Способ преобразования параметров емкостного датчика
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1448289
Авторы: Гусев, Сиразетдинов






Текст
Изобретение относится к измерительной технике, в частности к способам преобразования параметров емкостных датчиков, и может быть использовано для автоматизации процессов измерения и контроля перемещений.Цель изобретения - повышение точности преобразования за счет уменьшения составляющей сигнала емкостно го датчика в выходном напряжении нелииейной мостовой схемы, а также за счет исключения фильтрации сигнала,На фиг. 1 приведена схема устройства, реализующего способ преобразования параметров емкостного датчика; на фиг. 2 - пример конкретного выполнейия этого же устройства с модулем аналогового входа.Устройство для преобразования параметров емкостного датчика (фиг. 1) содержит генератор 1 импульсов, упраВляемый по частоте, формирующий двухполярные импульсы напряжения, первую диодно-резисторную цепь, сос" 25 тоящую из диода 2 и резистора 3, емкостный датчик 4, подключенный между общей шиной и точкой соединения диода 2 и резистора 3, вторую диоднорезисторную цепь, состоящую из диода 30 5 и резистора 6,опорный конденсатор 7, подключенный между общей шиной и точкой соединения диода 5 и резистора 6,образцовый конденсатор 8, годклю. чеиный через ключевой элемент оптрона 9 к точке соединения диода 2 и резистора 3, блок 10 управления, выходы которого подключены к управляющему входу, генератора 1 импульсов и светоизлучателю оптрона 9. Емкость 11 ключе вого элемента ептрона образует последовательную цепь с образцовым конденсатором 8, Выходная шина устройства подключена к точке соединения резисторов 3 и 6. 45 Устройство согласно фиг. 2 содержит управляемый генератор 12 импульсов, формирующий двухполярные импульсы напряжения две диодно-резистор 1ные цепи, образованные диодами 13, 14 и резисторами 1 5 и 16, емкостный датчик 17, подключенный между общей шиной и точкой соединения диода 13 и резистора 15, опорный конденсатор 18, пОдключенный между общейшиной и точ 55 кой соединения диода 14 и резистора 16, образцовый конденсатор 19, подключенный через ключевой элемент оптрона 20 к точке соединения диода 13 и резистора 15, интегратор 21, вход которого подключен к точке соединения резисторов 15 и 16, схему 22 дискретизации и хранения с запоминающим конденсатором 23, вход которой соединен с выходом интегратора 21, аналогоцифровой преобразователь 24, соединенный со схемой 22 дискретизации и хранения через входную шину и шину сигнала состояния, микропроцессор 25, соединенный с входом управления интегратора 21, светоизлучателем оптрона 20, управляющим входом генератора 12 импульсов, а также с аналого-цифрововым преобразователем 24 через шину 26 управления и информационную шину 27 аналого-цифрового преобразователя. Шина 28 инициирования и информационная шина 29 микропроцессора 25 предназначены для связи с центральным процессором.Устройство (фиг. 1) работает следующим образом.Емкостной датчик 4 и опорный конденсатор 7 запитываются через диоды 2, 5 импульсами напряжения с. выхода генератора 1 импульсов. При этом, в точке соединения диода 2 и резисто ра 3 формируются импульсы напря - жения с длительностью спада, определяемой постоянной времени перезаряда суммарной емкости датчика 4 и емкости цепи, образованной последовательно соединенными образцовыми конденсатором 8 и емкостью 11 ключевого элемента оптрона 9. В точке соединения диода 5 и резистора 6 формируются импульсы напряжения с длительностью спада, определяемой постоянной времени перезаряда опорного конденсатора 7. При условии, что длительность импульсов генератора 1 не менее чем в 5 раз превышает постоянные времени перезарядных цепей, постоянное выходное напряжение нелинейной мостовой схемы при закрытом ключевом элементе оптрона 9 можно принять равным Б Б Г (С -С ) "выем "н р+)(7)К В., (С -С ) где П бы- выходное напряжение нелинейной мостовой схемы;11,ь в . амплитуда напряжения наемкостном датчике 4 и опорном конденсаторе 7;Г - частота импульсов генератора 1;5К - сопротивление резисторов3, 6;К всопротивление нагрузки нелинейной мостовой схемы,К = ЕКн(к+2 Кн)2: " - эквивалентное сопро+н1тивление перезарядкой цепи,5 с: с +-хц4 С 8+СС - емкость датчика 4;Сь - емкость образцового конденсатора 8; 20С и - емкость ключевого элементаоптрона 9;/, С - емкость опорного конденсато"гра 7.С учетом нестабильности( парамет ров генератора и элементов нелинейной мостовой схемы выражение (1) записывается в виде= ЦЫ (С., -С 7) + 13 о, (2)30 где 11 - составляющая выходного напряжения, обусловленная температурной и временной нестабильностью параметров элементов схемы.В режиме формирования напряжения раз-З 5 баланса нелинейной мостовой схемы блок 10 управления формирует ка управляк- щем входе генератора 1 сигнал, устанавливающий высокую частоту импульсов на выходе генератора. Емкостной датчик 4 может быть представлен в виде модели из двух параллельно соединенных конденсаторов: постоянной пара-. зиткой составляющей С и переменной составляющей С = ЕБЙ, где Я ди 45 электрическая проницаемость, Б - пло щадь пластин датчика, 6 - расстояние между пластинами.При С = С + евыражение (2) 50СеСпС +С,принимает. вид ЯБ 1 =1 ГК - +О,еьиГ в е,1 е В режиме формирования накряжения нулевого уровня 11 еы блок 10 управления формирует на управляющем входе генератора 1 сигнал, понижающий час тоту импульсов ка вьмоде генератора до значения РГ/1 0 . Сигнал разба 9ланса нелинейной мостовой схемы, создаваемый емкостным датчиком 4, уменьшается и составляет не более 0,17. от своего первоначального значения, Поэтому напряжение нулевого уровня равноБ ЯРКвм,о ж е - Ф ц 1, (4)о о 11 ьь = ЦРК ( - + Сп+С Ст)сБ о мР , Са 11 о (5)Результат измерения ь определяетсяотношением-(6) Е ЕБ Р С,й 11 еьп 1 еьп,о 1 ььц,ь 11 вых.о Устройство (фиг. 2) работает сле". дующим образом.Цикл преобразования состоит изтрех тактов, каждый из которых состоит из периода интегрирования йц и периода преобразования й. Длительность периода интегрирования выбирается равным или кратным длительности периода импульсов низкой частоты Р генератора 12. Цикл преобраэова" ния начинается с установки низкой частоты Р на выходе генератора 2 импульсов, обесточивания светоизлучателя оптрона 20 и приведения интег" ратора 21 и аналого-цифрового преобразователя 24 в исходное состояние. В первом тайте преобразования за время интегрирования Г = 1/Р на вьмоде интегратора 21 устанавливается напряжение равное В режиме формирования.напряжения полной шкалы 11 еь, ы блок 10 управления фррмирует сигнал, понижающий частоту импульсов на выходе генератора, и сигнал, открывающий ключевой элемент оптрона 9; При выборе СВ Ь 10 СФ , где Скмркс максималь 3ное значение переменной составляющей Ск модели датчика, составляющие сигнала раэбаланса, создаваемые емкостным датчиком 4 и опорным конденсатором 7, малы по сравнению с составляющей сигнала раэбаланса, определяемой емкостью образцового конденсатора 8. Напряжение полной шкалы равно289 6Ми заносится в память микропро" цессора 25. В случае измерения перемещения, характеризуемого расстоянием Й между пластинами емкостного датчика, вычисление результата измерения производится в микропропссоре 25 по формуле 1448(/Гц - Б с 11 -(7)1 г " Б,ьых.о Т,) д Тр 10где Т - постоянная времени интегриро"6вания.Схема 22 дискретизации и хранения осуществляет слежение эа уровнем сигнала на выходе интегратора 21 в те" чение времени интегрирования йц. и 10 поддерживает неизменным уровень сигнала на своем выходе в течение временипреобразования С, во врем которого аналого-цифровой преобразователь24 преобразует напряжение Бе" 15 цифровой код Я , С выхода аналого-цифрового преобразователя 24, код Б передается по информационной шине 27 в . микропроцессор 25 и заносится в память микропроцессора. В течение этого 20 же периода времени е интегратор 21 и аналого"цифровой преобразователь 24 приводятся по входам управления в исходное состояние и открывается ключевой элемент оптрона 20. Всем процессом преобразования и передачи сигналов управляет микропроцессор 25, в соответствии с командами которого возбуждаются управляющие входыэлементов схемы. Во втором такте преобра зования за время е на выходе инцтегратора 21 устанавливается напряжение," равное цс0= Т(П 1 х Са+ П,И =10 Нц- Н 11 ю 11 ф(10) 35 В. С+0 е ПоТв ТР В течение временивторого такта напряжение Б , ы преобразуется в код 40 И ы и заносится в память микропроцессора 25, В этот период времени п интегратор 21 и аналого-цифровой преобразователь 24 приводятся в исходное состояние, закрывается ключевой 4 б элемент оитрона 20, а на выходе генератора 12 импульсов устанавлива, ется высокая частота Е. В третьем такте преобразования за время 2 ц на выходе интегратора 21 устанавливается напряжение, равное8Ььп,х ТО" Я + " (9)ТГ с"-. Й ТГ 1. Способ преобразования параметров емкостного датчика, заключающийбб ся в том, что на нелинейную мостовуюсхему, содержащую емкостный датчик и опорный конденсатор, подают импульсное напряжение и формируют на выходе нелинейной мостовой схемы последоВ течение времени йтретьего тактанапряжение 11 , к преобразуется в код где Ы - коэффициент пропорциональности.Формирование высокой частоты Г инизкой частоты Р может осуществляться микропроцессором программно, приэтом генератор импульсов выполняется в виде формирователя.двухполярныхимпульсов,Понижение частоты генератора импульсов по -предлагаемому способу позволяет уменьшить во столько же раэсоставляющую. выходного напряжения,создаваемую емкостным датчиком, безиспользованиякаких-либо коммутирующих элементов в цепи емкостного датчика. Так, при понижении частоты генератора в 10 раз погрешность назпряжений нулевогр уровня и полнойшкалы от изменения емкости датчикане превышает 0,1% от сигнала разбаланса нелинейной мостовой схемы.Интегрирование выходного напряжения нелинейной мостовой схемы запериод времени, равный или кратныйпериоду низкой частоты генератораимпульсов по сравнению с фильтрациейсигнала, обеспечивает более высокоебыстродействие и исключает необходимость применения фильтра низких частот со сложной структурой, увеличи-вающего габариты и снижающего надежность всего устройства.Устройство, реализующее предлагаемый способ, может быть использовано в качестве периферийной части поотношению к центральному процессорусистемы сбора и обработки данных. Формула изобретениявательно напряжение нулевого уровня, напряжение полной шкалы и напряжение пропорциональное разности токов перезаряда емкостного датчика и опорного конденсатора, о т л и ч а ю - щ и й с я тем, что, с целью повышения точности преобразованиями формирование напряжения нулевого уровня и напряжения полной шкалы производят 448289 8при понижении частоты импульсного на 3 5пряжения в 10 -1 О раз.2. Способ по и. 1, о т л и ч а ющ и й с я тем, что, с целью повышения быстродействия преобразования,выходные напряжения нелинейной мостовой схемы интегрируют за периодвремени, равный или кратный периоду 10 импульсов низкой частоты генератора.ректор С. Шекмар аказ 6843/50 Тираж 772 ПодписноеНИИПИ Государственного комитета по изобретениям и открыт 113035, Москва, Ж, Раушская наб., д. 4 ГКНТ СССР роизво но-полиграфическое предприятие, г. Ужгород, ул. Проектная,
СмотретьЗаявка
4255791, 27.04.1987
УФИМСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ ИМ. СЕРГО ОРДЖОНИКИДЗЕ, ПРЕДПРИЯТИЕ ПЯ Р-6094
ГУСЕВ ЮРИЙ МАТВЕЕВИЧ, СИРАЗЕТДИНОВ МАРАТ МАНСУРОВИЧ
МПК / Метки
МПК: G01R 17/10, G01R 27/26
Метки: датчика, емкостного, параметров, преобразования
Опубликовано: 30.12.1988
Код ссылки
<a href="https://patents.su/6-1448289-sposob-preobrazovaniya-parametrov-emkostnogo-datchika.html" target="_blank" rel="follow" title="База патентов СССР">Способ преобразования параметров емкостного датчика</a>
Устройство защиты генератора импульсов напряжения

Номер патента: 569017
Опубликовано: 15.08.1977
МПК: H03K 3/53
Метки: генератора, защиты, импульсов
...чертеже представлена принципиальная электрическая схема устройства защиты генератора импульсов напряжения.Устройство защиты содержит зарядное устройстзо 1, состоящее из повышающего трансформатора 2 и вентилей 3, управляемый механический коммутатор 4, защитные резисторы 5, накопительные конденсаторы б, датчик тока 7, быстродействующий короткозамыкатель 8, пусковое устройство 9.Устройство работает следующим образом, Заряд конденсаторов б обеспечивается через повышающий трансформатор 2 и вентили 3 через замкнутые контакты механического коммутатора 4 и защитные резисторы 5. В силу симметрии схемы ток заряда в нулевом проводе зарядного устройства 1 практически равен нулю. По окончании заряда конденсаторов б контакты механического...
Спиральный генератор импульсов напряжения

Номер патента: 1492453
Опубликовано: 07.07.1989
Авторы: Конесев, Мельников, Осинцев, Тухватуллин
МПК: H03K 3/53
Метки: генератор, импульсов, спиральный
...комбинат "Патент", г.ужгород, ул. Гагарина,101 Изобретение относится к импульсной технике и может быть использовано в системах зажигания, светотехнике, квантовой электронике.Целью изобретения является увеличение КПД устройства и повышение амплитуды импульсов напряжения.На чертеже представлена схема спи" рального генератора импульсов напряжения.Схема состоит иэ источника 1 постоянного напряжения, секций полосковой спиральной линии 2, каждая иэ ко" торых содержит проводящие ленты Э и изоляционную ленту 4, замкнутого магнитного сердечника 5, коммутатора 6Коммутатор 6 может быть выполнен в виде биполярного плоскостного лавинного транзистора, который обладает 2 О достаточным быстродействием и хорошей управляемостью. Коллектор...
Генератор импульсов с регулируемой скважностью

Номер патента: 1132340
Опубликовано: 30.12.1984
Автор: Реута
МПК: H03K 3/02
Метки: генератор, импульсов, регулируемой, скважностью
...выводом токоорганичивающего резистора 8 и одним из выводов потенциометра 7, движок которого соединен с анодом второго диода 6.Генератор работает следующим образом.В момент включения напряженияпитания конденсатор 3 разряжен. Допустим, на выходе второго инвертора 2 напряжение равно "1", т.е. Е(здесь Е - напряжение питания инверторов), тогда на его входе и выходепервого инвертора 1 напряжение равно "О", а на входе первого инвертора 1 напряжение равно "1", В этомслучае конденсатор 3 начнет заряжаться выходным напряжением второго инвертора 2 через токоограничивающий резистор 8, часть потенциометра 7,диод 6 и выход первого инвертора 1,По мере заряда конденсатора 3 напряжение на резисторе 4 и на входе первого инвертора 1 будет падать по...
Управляемый генератор импульсов
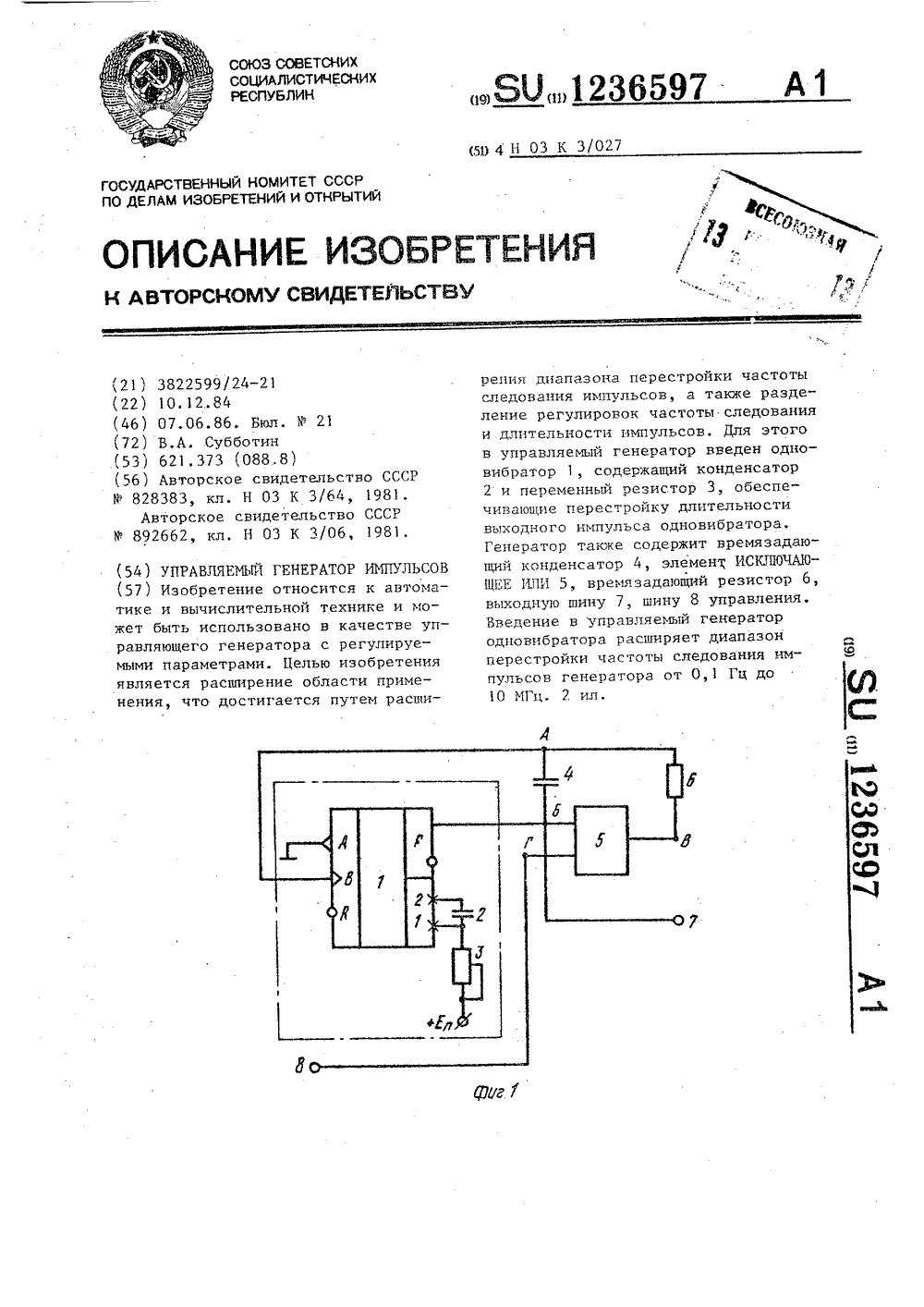
Номер патента: 1236597
Опубликовано: 07.06.1986
Автор: Субботин
МПК: H03K 3/027
Метки: генератор, импульсов, управляемый
...45вызывает заряд конденсатора 4, Прицостижении в точке А уровня запуска(11, фиг. 2) одновибратора проис 1 цп 1 цходит изменение уровня от 0 дов точке Б (время ь , фиг. 2), в 5 О1 цточке В устанавливается уровень 0Далее происходит заряд конденсатора4, в другом направлении до моментаокончания импульса (время 1 , фиг,2),вырабатываемого одновибратором 1 55длительность импульса определяетсявремязадающей целью, состоящей изконденсатора 2 и переменным резистором 3, Для того, чтобы запретитьработу генератора на шину 8 требуется подать уровень логического нуля.При этом возможны следующие ситуации,В случае, когда импульс) Формируемый одновибратором 1 в точке Б,еще не окончен, при подаче на шину8 логического нуля (время 1фиг.2)на выходе логического...
Генератор импульсов напряжения гиперболической формы

Номер патента: 1700746
Опубликовано: 23.12.1991
Авторы: Бродовский, Замбрджицкий, Морозов
Метки: генератор, гиперболической, импульсов, формы
...входом операционного усилителя 7, вьход ко- ЗОТОРОГО С 08 ДИНЕН ВТорЫМ ВЫВОДОМ ВТОРОГО . резистора 8 и свыходной шиной 9, а неинВ 8 ртирующий Вход с Общей шинОЙ, с которой, с 08 динены первые выоды 35кочденсаторов 4 Л, 4,2, , 4.П, причем пер.Вый ВЫВОД первоГО резистора 6 сОеднен сшинОЙ 3 источника эталОННОГО напрЯжения,Генератор работает следующим образом, 4 ОБлок 1 управления вырабатывает импульс длительностью О,О 5 Г (фиг. 2), на время которого срабатывают контакть.двухпозиционных ключей 2.1, 2.2, , 2,п иондесаоры 4.1,4.2, ,4,п заряжаются до 45напряжения Оо источника эталонного напряж 8 ния.ПО заднему фронту управляющеГО импульса конденсаторы 4.1, 4.2, , 4.п одновременно начинают разряжаться через 5 О соответствующие масштабные...
Предыдущий патент: Способ настройки интегральных тензометрических мостов
Следующий патент: Трансформаторный мост
Случайный патент: Лопатка сушильного барабана