Адаптивный комплекс для обучения операторов систем управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
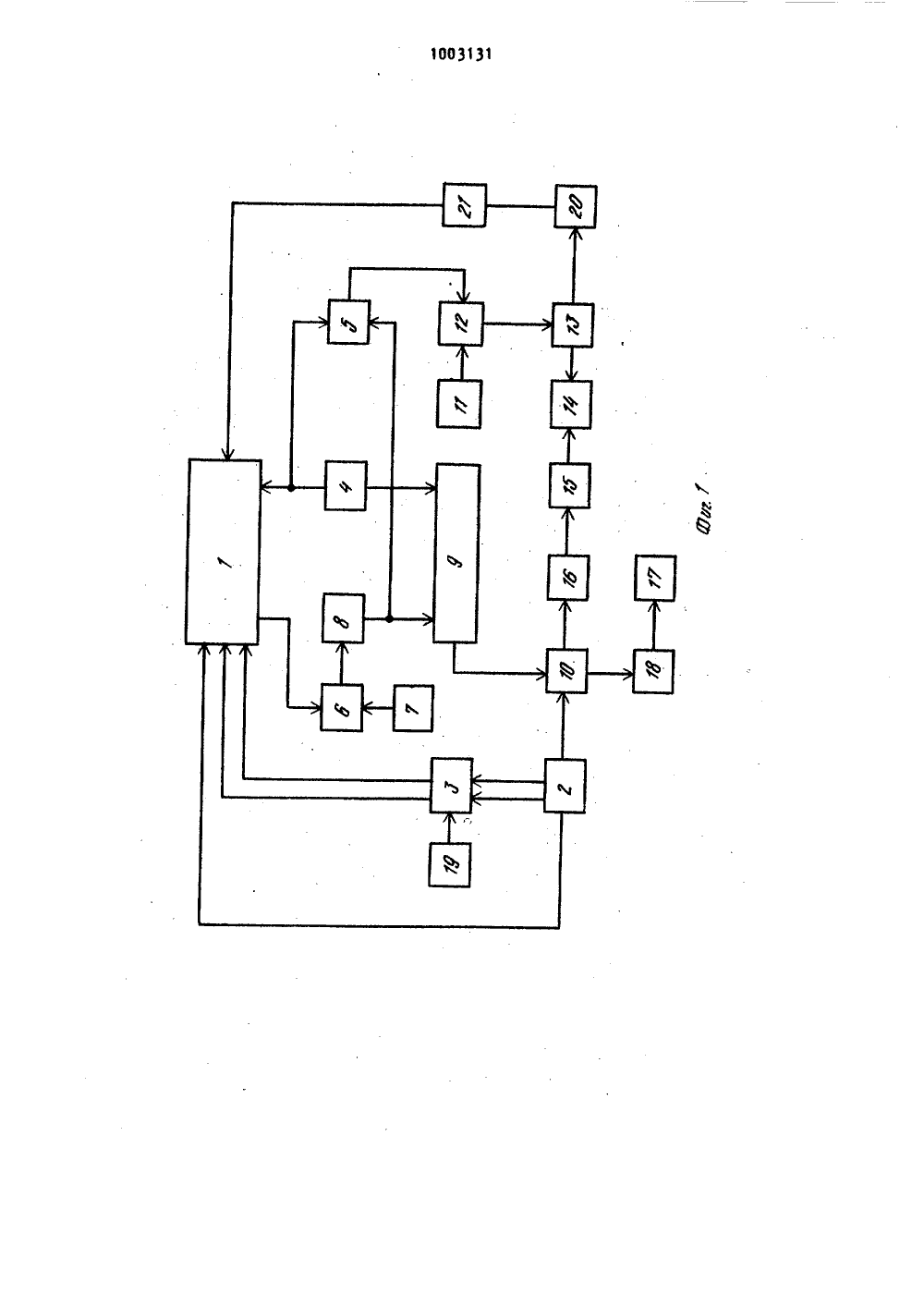
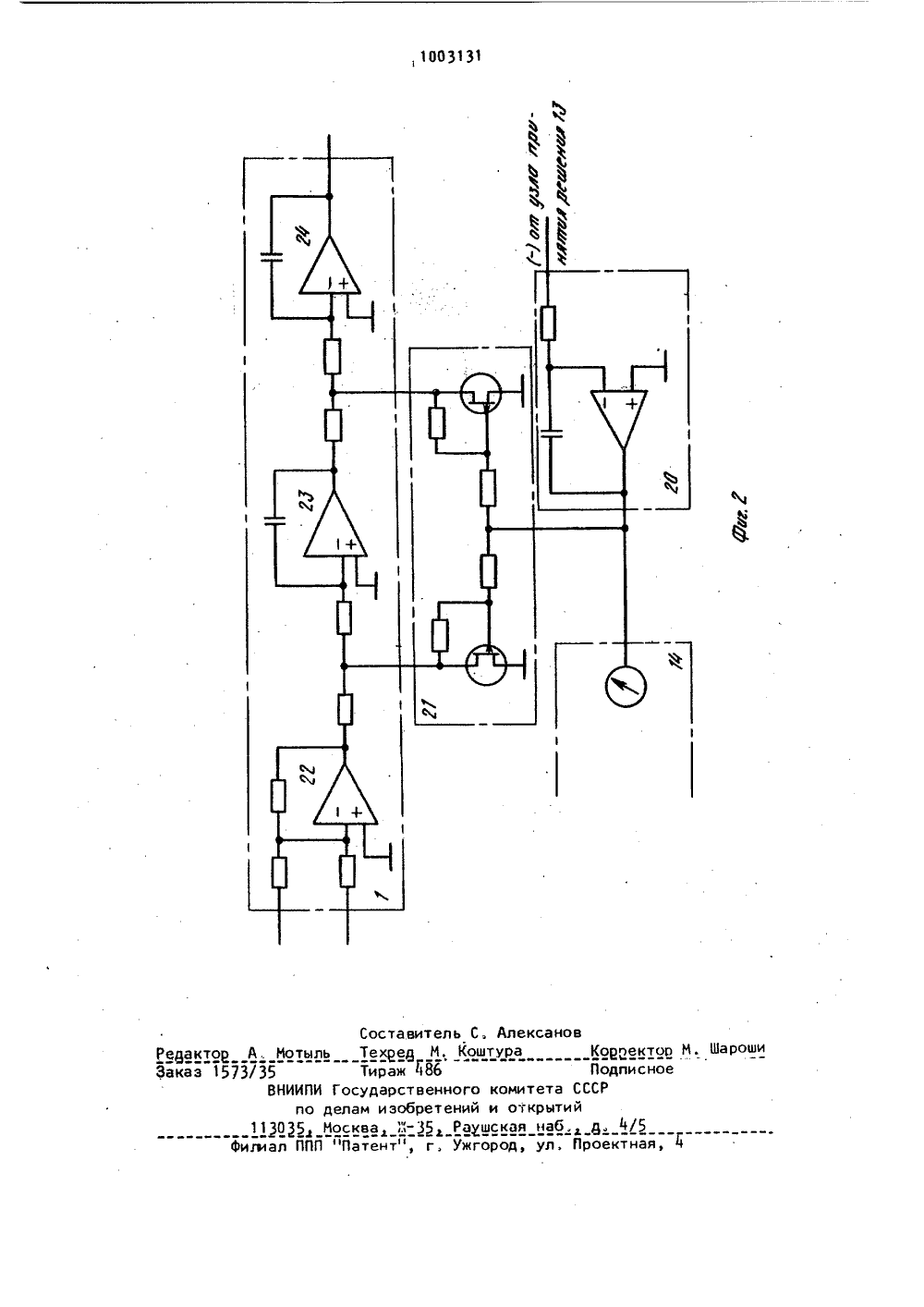
ОП ИСАНИЕИЗЬБРЕТЕН ИЯН АВТОРСНОМУ СВИДЕТЕЛЬСТВУ Союз СоветскнкСоцнапистнческнкРеспубики(11) 1003131 1) Дополнительное к авт, свид-ву2)Заявлено 22.02,82 (21) 3387301/18-12 51)М. Кл. С 09 В 9/00 с присоединением зая иМ 23) Приоритет Гесумрст вивт СССРмлаи извйретвиий и еткрмтий Опубликовано 07.03,83. Бюллетень Дата опубликования описания 09. 0(71) Заявитель Московский институт электронного машиностроения 51) АДАПТИВНЫЙ КОМПЛЕКС ДЛЯ ОБУНЕНИ ОПЕРАТОРОВ СИСТЕМ УПРАВЛЕНИЯИзобретение относитсяствам для обучения операуправления к устронторов системИзвестен адаптивный комплекс для обучения операторов систем управления,5 содержащий блок моделирования объекта тренажа, соединенный непосредственно и через узел имитации внешних воздействий с программным блоком, подключенным через первый блок сравнения к . 10 формирователю сигналов, блоку регистрации отклонений в процессе тренажа и блоку отображения информации и принятия решения, соединенному через второй блок сравнения с блоком эталонных им пульсных переходных функций и вычислительным блоком, подключенным к блоку моделирования объекта тренажа и блоку ручного управления, соединенному с формирователем сигнала, и инди 20 катор, связанный с вычислительным блоком и формирователем сигналов 11. Недостатком известного адаптивного комплекса является невысокая эффективность тренажа.Цель изобретения - повышение эф" Фективности тренажа,Поставленная цель достигается тем, что адаптивный комплекс для обучения операторов систем управления, содержащий блок моделирования объекта тре" нажа, соединенный непосредственно и через узел имитации внешних воздействий с программным блоком, подключенным через первый блок сравнения к формирователю сигналов, блоку регистрации отклонений в процессе тренажа и блоку отображения информации и при- нятия решения, соединенному через вто" рой блок сравнения с блоком эталонных импульсных переходных функций и вы" числительным блоком, подключенным к блоку моделирования объекта тренажа и блоку ручного управления, соединен" ному с формирователем сигналов, и ин"3 10031ди катор, связанный с вычислительнымблоком и Формирователем сигналовимеет имитатор фоновых помех, сумма"тор, адаптивный блок и блок управления параметрами объекта тренажа, выход которого подключен к управляющему входу блока моделирования объектатренажа, связанного информационнымвыходом с первым входом сумматора,второй вход которого подключен к выходу имитатора фоновых помех, а выход - к входу индикатора, при этомуправляющий выход блока отображенияинформации и принятия решения черезадаптивный блок подключен к входу 1 Зблока управления параметрами объекта тренажа,На фиг, 1 представлена Функциональная схема адаптивного комплекса дляобучения; на Фиг. 2 - схема блока щмоделирования объекта тренажа,Адаптивный комплекс для обучения(фиг. 1) содержит блок 1 моделирования объекта тренажа, первый вход которого подключен к первому выходу 2 Зпрограммного блока 2, второй и тре;тйй входы соединены через имитатор 3сигналов воздействия с вторым и третьим выходами программного блока 2,а цетвертый вход подклюцен к одному Оиз выходов блока 4 ручного управленияи первому входу вычислительного блока 5, При этом выход блока 1 моделирования объекта тренажа подключен кпервому входу сумматора 6, к второмувходу которого подсоединен выход ими 35татора 7 фоновых помех, а выход сумматора 6 электрически связан с входоминдикатора 8,Формирователь 9 сигналов подключен своими входами к выходу индикатора 8, второму входу вычислительного блока 5 и второму выходу блока 4 ручного управления, а выход формирователя 9 сигналов электрически связан с первым входом блока 10 сравнения, другой вход которого соединен с четвертым выходом программного блока 2. Адаптивный комплекс также имеет блок 11 эталонных импульсных переходных функций, второй блок 12 сравнения, один вход которого соединен с выходом вычислительного блока 5, другой вход с выходом блока эталонных 11 импульсных переходных функций, а выход второго фф блока 12 сравнения через узел 13 принятия решения соединен с одним из входов узла 14 отображения, другой 31 4вход последнего через узел 15 памяти и дешифратор 16 подключен к первому выходу блока 10 сравнения,Узел 17 регистрации через узел 18 сопряжения соединен с вторым выходом блока 1 О сравнения. Кроме того, генератор 19 шума подключен к первому входу имитатора 3 сигналов воздействия, а второй выход узла 13 принятия решения через адаптивный блок 20 и блок 21 управления параметрами объекта тренажа подсоединен к пятому входу блока 1 моделирования объекта тренажа.Блок 1 моделирования объекта тренажа (фиг. 2) состоит из трех интегра. торов 22-24.Узел имитации внешних воздействий состоит из генератора 19 шума и имитатора 3 сигналов воздействий, Блок регистрации имеет узел 18 сопряжения и узел 17 регистрации.Блок отображения информации и принятия решения содержит дешифратор 16, узел 5 памяти, узел 14 отображения и узел 13 принятия решения. При этом выход блока 21 управления параметрами объекта тренажа подключен к управляющему входу блока 1 моделирования объекта тренажа, связанного информационным выходом с первым входом сумматора 6, второй вход которого подключен к выходу имитатора 7 фоновых помех, а выход - к входу индикатора 8, при этом управляющий выход блока отображения информации и принятия решения через адаптивный блок 20 подключен к входу блока 21 управления параметрами объекта тренажа.После включения адаптивный комплекс для обуцения работает следующим образом,.Для совершенствования и контроля характеристик оператора, работа которого в человеко-машинной системе протекает по "жесткой" программе, т,е. в соответствии с положениями инструк-ции, в программном блоке 2 генерируется соответствующая программа деятельности оператора. Электрические сигналы в виде двоичных позиционных кодов с третьего выхода программного блока 2 поступают на третий вход имитатора 3 сигналов воздействия, где они дешифрируются, и с его третьего выхода поступают на третий вход блока 1 моделирования объекта тренажа, Последний вырабатывает сигналы реакции, ко5 100313 торые с его выхода подводятся на сумматор 6, где они суммируются с сигналами, поступающими на его второй вход с выхода имитатора Фоновых помех 7. Зашумленный сигнал с выхода сумматора 6 поступает на вход индикатора 8, где и предъявлятся оператору путем отображения и сигнализации, и на первый вход формирователя сигналов 9.Оператор, в соответствии с полу ченной информацией, воздействует на блок 4 ручного управления, который вырабатывает сигналы управляющих воздействий, поступающие на четвертый вход блока 1 моделирования объекта тренажа и на второй вход блока 9, в котором производится их преобразование по амплитуде и длительности для согласования режимов работы обучающего комплекса. гоПрограмма деятельности оператора, генерируемая программным блоком 2, представляет собой матрицу двоичных позиционных кодов. Каждая строка матрицы соответствует программе отра ботки той иги иной задачи в зависимости от имитируемой ситуации. Каждый разряд строки соответствует номеру органа управления блока 4.Значения "1 предписываются раз ряду в случае задействования по программе в определенные моменты времени соответствующего органа управления, а значение "0" - в случае его не- задействования31.В программный блок 2 введена также программа последовательности отображения информации в соответствии с выбранной строкой матрицы и сигналом формирователя 9 сигналов. Коды, за действованных строк матрицы, с выхода четвертого выхода программного блока 2 переписываются в блок 10 сравнения. На другой вход блока 10 сравнения с выходов блока 4 ручного управления и индикатора 8 через формирователь 7 сигналов по мере отработки оператором задач ) поступают электрические сигналы. В блоке 10 сравнения производится сравнение порядка поступления сигналов, излишние и недостающие сигналы, время поступления сигналов ( раньше, позже) с их программными значениями.В случае отклонения сигналы откло-нения передаются на узел 18 сопряжения для кодирования и дальнейшего документирования в узле 17 регистрации,1 6а также на входы дешифратора 16, который преобразует коды двоичных сигналов признаков строк и признаков отклонений в сигналы одноадресных кодов.Сигналы с выхода дешифратора 16 поступают через узел 15 памяти на первый вход узла 14 отображения для индикации числа ошибочных управляющих действий оператора и своевременностиили несвоевременности ) их выполнения.Для совершенствования и контроля эвристической деятельности оператора в программный блок 2 введена соответ" ствуоцая программа его деятельности в системе оператор - обучающий комп" лекс.Программа эвристической деятельности оператора состоит из двух подпрограмм. Первая из них предназначена для генераации начальных условий в состоянии объекта тренажа, а другая вносит изменения в динамику объекта тренажа, имитируя, тем самым, отказы каких-либо его функциональных узлов. Тренаж и контроль характеристик скорости самообучаемости ( или адаптации ) оператора производится следующим образом.Программный блок 2 генерирует сигналы псеврослучайной двоичной после" довательности, которая и задает начальные условия в состоянии блока 1 моделирования объекта тренажа, С второго выхода программного блока 2 электрические сигналы последовательности поступают на второй вход имита" тора 3 сигналов воздействия, на другой вход которого поступают сигналы с генератора 19 шума (сигналы с генератора 19 шума имитируют воздействующие факторы среды на систему опера" тор - обучающий комплекс),Поступившие на первый и второй входы имитатора 3 сигналов воздействия сигналы соответственно с генератора 19 шума и программного блока 2 умножаются. Сигнал, представляющий собой произведение указанных сигналов, с второго выхода имитатора 3 сигналов воздействия поступает на второй вход блока 1 моделирования объекта тренажа. Последний ворабаты" вает сигналы реакции, которые с его выхода подводятся через сумматор 6 на вход индикатора 8,где и предъявляются оператору путем отображения7, 10031и сигнализации. Также с выхода индикатора 8 этот же сигнал поступает наодин из входов вычислительного блока 5,Оператор в соответствий с полученной стимульной ийформацией с индикатора 8 воздействует на органы управ"ления блока 1, который вырабатываетсигналы управляющих воздействий, поступающие с его выходов на четвертыйвход блока 1 моделирования объектатренажа и на второй вход вычислительного блока . Поступившие сигналы синдикатора 8 и блока 4 ручного управ-.ления на входы вычислйтельного блока 55являются основой для определения те-кущего состояния управляющих действий оператора, которое в вычислительномблоке определяется по следующемуаналитическому выражению; 2 Огде й- импульсная переходная БФункция, усредненная повремени и характеризую"щая текущее состояниеуправляющих действийоператора; ЭОх (й) - реакции оператора настимульные сигналы, снимаемье с выхода блокаручного управленияу(й-Г) - стимульные сигналы вы 9носимые на индикатор 8;:Г - временные задержки,Сигнал, представляющий собой произ" ведение стимульного сигнала у(й- ь) и реакции оператора х (й), с выхода вычислительного блока 5 поступает на первый вход второго блока 12 сравне . ния, на другой вход которого с выхода блока 13 эталонных импульсных переходных функций также поступает эталонный сигнал, представляющий собой произведение стимульного сигнала у(й) и сигнала х(1) реакции эта. лонного оператора.Во втором блоке 12 сравнения эти сигналы сравниваются и сигнал разности текущего сигнала и эталонного, равныйа(ч:)=х (Цз(ь-с)-х (Цз(1-т),с выхода блока 12 поступает на входузла 13 принятия решения, в котором по величине разности сигналов д 7 выносится решение о соответствии текущего состояния управляющих действий конкретного индивидуума (оператора ) требуемому его состоянию, а результатрешения узлом 13 отображается узлом 11,Кроме того, введение отказов функциональных узлов объекта тренажаблока 1 осуществляется программно сиспользованием электрической связипервый выход программного блока 2 первый вход блока моделирования объекта тренажа.Рассмотрим осуществление даннымустройством автоматического выборауровня сложности решаемой оператором профессиональной задачи с учетомего текущего состояния скорости самообучаемостикоторое зафиксированона предыдущем этапе.Допустим, что оператор решает, например задачу компенсационного сленения, Также допустим, что после введения программным блоком 2, в .частности, отказа динамика объекта тренажа стала неустойчивой и инерционной,Для рассматриваемого случая динамиканеустойчивого и инерционного объектатренажа смоделирована с помощью двухпоследовательно соединенных интеграторов 23 и 21 (фиг, 3 ),Когда оператор хорошо справляетсяс решением задачи компенсационногослежения, то сигнал а (Т) (разноститекущего сигнала Х (ЦЗ(1, -7) и этатлонного ХЧ( - ,) с выхода перво.Эго компаратора, которым дополненузел 13 принятия решения и который на Фиг. 3 не представлен, поступает на второй вход узла 11 отображения, где и визуализируется световым табло., При этом величина сигнала й является количественной характеристикой самообучаемости оператора. Если же оператор не справляется с решением поставленной задачи, на что объективно указывает величина сигнала д(-), то данный сигнал с выхода второго компаратора, которым также дополнен узел 15 принятия решения и который также не представлен на Фи г, 3, поступает на вход блока 20 и влияет на его коэофициент передачи в сторону уменьшения Сиг" нал с выхода блока 20 поступает на вход блока 1 управления параметрами . объекта тренажа1 10ствий с программным блоком, подключенным через первый блок сравненияк формирователю сигналов, блоку ре"гистрации отклонений в процессе тре"нажа и блоку отображения информациии принятия решения, соединенному через второй блок сравнения с блокомэталонных импульсных переходных функций и вычислительным;блоком, подкпюченным к блоку моделирования объектатренажа и блоку ручного управления,соединенному с формирователем сиг"налов,и индикатор, связанный с вычислительным блоком и формирователемсигналов, о т л и ч а ю щ и й с я тем,что, с целью повышения эффективноститренажа, он имеет имитатор фоновыхпомех, сумматор, адаптивный блок иблок управления параметрами объектатренажа, выход которого .подключенк управляющему входу блока моделирования объекта тренажа, связанногоинформационным выходом с первым входом сумматора, второй вход которогоподключен к выходу имитатора фоновыхпомех, а выход - к входу индикатора,при этом управляющйй выход блока отоб"ражения информации и принятия решениячерез адаптивный блок подключен квходу блока управления параметраииобъекта тренажа,Источники информации,принятые во внимание при экспертизе1, Авторское свидетельство СССРпо заявке М 3250700/12,кл. 6 09 В 9/00, 1981. формула изобретения Адаптивный комплекс для о 6 учения операторов систем управления, содер жащий блок моделирования объекта тренажа, соединенный непосредственно и через узел имитации внешних воздей 9 100313Функциональное назначение блока 21 управления " изменять ыунтирующее действие на цепи интеграторов 23 и 24 объекта тренажа блока 1 под вмянием изменяющегося напряжения на вы- % ходе блока 20. В рассматриваемом случае с уменьшением сигнала на выходе блока 20 шунтирующее действие переменных "резисторов" ( усилители блока управления 21 ) увеличивается и, тем са мым, уменьшается степень инерционности и неустойчивости динамики объекта тренажа блока 1. вследствие этого уменьшается сложность задачи компенсационного слежения у оператора, За метим, что мера сложности решаемой оператором задачи компенсационного слежения точно соответствует его психофизиологическим возможностям по самообучению, 20Предлагаемое устройство позволяет повысить в среднем на 304 эффективность тренажа операторов, так как оно оптимально учитывает индивидуальные возможности операторов для работы в И недетерминированных человеко-машинных системахСо Те санов ароши 6 ЗакаТ ВНИИПИ Гпо де 1 ДО Р 5 Мо гиал ППП11т, г,П ктная,оя, ул оц А, Мотыль1573/35 осуда лам и сква витель С. А 8 М, Коштур 186 ственного коми обретений и от .1-35 РаушскаяУ Корректор МПодписноеСР ета Срытийнаб,П
СмотретьЗаявка
3387301, 22.02.1982
ПРЕДПРИЯТИЕ ПЯ А-1427, МОСКОВСКИЙ ИНСТИТУТ ЭЛЕКТРОННОГО МАШИНОСТРОЕНИЯ
ПУПКОВ КОНСТАНТИН АЛЕКСАНДРОВИЧ, АНДРЕЕВ ОЛЕГ ВАСИЛЬЕВИЧ, ПЛЕТНЕВ ИГОРЬ БОРИСОВИЧ, ПОНОМАРЕВ БОРИС МИХАЙЛОВИЧ, БУЙЛОВ ВЛАДИМИР ЛЕОНИДОВИЧ, ВЕТОШКИН ВЛАДИМИР ВАСИЛЬЕВИЧ
МПК / Метки
МПК: G09B 9/00
Метки: адаптивный, комплекс, обучения, операторов, систем
Опубликовано: 07.03.1983
Код ссылки
<a href="https://patents.su/7-1003131-adaptivnyjj-kompleks-dlya-obucheniya-operatorov-sistem-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Адаптивный комплекс для обучения операторов систем управления</a>
Буй для подъема и обнаружения информационного блока от глубоководных объектов
Номер патента: 747053
Опубликовано: 15.05.1994
Авторы: Белов, Зыков, Мовчан, Плотников, Рябов, Филиппов
МПК: B63B 22/24
Метки: блока, буй, глубоководных, информационного, обнаружения, объектов, подъема
1. БУЙ ДЛЯ ПОДЪЕМА И ОБНАРУЖЕНИЯ ИНФОРМАЦИОННОГО БЛОКА ОТ ГЛУБОКОВОДНЫХ ОБЪЕКТОВ, включающий поплавок с расположенной на нем антенной с механизмом ее выдвижения и с радиопередатчиком, а также противовес с источником питания, связанный посредством соединительного узла с поплавком, отличающийся тем, что, с целью повышения эксплуатационных параметров, механизм выдвижения антенны содержит кронштейн, смонтированный с возможностью поворота посредством втулки относительно корпуса радиопередатчика, а также пружину, при этом антенна выполнена в виде упругой металлической ленты, прикрепленной одним концом к кронштейну, пружина установлена во втулке, при этом один конец пружины прикреплен к втулке, а другой конец пружины связан с кронштейном, причем...
Устройство для моделирования эхокардиографических сигналов

Номер патента: 1599882
Опубликовано: 15.10.1990
Авторы: Бабак, Горб, Злобинская, Камышан, Кирилюк, Яблучанский
МПК: G09B 23/28
Метки: моделирования, сигналов, эхокардиографических
...мембран 4 и 5 с отряжятелями 6 жидкое рабочее тело 2 в камере корпуса сообщающейся со сжимающимися в рассмятривяемьл момент времени рабочим сильАоном создает повышенное давление. С другой стороны указан ныхмембран жидкое рабочее тело в камере корпуса сообщающейся с растягиваемым в то же самое время другимсильАоном создает пониженное давление, 40Разность давлений, создаваемая жидким рабочим телом в камерах, разделенных мембранами, обеспечивает деформацию вытягивания эластичных мембран 4и 5 в сторону с пониженного давления. 45При этом изменяется расстояние междуотражателями 6, укрепленными на мембранах 4 и 5, и датчиком эхокардиограАя (не показан), установленным какустическому окну 3, При использовании одинаковых рабочих сильфонов...
Устройство для моделирования радиолокационных сигналов движущихся осесимметричных объектов

Номер патента: 498579
Опубликовано: 05.01.1976
Авторы: Антипин, Варганов, Убиенных
МПК: G01S 7/40
Метки: движущихся, моделирования, объектов, осесимметричных, радиолокационных, сигналов
...с сервоприводом 1, радиолокационное измерительное устройство 2, электронновычислительную машину 3, блок 4 программного управления поворотом колонны с сервоприводом и блок 5 задания начального ее положения, прич ходы блоков 4 и 5 подключены ко вход вопривода 1, а входы - к соответств выходам сервопривода и ЭВМ 3, блок ния плоскости поляризации 6, вход ко подключен к ЭВМ, а выход - к при редающей антенне измерительного ус ва 2.Работает устройство следующим образом.10 Исследуемый объект 7 располагают на диэлектрической колонне с сервоприводом 1 вгоризонтальном положении. Рассчитанные наЭВМ 3 характеристики движения объекта вгоризонтальной плоскости через блок програм 15 много управления 4 поступают на сервопривод1 и поворачивают...
Приемно-передающий блок для систем управления подвижными объектами

Номер патента: 450219
Опубликовано: 15.11.1974
Авторы: Лойгом, Падур, Парве, Ряк
МПК: G08C 19/12
Метки: блок, объектами, подвижными, приемно-передающий, систем
...по двухпроводной телефонной линии через разделяющий диод 20 заряжаются от районного диспетчерского пункта питающие аккумуляторы 19.Все остальные узлы устройства выключены.Устройство в режиме передачип р и е м а. Если в рабочую зону антенны 1 индуктивной связи прибывает такси, оборудованное аппаратурой индуктивной связи и с постоянно, независимо от воли шофера работающим передатчиком, по поступающему в приемник сигналу перебрасывается триггер Шмидта 6, давая мультивибратору 8 частоту, которая сигнализирует о нахождении такси на остановке.В данной схеме триггер Шмидта 6 использован для того, чтобы избежать срабатывания мультивибратора 8 от помех и для формирования крутого фронта от медленно возрастающего напряжения, которое появляется...
Устройство для моделирования радиолокационных сигналов движущихся осесимметричных объектов

Номер патента: 289372
Опубликовано: 01.01.1971
МПК: G01S 7/40
Метки: движущихся, моделирования, объектов, осесимметричных, радиолокационных, сигналов
...отдельной реализации начальные условия изменяются случайным образом.Характеристики движения объекта, получаемые от электронной вычислительной машины 7 в дискретной форме, с помощью блоков3сопряжения вирда код - аналог преобразуются в управляющие напряжения и подводятся к сервоприводам системы вращения модели 1 объекта, обеспечивая ее вращение с заданными скоростями, При этом блоки 4 и 5 обеспечивают формирование управляющего напряжения для установки модели 1 обьекта в начальное положение относительно радиолокационной измерительной установки 8, а блоки 2 и д формируют управляющее напряжение для задания требу емой скорости вр агцения модели 1 объекта вокруг двух взаимно перпендикулярных осей.После отработки заданного цикла наблюдения...
Предыдущий патент: Устройство для оценки психофизиологических характеристик оператора систем управления
Следующий патент: Датчик тактильной чувствительности системы мягкова
Случайный патент: Вибрационная мельница