Устройство для программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1108392
Авторы: Макаров, Преображенский, Эйнгорин





Текст
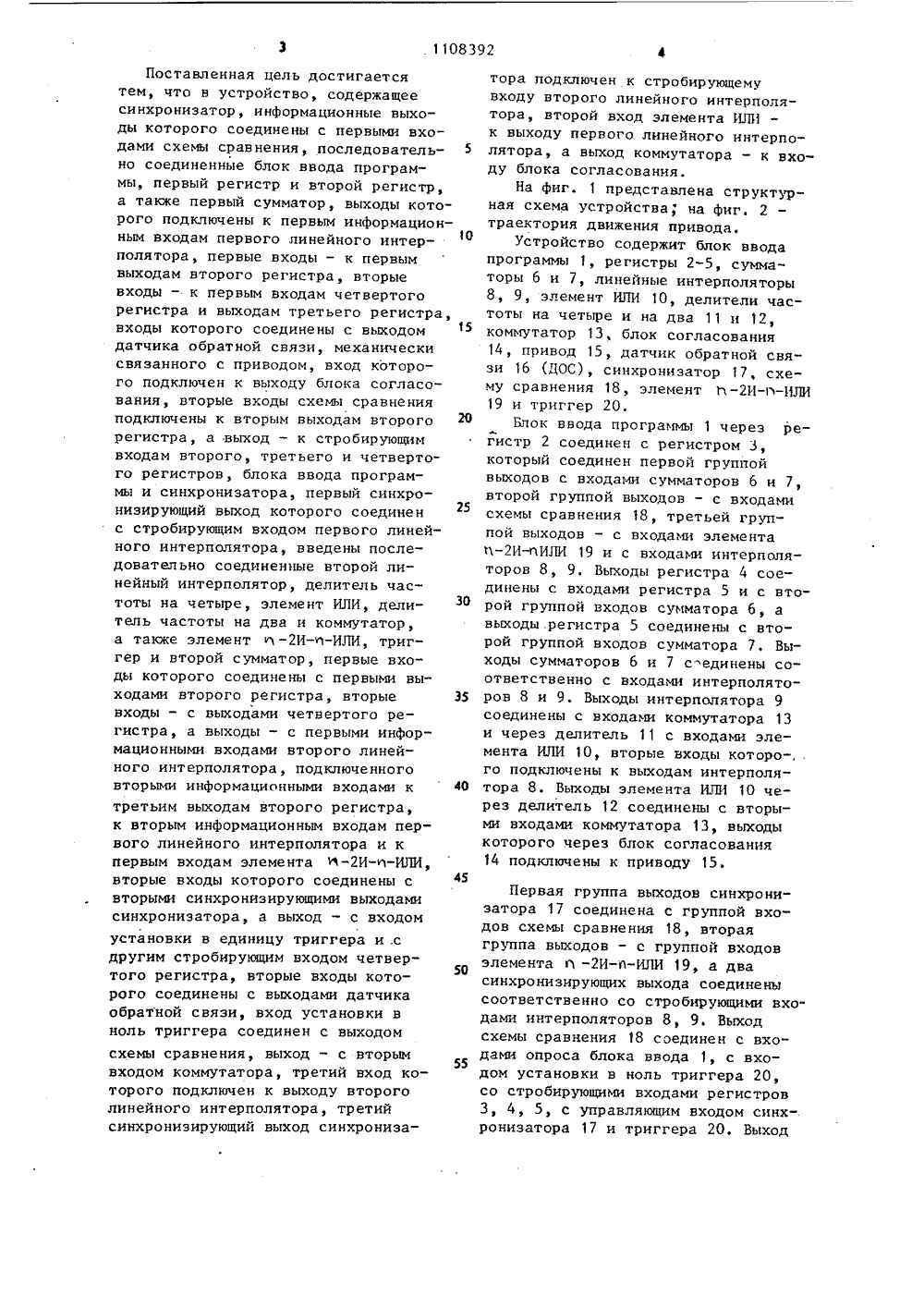
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИН ц С 05 В 19/1 ГОСУДАРСПО ДЕЛ ИСАНИЕ ИЗОБРЕТЕНИЯ 3476997/24-2423.07.8215.08.84.Н,Н. МакарПреображ Бюп. Р 30 ов, М.Я. Эй енский ори ьскийри орьковскии ис -технический едоват ститут щ овском государственном еим. Н.И. Лобачевского 621.503.55(088.8) 1. Авторское свидетельс 646, кл. С 05 В 19/18, Авторское свидетельств 419, кл. С 05 В 19/18,универности устроиства, в ненпе ния тво СССР1972,о СССР1975. Ф 3(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УП ЛЕНИЯ, содержащее синхронизатор, информационные выходы которого соединены с первыми входамисхемы сравнения, последовательнососдиненные блок ввода программы,первый регистр и второй регистр,а также первый сумматор, выходыкоторого подключены к первым информационным входам первого линейногоинтерполятора, первые входы - к первым выходам второго регистра, вторые входы - к первым входам четвертого регистра и выходам третьегорегистра, входы которого соединеныс выходом датчика обратной связи,механически связанного с приводом,вход которого подключен к выходублока согласования, вторые входысхемы сравнения подключены к втоым выходам второго регистра,(21) ( 2 2.) ( 4 6 ) ( 7 2 ) и А.В (71) физик Горьк ситет (53) (56) 9 3362 Т 8 ЕННЫЙ НОМИТЕТ СССРМ ИЗОБРЕТЕНИЙ И ОТКРЫТИИ ТОРСИОМЪ/ СВИДЕТЕЛЬСТВ Авторское свидетельство СС 449, кл, С 05 В 19/04, 1971 отип). выход - к стробирующим входам второго, третьего и четвертого регистров, блока ввода программы и синхронизатора, первый синхрониэирующий выход которого соединен со стробирующим входом первого линейного интерполятора, о т л и ч а юе е с я тем, что, с целью пого введены последовательно соеди -ненные второй линейный интерполятор, делитель частоты на четыре,элемент ИЛИ, делитель частоты надва и коммутатор, а также элементйИИЛИ, триггер и второй сумматор, первые входы которого соединены с первыми выходами второгорегистра, вторые входы - с выхода -ми четвертого регистра, а выходы -с первыми информационными входамивторого линейного интерполятора,подключенного вторыми информационными входамн к третьим выходам второго регистра, к вторым информацион ным входам первого линеиного интерполятора и к первым входам элемента 1 -2 ИИЛИ, вторые входы которого соединены с вторыми синхронизирующими выходами синхронизатора,а выход - с входом установки в единицу триггера и с другим стробирующим входом четвертого регистра, вторые входы которого соединены с выходами датчика обратной связи, входустановки в ноль триггера соединенс выходом схемы сравнения, выход -с вторым входом коммутатора, третийвход которого подключен к выходу второго линейного интерполятора, третий синхронизирующий выход синхро108392 1 О 15 20 25 30 35 40 45 низатора подключен к стробирующемувходу второго линейного интерполятора, второй вход элемента ИЛИ - к 1Изобретение относится к автоматике и вычислительной технике и можетбыть применено при построении систем программного управления,Известна система программного управления с шаговым приводом, содержащая интерполятор, импульснофазовый преобразователь, электронный коммутатор, шаговый двигатель,гидравлический усилитель мощностии датчик обратной связи, в которойдостигается высокая точность обработки, так как в результате установки датчика перемещений исключаются ошибки, вызываемые неточностями в изготовлении механическихзвеньев привода 13.Известно устройство для комбинированного числового программногоуправления, содержащее датчик обратной связи, сумматор, блок ввода,блок буферной памяти, интерполятор,блок регулирования контурной скорости, следящий привод, генератор импульсов, блок разгона и торможения.Благодаря введению коммутатора повьппается быстродействие устройства 23.В указанном устройстве так же,как и в системе 1, достигаетсявысокая точность обработки, благодаря наличию обратной связи, однако они характеризуются большой погрешностью линейного интерполятора,приводящей к неточности устройствв целом.Для достижения необходимой точности в таких устройствах требуется увеличение числа опорных точек,по которым производится интерполяция, что приводит к увеличениюобъема программы и усложнению вводных устройств. Кроме того, в известных устройствах отсутствует блокпамяти для запоминания значений координат в предшествующие моментывремени, что приводит к неточностиустройства. выходу первого линейного интерполятора, а выход коммутатора - к входу блока согласования. 2Наиболее близким к изобретению является устройство цифрового нрог" раммного управления, содержащее блок ввода программы, блок памяти, выполненный на регистрах и группах элементов И, блок формирования сигнала Смена цикла, интерполятор, сумматор, блок согласования, привод и датчик обратной связи, причем блок ввода программы через первый регистр и первую группу элементов И подключен к второму регистру, выходы которого через вторую группу элементов И подключены к третьему регистру, а выходы третьего регистра через третью группу элементов Исоединены с входами четвертого регистра, при этом выходы второго,третьего и четвертого регистровчерез сумматор соединены с входами пятого регистра, выходы которого подключены к интерполятору, а выходблока формирования сигнала "Сменацикла" соединен с стробирующими входами первой, второй и третьей групп элементов И, выход интерполятора через блок согласования поступает на привод, а выход датчика. обратной связи соединен с входом сумматора.В данном устройстве повышается надежность и благодаря блоку памяти для запоминания значений координат в предшествующие моменты времени повышается точность 31.Однако в известном устройстве велика погрешность линейного интерполятора, что приводит к неточности устройства в целом, либо к увеличению объема программы. Кроме того, в этом устройстве появляются большие скачки скорости в точках сопряжения линейных участков, что приводит к увеличению динамических ошибок.Цель изобретения - повышение точности и уменьшение динамических ошибок,третьим выходам второго регистра, к вторым информационным входам первого линейного интерполятора и к первым входам элемента ИИ-о-ИЛИ, вторые входы которого соединены с вторыми синхронизирующими выходами синхронизатора, а выход - с входомустановки в единицу триггера и .с другим стробирующим входом четвертого регистра, вторые входы которого соединены с выходами датчика обратной связи, вход установки в ноль триггера соединен с выходомсхемы сравнения, выход - с вторым входом коммутатора, третий вход которого подключен к выходу второго линейного интерполятора, третий синхрониэирующий выход синхрониза 45 Поставленная цель достигается тем, что в устройство, содержащее синхронизатор, информационные выходы которого соединены с первыми входами схемы сравнения, последовательно соединенные блок ввода программы, первый регистр и второй регистр, а также первый сумматор, выходы которого подключены к первым информационным входам первого линейного интерполятора, первые входы - к первым выходам второго регистра, вторые входы - к первым входам четвертого регистра и выходам третьего регистра, входы которого соединены с выходом 15 датчика обратной связи, механически связанного с приводом, вход которого подключен к выходу блока согласованин, вторые входы схемы сравнения подключены к вторым выходам второго 20 регистра, а выход - к стробирующим входам второго, третьего и четвертого регистров, блока ввода программы и синхронизатора, первый синхронизирующий выход которого соединен с стробирующим входом первого линейного интерполятора, введены последовательно соединенные второй линейный интерполятор, делитель частоты на четыре, элемент ИЛИ, делитель частоты на два и коммутатор, а также элемент о -2 ИИЛИ, триггер и второй сумматор, первые входы которого соединены с первыми выходами второго регистра, вторые 35 входы - с выходами четвертого регистра, а выходы - с первыми информационными входами второго линейного интерполятора, подключенного вторыми информационными входами к 40 тоРа подключен к стробирующемувходу второго линейного интерполятора, второй вход элемента ИЛИк выходу первого линейного интерполятора, а выход коммутатора - к входу блока согласования.На фиг. 1 представлена структурная схема устройства, на фиг. 2траектория движения привода,Устройство содержит блок вводапрограммы 1, регистры 2-5, сумматоры 6 и 7, линейные интерполяторы8, 9, элемент ИЛИ 1 О, делители частоты на четыре и на два 11 и 12,коммутатор 13, блок согласования14, привод 15, датчик обратной связи 16 (ДОС), синхронизатор 17, схему сравнения 18, элемент ПИ-ИЛИ19 и триггер 20,Блок ввода программы 1 через регистр 2 соединен с регистром 3,который соединен первой группойвыходов с входами сумматоров б и 7,второй группой выходов - с входамисхемы сравнения 18, третьей группой выходов - с входами элементацИ-ПИЛИ 19 и с входами интерполяторов 8, 9. Выходы регистра 4 соединены с входами регистра 5 и с второй группой входов сумматора 6, авыходы регистра 5 соединены с второй группой входов сумматора 7, Выходы сумматоров 6 и 7 с единены соответственно с входами интерполяторов 8 и 9. Выходы интерполятора 9соединены с входами коммутатора 13и через делитель 11 с входами элемента ИЛИ 10, вторые входы которо-,го подключены к выходам интерполятора 8. Выходы элемента ИЛИ 10 через делитель 12 соединены с вторыми входами коммутатора 13, выходыкоторого через блок согласования14 подключены к приводу 15. Первая группа выходов синхронизатора 17 соединена с группой входов схемы сравнения 18, вторая группа выходов - с группой входов элемента о -2 И-и-ИЛИ 19, а два синхроиизирующих выхода соединены соответственно со стробирующими вхо" дами интерполяторов 8, 9. Выход схемы сравнения 18 соединен с входами опроса блока ввода 1, с входом установки в ноль триггера 20, со стробирующими входами регистров 3, 4, 5, с управляющим входом синхронизатора 17 и триггера 20. Выходэлемента ПИ-г.-ИЛИ 19 соединен со стробирующим входом регистра 4 и единичным входом триггера 2 О, а выход триггера 20 соединен с управ. лещим входом коммутатора 13. 5Устройство работает следующим обрззомфН блоке ввода 1 записна программа, содержащая координаты опорных точек, программное время и период 10 интерполяции. По сигналу опроса блок 1 выдает одно значение программной координаты и соответствующие ей программное время и период интерполяции, которые записываются 15 в буфернь регистр 2. Регистры 3, 4 и 5 выполнены на синхроннь 1 х триггерах В -типа. Информация на выходе регистра появляется по окончании стробирующего сигнала. Регистр 20 5, кроме того, выполнен с входной логикой, обеспечивающей запись по первым или вторым информационным входам в зависимости от поступления "тробирующего сигнала по первому и и второму стробирующему входу. Сумматоры б и 7 выполнены ца логических потенциальных элементах обеспечивающих сохранение информации на выходе до тех пор, пока Зо присутствует информация ня входахблагодаря этому исключается необходимость в регистрах памяти на выходах сумматоров. Линейные интерполяторы 8 и 9 выполнены на целителях частоты,с переменным коэффициентом деления (микросхема К 155 ИЕЯ),и элементах И. В качестве делителей частоты 11 и 12 используются реверсивные счетчики. 40 Синхронизатор7 обеспечивает работу устройства в реальном времени. Он формирует на информационных входах двоичный 17-ти разрядный45 код времени, на вторых синхронизирующих выходах - короткие импульсные сигналы при изменении состояния соответствующего выходного разряда кода времени с нуля на единицу. а первом и третьем синхронизирующих вы 50 ходах формируются две несовпадающие во времени импульсные последовательности с частотами следования импульсов 2 шГц, используемые для тактирования интерполяторов 8 и 9. 555 Импульсные сигналы на первом и третьем синхронизирующих выходах появляются после того, как на вход синхронизатора поступит первый импульс со схемы сравнения 18.После осуществления подготовительных операций производится запуск программного режима. При этом считывается информация о первой опорной точке с буферного регистра 2 в регистр 3, записывается код с ДОС 1 б в регистр 4 и запускается блок ввода 1 для считывания информации в буферный регистр 2 о второй опорной точке. Далее устройство переходит в состояние ожидания сравнения реального времени с программным временем первого кадра, которое осуществляется в схеме сравнения 18.В момент сравнения кодов реального и программного времени схема сравнения 18 выдает импульс, который осуществляет перезапись в регистрах 3, 4 и 5, запуск блока ввода 1 и разрешает формирование синхронизатором тактовых импульсов на первом и третьем синхронизирующих выходах. При этом начинают работать интерполяторы 8, 9 и начинается программный режим управления приводом.Синхронизатор на вторых синхронизирующих выходах формирует короткие импульсы при изменении состояния соответствующего разряда с нуля на единицу. Код периода интерполяции Т., который выбирается равным 2 м с при И = О, 1,содержит единицу в одной из позиций, Кроме того Т и время С, со- соответствующее опорным точкам, выбираются так, чтобы выполнялось условие -= целое число. При посГ,а.туплении кода Т и импульсных сигналов с выхоцов счетчика на элемент аИ-юИИ 19 формируется импульсс, расположе нный на време нной оси посередине периода интерполяции. Триггер 20 формирует потенциальный сигнал, который в первой половине периода Т, равен нулю, а зо второй половине - единице, так как в нулевое состояние он устанавливается импульсом со схемы сравнения 18, а в единичное - импульсом с элемента 19. Формирование траектории, по которой перемещается привод, поясняется фиг. 2, на которой такке представлены временные диаграммы выход" ных сигналов блоков 18 и 19.В момент времени Е сигнал "Смена цикла" записывает в регистр 3 значение программной координаты А ,К 1 в регистр 4 значение действительной координаты Ас(С), а в регистр 5 переписывает информацию из регистра 4 о действительном значении координаты привода в момент времени Е , А(с, ).Сумматор 6 формирует разность А. А(.)3, а сумматор 7 А - А(Т:-)1На выходе интерполятора 8 за интервал времениГЧС + - (Формируется в канале "+" или "-" в зависимости от знака разности, унитарный импульсный код, равный -А - А(с,), а на выхо 4 Где интерполятора 9 - унитарный импульсный код А , - А()1, Получение в интерполяторе 8 половины разности достигается за счет подачи входной информации со сдвигом на один разряд.Код с интерполятора 9 после прохождения через делитель частоты на четыре 11 равен вА,- Ас(1- )1Унитарные импульсные коды поступают на двухканальный элемент ИЛИ 10, где они суммируются, а после прохождения суммарного кода через делитель частоты на два 12 формируется унитарный импулЬсный код, представляющий среднее арифметическое унитарных кодов, поступивших на входы элемента ИЛИ 10. Полученный с делителя частоты12 унитарный код поступает на первые входы коммутатора 13, в котором разрешается прохождение сигналов с этих входов на выходы нулевым сигналом с триггера 20. С выхода коммутатора результирующий унитарный код поступает через блок согласования 14 на привод, осуществляя его перемещение по траектории, изображенной,на Фиг. 2 в виде отрезка А, Ас( + Ъ ). Отрезок имеет угол наклона с тангенсом, равным среднему арифметическому тангенсовуглов наклона отрезков Ас(Т ), А4 и фяИк-) А, которым соответствуют унитарные коды, сформированные интерполяторами 8 и 9.20 Таким образом, интерполирующаятраектория между двумя соседними опорными точками состоит из двух отрезков, при этом дополнительная опорная точка посередине периода интерполяции формируется без услож кения программы.Анализ точности показывает, чтопогрешность интерполяции в предлагаемом устройстве в 4 раза меньше,Между углами, приведенными нафиг. 2, и электрическими сигналами,формируемыми в устройстве, существует взаимно однозначное соответст 5 вие, которое выражается+где Г, Е - частота следования импульсов соответственнов положительном и отрицательном каналах на15 выходе интерполятора 8 ф+1Г , Е - частоты следования импульсов на выходах делителя частоты 11,".+ С й - частоты следования импульсов на выходах делителя частоты 12;к - коэффициент пропорциональности, величина которого определяется це"25 ной падшего разрядакоординаты А.По истечении первой половины цикла сигнал Половина цикла с элемента 19 производит в регистр 5 поЗО первым входам запись действительного значения координаты А;ф+) сдатчика 16, а коммутатор 13 переключается сигналом с триггера 20 врежим разрешения прохождения сигналов на блок согласования с выходов интерполятора 9. На блок согласования 14 за интервал времениТГ + - , Г, поступает унитарныйЬ-40 код разности А. - А(1, +)Интерполятор 8, делители 11 и 12во второй половине цикла не участвуют в формировании управляющегосигнала.45 Траектория движения привода вовторой половине цикла изображенана фиг. 2 в виде отрезка А(с + -),А, ,1108392 9чем в известном. Для достижения такой же точности в известном устройстве необходимо примерно вдвое увеличить число опорных точек, т,е. увеличить вдвое объем программы.Кроме того, в предлагаемом устройстве уменьшаются значения скачков скорости в точках сопряжения линейных участков траектории, чтоприводит при совместной работе сприводом к уменьшению динамическихошибок. Быстродействие предлагаемого устройства равнозначно известному с одним линейным интерполятором,КИПИ Заказ 5862/32 Тираж 842 Подписное у Ве Филиал ППП "Патент, г,Ужгород,.ул.Проектная, 4
СмотретьЗаявка
3476997, 23.07.1982
ГОРЬКОВСКИЙ ИССЛЕДОВАТЕЛЬСКИЙ ФИЗИКО-ТЕХНИЧЕСКИЙ ИНСТИТУТ ПРИ ГОРЬКОВСКОМ ГОСУДАРСТВЕННОМ УНИВЕРСИТЕТЕ ИМ. Н. И. ЛОБАЧЕВСКОГО
МАКАРОВ НИКОЛАЙ НИКОЛАЕВИЧ, ЭЙНГОРИН МИХАИЛ ЯКОВЛЕВИЧ, ПРЕОБРАЖЕНСКИЙ АЛЕКСАНДР ВАСИЛЬЕВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: программного
Опубликовано: 15.08.1984
Код ссылки
<a href="https://patents.su/6-1108392-ustrojjstvo-dlya-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления</a>
Цифровое устройство автоматического определения момента входа, выхода и наличия металла в валках клети прокатного стана

Номер патента: 655443
Опубликовано: 05.04.1979
Авторы: Балев, Григорович, Максимова, Скоробогатько, Сухомлинов
МПК: B21B 38/00
Метки: валках, входа, выхода, клети, металла, момента, наличия, прокатного, стана, цифровое
...месдозы регистр 15 кода напряжения месдозы холостого хода, оперативное запоминающее устройство 16 (ОЗУ).Выходы датчиков 1 и 2 (фиг. 2) через коммутатор 3 подключены к входу аналого-цифрового преобразователя 5, выход которого соединен с информационными входами регистров 10 и 12 кода холостого и текущего значений напряжения датчика тока, регистра 13 текущего значения напряжения месдозы и оперативного запоминающего устройства 16, к разрешающим входам регистров 10 и 12 холостого и текущего значений напряжения датчика тока и на первый вход коммутатора 3 подключен один из выходов генератора 4 тактовых 50 импульсов, а второй его выход подключен ко второму входу коммутатора 3 и к разрешающим входам регистров 13 и 15 холостого и текущего....
Способ диагностирования состояния входов-выходов транзисторно-транзисторных логических устройств

Номер патента: 1735850
Опубликовано: 23.05.1992
Авторы: Анкудинов, Беленький, Шепелев
МПК: G06F 11/00
Метки: входов-выходов, диагностирования, логических, состояния, транзисторно-транзисторных, устройств
...мультиплексор). Пля наглядности следуе показать не толькоразность токов, но и величины самихтоков, протекающих в шине питания и, общей шине объекта диагностирования,5 1735850На первом этапе процесса диагнос - будет тирования, т.е. при отключенных вы- табл. ходах ИС;Е 155 КП 2 исправный обьект иметь реакции, приведенные в1. Таблица 1 Реакции 314 15 1 ка Г, ка 31,а 1 136,0 36,0 0,0 1 1 1 30 4 29 31 Эбе 2 3511 1 е Эбв 2 35 в 11 5 1 1 1,0 1 1 1 .1 1 6 1 1 10 1 1 1 1 1 1 1 7 1 1 1 1. О 1 т1,. ф 8 1 1 11 1 0 1 11 1 30,4 29,3 1,1 91 11 1 1 0 1 11 Э 6,2 35,1 1,1 1 О 1 1 1 1 1 1 1 1 01 1 -"- и и 1 1 .1 1 1 1 1 1 1 0 1 1 и.121Ои 13 1 11 . 1 1 1 1 11 0 -"- -ие Ф П р н и е ч а н и е. 1, - величина тока, протекающего в шине питания,1 ф -...
Способ сверления отверстий с наклонным входом-выходом и устройство для его осуществления

Номер патента: 961863
Опубликовано: 30.09.1982
МПК: B23B 35/00
Метки: входом-выходом, наклонным, отверстий, сверления
...в начальный момент выхода одной режущей кромки до максимальной величины при полном ее выходеи затем уменьшается до нуля по меревыхода второй режущей кромки. Скорости соприкасающихся точек режущейкромки инструмента 1 и опоры 3,служащей для приложения уравновешивающих усилий, равны между собой.В предлагаемом устройстве инструмент 1 направляют по кондукторнойвтулке 4, закрепленной в сборном корпусе 5. С нерабочей режущей кромкойинструмента 1 (фиг. 5) контактируетопора, выполненная в виде упорногокольца б, установленного в проточкедвух роликов 7, посаженных на подшипниках 8 качения в ползушке 9.Ползушка выполнена с возможностьюосуществления возвратно-поступательных перемещений на колонках 10, запрессованных в основании 11, причемна...
Устройство для контроля блоков памяти

Номер патента: 660093
Опубликовано: 30.04.1979
Авторы: Аржеухов, Бондаренко, Калечиц, Ускова
МПК: G11C 29/00
...него, Здесь отмечены разряды кодированных слов, условно искаженные возникшими при записи, хранении или воспроизведении сбоями максимальной кратности,На фиг. 2 д воспроизведенный массивпредставлен в виде, который он принимаетпосле операции повторного разнесения, стеми же параметрами сигналов информационных и сжатия к исходному виду сигналов контрольных разрядов слов.На фиг. 2 е изображен тот же массивпосле выполнения над ним операции декодирования и контроля,Устройство содержит (фиг. 1) буферныйрегистр 1, блок коррекции 2, дополнительный блок растяжения и сжатия слов 3,блок кодирования и декодирования 4, блокуправления 5, блок растяжения и сжатия 6,При этом входы блока 3 подключены квыходам буферного регистра 1. и блокакоррекции 2, а...
Устройство для непрерывного диагностирования однотипных логических блоков

Номер патента: 1234840
Опубликовано: 30.05.1986
МПК: G06F 11/26
Метки: блоков, диагностирования, логических, непрерывного, однотипных
...вход-го счетчика 9, в результате чего производится сброс-го счетчика 9. Кроме того-й переключатель 7 осуществляет перестроение всехсхем сравнения из и -входовых в (И)- входовые схемы, что необходимо в случае продолжения работы устройства без 1 -го блока 1 , или при диагностировании группы логических блоков меньшей, чем и . После этого оператор запускает генератор 3 тактовых импульсов, и диагностирование оставшихся и - 1 логических блоков продолжается. Параллельно оператор извлекает логический блок, в котором обнаружен дефект, и на его места устанав3 1234 ливают другой блок. Подключение этого нового блока осуществляется переключением-го переключателя 7 в положение, когда положительный потенциал подается на соответствующие...
Предыдущий патент: Пневматический трехпозиционный регулятор
Следующий патент: Устройство для управления станком с выдвижным шпинделем
Случайный патент: Подпятник для турбобуров