Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
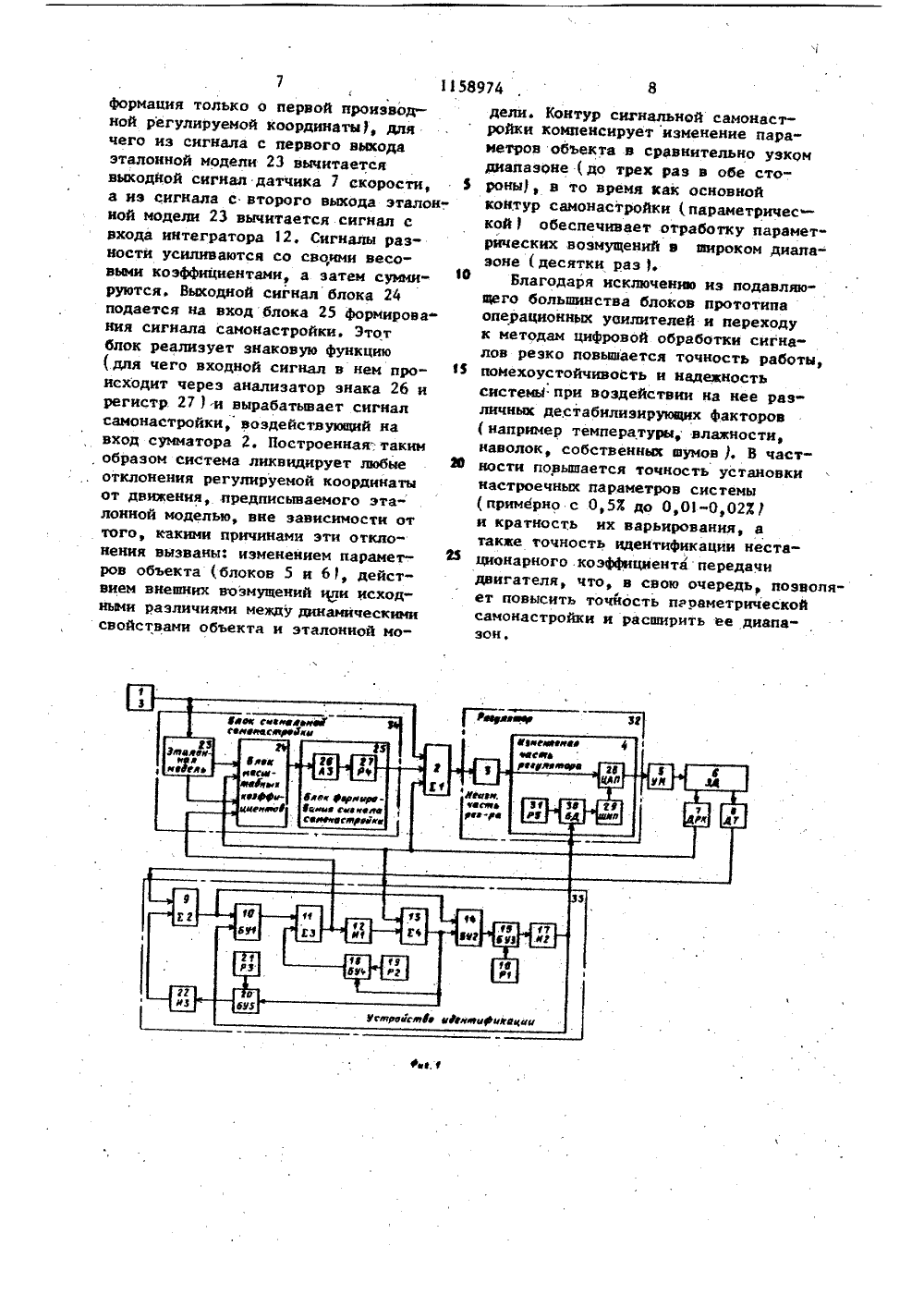
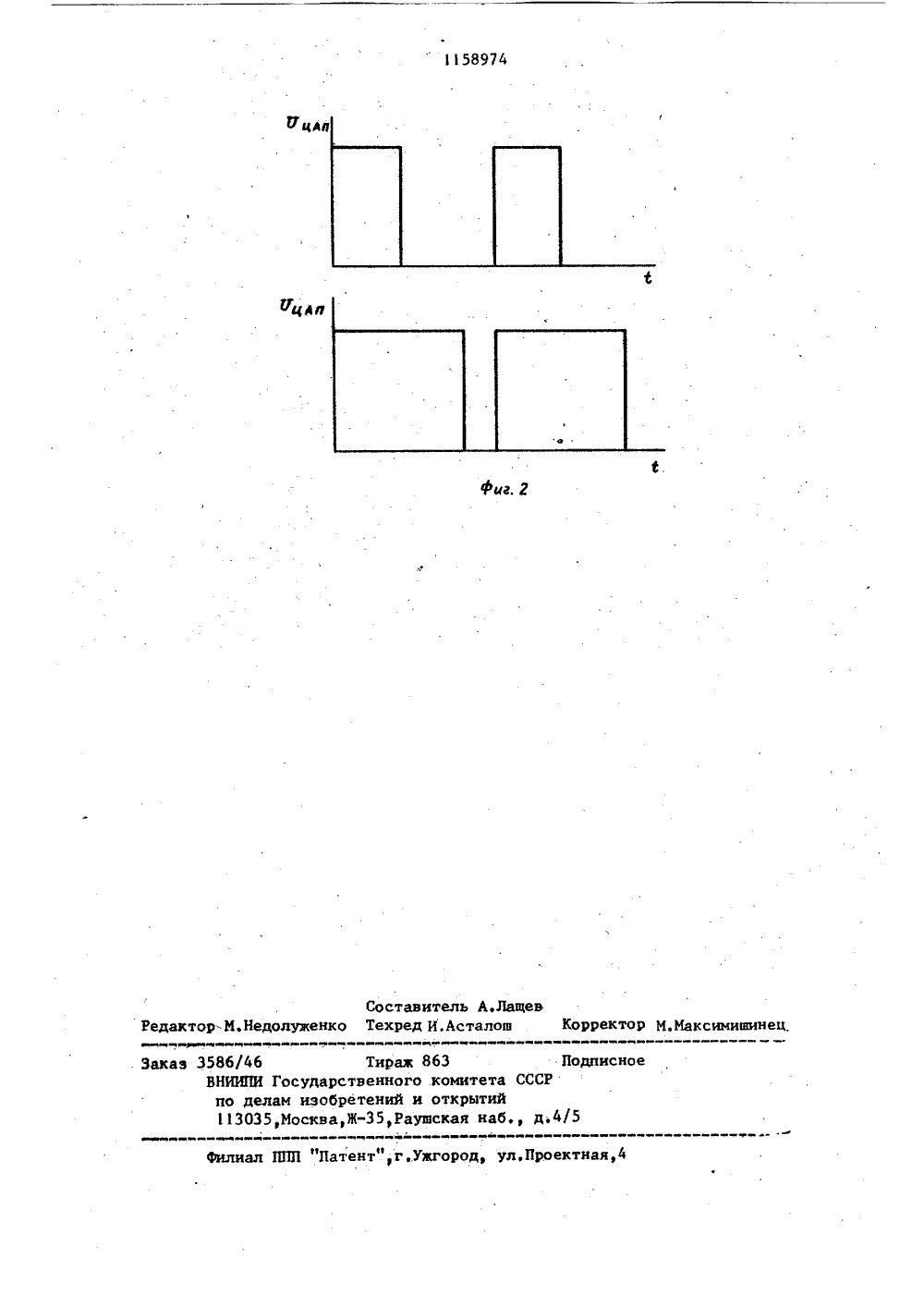
1 второй вход присоединен к выходу пятого регистра, первый вход третьего блока умножения подключен к выходу второго блока умножения, вто" рой вход - к выходу первого регистра, а выход - к входу второго интегратора, выход. четвертого сумматора соединен с первыми входами четвер- . того и пятого блоков умножения, вторые входы четвертого и пятого блоков умножения подключены к выходам соответственно второго и третье 158974го регистров, выход четвертого блока умножения соединен с вторым входом третьего сумматора, выход пятого блока умножения подключен к входу третьего интегратора, выход которого соединен с вторым входом второго сумматора, входом блока формирования сигнала самонастройки является вход анализатора знака, выходом - выход четвертого регистра, вход которого соединен с .выходом анализатора знака.Изобретение относится к автоматическому управлению и может бытьиспользовано для адаптийнога управле-ния электроприводаии нестационарныхобъектов с неупругой связью двигателя и механизма в станкостроении,металлургии, в системах автоматического управления рабочими органамироботов, в электромеханических системах при высоких требованиях к стабильности их динамических свойств вусловиях изменения параметров этихсистем во времени,Цель изобретения - повышение точности самонастраивающейся системы управления и расширение диапазона допус"тнмых изменений ее параметров. На фиг.1 изображена структурнаясхема предлагаемой самонастраиваю- ,20щейся системы управления; на фиг.2 диаграммы, иллюстрирующие изменениекоэФфициента передачи изменяемойчасти регулятора.Система содержит эадатчик 1, г 5первый сумматор 2, неизменяемуючасть регулятора 3, изменяемую частьрегулятора 4, усилитель 5 мощности,электродвигатель 6, аналого-цифровой6датчик 7 регулируемой координаты, 30аналого-циФровой датчик 8 тока,второй 9 сумматор, первыйблок 10 умножения, третий сум- .матор 11, первый интегратор 12,четвертый сумматор 13, второй блок 35уиножения 14, третий блок 15 умножения, первый регистр 16, второйинтегратор 17, четвертый блок 18 2/ умножения, второй регистр 19 пятый блок 20 умножения; третий регистр 21, третий интегратор 22, эталонную модель 23, блок 24 масштабных коэффициентов, блок 25 формирования сигнала самонастройки, состоящий из анализатора 26 знака и четвертого регистра 27, причем изменяемая часть 4 регулятора состоит иэ цифро" аналогового .преобразователя 28, ш ротно-импульсного преобразователя 29, блока 30 деления и пятого регистра 31.Основной контур регулирования (скорости двигателя ) образован задатчиком 1, первым сумматором 2, неизменяеиой частью регулятора 3, изменяемой частью регулятора 4, усилителем мощности 5 иэлектродвигателем 6 с аналого-цифровым датчиком регулируемой координаты 7, например датчиком скорбсти. Блоки 3 и 4, включая блоки 28-31, об разуют регулятор 32.Блоки 9-22 образуют устройство 33 идентификации коэффициента пере- ф дачи ток -скорость двигателя. В устройстве индентификации интегратор 22 совместно с блоками 20 и 21 осуществляет формирование сигнала, пропорционального току нагрузки ( т.е. отношению момента нагрузки к потоку возбуждения двигателя ), Блок 10 умножения и интегратор 12,соединенные последовательно через. сумматор 11, образуют настраиваемую модель двигателя. Поскольку на вход суиматора 9 подаются как сигнал,з 1158974 . 4 пропорциональный току двигателя, ходы - соответственно к первому н снимаемый с датчика тока 8, так и второму входам седьмого сумматора. сигнал, пропорциональный току нагруэ" Цифровая часть самонастраиваюки, то на вход настраиваемой модели щейся системы управления может% поступает та же величина, что ибыть выполнена нацифровых интегреально действующая на входе двигате- ральных микросхемах серий 1802, ля (динамический ток). Это позво, 33,530, 533, 572. Например, ляет использовать получаемый на вы . эталонная модель 23 может быть ходе сумматора 13 сигнал ошибки для реализована в виде цифрового фильтра настройки коэффициента передачи мо на интегральных микросхемах 133 седели ( так как эта ошибка обусловле- , рии (ЗЗИП 4,133 ТМ 5,133 ТМ 7,133 ИМЗ ) на только различием коэффициентов интеграторы 2, 17 и 22 - на микро- передачи двигателя и модели ) и, сле- схемах 133 ИП 4, 133 ТМ 5; сумматоры 2, довательно, для идентификации коэф,11 и 13 - на микросхемах 133 ИП 4, 4 ициента передачи двигателя 6. 5 1 ЗЗИМЗ; регистры 6,19,21,27 Оценка коэффициента передачи двига- и 31 - на микросхемах 133 ТМ 5, 133 ТМ 7 теля, вырабатываемая интегратором 17, блоки умножения 10,14,15,18 и 20 и подается на управляющий вход изменяе- блок деления 30 - на арифметическом мой части 4 регулятора 32, настраивая расширителе ( умножителе) серии 1802, его коэффициент передачи (парамет- Ж на микропроцессоре 1804 ВС 1; неиэрическая самонастройка ). меняемая часть регулятора 3 можетБлоки 23-25, образующие блок 34 быть реализована как цифровой П-, сигнальной самонастройки, обеспе- ПИ- или ПИД-регулятор .на элементах чивают сигнальную самонастройку серий 1802,1804, 133 и др. системы. ИБлоки 5 и б - аналоговые, бло- Работа самонастраивающейся систеки 7 и 8 - аналого-цифровые бло- мы УпРавления, например скоростью1ки 28 и 29 - цифро-аналоговые вращения электродвигателя с пере 1остальные блоки 1-3, 9-27, 30 и 31 менным пРиведенным моментом инеРции выполнены в цифровом виде. Регист- Зб и Регулируемым потоком возбуждения, Ры весовых коэффициентов р 1-р 3 р 5 происходит следующим образом. в сочетании с соответствующими бло- Задатчик 1 вырабатывает последова" ками умножения и деления а такжеЭ тельность цифровых выборок эадающерегистр. Р 4 позволяют задаватьго аналогового сигнала, именуемую параметры системы ( алгоритма управле-Э вв дальнейшем для кратности цифровыми ния ) путем занесения в эти регистаадающим сигналом, Этот сигнал через ры соответствующих кодосигналов.сумматор 2 н неизменяемую часть регулятора 3 поступает на цифро-аналогоБлок 24 масштабных коэффи ентфф ци тов вый преобразователь 28 и послеможет быть реализован, наприме с 40Р Р 46 преобразования в аналоговую величинпомощью пятого суммато а пе вумм р , первый ипередается через усилитель мощносвторой входы которого являются соот- ти 5 нна электродвигатель б, который ветственно первым и третьим вхо ар да-благодаря совместному действиюми блока масштабных коэффициентовффици тов, регулятора 32 и отрицательной обрат- входы которого являются соответственно вторым и четвертым вхо амии четвертым входами ет скорость вращения, соответствуюблока масштабных коэффициентов седь- щж данному задающему сигналу, Настмого сумматора, выход которого служит роечные параметры регулятора 32.выходом блока масштабных коэф- Ю выбраны таким бтаким о разом, что прифициентов, последовательно соединен- номинальном приве нриведенном моментеных шестого регистра и шестого блока инерции двигателя и номинальномненных седьмого регистра и седьмого свойства системыбыстродействиеблока умножения, причем вторые . И и динамичи динамические ошибки по управлеи возмущению ) удовлетворяютвходы указанных блоков умножения нию и возмущению ) вподключены к выходам соответственно техническим.требованиям и считаютпятого и шестого, сумматоров а вы", ся оптимальимчя оптимальимчи.Предположим, что коэффициент передачи двигателя между током и скоростью изменился, например уменьшился вследствие уменьшения потока ,возбуждения или увеличения приве денного момента инерции. В этом случае во время переходного процесса, вызванного, например, увеличением цифрового задающего сигнала, выходной цифровой сигнал датчика 810 тока, проходя через блоки 9 - 12, вызовет изменение выходного сигнала интегратора 12, который вычитается в сумматоре 13 из цифрового сигнала датчика 7 скорости, и на выходе сум 15 матора 13 появится отрицательный сигнал ошибки. Будучи умножен в блке 14 на положительный выходной сигнал сумматора 9, он, проходя20 через блок 5, вызывает уменьшение выходного сигнала интегратора 17, вследствие чего коэффициент передачи блока 10 умножения по первому входу уменьшается до тех пор, пока ошибка на выходе сумматора 13 не станет равней нулю, а коэффициент передачи по первому входу блока 10 умножения, т.е, выходной сигнал интегратора 17, не станет равным коэффициенту передачи двигателя, чем30 и обеспечивается его идентификация. Контур, образованный блоками 11 -13 и 18 (вместе с 19 ), обеспечивает затухание начальной ошибки, возникающей на выходе сумматора 13. Э 5 Цифровой сигнал с выхода интегратора 17. поступает на управляющий вход изменяемой части 4 регулятора 32, увеличивая коэффициент передачи регулятора н компенсируя, таким образом, уменьшение коэффициента передачи двигателя, чем и достигается эффект параметрической самонастройки. Перенастройка коэффициента передачи регулятора 32 осуществляется, например, путем изменения скважности последовательности импульсов питания, подаваемых на цифро-аналого" вый преобразователь 28. На фиг,2 фф показаны диаграюы выходного цифро- . аналогового преобразователяпри различных ( до и посре самонастройки ) значениях коэффициента передачи изменяемой части регулятора: во втором случае коэффициент передачи увеличился в 2 раза (пример взят условно ), что эквивалентно увеличеиию вдвое среднего значения выходного тока усилителя 5 мощности.Точная идентификация коэффициентапередачи двигателя оказывается воэ" можной благодаря тому, что на входе настраиваемой модели двигателя, образованной блоком 10 умножения и интегратором 12, формируется сигнал, пропорциональный динамическому току. С этой целью интегратор 22 осуществляет идентификацию составляющей тока, пропорциональной отношению момента нагрузки к потоку возбуждения. Пусть, например, увеличился момент нагрузки двигателя. В этом случае скорость двигателя начнет уменьшаться, а ток - возрастать; Поскольку сигнал на выходе интегратора 22 соответствует прежнему значению. момента нагрузки, то выходной сигнал сумматора 9 перестанет соответствовать динамическому току, воздействующему на двигатель. Выходной сигнал интегратора 12 увеличивается, а сигнал с выхода датчика 7 скорости уменьшается. Под действием возникшего на выходе сумматора 13 отрицательного сигнала ошибки выходной сигнал интегратора 22 (,его знак отрицателен ) начнет возрастать до тех пор, пока не придет в соответствие с новым значением момента нагрузки.Блок 34 сигнальной самонастройки обеспечивает согласование динамики системы с динамикой эталонной модели 23 путем подачи на вход сумматора 2 дополнительного сигнала самонастройки. Эталонная модель 23 наст. раивается, исходя из желаемого вида реакции системы на сигнал эадатчика 1. При параметрических возмущениях контур параметрической самонастройки вследствие своей инерционности вступает в действие не сразу, Напротив, контур сигнальной самонастройки начинает немедленно ликвидировать ошибку, между скоростью двигателя и выходом эталонной модели. Блок 24 масштабных коэффициентов формирует сигиапы ошибок по скорости и ее производной ( предполагается, что система с жесткой связью между двигателем и механизмом всегда может быть представлена эквивалентной системой второго порядка, в связи с яем для обеспечения устойчивости процесса адаптации необходима информация только о первой производной регулируемой координаты), длячего из сигнала с первого выходаэталонной модели 23 вычитаетсявыходной сигнал датчика 7 скорости,а иэ сигнала с второго выхода эталонной модели 23 вычитается сигнал свхода интегратора 12, Сигналы разности усиливаются со своими весовыми коэффицненгами, а затем суммируются. Выходной сигнал блока 24подается на вход блока 25 формирования сигнала самонастройки. Этотблок реализует знаковую функцию( для чего входной сигнал в нем происходит через анализатор знака 26 ирегистр 27 ) и вырабатывает сигналсамонастройки, воздействующий навход сумматора 2. Построенная.:такимобразом система ликвидирует любыеотклонения регулируемой координатыот движения, предписываемого эталонной моделью, вне зависимости оттого, какими причинами эти отклонения вызваны: изменением параметров объекта (блоков 5 и б ), действием внешних возмущений нли исходньяи различиями между динамическимисвайствамн объекта и эталонной модели. Контур сигнальной самонастройки компенсирует изменение параметров объекта в сравнительно узкомдиапазоне ( до трех раз в обе стоФ роны), в то время как основнойконтур самонастройки 1,параметрнчес -койобеспечивает отработку параметрйческих возмущений в широком диапазоне ( десятки раз ),Благодаря исключению из подавляющего большинства блоков прототипаоперационных усилителей и переходук методам цифровой обработки сигналов резко повышается точность работы,1 помехоустойчивость и надежностьсистемЫ при воздействии на иее различных дестабилизирующих факторов(например температуры, влажности,наволок, собственных шумов ). В частфф ности повышается точность установкинастроечных параметров системы(примерно с 0,5 Х до 0,01-0 023)и кратность их варьирования, атакже точность идентификации нестафф ционарного коэффициента передачидвигателя, что, в свою очередь, позволяет повысить точность параметрическойсамонастройки и расширить ее диапазон,1158974 г. 2 рректо ксимиоинец. 3 3586/46 Тираж 863ВНИИПИ Государственного комитета ССпо делам изобретений и открытий13035,Москва,Ж,Рауаская набфилиал ППП "Патент" г.ужгород, ул. По о д,4/5 Проектная,4 Составитель А,ЛащевРедактор-И.Недолуженко Техред И.Асталов
СмотретьЗаявка
3675244, 19.12.1983
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА ЭЛЕКТРОТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. И. УЛЬЯНОВА
БАБКИН ВЛАДИСЛАВ ВАЛЕНТИНОВИЧ, БОРЦОВ ЮРИЙ АНАТОЛЬЕВИЧ, ВТОРОВ ВИКТОР БОРИСОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: самонастраивающаяся
Опубликовано: 30.05.1985
Код ссылки
<a href="https://patents.su/6-1158974-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Дискретный регулятор периодического сигнала

Номер патента: 1257610
Опубликовано: 15.09.1986
Автор: Панов
МПК: G05B 11/01
Метки: дискретный, периодического, регулятор, сигнала
...1,0.При уменьшении в выходном сигналепостоянной составляющей (Фиг, 23)30 следующих друг за другом импульса в момент превышения выходным сигналомполусуммы опорныхнапряжений.Первый изимпульсов используется как тактовыйдля работы реверсивных счетчиков 7и 8, а второй - в качестве импульсаСБРОС для возврата ЕБ-триггеров 3и 4 в исходное состояние.э Э 5 40 45 50 55 Дешифратор 6 направляет тактовыеимпульсы формирователя 5 на входсчетчика 7 при выходных сигналахтриггеров 3 и 4 - 0,0 и 1,1 или навход счетчика 8 при комбинациях1,0 и 0,1,В качестве дешифратора 6 можетбыть использован, например, четырехвходовый, селектор-мультиплексор, укоторого попарно соединены нужныевыходы. При поступлении тактовыхимпульсов на вход реверсивного счетчика 7...
Устройство для оценки искажений дискретного сигнала в каналах передачи данных

Номер патента: 218210
Опубликовано: 01.01.1968
Авторы: Дарова, Зубовский, Пугач, Чернобыльский
МПК: H04J 3/14
Метки: данных, дискретного, искажений, каналах, оценки, передачи, сигнала
...ХМВ на время т+тз(тьНа сумматоры 12 по модулю два подается сигнал от датчика 9 испытательной последовательности через переключатель 13 и сигналы от соответствующих разрядов накопителя. В конце посылки на выходе сумматоров 2 появляются сигналы в случае, когда в соответствующей точке принятый сигнал отличен от переданного (испытательного),Эти сигналы через схемы совпадения 14 (Игг - И 99) сигналов от любых двух сумматоров 12 в момент прихода задержанного на длительность т, элементом задержки 11 импульса с выхода делителя 3 записываются в соотвстствующие счетчики, число которых равно числу схем совпадения, Схема совпадения 14 И г 1 связана с сумматорами 12 г и 121.В таблице показаны сигналы на выходе сумматоров 12 и сигналы па выходе схем...
Способ передачи и приема сигнала изображения и устройство передачи и приема сигнала изображения
Номер патента: 748906
Опубликовано: 15.07.1980
Авторы: Грудзинский, Межов, Шостацкий
МПК: H04N 7/18
Метки: изображения, передачи, приема, сигнала
...на вхоц делителя 4 частоты (625:1), исключают каждый 625 импульс. Это приводит к тому, что каждое телевизионное поле удлиняется на половину строки (до 313 строк) и строки четных полей совмещаются со строками нечетных полей. Полосу частот полученного таким образом. видеосигнала ограничивают до величины 2 МГц. Преобразование видеосигнала с полосой частот 2 ИГц в ви-деосигнал с полосой частот 1 ИГц осуществляют обычным чересточечным перемежением, которое производят так, что 20 получается растр, участок которого изображен на фиг. 2, Буквой а обозначены элементы изображения, содержащиеся в нечетных полях, а буквой 8 - элементы изображения четных полей. 25 В результате чересточечного перемежения спектр видеосигнала оказывается...
Устройство амплитудного компандирования для передачи и приема сигнала с одной боковой полосой

Номер патента: 1177916
Опубликовано: 07.09.1985
МПК: H04B 1/64
Метки: амплитудного, боковой, компандирования, одной, передачи, полосой, приема, сигнала
...структурная О электрическая схема устройства амплитудного компандирования для передачи и приема сигнала с одной боковой полосой.15Устройство содержит на передающей стороне источник 1 сигнала содной. боковой полосой (ОБП), первый управляемый усилитель 2, генератор 3 пилот-сигнала, дополнительный 2 Оуправляемый усилитель 4, сумматор 5,разветвитель 6, усилитель 7 пиковыйдетектор 8 и передатчик 9, а наприемной стороне - приемник 10,второй управляемый усилитель 11, 25блок 12 автоматической регулировкиусиления, фильтр 13 пилот-сигнала,детектор 14 пилот-сигнала, детектор15 сигнала с ОБП и усилитель 16.Устройство амплитудного компанди- ЗОрования для передачи и приема сигнала с одной боковой полосой работает,следующим образом.Однополосный сигнал...
Система передачи и приема сигнала изображения

Номер патента: 1494246
Опубликовано: 15.07.1989
Автор: Гуднов
МПК: H04N 1/41
Метки: изображения, передачи, приема, сигнала
...выводится информация о нулевом (из элемента 35 памяти)и первом (из элемента 36 памяти) коэффициентах косинусного кодированиявсех текстурных областей кодирования,затем в следующем телевизионном кадре - о втором (из элемента 37 памяти)и третьем (из элемента 38 памяти)коэффициентах косинусного кодирования и т.д. Таким образом, вначалепередается информация о более грубойтекстуре изображения, а в заключение - о наиболее мелкой текстуре, Изописания работы устройства 1 кодирования сигнала изображения следует.что передача сигнала иэображениянимает время, равное 13 телевизионным кадрам, которые распределены следующим образом: передача сигнала фоновой составляющей (первый кадр),сигнала контуров изображения (второй - девятый кадры), сигнала тексту...
Предыдущий патент: Система автоматического управления двухсвязным объектом
Следующий патент: Система управления
Случайный патент: Способ переработки полиминеральных калийных руд