Устройство для управления установкой направляющих линеек
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 876226
Авторы: Кириченко, Кузин, Оружинский, Сбитнев, Серегин
Текст
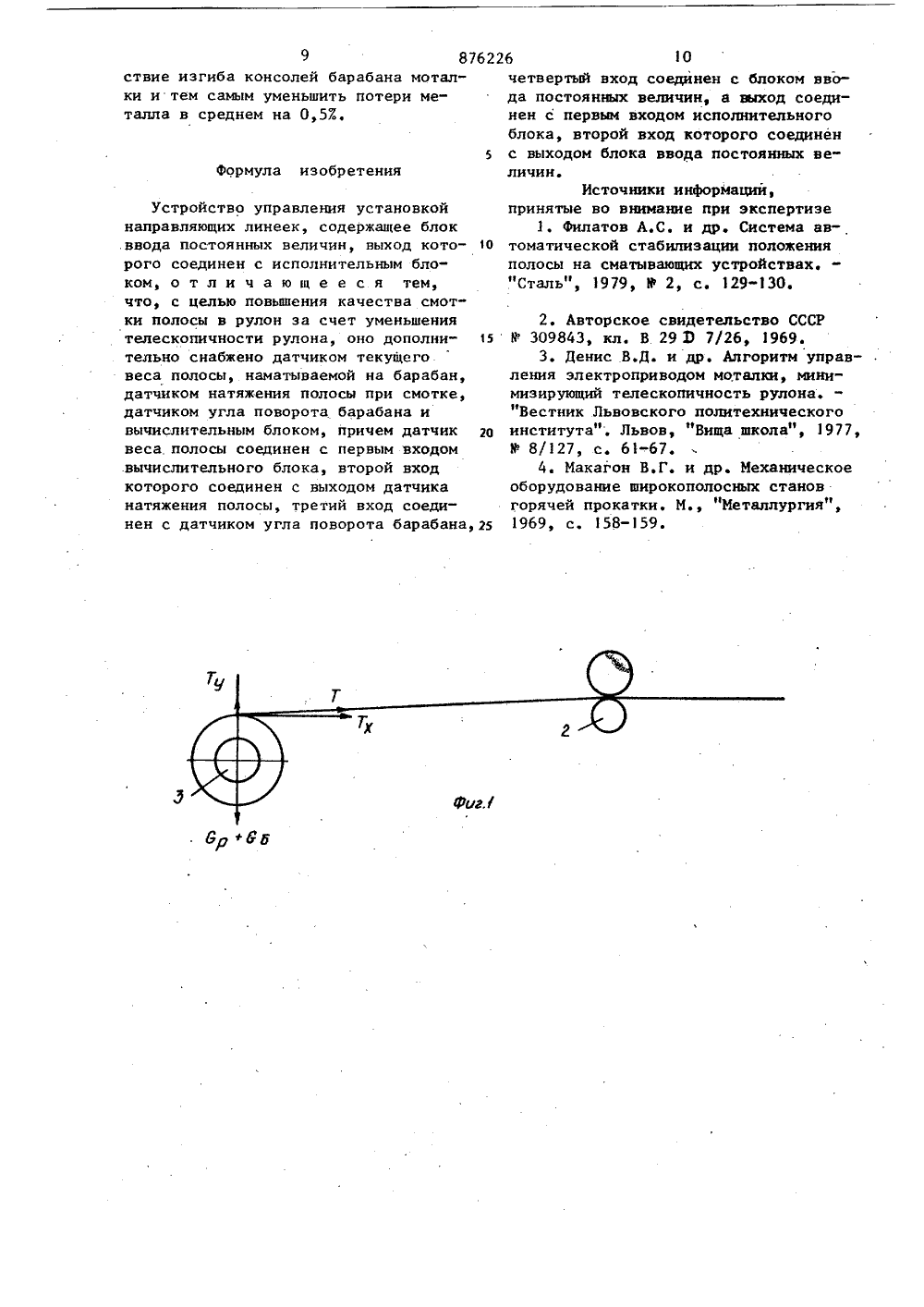
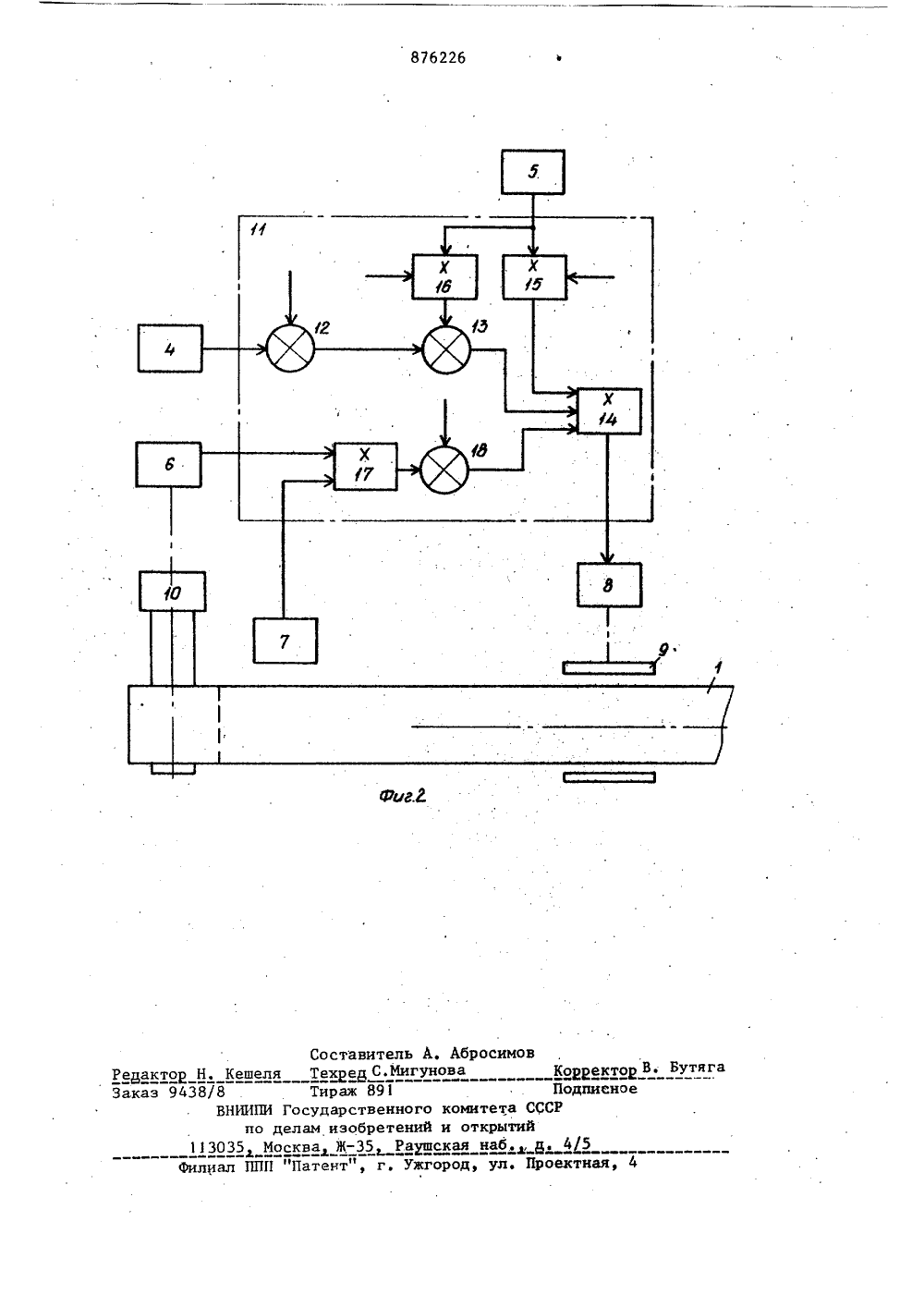
) 2887078/22-02 В 3730 е фУ квй кфинтетСР вф делен взоеретенкй 3)ЩЮ( 6 8. Бюллетеньописания 01.11.8 71 8) ткр ата опубликования А. К В. И. Кириченко, Л. А.И. ф. Серегин и А. И. Сб 2) Авторы изобретен и Киевский институт автоматики им. езда КП(71) Заявнтел 54) УСТРОЙСТВО УПРАВЛЕНИЯ УСТАНОВКОЙ НАПРАВЛЯЮЩИХЛИНЕЕК произв чей, пр равлени неек пр банного е да вра смо Устроиство относится к прокатномуодству, а именно к станам горяокатки, и предназначено для упя установкой направляющих лии входе полосы в моталку баратипа.5Известно устройство управления моталкой с плавающим барабаном, содержаще тчик положения края полосы, вычислительный блок и гидроцилиндр передвижения барабана моталки 11. О1 ОИзвестно устройство для регулирования положения приемного барабана по средней линии наматываемого ленточного материала, содержащее датчики поло 1% жения кромок ленточного материала, исполнительный механизм и вычислительный блок 2.В известных устройствах для предотщения телескопичности рулонов при20тке следят за краем полосы и изменяют положение барабана в соответствии с отклонением края полосы от заданного. Такие устройства не могут быть применены для предотвращения телескопичности на широкополосных станах горячей прокатки, где применяются моталки с неподвижным барабаном. Кроме того, необходимость применения датчика края полосы связана со значитещиыии трудностями, обусловленными тяжелыми условиями работы датчика, высокой температурой, наличием вдрызг воды и масла, вибраций и др.Известно устройство управления электроприводом моталки, минимизирующее телескопичность рулона, в котором величина натяжения смотки полосы изменяется по определенному закону так, чтобы телескопичность рулона была минимальной 3,1.Известное устройство не может устранить естественную телескопичность, связанную с изгибом консольно закрепленного барабана моталки, кроме того, 1 его реализация требует строгого вьптолнения закона изменения величины на50 пряжения, что не всегда возможно поусловиям технологии смотки.Наиболее близким к предлагаемомупо технической сущности и достигаемому результату являются направляющиелинейки, имеющие пневмоцилиндры,электропривод и сельсин, образующиеисполнительный механизм и командоаппарат (блок ввода постоянных величин). Линейки служат. для центрирования полосы относительно оси прокаткипри входе последней в моталку 41.Применение направляющих линеек непредотвращает возникновение телескопичности рулона при смотке, связанной с изгибом консольно закрепленногобарабана моталки. Изгиб барабана возникает при захвате полосы барабаном ивозникновении натяжения полосы междубарабаном и последней прокатной клетью, Кроме того, по мере намотки полосы на барабаны возникает изгиб консоли (барабана под действием значительного веса рулона, вес которого в современных прокатных станах может доходить до 40-6 Ц т. Натяжение смоткии вес барабана обуславливают возникновение изгиба барабана, что приводит кпоявлению телескопичности рулона, величина и знак которой могут изменяться в зависимости от соотношения междунатяжением, весом рулона и взаимнымположением барабана и тянущих роликов,Цель изобретения - повышение качества намотки полосы в рулон за счет35уменьшения телеакопичности рулона,Эта цель достигается тем, что устройство управления установкой направляющих линеек, содержащее блок вводапостоянных величин, выход которогосоединен с исполнительным блоком, 40снабжено датчиком веса полосы, наматываемой.на барабан , датчиком натя- .жения полосы при смотке, датчиком угла поворота барабана и вычислительнымблоком. Причем выход датчика веса полосы соединен с первым входом вычислительного блока, второй вход которого соединен с выходом датчика натяжения, третий вход соединен с датчикомугла поворота барабана, четвертыйвход соединен с блоком ввода постоянных величин, а выход соединен с первым входом исполнительного блока, второй вход которого соединен с выходомблока ввода постоянных величин. 55Вычислительный блок содержит трисумматора и четыре умножителя. Причемвыход первого сумматора, вход которого служит первым входом вычислительного блока, соединен с первым входом второго сумматора, выход которого соединен с первым .входом первого умно- жителя, входы второго и третьего умножителей являются вторым входом вычислительного блока, выход третьего умножителя соединен со вторым входом второго сумматора, а выход второго умножителя - со вторым входом первого умножителя, выход датчика угла поворота барабана соединен с первым входом четвертого умножителя, являющегося третьим входом вычислительного блока, выход четвертого умножителя соединен со входом третьего сумматора, выход которого соединен с третьим входом первого умножителя, выход которого, являющийся выходом вычислительного блока, соединен с первым входом исполнительного блока, второй вход четвертого умножителя одновременно являющийся четвертым входом вычислительного блока, соединен с блоком ввода постоянных величин и вторым входом исполнительного блока.Датчик веса полосы, наматываемой на барабан, служит для определения текущего веса рулона на барабане, Информация, даваемая этим датчиком служит для подсчета величины изгиба барабана, определяемой весом рулона.Датчик натяжения смотки полосы служит для измерения величины натяжения смотки, что позволяет вычислять величину изгиба барабана, вызванную натяжением полосы. Вычислительный блок служит для обработки информации, поступающей от датчиков и вычисления величины уставок линеек по формулам.Введение в устройство указанных датчиков позволяет получить необходимую для расчета пложения линеек информацию, а введение вычислительного блока - производить арифметические операции по заложенным в него формулам, в результате чего исполнительный блок производит смещение линеек в соответст" вующую сторону в плоскости, перпендикулярной оси прокатки. При этом линейки воздействуют на боковые кромки полосы и смещают ее в нужном направлении, уменьшая телескопичность рулона.На фиг. 1 изображена схема приложения сил натяжения и веса к барабану, поясняющая причину возникновения изгиба консолей барабана; на фиг. 2- блок-.схема устройства управления установкой направляющих линеек.5 8762Полоса 1 проходит между двумя тянущими роликами 2 и наматывается на консольно закрепленный барабан 3. Устройство (фиг. 2) содержит датчик 4 текущего веса полосы, наматываемой на барабан 3, датчик 5 натяжения полосы при .смотке, датчик 6 угла поворота барабана, блок 7 ввода постоянных величин, исполнительный блок 8, направляющие линейки 9, электродвигатель 10 1 О и вычислительный блок 11.Причем выход датчика текущего веса полосы соединен с первым входом вычислительного блока 11, второй вход которого соединен с датчиком 5 натя жения полосы, третий вход соединен с блоком 7 ввода постоянных величин, а выход соединен с первым входом исполнительного блока 8.Кроме того, вычислительный блок 11 20 содержит первый сумматор 12, второй сумматор 13, первый умножитель 14, второй умножитель 15, третий умножитель 16 четвертый умножитель 17 и третий сумматор 18, 25Причем выход первого сумматора 2, вход которого служит первым входом вычислительного блока 1, соединен с первым входом первого умножителя 14, входы второго 15 и третьего 16 умножи-з 0 телей являются вторым входом вычислительного блока 11, выход третьего умно. жителя 16 соединен со вторым входом второго сумматора 13, а выход второго умножителя 15 - со вторым входом пер 35 вого умножителя 14, выход датчика 6 угла поворота барабана соединен с первым входом четвертого умножителя 17, являющегося третьим входом вычислительного блока 11, выход четвертого умножителя 17 соединен со входом третьего сумматора 18, выход которого соединен с третьим входом первого умножителя 14, выход которого является выходом вычислительного блока 11, со 4 единен с первым входом исполнительного блока 8, второй вход четвертого умножителя 17, являющийся одновременно четвертым входом блока 11, соединен с блоком 7 ввода постоянных ве 50 личин и вторым входом исполнительного блока 8, Датчик 6 угла поворота барабана связан с барабаном 3 моталки, который приводится во вращение электродвигателем 10. Направляющие линей 55 ки 9 установлены перед входом полосы 1 в моталку. Натяжение смотки Т в общем случае направлено под углом с к горизонтали, что связано с тем,26что, как правило, моталка располагается ниже уровня отводящего рольганга. На ось барабана действует также сила веса барабана 0 и рулона Зр . Принято считать, что вьппеукаэанные силы приложены к концу барабана. Под действием веса барабана и рулона консоль барабана изгибается, вследствие чего при намотке полосы возникает телескопичность отрицательного знака (т.е. направленная в сторону свободного конца барабана) .ртеЬ 1=-6 Е(20 ЬЬНЕГ 9 р те )1 (1)где 3 - длина барабана;Э - момент инерции сечения барабана;Е - модуль упругости материалабарабана;Р - дйаметр барабана;Ь - толщина полосы;И -.число витков полосы на барабане.Вертикальная составляющая силы Т, входящая в.формулу (1), уменьшает отрицательную телескопичность дв, так как направлена вверх (фиг. 1). Под действием натяжения Т возникает положительная телескопичность, определяемая по формулеле т0.= Ь Е; 10+2 пЪ)сОв (1)В формулах (1) и (2) угол с считается неизменным вследствие его малости и незначительного изменения при увеличении диаметра рулона. В необходимых случаях он может быть введен как функция радиуса рулона. Общая телескопичность, вызываемая изгибом консольного барабана моталки, определяется как алгебраическая сумма уравнений (1) и (2)ЛЕ 2 тЬЬ-" (Р+1 пИ) Т(сов-ФМ)-Йб+Яр) (Э)Как видно из формулы 3 , общая телескопичность является функцией числа оборотов барабана (угла поворота), натяжения и веса рулона, причем натяжение и вес рулона создают телескопичность противоположных знаков. В начале намотки, когда вес рулона незначителен, преобладает положительная телескопичность, величина которой под действием возрастающего веса рулона убывает.87622Датчик 4 веса может быть тензорезисторным, магнитострикционным или представлять собой. измеритель длины материала на барабане, имеющий блок для вычисления веса рулона через геометричные размеры полосы и удельный вес. Датчик 5 натяжения полосы может быть магнитострикционным или в виде датчика тока якоря электропривода барабана моталки. Датчик б угла поворо р ,та барабана может быть аналоговым или цифровым в виде импульсатора.Вычислительный блок 11 .представляет собой цифровой автомат, содержащий устройство управления, элементы памяти и арифметические устройства, В качестве вычислительного блока мо" жет быть применен блок типа "Э 1 ектроника".Устройство работает следующим образом.В блок 7 ввода постоянных величин вводят номинальную толщину полосы и требуемую величину раствора линеек 9, определяемую номииалъной шириной полосы, В сумматор 12 вводят величину веса барабана О, во второй умножитель 5 вводят величину произ" ведения6:1 Вхарактеризующую особенности данной моталкие Длину баРабана, модуль упругости К материала барабана, момент инерции 3 сечения ба" рабана. В третий умножитель 16 вводят величину соэ "э 1 пд, в третий сумматор 18 вводят величину Оо, По команде35 оператора исполнительный блок 8 производит установку необходимого раствора линеек 9 и центрует их положение от - носительно оси прокатки. После захвата полосы моталкой срабатывает датчик 4 веса полосы, датчик 5 натяжения полосы и начинается отсчет угла поворота барабана датчиком 6, Сигнал текущего веса рулона поступает с датчика 4 на первый вход вычислительного45 блока 11, т.е. на вход первого сумматора 12, где производится вычисление сумма Об +бр, результат которого поступает на первый вход второго сумматора 13. Сигнал с датчика 5 натяжения пдступает на второй вход вычислительного блока 11, т,е. на входы второго 15 и третьего 16 умножителей. В третьем умножителе 16 происходит вычисление произведения Т (соЫ-з 1 в), результат которого поступает на второй вход второго сумматора 13 с выхода которого вычисленный результат суммы Т (СОМ.-5104 + (Сб-Ср) поступа 6 8ет на первый вход первого сумматора 14, Результат вычисления произведения 6 Т во втором умножителе 15поступает на второй вход первого умножителя 14. Сигнал с датчика 6 углаповорота поступает на третий вход вычислительного блока 11, т.е. на первыйвход четвертого умножитеяя 17, на второй вход которого поступает сигнал овеличине, введенной в блок 7 толщиныполосы. В четвертом умножителе 17происходит вычисление произведения2 иИ, результат которого поступает втретий сумматора 18, результат с выхода которого поступает натретий входпервого умножителя 14, В первом умножителе 14 происходит вычисление выражения (3) по результатам вычисления, поступивших на первый, второй итретий его входы. Результатом вычислейня в первом умножителе 14 является величина смещений (+ДЬ) направляющих линеек 9, необходимого для умень-,шения телескопичности, Сигнал с выхода блока 11 поступает на первый входисполнительного блока 8, который производит смещение направляющих линеекв требуемую сторону в плоскости прокатки на направлении, перпендикулярном оси прокатки. Причем линейки 9перемещаются, сохраняя заданный раст"вор, воздействуя на боковую поверхность полосы 1 и смещая ее в нужномнаправлении. При этом телескопнчностьсматываемого рулона уменьшается.Частота корректировки положениялинеек 9 определяется необходимой точностью регулирования, устойчивостьювыбранной схемы регулирования. Послеокончания смотки линейки возвращаются в исходное положение, определяемоеуставкой оператора, При появлении новой полосы на барабане 3 работа устройства повторяется в том же порядке.Таким образом, введение в устройство управления установкой направляющих линеек датчиков веса, натяженияи угла поворота барабана и вычислительного блока позволяет производитькорректировку положения направляющихлинеек перед моталками в плоскостипрокатки в направлении, перпендикулярном оси прокатки, и тем самым воздействовать на вход полосы в моталку, смещая полосу в направлении, уменьшающем телескопичность рулона,Применение предлагаемого устройства позволяет предотвратить возникновение телескопичности рулона вслед9 8762 стане изгиба консолей барабана моталки и тем самым уменьшить потери металла в среднем на 0,57.Формула изобретенияУстройство управления установкой направляющих линеек, содержащее блок .ввода постоянных величин, выход кото О рого соединен с исполнительным блоком, о т л и ч а ю щ е е с я тем, что, с целью повышения качества смот" ки полосы в рулон за счет уменьшения телескопичности рулона, оно дополни тельно снабжено датчиком текущего веса полосы, наматываемой на барабан, датчиком натяжения полосы при смотке, датчиком угла поворота барабана и вычислительным блоком, причем датчик 20 веса. полосы соединен с первым входом вычислительного блока, второй вход которого соединен с выходом датчика натяжения полосы, третий вход соединен с датчиком угла поворота барабана,25 26 Очетвертый вход соединен с блоком ввода постоянных величин, а выход соединен с первым входом исполнительного блока, второй вход которого соединен с выходом блока ввода постоянных ве" личин.Источники информации, принятые во внимание при экспертизе1. Филатов А.С. и др. Система автоматической стабилизации положения полосы на сматывающих устройствах.- "Сталь", 1979,2, с. 129"130. 2. Авторское свидетельство СССР309843, кл. В 29 2 7/26, 1969.3. Денис В.Д. и др. Алгоритм управления электроприводом моталки, минимизирующий телескопичность рулона. - "Вестник Львовского политехнического института". Львов, "Вища школа", 1977,8/127, с. 61-67.4. Макагон В.Г. и др. Механическое оборудование широкополосных станов горячей прокатки. М., "Металлургия", 1969, с. 158-59.Составитель А, АбросимоКешеля Техоел С. Мигунова Вутяга Релак Зак е митета открытиая наб,4/5 11303 т", г. Ужгород, ул. Проектная,л 8/8 Ти ВНИИПИ Госуд по делам 5 Москвааж 891ственногообретений35 Раушс Коврек Подпис ССР
СмотретьЗаявка
2887078, 27.02.1980
КИЕВСКИЙ ИНСТИТУТ АВТОМАТИКИ ИМ. ХХУ СЪЕЗДА КПСС
КУЗИН ВАСИЛИЙ АЛЕКСАНДРОВИЧ, КИРИЧЕНКО ВЛАДИМИР ИВАНОВИЧ, ОРУЖИНСКИЙ ЛЕОНИД АРСЕНЬЕВИЧ, СЕРЕГИН ИГОРЬ ФЕДОРОВИЧ, СБИТНЕВ АНАТОЛИЙ ИВАНОВИЧ
МПК / Метки
МПК: B21B 37/00
Метки: линеек, направляющих, установкой
Опубликовано: 30.10.1981
Код ссылки
<a href="https://patents.su/6-876226-ustrojjstvo-dlya-upravleniya-ustanovkojj-napravlyayushhikh-lineek.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления установкой направляющих линеек</a>
Устройство для измерения амплитудно-частотных характеристик

Номер патента: 1053018
Опубликовано: 07.11.1983
МПК: G01R 27/28
Метки: амплитудно-частотных, характеристик
...как АЧХ объекта измеренийопределяются вычислением отношенияамплитуды выходного напряжения объекта к амплитуде его входного напряжения, то нестабильность амплитуды колебаний, генерируемых синтезатором 1 частот, не влияет на точностьизмерений. Однако коэффициенты передачи линейных детекторов 10 и б обоих измерителей 9 и 5 амплитуды за-0висят от частоты, что ухудшает точность при измерениях в широком диапазоне частот, Для устранения этогоявления в состав обоих измерителей9 и 5 амплитуды, построенных по одинаковым схемам, включены управляемыеделители 11 и 7 и функциональныепреобразователи 12 и 8. В измерителе 9 амплитуды выходное напряжениелинейного детектора 10 умножаетсяс помощью управляемого делителя 11на коэффициент, величина...
Устройство для обучения “ока

Номер патента: 451110
Опубликовано: 25.11.1974
Автор: Казьмин
МПК: G08B 7/02
...ячеек памяти, каждая из которых своим входом подключена к программному блоку, а выходы пх соединены с блоком сравнения 5. Блок памяти 4 реализует запись и хранение информации в ячейках памяти.Блок сравнения 5 выполнен в виде контактной илп дподно-транзисторной схемы совпадения с двумя многоканальными входамп н одним выходом. Один многоканальный вход блока сравнения 5 подключен к ячейкам блока памяти 4, а другой - к блоку 6 правильных ответов, выход блока сравнения 5 соединен с олоком индикации 7 и служит для сравнения состояния блока памяти 4 и блока 6 правильных ответов.Блок правильных ответов 6 представляет собой контактное поле, выходы которого сое45110 Составитель Л. Сысоева Техред О, Гуменюк Корректор Н. Аук Редактор Е. Гончар...
Устройство для контроля и учета времени простоя оборудования

Номер патента: 517033
Опубликовано: 05.06.1976
Автор: Хаиндрава
МПК: G07C 3/10
Метки: времени, оборудования, простоя, учета
...под действием которого (которых) импульсы с генератора импульсов 1 З 5через первый коммутатор 3 начинают поступать на вход соответствующего счетчика 8.Подача импульсов с генератора импульсов 1 на счетчики 8 прекращается с приходом через соответствующую клемму 5импульса "пуска" оборудования на первыйкоммутатор 3.Одновременно с приходом импульсов ""остановки" через клемму 6 к первому ком мутатору 3 поступает код причины остановки оборудования. а с выхода первого коммутатора 3 код причины записывается всоответствующий счетчик 8.В каждый раз с приходом импульсов"остановки" и "пуска" оборудования на выходе первого коммутатора 3 образуетсяимпульс, под действием которого на блоке7 фиксируются (запоминаются) моментытекущего времени (секунды,...
Устройство для дифференциальной защиты многообмоточного трансформатора

Номер патента: 647791
Опубликовано: 15.02.1979
Авторы: Ванин, Майоров, Уляницкий
МПК: H02H 3/28
Метки: дифференциальной, защиты, многообмоточного, трансформатора
...4 имеет выход переменного сигнала 8, выход отрицательных полуволн 9 и выход положительных полу- волн О.Выход переменного сигна,ча 8 соединен с входами фильтра первой гармоники 11 и фильтра второй гармоники 12 рабочего сигнала, Выходы фильтров включены на формирователи модулей 13. Выходы этих формирователей модуля соединены с двумя вхо.дами второго блока сравнения (компаратор) 14, на третьем входе задается уставка устройства защиты четвертый вход компаратора 14 соединен с выходом блока для компенсации токов небалзнса:7,Выход отрицательных полуволн 9 формирователя рабочего сигнала 4 соединен с входом формирователя тормозного сигнала 5, Выход положительных полуволн 10 с вхсдсл блока для ксмценсации голц ц баланса 7. Выходы последнего...
Счетчик с предварительной установкой

Номер патента: 664301
Опубликовано: 25.05.1979
Авторы: Балаболин, Белоусов, Дронов
МПК: H03K 23/00
Метки: предварительной, счетчик, установкой
...деления одного счетного разряда устройства,Счетные разряды 1, 2, 3 и генератор б констант опрашиваются последо"вательностью импульсов, поступающихпо,шине 16,Таким образом, частота опроса счетных разрядов на. порядок выше частоты .30 счета.Генератор б констант Формирует сигналы на и управляющих выходах, одиниз которых, в зависимости от выбранного числа задающим блоком, с инфор-35 Мациоивого выхода задающего блокапоступает иа второй вход схемы 141 сравнения. кодов, на первый вход которой поступает сигнал с выхода элемента ИЛИ 13. На вход последнего пос 40 тупает сигнал с выхода одного иэ счет-.,ных разрядов 1, 2, 3 через элемент И10, 11, 12 соответственно, которыйвыбирается задающим блоком 7, опреде,дяющим порядок выбранного...
Предыдущий патент: Устройство для измерения положения механизма
Следующий патент: Устройство для регулирования подачи технологической смазки на прокатные валки
Случайный патент: Стабилизатор расхода