Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 938252
Авторы: Болховитинов, Эткин
Текст
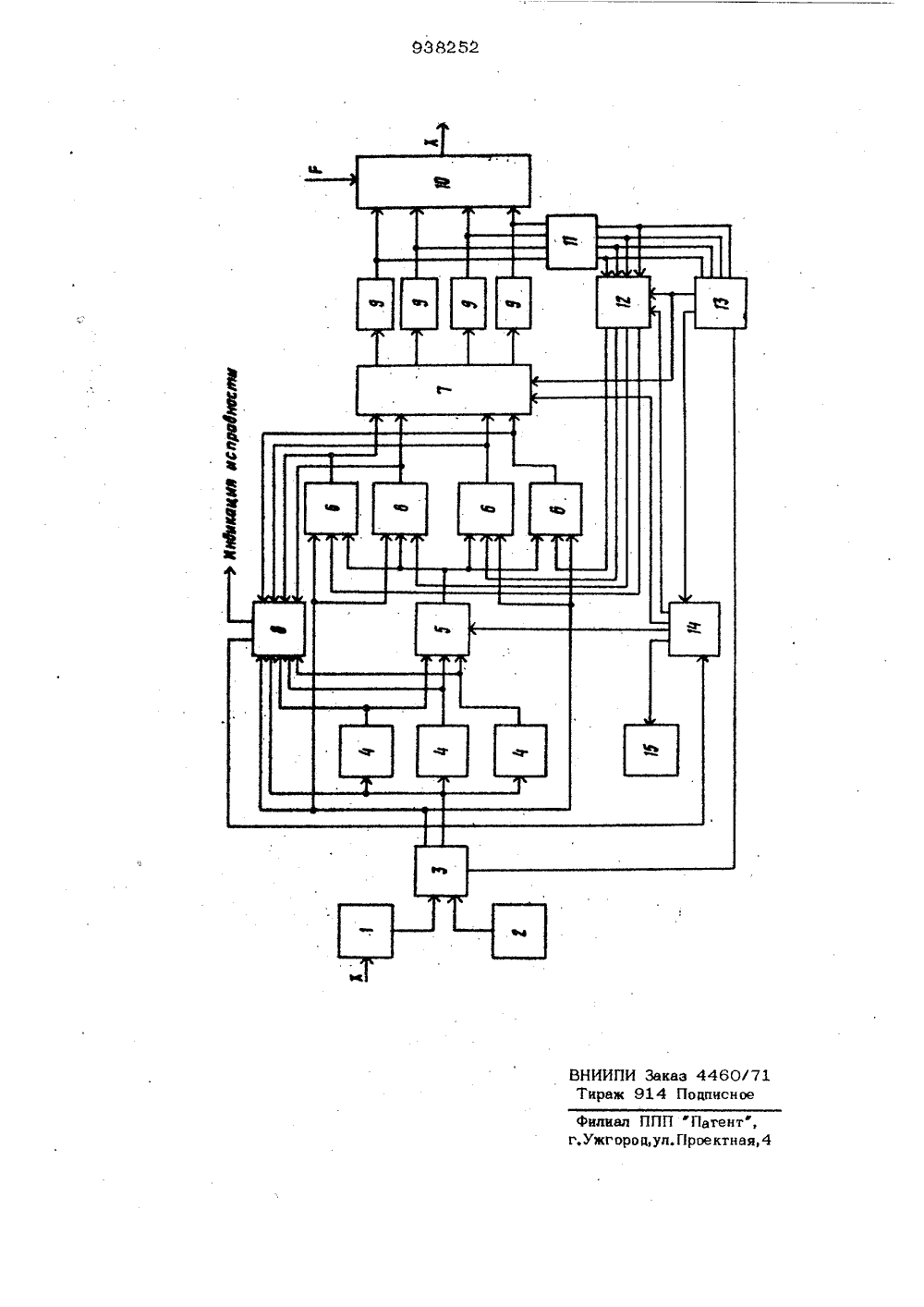
ОП ИСАНИЕИЗОБРЕТЕН ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветсникСоциалистическиеРеспублик и 938252(22) Заявлено 21,03,77 (2 ) 2464697/18-24 с присоединением заявкиМ Ъеударстакиаый комитет СССР(088,8) Опубликовано 23,06,82. Бюллетень23Дата опубликования описания 23.06,82 ао делам изобретений и открытийе судна Известния, в подобного назн вьппения надежются параллельные и 21. ых о алы управления 1 Наиболее близким к предлагаемому по технической сущности является устройство управления, которое содержит датчик регулируемого параметра и задатчик положения исполнительных устройств, связанные с входами блока переключения режимов управления, блоки формирования алгоритма управления по числу исполнительных устройств, блоки следящего управления, блоки датчиков обратной связи блок контроля исправности работы какИзобретение относитси может быть использустройствах и системахуправления и регулиротехническими требованияпроцесса, управления, встабилизации местоаол капов регулирования и блок выбора исполнительного устройства, юсод которого связан с выходом блока переключения режимов управления, два других выхода которого соединеные соответственно с входами блоков формирования алгоритма управления и блоков следящего управ ления 2 ,Недостатком известного устройства является то, что требуемые показатели надежности и качества работы усгройства обеспечиваюгся при одновременном подключении управляемых каналов;к приводам и максимальной избыточности параллельных каналов управления, что ухудшает технико-экономические хара теристики устройства.Кроме того, в устройстве отсутствует оперативное устранение возникших неисправностей, связанных с выходом иэ строя как отдельных каналов, так и селективньк приводов, что снижает эксплу атационные показатели устройства в реальных условиях.3 9382Бель изобретения - повышенйе надежности работы системы, а также улучшение ее эксплуатационных характеристик при минимальной избыточности аппаратуры системы автоматического управления.Бель достигается тем, что в систему введены блок выбора канала управления, блоки переключения каналов управления и блок переключения обратных связей, при атом выходы блоков формирования 10 алгоритма управления через первый блок переключения каналов регулирования, управлякщий вход которого соединен с выходом блока выбора канала управления, связаны с вторыми входами блоков 15 следящего управления, выходы которых через второй блок переключения каналов регулирования, первый управляющий вход которого соединен с вторым выходом бпока выбора канала управления, а второй управляющий вход - с первым выходом блока выбора испатнительного устройства, подключены к выходам исполнительных устройств, выходы которых через блок датчиков обратной связи и блок переклю- д чения обратных связей соединены с третьими входами соответствукщих блоков следящего управления, при этом второй выход блока выбора исполнительного устройства, остальные входы которого подключены к соответствукщим выходам блока датчиков обратной связи, подсоединен к входу блока выбора канала управления, второй вход которого связан с вы. ходом блока контроля исправности работы каналов регулирования, входы которого соединены с выходами блоков формирования алгоритма упрамения и бпоков следя щего управления и с вторым и третьим выходами блока переключения режимов управления, причем первый управлякщий вход блока переключения обратных связей подключен к первому выходу блока выбора исполнительного устройства, а второй управляющий вход соединен с третьим выходом блока выбора канала упраВления.1Кроме того, в систему введено устсройство индикации исправности работы блоков следящего управления, подключен- фное своим входом к четвертому выходублока выбора канала управления.На чертеже приведена блок-схемасистемы, в которой, например, испольэуется четыре блока следящего управления фсоответственно по числу исполнительных устройств, а также три блока формирования алгоритма управления, причем по 52 4степени важности решаемых системойзадач автоматического упрамения и слож сности реализации технических решений блоки следящего управления относятся к устройствам нижнего уровня иерархии, а блоки формирования алгоритма управления - к . устройствам верхнего уровня иерархии упрамения.Система автоматического управления с переключением каналов регулирования содержит датчик 1 регулируемого параметра, например датчик курса судна,эадатчик 2 положения исполнительного устройства, связанные с блоком 3 переключения режимов управления, блоки 4 формирования алгоритма управления, блок 5 переключения каналов управления, связанный с блоками 6 следящего управления. Система также содержит второй блок 7 переключения каналов управления блок 8 контроля исправности работы каналов регулирования с индикацией исправности, входы которого соединены с выходами блоков 6, которые одновременно связаны через блок 4 переключения каналов управления с входами исполнительных устройств 9. Исполнительные устройства 9 изменяют состояние объекта 10 управления по регулируемому параметру Х в соответствии с характером действу кщих возмущений. Блок 11 датчиков обратной связи через блок 12 переключения оборотных связей соединен с входами блоков 6 следящего управления с непосредственно с входами блока 13 выбора исполнительного устройства. Соответству ющий вход блока 13 связан с выходом блока 3 переключения режимов управления. Второй выход блока 3 соединен одновременно с входами блоков 4 и одним из входов блока 8. Третий выход блока 3 связан одновременно с входами блоков 6 и соответствующим входом блока 8, Выход каждого блока 4 соединен с соответ ствукщим входом блока 5 и одновременно с соответствующим входом блока 8. Первый выход блока 13 связан одновременно с одним из входов блока 12 и упрамякщим входом блока 7. Второй выход блока.3.3 соединен с входом блока 14 выбора канала управления, первый выход которого соединен с управлякщим входом блока 5 переключения каналов упрамения,второй выход - с другим управлякщим входом блока 7, третий выход - с соответствующим входом блока 12, а четвертый выход с устройством 1 5 индика5 9382526ции исправности работы блоков следящего Указанное подклпо ючение блоков 4 куправления, Второй вход блока 14 соеди- работакщим блокам 6 происходит поаботанной в блоке 14 выбэнен с вторым выходом блока 8 контро- команде, выработ ннля исправности. ра канала регулирования и поданной наСистема автоматического управления с 5 блок 5 переключения. Эт бп каючения. Эта команда блокапереключением каналов управления рабо формируется в нем по информациитает следукзцим образом,В зависимости от степени и характе- системы и ее элементо (ра изменения внешнего возмущенияи вь аботанной в блоке 8приложенного к объекту 10 управления, 10 контроля исправности работы каналовсостояние которого контролируется из- управления, первый рогопе вый выход котооого свямерением регулируемого параметра Хс помощью датчика 1, в системе произ- ности.водится формирование управляющих во: Сигнал управления, роал п авления иэ блока 4, пройдействий, поступающих на исполнитель дя таким образом через блоки 5 и 6,ные устройства 9, которые противодей- поступает на входы второго блока пествуют возмущению , обеспечивая при реключения каналов регулирования. лиэтом минимальное отклонение параметра при этом окажется,ется что в составе подХ от заданного его значения.1ключенных в данный мом нт вамй момент времени поемых в системе (в завиТак как одновременное использование 20 числу используемыхвеличины волмущения ) повсех, имеющихся на объекте 10 управле- симости от величины озмублока 13 выбора исполнительния, исполнительных устройств 9 оправ- командам блокаст ойства 9 блоков 6 следящегодано лишь при максимальных возмущени- ного устройстимеются неисправные блоки,ях , то в системе предусматривается . управления имеюих последовательное подключение (по мере 25 то подключению е е блока 4 к блокам 6 посм блока 5 будет произведено сизменения Гпосредством команд с бло- редством блока бу Рка 13 выбора исполнительного устройст-. учетом информации от блока 8, такжева на вход блока 7 переключения каналов контролирукВцег Рблоков 6.управления.тельное асп деление сигнаВ преплагаемой системе каналы регулиз 0 Окончательноераспре ероования выполнены в виде. связанных лов управления (е я (т.е. выбор соответствуюов ования) производитсямежду собой блоков 4 формирования алго- щих каналов регулирритма управления и блоков 6 следящего через втор йвто ой блок 7 переключения каналов, который соответству копие выходыуправления, построенных по отношениюдруг к другу по иерархическому принпипу, З 5 блоков 6 связывает с соответствукзцимит.е. с использованием уровней верхнего исполнительнь у Ройстлнительными устройствами, котб ествпять требуемое(блоки 4) и нижнего (блоки 6)иерархи- рые и будут осущестзменение (например, стабилизацию) реческого управления, что позволяет, в от- измен ни ( Р РО.личие от известных устройств Управления, гулиру Р Ремого па аметра Х объекта 1более эффективно решить задачу повыше Координироо ини ванное (с точки зренииоспособности и эффективности сисния надежности при резервировании кана- работоспособнтемы) управление работой блока 7 пролов уп авления.- В предлагаемой системе осуществлено изводитсяупря с помощью команд, поступающих на его управляющие вхоцы (первыйрезервирование (например, трехкратное) щих н у р1,4только блоков 4 формирования алгоритма 45,и вторРвто ой) с вто ого вькода блокаи пе вого выхода блока 13, причем коуправления, работа которых в составеманда блока 13 приводит ок переи рбп 7системы определяет основной режим ееиспользования при автоматическом упр ав- ключения в состояние "готовности иленин состояний объекта 10, причем несет в себе информацию о наличии вотключение по мере отказа блоков 4 данный момент времени сво дныхХ) испоппроизводится посредством работы перво- ( р(не аботакзцих на параметрес бжнительных устройств 9, а команда сго блока 5 переключения каналов управ 6 ка 14 . является дпя окабп 7 запускаления и таким образом, чтобы блокикзцейф и разрешает оку осбл 7 уществитьчисло которых в системе определяется кзц Рбп в 610 подключение и переключение оковколичеством имекзцихся на объекте 155ным усфРк соответствующим исполнительнымисполнительных устройств 9, совместнос подключенным работоспособным блоком ройствам 9.ость с абаавтоматичес- Укаэанная последовательность сра4 об азовывали бы канал автомаРтывания блока 7 определяет однозначноекого управления, 7038252прохождение управлякщих сигналов с блоков 4 и 6 на своиф исполнителЬныеустройства 9, что, в свою очередь, обеспечивает нормальное и безаварийноефункционирование системы в случае отказов блоков 4 и 6, подключения исправных блоков 6, а также переключенияэтих блоков на новые (включение по мере потребности блоком 13 через блок7) исполнительные устройства 9 1 эВ случае, когда в системе производится управление от эацатчика 2 (на. пример, по желанию. оператора или приполном отказе блоков 4), второй выходблока 3 переключения режимов управле фния непосредственно подсоединяется к соОтветствукщим входам блоков 6, подключение которых по описанному принципу к устройствам 9 происходит такжес помощью блока 7. 26Если при работе системы Оказывается,что устройства 9 полностью использованы, а блок 8 вырабатывает, информациюоб отказе блоков 4 и 6, переключенияс помощью блоков 5 и 7 устройств 9 на 25работоспособные блоки 4 и 6 не производится, а информация об этом состояниисистемы образуется на дополнительномустройстве 15 индикации исправностикоторое фэапускается сигналом с чувертого выхода блока 14 выбора каналарегулирования и выдает оператору информацию об отказе с указанием конкретно, го блока.4 или блока 6.формирование команды Запрет" наработу блоков 5 и, 7 переключений производит блок 14 по команде, поступившей на него с второго выхода блока 13,одновременно управлякщего в процессеработы системы блоком 12 переключения йобратных связей для надлежащего соединения входных сигналов блока 11 обратной связи с соответствукщими входамиблоков 6. После устранения неисправностей блоков 2 и 6 работоспособность системы в целом восстанавливается и ееработа происхоаит по Описанному циклуи последовательности,Таким образом, благодаря введению в предлагаемой системе блоков 14 выЗО бора канала управления, 5 и 7 переключэющ каналов, 12 переключения обратных связей и устройства 15 индикации исправности работы блоков 4 и 6 при всех работакщих в данный момент време фЯ ии устройствах 9, а также связей между вновь введенными и известными блоками, в системе обеспечивается координированное переключение каналов управления помере отказов ее блоков и канадов с учетом используемого в момент эксплуата.ции системы, числа исполнительных устройств 9.Это позволяет, в отличие от извесиных устройств, повысить надежность работы и улучшать эжплуатационные характеристики системы автоматическогоуправления с одновременным сокращениемнеобходимого (из требуемых показателейнадежности) обьема резервированногоаппаратурного состава системы.Предлагаемая система может бытьиспользована при автоматическом управлении как при одном исполнительном устройстве, так и в общем случае, с несколькими исполнительными устро йствами,выбор которых производят из условияэкономии ресурса и увеличения срока ихслужбы,1. Кроме того она может бьгть примене 1на, когда имеются из практических соображений ограничения на время работы исполнительных устройств или на число их включений по максимуму развиваемого управлякщего воздействия,Формула изобретения1. Система управления, содержащая датчик регулируемого параметра и эадатчик положительных. устройств, связанные с входаьи блока переключения режимов управления, по числу исполнительных устройств блоки формирования алгоритма управления, блоки следящего управления, блок датчиков обратной связи, блок контроля исправности каналов управления и блок выбора исполнительного устройства, вход которого соединен с выходом блока переключения режимов управления, два выхода которого соединены соответственно с входами блоков формирования ашоритма управления и блоков следящегоуправления, о т л и ч а ю щ а я с ятем, что, с целью повышения надежности системы, в нее введен блок выбора ханала управления, блоки переитючения каналов управления и блок переключения обратных связей при этом Выходы блокОВ Формирования алгоритма управления через первый блок переключения каналов управления, управлякщий вход которого соединен с выходом блока выбора каналауправления, связаны с вторыми входамиблоков следящего управления, выходы9 9382 которых через второй блок переключения каналов управления, первый управлякзций вход которого соединен с вторым выходом блока выбора канала управления, а второй управлякщий вход - с первым выходом 3 блока выбора исполнительного устройства, подключены к входам исполнительных устройств, выходы которых через блок датчиков обратной связи и блок переклк- чения обратных связей соединены с тре- й тьими входами соответствукзцих блоков следящего управления, при этом второй выход блока выбора исполнительного устройства, остальные входы которого подключены к соответствукзцим выходам блока датчиков обратной связи, подсоединен к входу блока выбора канала управления, второй вход которого связан с выходом блока контроля исправности каналов управления, входы которого 20 соединены с выходами блоков формирования алгоритма управления и блоков 82 10следящего управления, и с вторым и третьим выходами блока переклкяения режимов управления, причем первый управлякщий вход блока переключения обратныхсвязей подключен к первому выходу блока выбора исполнительного устрой:тва,а второй управлякщий вход соединен стретьим выходом блока выбора каналауправления2. Система по.п.1, о т л и ч а ющ а я с я тем, его, в нее введено устройство индикации исправности работыблоков следящего управления, вход которого подключен к четвертому выходублока выбора канала управления.Источники информациипринятые во внимание при экспертиэе1. Патент фРГ М 1538883,кл. 605 В 9/02, апублик. 1972.2. Патент Японии % 50-12072,кл. 6 05 В 11/11, опублик. 1978 (про.тотип).ВНИИПИ Заказ 4460/7 Тираж 914 Подписное фипиал ППП "Патент", .Ужгород,ул. Проектная
СмотретьЗаявка
2464697, 21.03.1977
ПРЕДПРИЯТИЕ ПЯ Г-4372
БОЛХОВИТИНОВ ВИКТОР КОНСТАНТИНОВИЧ, ЭТКИН ВИКТОР ВУЛЬФОВИЧ
МПК / Метки
МПК: G05B 11/00
Метки:
Опубликовано: 23.06.1982
Код ссылки
<a href="https://patents.su/6-938252-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Устройство для автоматического переключения каналов связи

Номер патента: 1774514
Опубликовано: 07.11.1992
Авторы: Лычев, Стишковский
МПК: H04L 12/12
Метки: каналов, переключения, связи
...Если приемный тракт РК исправен, триггера 26 ивключение на:индикаторе 28на прямом выходе первого блока 1 контро- сигнальной лампы, свидетельствующей оля и на соответствующих входах второго - 20 неисправности ПК. Одновременно при испчетвертого и восьмого элементов И.6-8 и равном приемном тракте ОК данной стан 23 действуетуправляющийсигнал. При не- ции срабатывает девятый элемент И 24,исправности приемного тракта РК управля- подтверждая состояние третьего триггерающий сигнал действует на инверсном 27 в прежнем положении.выходе первого блока 1 контроля и соответ Таким образом, на каждой сторонествующих входах первого и седьмого эле- (станциях А и Б) постоянно отображаетсяментов И 5 и 15 и четвертого элемента ИЛИ информация о состоянии...
Устройство для автоматического переключения каналов

Номер патента: 1780170
Опубликовано: 07.12.1992
МПК: H03K 17/00
Метки: каналов, переключения
...5.В течение действия установочного сигнала на выходе первого детектора 3 иэ-за инерционности каналов б и 7 или несинхроннос 1 ь включения напряжений питания возможно появление сигнала ложной неисправности, соответствующего уровню логического "0". Зто не вызывает изменения выходного сигнала элемента 4 ИЛИ и элемента 9 И и не переключает каналов б и 7,К моменту завершения действия установочного сигнала в устройстве заканчиваются переходные процессы и на выходе первого детектора 3 формируется сигнал логической "1", который по окончании действия установочного сигнала, когда на выходе времязадающей цепи 1 формируется сигнал логического "0", подтверждает логическую "1" на выходе элемента ИЛИ 4 и, следовательно, соединение подключения канала 6...
Устройствю для переключения каналов вычислительной системы

Номер патента: 383047
Опубликовано: 01.01.1973
МПК: G06F 9/00
Метки: вычислительной, каналов, переключения, системы, устройствю
...выдаются через схемы И 17, 18 и 19 на схему сравнения 20, При совпадении кодов результатов во всех разрядах схема сравнения вырабатывает сигналы сравнения, которые через сборку 21 и соответствующие схемы И 22, 23 и 24 фиксируются в триггерах 10, 11 и 12 мажоритарного блока.Если совпадают хотя бы два из трех результатов на выходе элементов ИЛИ 25, 26 и 27 блока анализа вырабатываются сигналы исправности, а на,выходах элементов НЕ328, 29 и 30 - сигналы неисправности соответствующих каналов.Сигналы исправности (неисправности) с выхода блока анализа поступают в коммутатор каналов, который подключает выходной регистр первого из исправных каналов к выходу ВС Л с помощью схем И 32, 33 и 34 схемы ИЛИ 35, схем И 3 б и 37, Если мажоритарный блок...
Устройство для переключения каналов вычислительной системы

Номер патента: 602946
Опубликовано: 15.04.1978
Автор: Плясов
МПК: G06F 9/00
Метки: вычислительной, каналов, переключения, системы
...входов блока 6 разрешения анализа. 4Выходы первых и вторых элементов И 20 - 25 блокировки соединены через первый элемент ИЛИ 26 с первым входом элемента И 29 установки, второй вход которого соединен через второй элемент ИЛИ 27 с первой группой входов блока 6 разрешения анализа. Выход элемента И 29 установки соединен с входом триггера 28 разрешения анализа, выход которого подключен к выходу блока 6 разрешения анализа.Устройство работает следующим образом, Мажоритарный блок 5 сравнения попарно сравнивает сигналы, поступающие с информационных выходов каналов 2, 3, 4, и при несравнении вырабатывает сигналы, поступающие с его выходов на первую группу входов блока 6 разрешения анализа и на входы блока 7 анализа. При нали ши сигнала...
Устройство для переключения каналов вычислительной системы

Номер патента: 661551
Опубликовано: 05.05.1979
МПК: G06F 9/00
Метки: вычислительной, каналов, переключения, системы
...вычислительной системы результат, полученный в первом канале. Одновременно прямые и инверсные сигналы с выхода мажоритарного блока 2 сравнения по шинам 31-36 поступают в блок 5 фиксации состояния каналов на элементы ИЛИ 13-15 и элементы И 16-17. На выходах элементов И 16-17 отсутствуют сигналы неисправности каналов.По сигналу от таймера, поступающему с выхода 37 на элементы И 19-21, производится опрос состояния каналов, При этом на выходы счетчиков 22-24, предварительно установленных в исходное состояние сигналом по входу 38, сигналы не поступают и счетчики и остаются в исходном состоянии,соответствующем отсутствию сбоев (отказов) в каналах 9. Прй подаче сигнала на вход 39 через вентили 25-27 информация об отсутствии сбоев в каналах...
Предыдущий патент: Следящая система
Следующий патент: Цифровой регулятор
Случайный патент: Транспортер