Электроинтегратор для решения градиентных задач
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
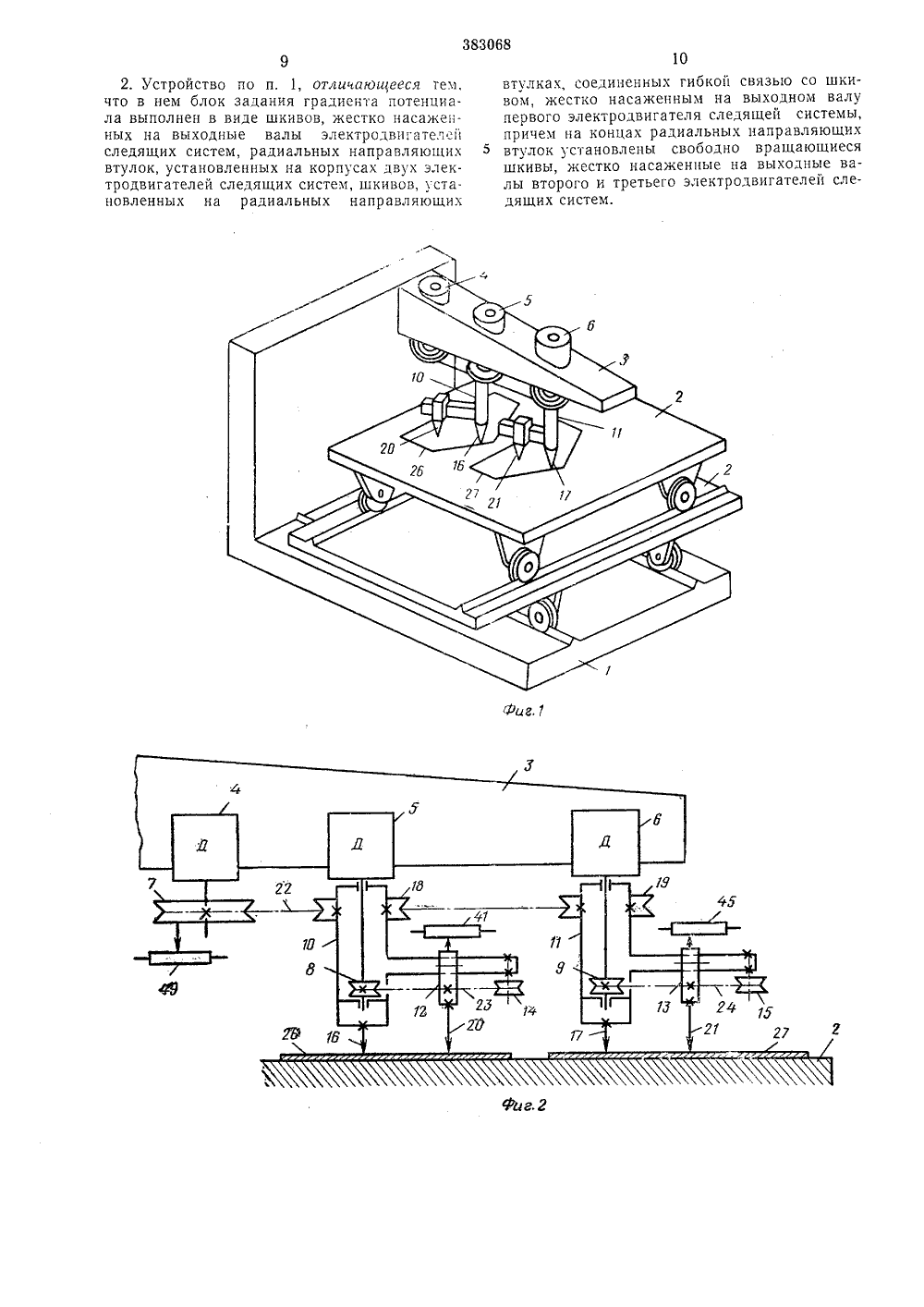
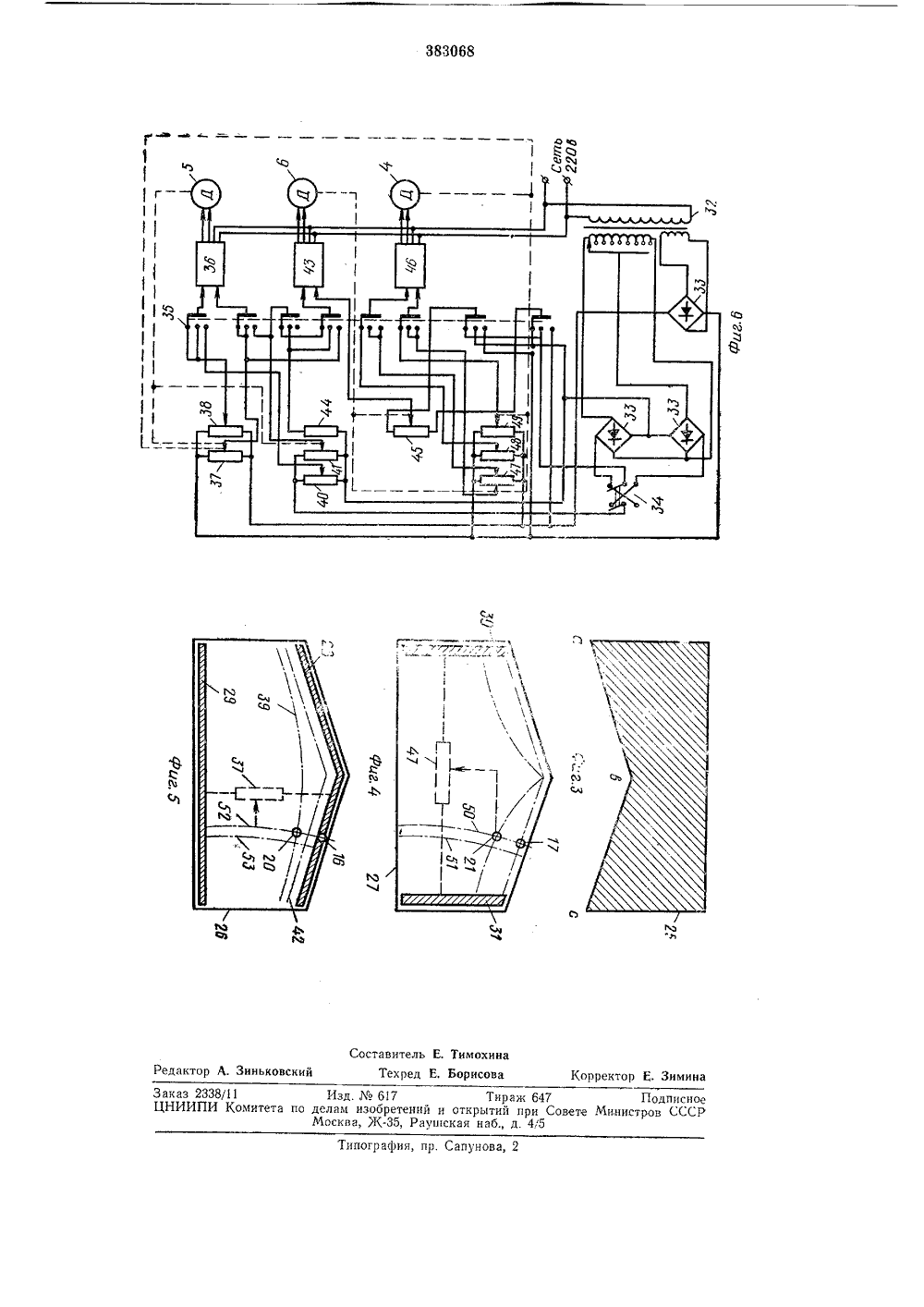
383068 О П ИИЗОБРЕТЕНИЯ Союз Советския Социалистическия Республик. свидетельства Ае авпсимое о М, Кл. Ст Обя 7/44 Заявлено 22.71,1970 (Ме 1450882с присоединением заявки М 1 риоритет Комитет по делам изобретений и открытий при Совете Министров СССР.т.1973. Бюллетень М 2 Опубликован Л 1 П.19 ата опубликования описания Авторыизобретения. ф. Агеев, В, П, Ашихмин, А, В. Бородин и В. Б, Лапш аявитель ЗЛЕКТРОИНТЕГРАТОР ДЛЯ РЕШЕНИЯ ГРАДИЕНТНЫХ ЗАДАЧагаемом модостигается цих систем Изобретение относится к электромоделированию, а именно к электрохимической размерной обработке металлов и сплавов и предназначено для моделирования на электропроводной бумаге различных градиентных задач.Известны электроинтеграторы градиентных задач, при помощи которых исследуют процесс формообразования поверхности при электрохимической размерной обработке. Известно также аналогичное моделирующее устрой ство, приставка к которому позволяет наблюдать на экране осциллоскопа не только распределение потенциалов, но и распределение градиента его вдоль заданной линии тока, что используется при решении задач гидроди намики.Однако при работе с известным электропнтегратором градиентных задач условие того, что направление градиента потенциала перпендикулярно границе, приводит при сложной 20 геометрии граничных условий, наносимых сплавом Вуда, к следуощему.1. Приходится разбивать исследуемую ооласть на большое количество шагов, гак как линия тока перпендикулярна границе чаще 25 всего на малом участке, что увеличивает время решения задачи.2. Ручное ведение блока выдачи градиента не обеспечивает необходимой точности решения задачи. ЗО 3. Отсутствие прямой обратной связи с устройства, отрабатывающего величину градиента потенциала, приводит к погрешности из-за инерционности привода.4. При работе моделирующего устройства с приставкой необходимо осуществить предварительное нанесение на модель эквипотенциалей линий тока и затем выполнить ручную установку электродов на линию тока через равные промежутки, что увеличивает время решения задачи.5. Схема достаточно сложна, что ведет к накапливанию погрешностей; она не применима при рассмотрении распределения градиентов потенциала вдоль границы моделируемойобласти,Целью изобретения является создание моделирующего устройства для решения градиентных задач на электропроводной бумаге, которое позволяет получить линии поля (эквипотенцпа.пи и линии тока) и автоматически снимать величину градиента потенциала в приграничных слоях с графической выдачей результата при моделировании различных градиентных задач, в частности при исследовании процесса электрохимической размерной обработки металлов и сплавов,Согласно изобретению, в предлделируюшем устройстве эта цельиспользованием в нем трех с.педя3две из которых работают по принципу урав.новешивания мостовых схем, а третья -ца сигнале рассогласования, возникающем между соседними эквипотенциалями дополнительной модели.11 ервая следящая система задает величину градиента потенциала за счет сигнала между границеи моделируемои ооласти и экьипотецциалью, которыи на функциональном олоке дает линеиную величину зазора, преобразовывающуюся в обратную функцию, т. е. градиент потенциала задается переменным зазором и постоянной разностью потенциалов. Функциональное устройство аппроксимирует ооратную функцию.вторая следящая система отрабатывает величину градиента потенциала, сравнивая сигнал с функционального блока в виде функции, обратнои зазору, с сигналом линеиного потенциометра отработки, Съем величины градиента потенциала в предлагаемом моделирующем устройстве производится по линии тока, для вывода на которую имеется третья следящая система, раоотающая на сигнале рассогласования между двумя близлежащими эквипотенци алями дополнительной модели, которые являются линиями тока первой модели. механизм вывода на линию тока, задания и отработки величины градиента потенциала имеет вращательное движение с возвратно-поступательным прямолинейным движением щупов по направляющим, а для ведения неподвижных щупов по границе - возвратно-поступательное взаимно перпендикулярное дви- жение столов. Для фиксации результатов моделирования под дополнительную модель подложена копировальная бумага, и результат, таким образом, автоматически выдается в виде графика на обычной бумаге.Изобретение поясняется чертежами.На фиг. 1 приведен внешний вид (в изометрической проекции) моделирующего устройства для решения градиентных задач; на фиг, 2 - кинематическая схема механизма вывода на линию тока задания и отработки градиента потенциала; на фиг. 3 - контур детали после электрохимической размерной обработки; на фиг. 4 - дополнительная модель для решения градиентных задач; на фиг. 5 - основная модель для решения градиентных задач; на фиг. 6 - функциональная электрическая схема моделирующего устройства для решения градиентных задач. Моделирующее устройство для решения градиентных задач (см. фиг, 1) состоит из основания 1, на котором расположены электронный блок (не показан), нижний и верхний столы 2, имеющие возможность взаимного перпендикулярного перемещения, и жестко закрепленная на основании 1 над верхним столом 2 траверса 3, на которой, в свою очередь, смонтирован механизм задания и отработки величины градиента потенциала и вывода подвижных щупов на основной и дополцитель 383068 цых моделях ца направление вектора градиента потенциала.1Этот механизм включает в себя (сч. ф и 2) приводы электродвигателей 4, 5, б, на5 выходных валах которых жестко насажены,соответствецно, шкивы 7, 8 и 9. Втулки 10 и 11 установлены на корпусах электродвигателей 5 и 6 с возможностью свободного поворота.10 В тулки 10 и 1( имеют радиальные направляющие, по которым могут перемещаться расположенные на них ползуцы 12 и И, Кроме того, на концах радиальных направляющих 15втулок 10 и П смонтированы свободно вращающиеся шкивы 14 и 15, а также ца оси вращения вышеуказанных втулок жестко закреплены щупы 16 и 17 и шкивы 18 и 19 соответственно.На ползунах 12 и 13 установлены щупы 20 20 и 21и 21, которые могут перемещаться вместес ними. Шкивы 7, 18 и 19, имеют одинаковый диаметр и соединены шнуром 22 для возможности синхронного поворота втулок 10 и 11 с радиальными направляющими под действием 25 электродвигателя 4. Шкивы 8 и 14 так же,как и шкивы 9 и 15, соединены соответственно )цнурами 23 и 24, которые, в свою очередь, закреплены ца ползуцах 12 и И для передачи им поступательного движения от вращающих ся под действием электродвигателей 5 и 6шкивов 8 и 9, Исходя из контура а - 6 - с детали 25 (см. фиг. 3), оерутся основная модель 26 (см, фиг. 5) и дополнительная - 27 (см.фиг. 4), на которых сплавом Вуда наносят 3 выступы 28, 29, 30 и 31, задающие граничные 35условия, соответствующие моделируемой области, Вышеуказанные модели 26 и 27 закреплены зажимами (не показаны) на поверхности верхнего стола (см. фиг. 1) таким обра зом, чтобы при перемещении нижнего и верхнего столов 2 щупы 16 и 17 (см. фиг. 2) про.ходили одноименные точки основной и дополнительной моделей.Функциональная электрическая схема мо дулирующего устройства (см. фиг. 6) содержит масштабный трансформатор 32, на выходах которого подключены напряжения, переключатель 35 рода работ и три следящих системы.50 Первая следящая система, предназначеннаядля задания величины градиента потенциала, состоит из усилителя 36 с каскадом сравнения на входе, электродвигателя 5 и измерительной части, в которую входят переменные 55 резисторы 37 и 38.Переменный резистор 37, обозначенный нафиг. 5 пунктиром, имеет сопротивление электропроводцой бумаги основной модели 26, а подвижным контактом его является переме щающийся по модели 26 (см. фиг. 2) подвижный щуп 20.Переменный резистор 38 (см. фиг, 6) является задающим для эквипотенциали, например 39 (см. фиг. 5), основной модели 26. В 65 зависимости от положения переключателя ро зазо 685да работ 35 (см, фиг. 6) измерительная часть вышеупомянутой следящей системы вклОчаст в себя переменные резисторы 40 и 41, при:,. резистор 40 является задающим потенцца, .тром эквидистаТы, например 42 (см. фиг. 5), на основной модели 26, в резистор 41 (см. фиг. 5) представляет собой потецциометр (: показан), жестко закрепленный ца ралцальной направляющей втулки 10 (см. фиг. 2), подвижный контакт которого жестко связа:1 с ползуном 12.Вторая слепяцая система отработки величины градиента потенциала состоит из си.:ителя 43 (см. фиг, 6), электродвигателя 6 и з - мерительной части, которая включает ь ссб. переменный резистор 41, между полник:ь", контактом и одним из концов которо.а м: жет подключаться резистор 44 и переменцьп, резистор 45, явля 0 цийся потсцциаметрам, жсст(0 закрепленным (це показан) на рали:лл:10 Й направляющей втулки П (см. фиг, 2) п Ичный контакт которого, в свою очере;ь, жестка сВязан с пОлзунам 13. В зависимости положения переключателя рола работ 35 (см. фиг, 6) измерительная часть лан 1:,.; следящей системы может предстаглять собой мост, состояций из переменных резисторов 15 и 37.Третья следящая система - система вьно- да подвижных щупов ца направление вектора градиента потенциала - состоит:з усилителя 46 (см, фиг, 6), электролвигателя 4 и измерительной части, в которую в загисимасти от положения переключателя рола работ 35 входят либо резистор 47, либо резисторы 48 и 49.Переменный резистор 47 (см. фиг. 4) я: - ляется резистором (изображен Г 1 уцкт 11 м) лополнительной мапсли 27, а палвижцые контакты его - это щупы 17 и 21, цахоля циеся на соседних эквипотеццлалях 50 и 51 указанной модели, Данные эквипотенциала соответствуют линиям тока 52 и 53 на основной модели 26 (см. фиг. 5), так как геометричскан форма токопроволящих выступов 30 и 31, задающих граничные условия пополнитегь 1101 модели 27, является такой же, что и у цепровоцящих (линии среза) граничных условий основной модели 26, и наоборот.Переменный резистор 48 служит лля руч 10- го задания величины синхронного поьоротя втулок 10 и 11 с радиальными направляющими (см. фиг. 2), т, е. и щупов 20 и 21, а персменный резистор 49 - лля отработки Величины заданного синхронного поворота; оц яв- ЛЯЕТСЯ КОЛЬЦЕВЫМ И РЯСПОЛОЖЕ 1 НЯЛ ШКИВОХ 1 7, причем полвижный контакт его жестко закреплен ца ланном шкиве.Предлагаемое устройство в зависимости от положения переключагеля рода работ 35 (см. фиг. 6) может работать в одном из трех возможных режимов. При работе устройства в любом режиме необходимо персмецать верхний и нижний столы 2 (см. фиг. 1) с обязательным условием, чтобы неполвижный цуп 5 10 15 20 25 ЗО 35 40 45 50 55 60 65 16 находился постояцно на указанной анолной границе 28 (см. фиг. 5) основной модели 26, а неподвижный щуп 17 (см. фиг. 4) цахалился ца соответствующей границе лсц(ал:и- тельной молелц 27.В перва. режиме (переключатель 1 олд раОот 35 цахалится в палажеци 1, показанном на фиг. 4) строцство позволяет находить картину электрического поля в моделируемой области. Для этого сначала фиксируется положение втулок 10 и 11 с ралцальцыми направляющими (см. (риг. 2) церпецликулярцо границе 29 (см. фцг. 5) основной молели 26 при помощи третьей следящей системы, которая в этом режиме работает спелуюцю образом.На входной каскад сравецця усилителя 46 (см. фиг. 6) поступает сигнал, залаваемый с патенциометра ручного поворота 48. Оц сравИВЯСТСЯ С СЦГЦ 11 ЛОМ С КОЛЬЦЕВОГО ПЕРЕХ 1 ЕЦ- ного резистора 49 отработки поворота. Усиленный разцостный сигнал поступает ца ЛвнГатель 4, который производит поворот ерез передачу ш:уром 22 (см. фиг. 2) между шкивами 7, 18 ц 19 втулок 10 и 11 с ралцаль:ыми направля 10 цимц ло тех пор, пока сигнал, снимаемый с .10 лвиж 10 ГО жестко закрсплецно 0 ца шкиве 7 контакта переменного резистора 49 не срявяется с сигналом, заланць:и ня переменном резисторе 48 ручного ловорота.Затем ца усилитель 36 пергой слеляцей системы подастся сиг;ял с задающего переменного резистора 38 эквцпотсцциали (см. фиг. 6) который сравнивается с сипдлом, снимаемым чсрсз Г 1 уп 20 (см, фиг. 2) с основной модели 26 (ца фиг. 6 это персмс:цый резистор 37). Усилен;ЫЙ разцостны сигнал поступает ца электродвигатель 5 (см. фиг. 6 и 2) который через передачу 23 меж; шкивами 8 н 14 выводит полвцжцый шуп 20, закрепле;цый ца ползунс 12, на эквипотсцциаль, заланцую ца потецциометре 38 (см. фи:. 6).В это жс время ця усилитель 43 второй слс- ляшеЙ сцстеь ГОст пяют сиГця, ы с перезе 1- ного рсзцстора 5 и с переменного резистора 41, который пропорционален расстоянию межлу границей 28 (см. фиг. 5) ца основной м 1- лели 26 и залац:ой эквнпотсцццалью 39, так как подвижный контакт его жестко связан с ползуцом 12 (с. фпг. 2). Усиленный рдзностныц сигнал прц помощи электродвигателя 4 (см. фиг, 6) прцволит в лвцжецце через перслачу 24 межлу шкивами 9 и 15 ползуц 13, несциЙ па;1 вижцъЙ контакт персмснца 0 резистора 45, ло тех пор, пока лаццый палвижный контакт, а также полвцжцый цуп 21 це отложит на переменном резисторе 45, а также на дополнитеьцой модели 27, то же расстояние, которое имеется ца переменном резисторе 41, а также ця основно 1 молелц. Таким образом ца лополцительной молелц 27 отклалывается линия така осцоьн ой молели 26.Во втором режиме (переклочатель рола работ 35 цахолится в срелцем положени) устройство пазгаляст ; .лягать величину градиента потенциала через расстояние межл7ацодной границей моделируемой области, например угловой поверхностью 28 (см. фиг. 5) и эквипотенциалью 39, измеряемое по линии тока 52. Первая следящая система находит эквипотенциаль 39 (см. фиг. 5) точно так же, как и в первом режиме, так как измерительная часть ее состоит из того же моста, составленного из переменных резисторов 37 и 38 (см. фиг. 6). В то ке время на усилитель 46 третьей следящей системы поступает сигнал, снимаемый неподвижным щупом 17 (см. фиг. 4) с эквипотецциали 50 дополнительной модели 27 (см. фиг, 4; ца ней это - переменный резистор 47), и сигнал, снимаемый подвижным щупом 21 с одной из соседних эквипотенциалей, например 51 (на фиг. 4 это тоже переменный резистор 47). Усиленный разностный сигнал поступает на электродвигатель 4, который через передачу 22 (см, фиг.2) между шкивами 7, 18 и 19 производит поворот втулок 10 и 11 с радиальными направляющими до тех пор, пока подвижный щуп 21, закрепленный на ползуне 13, не окакется на той же эквипотенциали дополнительной модели, что и щуп 17, т. е. на эквипотецциали 50 (см, фиг. 4), а подвижный щуп 20, закрепленный на ползуне 12 (см. фиг. 2) не окажется на той же линии тока 52 (см. фиг. 5) основной модели 26, что и щуп 16 (см. фиг, 2).Имея направления вектора градиента потенциала от точки 20 к точке 16 (см. фиг. 5) на основной модели 26 и от точки 21 к точке 17 (см. фиг. 4) на дополнительной модели 27, измеряют расстояние от точки 16 (см. фиг. 5) анодной границы 28 до точки 20 выбранной эквипотенциали 39 при помощи переменного резистора 41 (см. фиг. 2 и 6). Электрический сигнал, снимаемый с подвижного контакта переменного резистора 41, являющийся величиной, ооратно пропорциональной измеряемому расстоянию, благодаря включению резистора 44, задает величину градиента потенциала и поступает на усилитель 43 второй следящей системы. В то же время на усилитель 43 приходит сигнал с переменного резистора 45 отработки величины градиента потенциала. Усиленный разцостный сигнал поступает на электродвигатель 6, который через передачу 24 (см, фиг. 2) между шкивами 9 и 15 перемещает ползун 13 со щупом 21 до тех пор, пока сигнал, снимаемый с подвижного контакта жестко закрепленного на ползуне 13 переменного резистора 45, не сравняется ца входе усилителя 43 (см, фиг. 6) с сигналом, поступающим от переменного резистора 41. В этом случае подвикный щуп 21 на дополнительной модели 27 (см. фиг, 4) отложит величину градиента потенциала от точки 21 до точки 17.В третьем режиме (переключатель рода работ 35) (см. фиг. 6) находится в никнем положении) устройство позволяет задавать всличину градиента потенциала через напряжение, снимаемое между соответствующими точками анодной границы 28 (см, фиг. 5) и 383068 эквидистапты 42, лежащими на одной и той же линии тока, например 52.В этом случае на усилитель 36 (см, фиг. 6)первой следящей системы поступают сигналы,5 снимаемые с задающе:о переменного резистора 40 эквидистацты, и переменного резистора 41.Усиленный разностцый сигнал поступает цаэлектродвигатель 5, который через передачу 10 23 (см. фиг, 2) между шкивами 8 и 14 выводит подвижный щуп 20, закрепленный так же, как и подвижныи контакт переменного резистора 41 на ползуне 12, на эквидистацту 42 (см, фиг, 5), т. е, при обходе гранины 28 за зор между щупами 16 и 20 (см. фиг. 2) поддерживается постоянным и величина его задается установкой переменного резистора 10 (см. фиг. 6).Выход подвижных щупов 20 и 21 (см. фиг.4 и 5) на линию тока основной 26 и дополнительной 27 моделей производится третьей следящей системой точно так же, как и во втором режиме, так как измерительная часгь ее остается без изменения, На усилитель 43 (см.25 фиг, 6) второй следящей системы поступаетсигнал, снимаемый подвижным щупом 20 (см, фиг, 2) с соответствующей точки эквидистанты 42 (см. фиг, 5) в основной модели 26 (ца фиг. 6 переменный резистор 37), и сигнал, З 0 снимаемый с переменного резистора 45 отработки величины градиента потенциала. Усиленный разностный сигнал управляет электродвигателем б, который через передачу 24 (см.фиг. 2) между шкивами 9 и 15 перемещаег З 5 ползуп 13 со щупом 21 до тех пор, пока сигнал, снимаемый с подвижного контакта, жестко закрепленного ца ползуне 13 переменного резистора 45, не сравняется на входе усилителя 43 (см. фиг. 6) с сигналом, снимаемым 40 с соответствующей точки эквидистацты 42(см. фиг, 5) основной модели 26.Результат во всех режимах фиксируется через копировальную бумагу, положенную под дополнительную модель 27.45Предмет изобретения1, Электроинтегратор для решения градиентных задач, содержащий трансформатор, переключатель, модель из электропроводяще го материала с установленными на ней подвижными щупами и измерительные схемы, отличающийся тем, чо, с целью расширения класса решаемых задач, оцо содержит дополнительную модель из электропроводящего ма териала, траверсу, три следящие системы,соединенные через переключатель с соответствующей измерительной схемой, каждая из которых выполнена в виде электродвигателя, укрепленного па траверсе, ко входу которого 60 подключен усилитель, соединенный с первичной обмоткой трансформатора, и блок задания градиента, соединенный с электродвигателями следящих систем потенциала, и основной и дополнительной моделями из электро проводящего материала.383068 10 92. Устройство по п. 1, отличающееся гем, что в нем блок задания градиента потенциала выполнен в виде шкивов, жестко насаженных на выходные валы электродвигателей следящих систем, радиальных направляющих втулок, установленных на корпусах двух электродвигателей следящих систем, шкивов, установленных на радиальных направляющих втулках, соединенных гибкой связью со шкивом, жестко насаженным на выходном валу первого электродвигателя следящей системы, причем на концах радиальных направляющих 5 втулок установлены свободно вращающиесяшкивы, жестко насаженные на выходные валы второго и третьего электродвигателей следящих систем.383 О 68 г;в оь см Составитель Е. Тимохина едактор А. Зиньковский Техред Е, Борисова Корректор Е. Зимина
СмотретьЗаявка
1450882
А. Ф. Агеев, В. П. Ашихмин, А. В. БородинВ. Б. Лапшин
МПК / Метки
МПК: G06G 7/44
Метки: градиентных, задач, решения, электроинтегратор
Опубликовано: 01.01.1973
Код ссылки
<a href="https://patents.su/6-383068-ehlektrointegrator-dlya-resheniya-gradientnykh-zadach.html" target="_blank" rel="follow" title="База патентов СССР">Электроинтегратор для решения градиентных задач</a>
Устройство для зимерения основной частоты в цепях переменного тока

Номер патента: 566194
Опубликовано: 25.07.1977
Авторы: Масандилов, Рожанковский
МПК: G01R 23/00
Метки: зимерения, основной, переменного, цепях, частоты
...Б(и(сд Ч)+5, 6 и(2 а 1ф ) щи(ф"ф и 1 ег " щи)с 052 (2 ы 1и -и 2 (сдг ф 9,)+ Зисо 81(1 Ы 1+ Ц де К - коэффс,Д+ ициент 1 пропорциональости ф Яляющих, амп гармонических состав- каждой из которой опрениями амплитуд двух частоты - суммой или этих гармоник.жение на выходе фильтт, поступающее на перделения, имеет вид мм тудь ляются произвед ных гармони разностПри раЗн вый вх ью том алряастоа 5 них блгде К - Выходноевход которог нная величина,ение интеграторатся ток ( см, фор погде К - постоянная велеВ этом случае напряже квадратора 9 на,на выходе. г о г 1 1 ю 1l г юг ц= и= -- у 9 9 8 Яг 2 (, ю( 2 г г юг ф.1 и,со 82(Ы 1 фР,)+ со 51Иф Юг)+" + ля ких щих, аналогичнаяК К постоянныеде фильтра 4 нижнихимеет вид еличины, а на вых астот напряжение...
Устройство для измерения основной частоты в цепях переменного тока

Номер патента: 682839
Опубликовано: 30.08.1979
Авторы: Масандилов, Рожанковский
МПК: G01R 23/00
Метки: основной, переменного, цепях, частоты
...исследуемая трехфазная цепь соединена в звезду с изолированной нулевой точкой, отсутствуют гармоники тока с номерами кратными трем, а также все четные гармоники. Например токи фаз а, Ь и с следующие:+ 1,ып(7 м 1 + ср, + 120 ) +, 682839где Ко - постоянный коэффициент.В этом случае напряжения на выходе квадраторов 6, 8 и 10 пропорциональны квадратам напряжений У,2, 015 и 018 соответст 5 венно, а выходное напряжение сумматора15 следующее:12 1210 =К; 1,+ + - + +0(5)(4) 55 где 1 т - действующее значение;ж - круговая частота;р - сдвиг фаз.Причем эти токи связаны известными соотношениями (где 1 - время).ь - о ь И Ее Ссс ь+Напряжения на выходе квадраторов 5, 7 и 9 пропорциональны квадратам соответствующих фазных токов, а напряжение...
Устройство для измерения основной частоты в цепи переменного тока

Номер патента: 708252
Опубликовано: 05.01.1980
Автор: Масандилов
МПК: G01R 23/00
Метки: основной, переменного, цепи, частоты
...введен интегратор,между выходом датчика тока и входом усилителя-преобразователя.На чертеже приведена блок-схема уройства,5Устройство для измерения основнойчастоты в цепи переменного тока содержит последовательно соединенные датчик 1 тока исследуемой цепи, интегратор 2 и двухканальный усилитель-преобразователь 3. Выходы первого и второю каналов этого усилителя подключены ко входам фильтров нижних частот 4 и 5 соответственно. Выходы фильтров 4 и 5 соединены со входами блока 6 деления, а выход последнего - со входом блока 7 извлечения квадратного корни. Вход блока 7 является выходом всего устройства.Первый канал усилителя-преобразователя 3 содержит квадратор 8, а второй канал - последовательно соединенные интегратор 9 и квадратор...
Анализирующее устройство для электрогравировальных автоматов

Номер патента: 885058
Опубликовано: 30.11.1981
Автор: Шолов
МПК: B41C 1/04
Метки: автоматов, анализирующее, электрогравировальных
...Резистор 16 предназначен для балансировки ОУ при отсутствии входных сигналов. Резисторы 1114 служат лля согласования элементов схемы, Резистор 19 является нагрузочным, Диод 20 устраняет возможность вылачи выхолного сигнала вовнешние цепи обратной полярности при не-точной установке скользянгих контактов переменных резисторов 9 и 1 О.В режиме Негатив анализатор работает следующим образом,Переключатель 8 устанавливается в по.ложение Негатив. Отрицательная полярность фото-ЭДС с фотодиода 7 .через переключатель 8 и добавочный резистор 2 подается на неинвертирующий вхол ОУ, по.этому с его выхода выдается сигнал отрицательной полярности, меняющийся линей.но по величине в зависимости от плотностисчитываемого оригинала (фиг, 2). При этомболее...
Модель для исследования систем с распределенными параметрами
Номер патента: 445048
Опубликовано: 30.09.1974
Автор: Прокофьев
МПК: G06G 7/48
Метки: исследования, модель, параметрами, распределенными, систем
...за процессом решения,а также ручного замера получаемыхрезультатов модель содержит индикатор 10 нестационарного режима.Основной особенностью моделисетки 1 является то, что в нейфункции узловых резйсторов выполниют МОП-транзисторы, работающие включевом режице и для этого управляецые по затвору широтно-импульсным модулированным сигналоц 0",вцрабатцваеццм устройствоц 2.Сетка состоит из трехкоординатных элементов, в каждый из которыхвходит по два МОП-транзистора П,истоки которых соединены междусобой, образуя узловую точку модели-сетки. Между узловой точкой инулевыц потенциалом включен узловой конденсатор 12,Управление параметрами Моделиосуществляется по завору выходнымсигналоц устрсйствз 2, каждый эле 111 ент которого сц, фиг, 2)...
Предыдущий патент: Устройство для моделирования потенциальных
Следующий патент: Устройство для моделирования процесса появления отказов в двоичных элементах
Случайный патент: Способ производства чугуна