Способ механической обработки
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки





Текст
ОП ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоватскнкСоциалистическиеРеспублик и 929332(53)М. Кл. В 23 В 1/00 Раударетевнный комитет ЕаСР ае делен нзвбретенкй н втерыткйДата опубликования описания 23.05.82(71) Зая ХАНИЧЕСКОЙ ОБРАБОТК 54) СПОС-механи" ательно, ельность Изобретение относится к механической обработке материалов с предварительным локальным нагревом зоны обработки для уменьшения механического сопротивления участков материала перед их удалением режущим, например, лезвийным инструментом.Известен способ обработки металлических деталей. Этот способ механической обработки с предварительным разупрочнением срезаемого слоя плазменной дугой включает вращение заготовки, совмещение опорной точки плазменной дуги с поверхностью резания, осуществляемое вручную, с последующим перемещением режущего инструмента и опорной точки плазменной дуги по обрабатываемой заготовке 1 11.Недостатком известного способа является, во-первых, необходимость экспериментального подбора режимов разупрочнения, во-вторых, необходимость постоянной ручной корректиров ки положения опорной точки плазмен" ной дуги на поверхности резания. Витоге исключается возможность автома"тизации процесса плазменноческой обработки и, следоврезко снижается производитэтого процесса.Цель изобретения - повышениепроизводительности процесса плазменно-механической обработки.Поставленная цель достигается ф тем, что согласно способу, измеряютусилия резания непрерывно в процессе обработки, а положение опорнойточки плазменной дуги выбирают в точках наименьших измеренных усилий.Нефиг. 1 приведена схема . иллюст,"рирующая предлагаемый способ обработки на примере ограниченного участкаповерхности резания;на фиг. 2 - устройство для осуществления предлагаемого способа при осуществлении обработки.Режущий инструмент (резец) 1, обрабатывающий деталь 2, движется в9332 а 3 92 направлении 3. Перед резцом установлено разупрочняющее устройство 4, например в виде плазмотрона (или электронной пушки), опорная точка плазменной дуги которого совмещена с поверхностью 5 резания.В процессе обработки опорную точку плазменной дуги от плазмотрона 4 непрерывно перемещают по ширине поверхности 5 резания, например от точки 6 к точке 7, от точки 7 к тачке 8 или от точки 8 к точке 9, т,е. в направлении 3 перемещения поверхности 5 резания, При этом по усилию, воспринимаемому резцом 1, находят положение опорной точки плазменной дуги на поверхности резания и соответственно положение плазмотрона 1 оносительно резца 1, при котором измеренные усилия на резце являются наименьшими. Автоматизация поиска положения опорной тоцки плазменной дуги в зоне наименьших усилий достигается тем, цто пятну нагрева при перемещении по ширине поверхности резания придают дополнительно колебательное движение с амплитудой меньшей ширины поверхности резания (обычно оказывается достаточно обеспечить амплитуду в 0,01-0,5 ширины поверхности резания - этот предел определяется разрешающей способностью измерительной аппаратурой автоматики),Если рассмотреть какие-то условно выбранные промежуточные положенияточки 6, 7, 8 плазменной дуги на поверхностирезания, то колебания этой точки задает относительно указанных положений в направлении к тоцке 9, перпендикулярном направлению 3, резания, с заданной частотой, например по синусоидальному закону. Таким образом, среднее положение пятна нагрева в начальный момент обработки может быть выбрано произвольно. Допустим, цто положение точки б является тем средним положением пятна нагрева, при котором обеспечивается минимальная нагрузка на режущий инструмент, тогда при отклонении пятна нагрева в любую сторону нагрузка на резец увеличивается, а при колебаниях пятна нагрева нагрузка на резец будет колебаться с двойной частотой относительно некоторой средней величины 10. 5 10 15 20 25 30 35 45 Произведение мгновенных значений отклонения пятна нагрева на срезаемом участке материала от среднего положения 6 и отклонения мгновенного значения нагрузки на резец от средней величины 10 будет представлять собой сумму колебаний однократной и тройной частоты относительно нулевого уровня 11. Средняя по времени величина произведения при этом равна нулю,При отклонении среднего положения пятна нагрева в какую-либо сторону точек 6 или 8 нагрузка на резец будут уменьшаться при приближении пятна нагрева к положению 7, при этом колебания нагрузки на резец при отклонении в разные стороны имеют противоположные фазы, а частоты этих колебаний совпадают с частотой колебаний пятна нагрева, Произведения мгновенных значений отклонения нагрузки от средней величины 12 (13) при отклонении среднего положения пятна нагрева в сторону 6 (8) и мгновенные значения отклонения места нагрева на срезаемом участке материала представляют собой 1 ч (15) сумму колебаний двойной частоты и постоянной составляющей, знак которой определяется направлением отклонения среднего положения пятна нагрева от положения, соответствующего минимальной нагрузке на резец, т.е. оптимальному режиму резания.Отклонение места нагрева на срезаемом участке может быть рассцитано по измеренным мгновенным значениям отклонения пятна нагрева с учетом временной задержки между моментами нагрева участка материала и его срезанием. Эту задержку легко вычислить по измеренным любым известным методам величинам скорости резания и расстояния между пятном нагрева и резцом в Устройство, реализующее предложенный способприведено на фиг, 2,Резец 1, обрабатывающий деталь 2, движется относительно детали 2 в направлении 3, Плазмотрон 1, установленный на фиксированном расстоянии от резца 1, может перемещаться по направляющему пазу 16 и фиксироваться в выбранном положении, Среднее положение пятна нагрева изменяется с помощью привода 17, а вибратор 18 обеспечивает колебания пятна нагрева5 9293 относительно среднего положения. Кроме того, на обратной стороне резца установленприкреплен) тензодатчик 19. Также установлен датчик 20 скорости резания например тахогенера тор, вырабатывающий сигнал, пропорциональный величине скорости резания. Сигнал, пропорциональный скорости резания, с. датчика 20 подается на блок 21 определения времени задержки 10 осуществляющий операцию деления введенного вручную с устройства 22 ввода постоянного сигнала, пропорционального расстоянию между пятном нагрева и резцом, на сигнал скорости 15 ". датчика 20. Сигнал, пропорциональ ный времени задержки, подается с блока 21 на блок 23, осуществляющий задержку сигнала, пропорционального смещению пятна нагрева. Этот сигнал 26 поступает с блока генератора 21, одновременно управляющего вибратором плазмотрона 18. Блок 23 задержки может быть выполнен по любой известной схеме, например с записью на кольцо 25 магнитной ленты, скорость движения которой регулируется сигналом с блока 21, или с записью в оперативное запоминающее устройство, считывание с которой производится через зо время, заданное с блока 21.Задержанный сигнал, характеризующий мгновенное значение отклонения места нагрева на срезаемом в данный момент участке материала, умножаетс З 5 на сигнал мгновенного значения отклонения нагрузки на резец от средней величины, поступающий с тензо" датчика 19, в блоке 25 умножения.выхода блока 25 умножения через 4 о 32фильтр низких частот и усилитель26 сигнал подается на привод 17,поворачивающий плазмотрон 1 такимобразом, что среднее положение пят"на нагрева сдвигается в положение,соответствующее минимуму абсолютнойвеличины, усредненного по временифильтром 26 произведения,Технико-экономические преимуществь от использования предложенногоспособа заключаются в повышениипроизводительности процесса обработ.ки за счет оптимизации режима разупрочнения, что особенно важно при,обработке деталей, имеющих упрочненную и неравномерную литую) структуру, неравномерный припуск поковки)Формула изобретенияСпособ механической .обработки,с разупрочнением срезаемого слояплазменной дугой, включающий вращение заготовки, совмещение опорнойточки плазменной дуги с поверхнос"тью резания и последующее перемещение инструмента с опорной точкой ду"ги по обрабатываемой заготовке, о тл и ч а ю щ и й с я тем, что, с целью повышения производительностиобработки, непрерывно измеряют усилия резания в процессе обработки,а положение опорной точки плазменнойдуги выбирают в точках наименьшихизмеренных усилий,Источники информациипринятые во внимание при экспертизе1. Патент Франции И 2125988,кл. В 23 Р 25/ОО, опублик. 1978.929332 Составитель И.АгабабовС,Патрушева Техред Т.Иаточка Корректор А.Грицен едак ое по де113035) Моска ЮтщУжгород, ул. Проектная, 4 иал РПП "Патент акаэ 3369/16ВНИИ Тираж осударств ам иэобре 1151 нног ений ушск омитетоткрытнаб.,ь в ПодпиСССРй
СмотретьЗаявка
2862672, 03.01.1980
ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "НЕВСКИЙ ЗАВОД" ИМ. В. И. ЛЕНИНА
ИВАНОВ ВАЛЕРИЙ ВАСИЛЬЕВИЧ, ТИХОМИРОВ ЮРИЙ ПАВЛОВИЧ, ГУЛЫЙ СЕРГЕЙ АЛЕКСАНДРОВИЧ, ШИТОВ ИГОРЬ КОНСТАНТИНОВИЧ
МПК / Метки
МПК: B23B 1/00
Метки: механической
Опубликовано: 23.05.1982
Код ссылки
<a href="https://patents.su/5-929332-sposob-mekhanicheskojj-obrabotki.html" target="_blank" rel="follow" title="База патентов СССР">Способ механической обработки</a>
Устройство для фиксации временного положения сигнала

Номер патента: 1307441
Опубликовано: 30.04.1987
Автор: Лопатин
МПК: G04F 10/04
Метки: временного, положения, сигнала, фиксации
...С, (Фиг. 2), когда анализируемый сигнал практически отсутствует, триггер 9 переключается некоторое время по случайному закону поц действием шумов до тех пор, пока в регистре 7 не установится код максимального значения шума на интервале от начального сброса до момента С.При появлении первой полуволнысигнала в момент С, триггер 9 также устанавливается в "1", а в моментСпереключается в О, До появления второй полуволны сигнала код в регистре 7 не достигает заданного значения порога и на выходе дискриминатора уровня 8 (представляющего собой в простейшем случае схему ИЛИ, подключенную к старшим разрядам регистра 7) сохраняется "О", запрещающий прохождение импульсов с генератора 43 13074 через элемент И 10. В момент С код в регистре 7...
Устройство для определения временного положения сигнала

Номер патента: 1307442
Опубликовано: 30.04.1987
Автор: Лопатин
МПК: G04F 10/04
Метки: временного, положения, сигнала
...1 черезпервый элемент И-НЕ 8 начинают поступать с первого выхода генератора 6сигналы высокой частоты, по которым 5производится ускоренное считываниеиэ блока 4 памяти в обратном порядке,Поскольку в регистре 15 хранитсякод амплитуды первой полуволны сигнала и этот код был ранее записан в 1 Облок 4 памяти, при считывании информации наступает момент выборки изблока 4 памяти указанного кода, приэтом на выходе "Равно компаратора10 вырабатывается сигнал, поступающий на единичный вход первого триггера 11, условие установки которогов единичное состояние в рассматриваемый момент выполняется, так как навходе разрешения установки действует 20сигнал логической единицы с прямоговыхода третьего триггера 5, а на входсброса К поступает логический...
Способ определения временного положения сигнала и устройство для его осуществления

Номер патента: 1594696
Опубликовано: 23.09.1990
МПК: H03M 1/54
Метки: временного, положения, сигнала
...3начинается заряд накопительной емкос"ти элемента 7 током 1генератора6 эталонного тока до момента включения выходным импульсом дискриминатора 2 генератора 5 эталонного тока,С этого момента заряд емкости элемента 7 осуществляется током, значениекоторого определяется разностью токов генераторов 6 и 5 1- 1 (Фиг,2диаграмма 14(Б). Данная йроцедура, всвою очередь, продолжается до выключения генератора 5 задержанным налвремя ь сигналом с выхода дискримилнатора 3, Величиназадается элементом 4 задержки и выбирается из расчета, чтобы первоначальный заряд интервал А) и дополнительный заряд (интервал В) накопительной емкости быличетко разделены процедурой дозаряда(интервал Б), В противном случае небудет компенсации погрешности определения...
Устройство формирования сигнала положения системы позиционирования
Номер патента: 1314382
Опубликовано: 30.05.1987
Авторы: Кривецков, Мерзляков, Столяров, Стукалов
МПК: G11B 21/04
Метки: позиционирования, положения, сигнала, системы, формирования
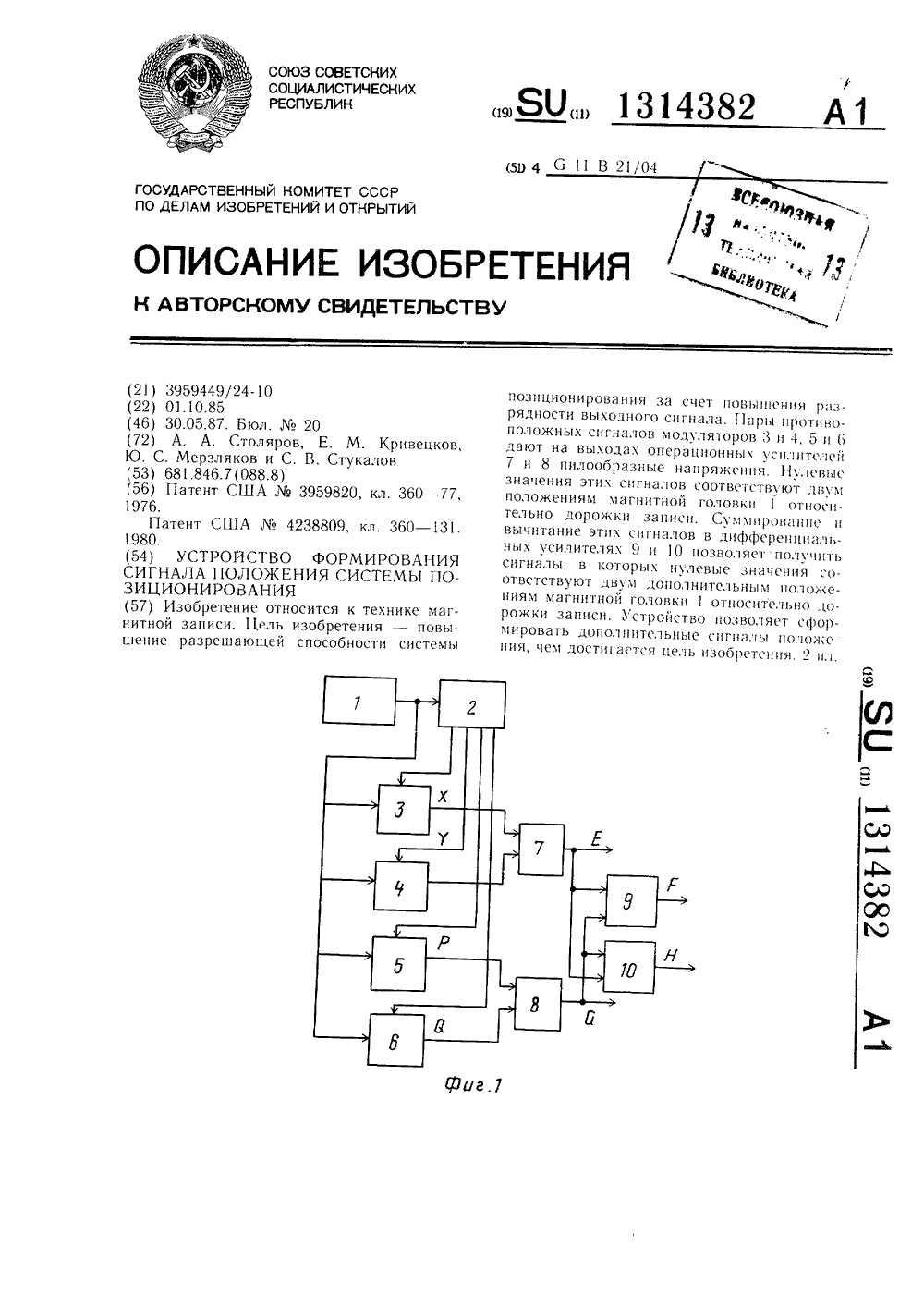
...разредающей способности системы позициониро 5 вания за счет повышения разрядности сформированного сигнала.На фиг. 1 показана функциональная схема устройства; на фиг. 2 -- временная диаграмма выходных сигналов при переме шенин магнитной головки вдоль радиуса дискового магнитного носителя.Устройство содержит магнитную головку 1, генератор 2 стробирующих импульсов, демодуляторы 3 - 6, операционные усинлители 7 и 8, суммирующии и вычитаю 15 гций дифференциальные усилители 9 и 10 соответственно.Устройство работает следующим образом.Магнитная головка 1 имеет длину рабочего зазора, равную ширине двух дорожек на которых записаны четыре типа фазомодулироваццых сигналов. Поэтому сигнал, воспроизведенный магнитной головкой 1, демоду...
Способ механической обработки с подогревом зоны резания плазменной дугой

Номер патента: 872035
Опубликовано: 15.10.1981
Авторы: Кравченко, Поляков, Розенберг, Руденко
МПК: B23B 1/00
Метки: дугой, зоны, механической, плазменной, подогревом, резания
...воэможность сваривания стружек вследствие их усадки. Это условие выполняется в пределе в том случае, если диагональ наносимой канавкирасположена по образующей поверхностирезания, В этом случае угол с 1, междуканавкой 1 и обраэуюшей поверхности резания оцпеделяется из выраженияс Ф Фгс 1 ФО 1 сюй - )%- где Й - ширина стружкоразделительнойканавки;- ее длина;- ширина поверхности резания (длина образующей поверхности резания).Эти выражения равны, если канавкананосится по всей ширине поверхностирезания от обрабатываемой до обработанной поверхности. Так как технологическая ширина поверхности резания не превышает 15 мм, а ширина канавки, наносимой плазменной дугой не меньше 3 -4 мм, то угол д, получается равным 15.Следовательно, для...
Предыдущий патент: Способ интенсификации процесса резания
Следующий патент: Способ бескопирной обработки профильных поверхностей
Случайный патент: Буртоукладчик корнеплодов и мелкоштучных материалов