Следящий электропривод
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 903804
Авторы: Кетурка, Козлов, Французович






Текст
Союз СоветсимхСоцмалмстмчесии кРеспублик 6 ) Дополнительное саид-в 22) Заявлено 05.02/18-2 4 (51 287 5 В 11/2 с присоединением заявки вударствогный квинтет СССР(54) СЛЕДЯШИЙ Иэобреоматичес ие относит к системе а ия и может связан с вр м датчика 23,К недостаткам известного устройстваотносятся ограниченная точность слежения, поскопьку при изменении нагрузкиили скорости врашения возникает разностьугповых попожений входного и выходного валов в виде ошибки, величиной до- где и - число эпектрической редукциидпя многополюсных датчиков ипи передаг 0и . точное отношение между чувствитепьнойосью объекта и .датчиком. Известная следящая система предназначена дпя работы в устройствах автоматики и вычиспит%тельной техники, где требования к еединамической точности понижены, учитывается лищь ее статическая точностьпри отработке угпа рассогласования, ане в динамике переходных процессов, таким образом допускается испопьзованиедвух каналов регупированиягрубогои точного, что в случае непрерывной работы спедяшего эпектропривода в аиро;ком диапазоне изменения скорости привот кого регупированпопьзовано в радиостроении итроении.Известен следящий электропривод, со держаший в цепи управления исполнительным эпектродвигатепем сепьснн и синхронный тахогенератор 13,Однако кинематически взаимосвязанный тахогенератор не удовлетворяет требованиям по надежности из-эа спожност кинематики, и по точности, из-за несовпадения характеристик усипитепей, применяемых в электронной схеме управпения. быть ис приборос Наиболее близким по техниности к нредпагаемому явпяетсшая система, содержащая дат,емник, выход которого через уподключен к испопнитепьномудвигателю, электронную схемуния, вход которой подключен к,а выход - к.усилителю, причемлопните пьного двигателя через еской сущя спедячик и присипитепь пектро- управпедатчику, рор ис- редуктор ОПИСАНИЕ 9 ОЗ 8 О 4 ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУВ Злах 54 фф 8 где ЕЯ 3 903дит к постоянным копебаниям угпа рассогпасования. Кроме того, работа приводного электродвигатепя при неизменноммоменте нагрузки в усповиях меняющейся скорости требует пропорциональногоизменения мощности на его валу, чтоможет быть обеспечено.описанной системой при неизменном коэффициенте усиления усипитепя путем изменения угла рассогпасования и при увеичении скорости,практически переходом на грубый капаяслежения, а также к перерегупированию,т.е. ошибка снижения может достигнуть360, К недостаткам системы можнооотнести бопьшое чиспо соединительныхпроводов, поскопько связь между датчиком и приемником осушествпяется нетопько сигнапьными пиниями, но и двухпроводной пинией питания, что при бопьшой удапенности датчика от приемникаиногда неприемлемо, а также относитепьно спожную эпектронную схему управпения и напичие эпектромеханического перекпючаюшего бнока, что снижает надежность системы,Цепь изобретения - повышение точности слежения, устойчивости в широкомдиапазоне скоростей и надежности работы,Эта цель достигается тем, что в спедяший эпектролривод, содержащий датчики приемник угпового попожения, кинематически связанный через редуктор с исполнитепьным двигатепем, введены после-доватепьно соединенные выпрямитепь, пороговое устройство и эпектронный ключ,выходом подкпюченный к двигатепю, ипоспедоватеньно соединенные детекторогибающей, формироватепь импупьсов, одновибратор, интегратор, выход которогосоединен с инверсным входом порогового устройства, причем вход выпрямитепя подкпючен к выходу приемника углового попожения, а вход детектора огибаюшей - к выходу датчика угпового попожения.На фиг. 1 представпена бпок-схемаспедяшего эпектропривода; на фиг. 2 временные диаграммы, поясняющие процесс; на фиг. 3 - то же, при увеличивающейся скорости.Следящий эпектропривод содержит датчик 1 и приемник 2 углового попожения,соединенные пинией связи, например сепьсинную нару в трансформаторном режиме,испопнительный эпектродвигатепь постояниого тока, кинематически связанныйчерез редуктор 4 с приемником 2 углавого попожения, поспедоватепьно соединенные детектор огибакяцей 5, формиро 804 4ватель 6 импупьсов, одновибратор 7 и интегратор 8, выпрямитепь 9, подкпюченный к выходу приемника 2 угповогопопожения, пороговое устройство 10, управляюший вход 11 которого подкпючен квыходу выпрямитепя 9, инверсный опорный вход 12 - к выходу интегратора 8,а выход - ко входу кпюча 13, выход которого подкпючен к испопнительному эпектродвигатепю 3 постоянного тока.Спедяший привод работает спедуюшимобразом.Пульсирующий магнитный поток обмотки возбуждения сепьсин-датчика 1 15индуцирует в пучах обмотки синхрониза-,ции ЭДС. Е Е . цж(- ю)В+ ао) о. где Е- наибольшее действующее значение ЭДС, возникаюшее впуче обмотки синхронизации;В - угол поворота ротора датчикаотносительно нулевого положения.Линейная ЭДС, индуцнруемая во втором и третьем лучах обмотки синхронизации сепьсин-датчика 1, модупируется по законуЕ : 4 Т Е ах яи Я й и + ),г,где и - скорость врашения ротора,об/ед. времени;- время;З 5 . - начапьное смешение роторасельсин-датчика 1.Таким образом, огибаюшая пинейнойЭДС несет информацию о скорости вращения ротора сепьсин-датчика 1, ДанФц ный сигнап поступает на входы детектора огибаюшей 5, выпопненного в виде по-спедоватепьно соединенных двухполупериодного выпрямитепя и зарядной цепи(на схеме не показаны), на выходе кото 45 рого образуется пупьсируюший сигнап,форма которого и частота соответствуетогибающей линейной ЭДС, т.е. соответствует скорости вращения ротора сепьсин-датчика 1.56 . В обмотке возбуждения приемника 2наводится выходная ЭДС промодулированная позакону- максимапъное значение выходной ЭДС;- угоп расеогпасования междуприемником и датчиком.04 6рассогпасования 9, достичь требуемой зависимости скважности импупьсов питания эпектродвигателя 3 (дпитепьность импупьсов питания) от скорости привода и прямой зависимости привода в соответ.ствии с изменением его скорости.Данная функциональная связь обеспечивается путем формирования опорного напряжения, поступающего на инверсный опорныи вход 12 порогового устройства ,10, в зависимости от скорости спеже,ния. Дпя этого на выходы детектора огибающей 5 поступает пинейное напряжение с линии синхронной связи датчика,1 с приемником 2. Детектор огибающей 5 выпопнен в виде поспедоватепьно соединенных:двухпопупериодного выпрямителяи зарядной цепи (на схеме не показаны)и подключен ко входу формироватепя 6,например порогового эпемента, которыйимпупьсируюший сигнап с выхода детектора огибаюшей 5 преобразует в прямоугопьные импупьсы, частота следованиякоторых равна частоте пупьсации. Сформированный сигнап поступает на входодновибратора 7 (например, задержанного мупьтивибратора), на выходе которого формируются импупьсы, нормированные по длительности (опредепенной хронируюшей цепью одновибратора), с частотой следования, равной частоте входногосигнала. Импульсы с выхода одновибратора7 поступают на вход интегратора8, на выходе которого вырабатываетсяпостоянное напряжение, уровень которогосоответствует интеграпу напряжения навходе за период следования импупьсов,35С другой стороны, дпя увеличения скорости вращения вала исполнительного электродвигателя требуется уменьшение скважности импульсов напряжения, питающих эпектродвигатепь 3, т.е. увепиче ние их длитепьности при постоянном периоде спедования, что в свою очередь увеличиваети мощность на его валу, при постоянном моменте нагрузки. При выбранном способе формирования импупьсов управпения электродвигателя 3 это возможно путем увепичения угла рассогласования 6 при увеличении скорости при постоянном пороге сравнения Е=ооив 1 порогового устройства 10, т,е. увеничения амплитуды сигнапа Г 0, что приводит к копебаниям угпа 8 в зависимости от скорости спежения ипи - уменьшению динамической точности.Регулирование порога срабатывания55 порогового устройства 10 в зависимости от скорости привода Й(у) позвопяет при неизменной амплитуде выходного сигнала приемника 2 т,е. при неизменном угпе Временные диаграммы описанного процесса при увепичиваюшейся скорости приведены.на фиг. 3,где О - пупьсируюший сигнал на выходе детектора огибающей 5;1 - порог срабатывания формироватепя;Ор - импупьсы на выходе формироватепя 6;Т .- период следования (Т т Т г ТпРиЧ С Ч 5)О 0- нормированные по дпитепьности и амплитуде импупьсы навыходе одновибратора ,ц=йолИ);Цнапряжение на выходе интегратора (заштриховано) при увепичиваюшейся скорости,Опорное напряжение, вепичина которого пропорционапьная скорости слежения,поступает на инверсный опорный вход12 порогового устройства 10,5 9038С выхода приемника 2 напряжение обмотки возбуждения, выпрямленное выпрямитепем 9, поступает на управпяющий вход 11 порогового устройства 10 в виде импупьсов, частотой следования 100 Гц и амплитудой, зависящей от уг- па рассогласования. При опредепенном угле рассогласования Э на опредепенном уровне срабатывания порогового устройства 10, на выходе последнего фор О мируется серия импупьсов, отпираюшая кпюч 13, который подает питающее напряжение на испопнитепьный двигатепь 3 и доворачивает его ротор до согласованного попожения. ВремЕнные диаграм мы выходного сигнала выпрямитепя пред,ставлены на фиг. 2 а, где вепичина амппитуды 1 е дана при постоянном угпе рассогпасования 8, а 1 и- пороги срабатывания порогового устройства 10, 20 на фиг. 2 б и в показаны импупьсы напряжения питания двигатепя 3 - Оф, формируемые последовательно соединенными пороговым устройством 10 и ключом 13 из импупьсов выпрямпенного напряжения, 25 поступаюшего с выпрямитепя 9.Из временных диаграмм (фиг. 2) спедует, что при одном и томже угпе рассогласования 6 путем изменения порога срабатывания порогового устройства 1 0 30 можно изменить ширину импупьсов напряжения питания испопнитепьного электродвигателя и мощность, развиваемую на его валу.903804 7Пороговое устройство 10 выполненона основе дифференциального усипитепяс глубокой положительной обратной связью, прямой вход которого является управпяющим 11 входом порогового устройства 10, а к инверсному входу усипитепя через инвертор подключен опорныйвход 12 порогового устройства. Такимобразом, при изменении скорости опорное напряжение на инверсном входе днфференциапьного усилителя меняется в обратной зависимости по отношению к скорости, что приводит к,уменьшению порогов срабатывания порогового устройства10 при увеличении скорости привода. Конкретное исполнение порогового устройства 10 на схеме фиг. 1 не раскрыто иможет иметь другие варианты,Пороговое устройство 10 вырабатывает прямоугопьные импупьсы, управпя- щющие кпючом 13, который коммутируетцепь питания испопннтепьного электродвигателя 3, например якорную цепь двигателя постоянного тока, при этом длительность импупьсов напряжения литания 25электродвигателя равна длительности импульсов управления, которая определяется скоростью слежения,,Поскольку фронты выпрямленных синусондапьных сигналов на небопьших участках, практически линейны, можно принять,что пороговое устройство 10 управляется с выпрямителя 9 импульсами треугопьной формы, Таким образом, осуществляется широтно-импульсная модуляция питания эпектродвигателя 3 импупьсами,дпитепьность которых зависит от скорости привода, при постоянной частоте сле-дованиям 100 Гц.С ростом длительности импульсов рас 40тет мощность на вапу электродвигателя3, что при постоянном моменте нагрузкиобеспечивает пропорционапьное возрастание скорости,На фиг. 2 представлены временные45диаграммы, поясняющие процесс;а - сигнал, поступающий на вход порогового устройства 10;о - импупьсы управления двигатепемпри пониженной скорости привода;- импупьсы управпения двигатепем503 при повышенной скорости привода,где- порог срабатывания при скорости- порог срабатывания при скорос55ти /У- напряженке питания двнгатепя,при этом Ч 4 ЧФ 8Изменением порога срабатыванию Епорогового устройства 10 в обратной зависимости по отношению к скорости привода обеспечивается регулируемая обратная связь, что позволяет обеспечить постоянство угла рассогласования при меняющейся в широком диапазоне скоростиспежения, и следовательно повысить динамическую точность.Устойчивость системы обеспечивается выбором пределов изменения порога Е.Надежность предпагаемого эпектропривода увеличивается путем исключенияэпектромеханического перекпючаюшегобпока и уменьшением количества проводников связи приемника с датчиком.Таким образом, включение в предлагаемый следящий эпектропривод последовательно соединенных детектора огибающей, входы которого подкпючены к линиисвязи датчика с приемником, формирова-теля, одновибратора и интегратора, атакже выпрямителя, подключенного к выходу приемника, порогового устройства,управляюший вход которого подкпючен квыходу выпрямитепя, инверсный опорныйвход - к выходу интегратора, а выходчерез ключ - к исполнительному электродвигателю, позволяет повысить точность,устойчивость и надежность работы привода в широком диапазоне скоростей.формула изобретенияСледящий электропривод, содержащийдатчик и приемник углового положения,кннематически связанный через редукторс исполнительным двигателем, о т л ич а ю ш и й с я тем, что, с целью повышения . точности с пежения, устой чивости в широком диапазоне скоростей и надежности работы, в него введены поспедоватепьно соединенные выпрямитель,пороговое устройство и электронный ключ,выходом подключенный к двигатепю, ипоследовательно соединенные детекторогибающей, формирователь импульсов,одновибратор, интегратор, выход которого соединен с инверсным входом порогового устройства, причем вход выпрямителя подключен к выходу приемника углового положения, а вход детектора огибающей - к выходу датчика углового положения.Источники информации,принятые во внимание при экспертизе1.,Авторское свидетельство СССРМ 433447, кп, 6 11 В 5/00, 1974.2, Авторское свидетепьство СССРМ 318906, кн. 0 05 В 11/06, 1971903804М 0Составитель В. Грибоваедактор Г. Волкова ТехредЛ, Пекар Корректор О. Би Заказ 112/27Тираж 907 Подписн ВНИИПИ Государственного комитета СССРпо делам изобретений и открытий 113035, Москва, Ж 35, Раушскаи набд. 4/пиал ППП фйатент, г. Ужгород, уп. Проектная, 4
СмотретьЗаявка
2879917, 05.02.1980
НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ ЭЛЕКТРОГРАФИИ
КЕТУРКА АЛЬБИНАС ИОНОВИЧ, ФРАНЦУЗОВИЧ ЗБИГНЕВ ВЛАДИМИРОВИЧ, КОЗЛОВ ВИКТОР БОРИСОВИЧ
МПК / Метки
МПК: G05B 11/26
Метки: следящий, электропривод
Опубликовано: 07.02.1982
Код ссылки
<a href="https://patents.su/6-903804-sledyashhijj-ehlektroprivod.html" target="_blank" rel="follow" title="База патентов СССР">Следящий электропривод</a>
Многоканальное устройство для обработки информации датчиков с частотным выходом

Номер патента: 1196892
Опубликовано: 07.12.1985
Автор: Карпицкий
МПК: G06F 17/00
Метки: выходом, датчиков, информации, многоканальное, частотным
...значениеначальной разностичастот, если ЬГ(1)=0; - время, в течение которого мгновенное значение Ь 1 ( О (внут- .ри интервала и м); " мгновенное значение начальной разности частот, если Ь Е0 ф иом ЬХ, И)=О,то Ь 1, Ф Н= Оо Переходя к средним значениямчастот, выражение (5) Можно преобразовать следующим образом: 25 ЗО где Ь 2 - среднее значение часср+ототы Ь 1+ за вре 1мя Сио,+Ьср-) - абсолютная величинасреднего значения час тоты за времягде Ь ср Выражение (4) может быть преобразовано следующим образом:( иом Л р й о( Ь 1 иом ь о РИФМ ГДЕ 1 ИВм+ а 1 ф -ф изм среднее значение начальной разности частотза время измерения;мгновенное значение начальной разности частот;время измерения, - время, в течение которого мгновенное значение Ь 1 (10...
Устройство для сопряжения датчиков аналоговых сигналов с вычислителем
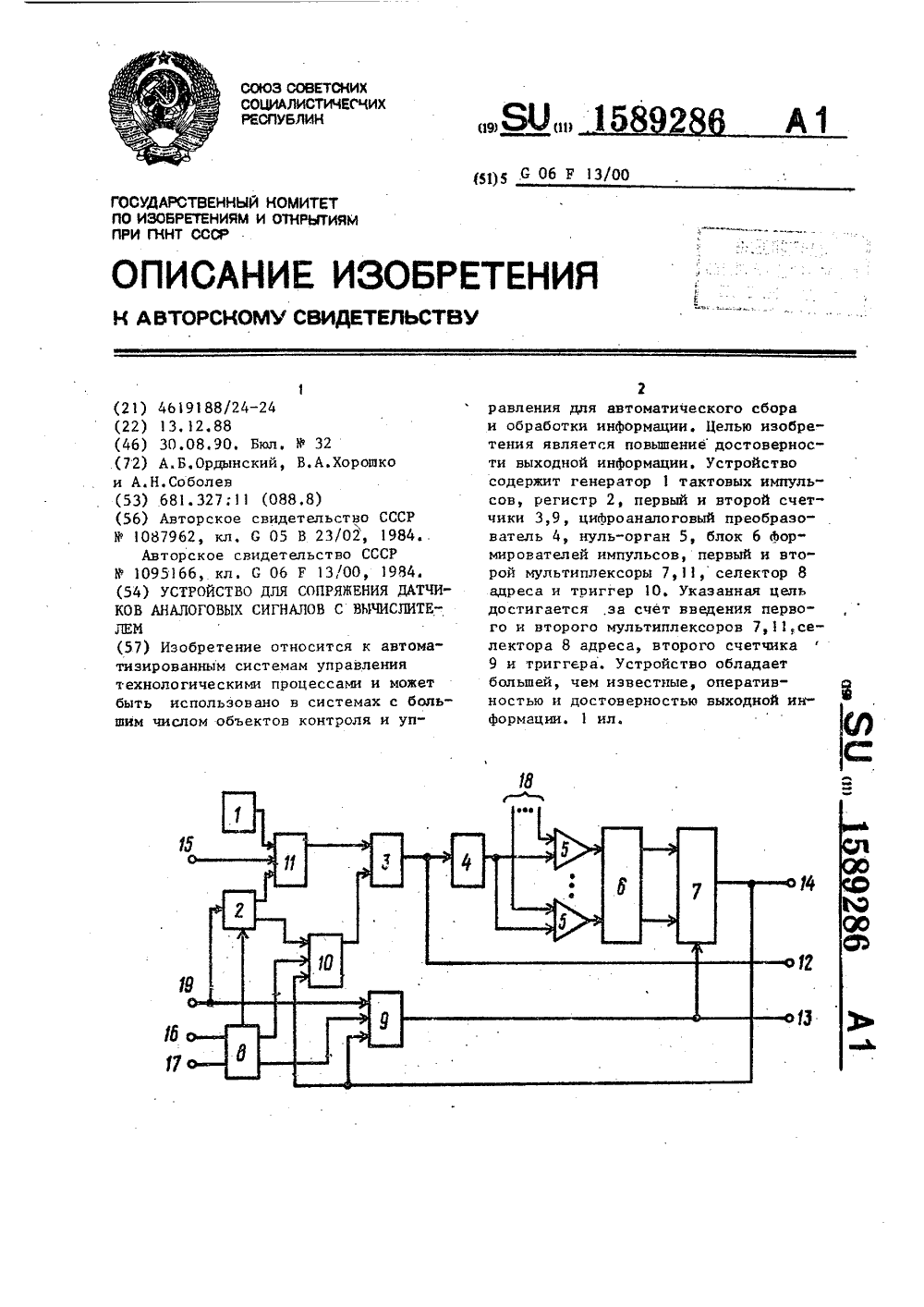
Номер патента: 1589286
Опубликовано: 30.08.1990
Авторы: Ордынский, Соболев, Хорошко
МПК: G06F 13/00
Метки: аналоговых, вычислителем, датчиков, сигналов, сопряжения
...ляется циВровой информацией, поступающей по информационному входу 19, и сигналом записи, Формируемым на третьем выходе селектора 8 адреса и поступающим на вход записи второго 30 счетчика 9. Характерной особенностью используемого селектора 8 адреса является наличие входа 17 адреса и входа 16 записи.Для более полного представления о принципе работы устройства предположим, что в первой фазе первичная цифровая информация записывается во второй счетчик 9 и определяет номер 1-го нуль-органа, т.е. необходимо 40провести анализ состояния соответствующего датчика, Во второй фазе задания условий работы устройства цифровая входная информация записываетсяв регистр 2, т.е. выбирается темп и 45 цикличность работы В третьей Вазена втором выходе...
Измерительное устройство для гравиметрических датчиков с нелинейным частотным выходом

Номер патента: 736035
Опубликовано: 25.05.1980
Авторы: Головань, Морозов, Степаненкова
МПК: G01V 7/16
Метки: выходом, гравиметрических, датчиков, измерительное, нелинейным, частотным
...10, а обмотка двигателя 7 аналогичным образом подключена к генератору 8 через смеситель 1 и усилитель 12. Для подключения предложенного измерительного устройства к гравиметрическому датчику 13, выход датчика 13 соединяется со входами смесителей 9 и 11. Режим работы смесителей 9 и 11 устанавливается таким, чтобы выходная частота смесителя 9 была равна сумме частот генератора 8 и датчика 13, а выходная частота смесителя 11 - разности этих же частот.Устройство работает следующим образом.Вначале частота генератора 8 устанавливается равной частоте датчика 13. При этом электродвигатель 1 приходит во вращение, а вал электродвигателя 7 не вращается, поскольку частота питающего напряжения равна нулю. При изменении ускорения силы тяжести...
Устройство для проверки датчика случайных чисел

Номер патента: 235398
Опубликовано: 01.01.1969
Авторы: Бойченко, Галустов, Городецкий, Леусенко, Поздн, Таганрогский, Тотаев
МПК: G06F 11/28
Метки: датчика, проверки, случайных, чисел
...необходима для выдачи импульса в момент совпадения импульса с усилителя-формирователя 7 и отрицательного потенциала на одной из шин дешифратора.15 Усилитель-формирователь 7 преобразует потенциальный,выход триггера 8 в импульс.Триггер 8 определяет момент окончания серии. Счетчики 9 - 11 фиксируют число серий контролируемой длины, число импульсов оп роса, общее количество серий соответственно,Вентили 12 - 14 закрывают входы счетчиков после заполнения счетчика 10.В целом работа устройства проверки ДСЧна случайность методом серий заключается в 25 следующем.Случайная последовательность чисел с ДСЧ,преобразованная в двоичный внд, подается на вход двоичного счетчика 4, где с помощью дешифратора устанавливается серия контроли руемой...
Частотное пороговое устройство

Номер патента: 815893
Опубликовано: 23.03.1981
Автор: Самусь
МПК: H03K 5/26
...5, к установочному входу делителя 2,ко второму входу элемента ИЛИ 7 и черезблок 8 предустановки ко второму установочному входу делителя 3. Выход 12 триггера 5является выходом устройства.Устройство работает следующим образом,В исходном состоянии триггер 4 находится в таком положении, при котором с еговыхода на вход элемента И 6 поступаетразрешающий потенциал, первый импульсконтролируемой частоты 1 поступает через з 5элемент И 6 на вход 10 генератора 1 изапускает его. При этом на выходе генератора 1 появляется последовательность импульсов опорной частоты 1 , первый импульс которой совпадает во времени с первым импуль 4 Осом измеряемой последовательности. Это возможно, если использовать в качестве генератора 1 генератор с ударным...
Предыдущий патент: Следящая система
Следующий патент: Пневматическое управляющее устройство
Случайный патент: Комплексный измеритель азимута и дальности