине длины лавы и мощности пласта 1 м из-эа влияния подштыбовки потеряно 1,5 Х добываемого угля, что при производительности лавы 300 т/сут составит, ежесуточно 4,5 т/угля.Кроме того, при эксплуатации известной системы необходим осмотр лавы после каждого выемочного цикла, что в условиях выемки без постоянного присутствия людей в забое, длине лавы 200 м и скорости перемещения человека по лаве 4 м/мин составит 50 мин, т.е. при 6-часовом рабочем дне составит потерю 143 рабочего вре" мени горнорабочего после каждого цикла. При реализации предлагаемого изобретения эти потери угля и рабочего времени исключаются за счет автоматической компенсации подштыбовки. Таким образом предлагаемое изобретение по сравнению с базовым объектом характеризуется отсутствием присечек породы эа счет компенсации подштыбовки конвейера, возможностью автоматического распознавания и парирования отказов электрогидропривода управления положением исполнительных органов относительно корпуса комбайна, воэможностью повышения безопасности ведения очистных работ эа счет исключения необходимости визуального осмотра лавы между выемочными циклами для ручной корректировки программы для компенсации подштыбовки конвейера.Составитель М.Аксенонко Техред М.Ходаиич Редактор М.Нед ректор С.йекмар Производственно-полиграфическое предприя Проектная, 4 ор Заказ 4383/24 Тираа ВНИИПИ Государствен по делам иэобрете 113035, Москва, Ж, 70 Подписиго комитета СССРий и открытийауаская наб., д, 4/5
СмотретьЗаявка
3831914, 28.12.1984
НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ ПО СОЗДАНИЮ И ВЫПУСКУ СРЕДСТВ АВТОМАТИЗАЦИИ ГОРНЫХ МАШИН
ФРЕГЕР ДАВИД ИСААКОВИЧ, ЕВСТАФЬЕВ ДМИТРИЙ ИСААКОВИЧ, ЖДАНОВ КОНСТАНТИН ФЕДОРОВИЧ, КАГАНЮК АЛЕКСЕЙ КАЗИМИРОВИЧ, ТУРИЦЫН ЮРИЙ АЛЕКСЕЕВИЧ, КОТЛЯРСКИЙ АЛЕКСАНДР ИСАЕВИЧ, РЕЗНИКОВ ВЛАДИМИР АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: E21C 35/24
Метки: комбайном, программного, угледобывающим
Опубликовано: 15.08.1986
Код ссылки
<a href="https://patents.su/7-1250651-sposob-programmnogo-upravleniya-ugledobyvayushhim-kombajjnom-i-sistema-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ программного управления угледобывающим комбайном и система для его осуществления</a>
Устройство для нормализации сигналов датчика

Номер патента: 712944
Опубликовано: 30.01.1980
Автор: Поспелов
МПК: H03K 5/153
Метки: датчика, нормализации, сигналов
...канала, вход которого подключен ко входу датчика.На чертеже изображена блок-схема устройства.Устройство для нормализации сигналов датчика 1 содержит передающий канал 2, включающий выпрямитель 3, вход которого, служащий Входом канала, подключен через оптрои 4 и пороговому элементу 5. Выход порогового элемента 5, служащий выходом канала, подключен к пнформациошому входу Д-триггера 6. К тактирующему входу Д-трпггсра 6 подкл.очен выход дополнительного пср еда ющего канала 7, идентичного каналу 2, т. е. включающего в себя выпрямигсль 8, Оптрон 9 и порого/ Составитель В. ЖмуровРедактор А. Купрякова Техред Л. Камышникова Корректор Л. Степанова Заказ 280/6 Изд.113 Тираж 995 Подписное НПО Поиск Государствеипого комитета СССР по делам изобретений...
Устройство для регистрации сигнала мостового датчика

Номер патента: 989324
Опубликовано: 15.01.1983
Авторы: Голофеевский, Плискин, Ракаев, Фельдберг
МПК: G01H 1/00
Метки: датчика, мостового, регистрации, сигнала
...выполненной 15 в виде последовательно соединенных источника 2 опорного напряжения и схемы 3 сравнения, выход которой подсоединен к Регулирующему входу генератора 1, а второй вход к его выходу, усилитель 4 напряжения, инввр-, тор 5, мост 6, второй вход которого соединен с выходом усилителя 4 нацря" ження и параллельно соединенные с ним компвнсаторы 7 и 8 активной и реактивной составляющих соответственно, а выход моста 6 аоединен а последовательно соединенными диффврвнциаль" иым усилителем 9, усилителем 10 мощности, второй вход которого соединен с выходом компвнсатора 7 активной составляющей, Фаэовым детектором 11, второй вход которого соединен с выходом инввртора 5 и Фильтром 12 нижних частот.Устройство содержит также последа- З 5...
Измеритель сигналов датчика с низкочастотным выходом

Номер патента: 1388815
Опубликовано: 15.04.1988
МПК: G01R 23/02
Метки: выходом, датчика, измеритель, низкочастотным, сигналов
...частоту Г , осуществлять прямосчетные измерения неизвестной частоты Г, во-вторых, изменяя М, можно изменять единицы измерения физической величины х или, используя один и тот же измеритель, производить измеренияразличных физических величин в. удобных единицах измерения Устройство работает в два такта(первый такт измерительный, а второй - корректирующий).В измерительном такте колебанияс датчика подаются на информационную шину 1 (фиг, 1), Формирователь 3импульсов из входных колебаний (фиг,2 а) формирует прямоугольные импульсы(фиг, 2 б),длительностью, равной иликратной полупериоду измеряемой частоты, Эти импульсы через второй ключ5, на управляющий вход которого подан разрешающий сигнал с синхронизатора 18, поступают на схему ИЛИ 6...
Устройство для запоминания экстремальных электрических сигналов датчиков

Номер патента: 147329
Опубликовано: 01.01.1962
Автор: Покровский
МПК: G11C 23/00
Метки: датчиков, запоминания, сигналов, экстремальных, электрических
...храповик 8, и заводит возвратную пружину 11. По окончании замера реверсивный двигатель измерительного прибора, изменит направление вращения и замкнет контакт К,. Так как контактная пластинка К, поводка 3 касается рычага 10, то реле Р и электромагнит ЭМ окажутся под напряжением, подведенным к зажимам 12, реле Р обесточит147329электромагнит ЗМ и самоблокируется, а храповик 8 застопорится собачкой электромагнита.Если значение контролируемого параметра следующего замера будет иметь меньшую величину, то поводок 3 не дойдет до рычага 10 и при изменении направления вращения валика 1 контакт К, включит электромагнит, собачка освободит храповик и валик 7 повернется до упора рычага 10 в поводок 3, контакт К, замкнется, реле Р сработает...
Устройство асинхронного сопряжения синхронных двоичных сигналов

Номер патента: 510792
Опубликовано: 15.04.1976
Автор: Сараев
МПК: H04J 3/00
Метки: асинхронного, двоичных, сигналов, синхронных, сопряжения
...по п-ый в том случае, когда между двумя управляющими импульсами содержится и единичных интервалов СДС и по являются последовательно с первого по (и ++1)-й или (и - 1)-й выходы, а междуправляющими импульсами - (и+1) или (и - 1) соответственно единичных интервалов СДС (фиг. 2, д - к) .15 На фиг. 2 приведен случай, когда междудвумя управля 1 ощими импульсами из-за расхождения частот появляется (и+1) единичных интервалов.Импульсы с выходов управляемого распре делителя 3, являющиеся импульсами записиСДС, поступают на входы записи информации блока памяти 5.Результат сравнения тактовой частоты СДС, и опорных импульсов " с фазовогоЮкомпаратора 1 поступает на кодер фазы 2, который выдает в блок памяти 5 двоичный код интервала между опорными и...
Предыдущий патент: Угольный струг
Следующий патент: Способ добычи блоков из природного камня и устройство для его осуществления (его варианты)
Случайный патент: Килоамперметр