Устройство для группового ориентирования и сборки
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 891314
Авторы: Гавриш, Двойных, Ямпольский





Текст
Союз СоветскихСоцреалистическихРеспублик ОП ИСАЙИ Е ИЗОБРЕТЕНИЯ к автоскомю свидиии стаю и 891314(23) ПриоритетОпубликовано 23,12,81,твллетень М 47Дата опубликования описания 23,12.81,(5)М, Кл. В 23 Р 19/06 Ьеударстеенньй квинтет СССР ее аелеи иэабеетеннЯ и етнрцткЯ(54) УСТРОЙСТВО ДЛЯ ГРУППОВОГО ОРИЕНТИРОВАНИЯИ СБОРКИ Изобретение относится к средствамавтоматизации технологических процессовв машиностроении, приборостроении и может быть использовано при автоматической сборке сложных узлов и наборки прессформ ,.Известно устройство для групповойсборки деталей, содержащее смонтированные на основании вибратор, загрузочноеустройство, сборочную и ориентирующиеплатформы 11,Недостатком известного устройстваявляется низкая производительность.Бель изобретения повышение производительности.15Поставленная цель достигается тем,что устройство снабжено источником вакуума, а ориентирующие платформы снабжены трафаретами с ячейками и выполнены в виде вакуумных камер, соединенных20посредством каналов с ячейками трафаретов и посредством гибких дополнительновведенных трубопроводов - с источникомвакуума, причем платформы установлены с возможностью поворота относительногоризонтальных осей,Причем ячейки трафаретов ориентируютших платформ выполнены в зеркальномотображении.На фиг, 1 изображено устройство, общий вид", на фиг. 2 - разрез А-А нафиг, 1; на фиг, 3 - разрез Б-Б на фиг, 1на фиг, 4 - разрез В-В на фиг, 1, нафиг, 5 разрез Г-Г на фиг. 4.Устройство состоит из основании 1,на котором расположены привод 2 механизма загрузки мелких деталей, вибратор 3, плита 4, соединенная с основанием 1 плоскими пружинами 5. На верхнейплоскости плиты 4, соединенной со сбор-ным лотком 6, размешены ориентирующие платформы 7 и 8, имеющие возможность вращения в опорах 9 при помощи.механизма псворота (не показан), соединенного с ориентирующими платформами 7и 8 рычагами 10. Кроме того, на верхнейповерхности плиты 4 расположены сборочная платформа 11 и механизм загрузкиз 8913деталей 12, выполненный в виде двух барабанов 13, установленных соосно. Нанижней поверхности плиты 4 закрепленпневмоцнлиндр 14, а в тело плиты 4 установлены электромагниты 15,ВОриентиру юшая платформа 8 выполнена в виде бпоков 16, перемещающихся внаправляющих платформы 8 штангой 17до упора 18 за исключением крайнего левого блока. Каждый из блоков соединен Огибкими воздухопроводами 19 с системойвакуума.Ориентирующая платформа 7, выполнена в виде камеры 20, соединенной с источником вакуума воздухопроводами 19, 15На внешней поверхности платформы 7 установлен трафарет 2 1 с ячейками 22,имеющими конфигурацию подобную детали 1 2, Ячейки 22 трафарета соединеныс вакуумной камерой 20 каналами 23, 20Расположение ячеек 22 трафарета анапо.гично расположению таких же ячеек наблоках 16, при нахождении последних вкрайнем левом положении, Внутренняяполость блоков 16 соединена каналами П23 с ячейками 22 трафаретов 21, закрепленных на их верхних поверхностях. Ячейки 22 трафаретов 2 1 платформ 7 и 8выполнены в зеркальном отражении.Упоры 18 размешены в направляющих зОплатформы 8 так, что ограничивайт перемешение только одного из бпоков 16,не мешая перемешению других, На шланге 17 имеется выступ 24, входящий впрорезь штока 25 при нахождении платформы 8 в горизонтальном положении. Штанга 17 соединена неподвижно скрайним правым блоком 16, а с другимивзаимодействует посредством упоров 2640и 27, расположенных друг к другу подуглом таким образом, чтоб упор 27 про.ходил мимо выступа 28 и входил в контакт с выступом 29,Сборочная ппатформа 11 выполнена в4виде плиты с окнами 30, имеюшими двеориентирующие поверхности 31 и 32 ивертикальный канал 33. Расположениеверхней части окон 30 на поверхностиплатформы 11 соответствует расположению ячеек 22 трафаретов 21, а распопИжение вертикальных канадов 33 соответствует расположению сопрягаемых отверстий базовых деталей 34, установленныхв кассете 35, Кассета 35 установпенас возможностью перемещения в направляю 5ших плиты 4,Два барабана 13 установлены в опорах 36 и 37 и связаны посредством ре 14 4менной передачи с приводом 2. По обраэуюшим барабанов 13 выполнены пазы,перекрываемые заслонкой 38. В опоре 37выполнено сквозное отверстие, соединяющее питатедь 39 со сборным лотком 6,В опорах 36 и 37 закреплены лотки-склизы 40.Устройство работает следующим образом,Включается вибратор 3, колеблющийплатформу 4 с находящимися на ней узлами, Детали 12 (лепестки, штырьки поступают партиями из вращающихся барабанов 13 через щель между корпусом барабана 13 и заслонками 38 на лотокскпиз 40 и далее на трафарет 21 ориентирующих бпоков 16, находяшихся в крайнем левом (сжатом) положении и на трафарет 21 платформы 7, Проходя черезтрафареты 21 детали 12, совмещаясь сячейками 22, остаются в них. Не запавшие детали 12 под действием вибрациинаправпяются в сборник 6, где собираются в нижней его части, соединенной с эжекционным отверстием, всасывающим дета -ли 12, и по канаду, связанному с опорой37 и питателем 39, возвращаются в барабан 13, Для обеспечения надежной передачи вибрации на платформы 7 и 8 последние находятся в контакте с магнитами 15, включенными в период заполнениятрафаретов 21.После заполнения трафаретов 21 отключаются электромагниты 15 и через гибкие трубопроводы 19 в камерах ориен тируюших бдоков 16 и платформы 7 создается вакуум, фиксирующий посредством каналов 23 детали 12 в ячейках 22 трафаретов 21, После чего платформа 7 механизмом поворота через рычаги 10 поворачивается на 180 и накладывается на платформу 8, при этом ячейки 22 ппатформ 7 и 8 совмещаются, В конце поворота отключается вакуум и детали 12 пересыпаются в ячейки 22 трафарета 21 платформы 8, располагаясь в ячейках 22, если они не заняты или над деталями 12, если ячейки 22. платформа 8 заняты. Посце пересыпки платформы 7 возвращается в исходное положение. Блоки 16 платформы 8 под действием пневмоцилиндра 14, перемещающего шток 25 и штангу 17, взаимодействующую посредством упоров 26 и 27 с выступами 28 и 29, раздвинутся на расстояние , ограничивающееся упорами 18, после чего производится поворот платформы 8. При повороте платформы 8 детали 12, не запавшие в ячейки 22,ссыпаются, а после окончания поворота отключается вакуум и детали 12 .попадают на ориентирующие поверхности 31 и 32, где они разворачиваясь в двух плос. костях, попадают в канал 33, располо женный над сопрягаемыми отверстиями базовых деталей 34, установленных перед поворотом в кассеты 35 под сбо - рочной платформой 11, Канапы 33 выполнены таким образом, что плошадь его го ризонтального сечения перекрывает отверстие базовой детали и погрешность базирования, поэтому под действием приложенной вибрации деталь 12 совершает сложное поисковое движение в канале до тех 15 пор, пока не совместится с отверстием базовой детали 32, Таким образом происходит сборка со всеми деталями, попавшими в окна 30 сборочной платформы 11, ЙПосле пересыпки платформЕ 8 возврашается в исходное положение, кассета 35 вынимается из-под сборочной ппатформы 11, собранные узлы удаляются, а2 вместо них загружаются базовые детали 34. аикц ориентирования и сборки группы деталей окончен,В зависимости от типа базовых де- М талей процесс подачи их под сборочную платформу может быть легко автомащзирован, Управление работой узлов устройства производится от командоаппарата 41, который может иметь самый раз- у личный принцип работы и структуры. Применение предпагаелого устройства позволяет, по сравнению с известными устройствами, производить сборку более сложных узпов, а также сборку узпов, базовые детапи которых имеют большие габаритные размеры, Предпагаемое устройство за счет поворотных платформ, обеспечивающих быстрое удаление не запавших детапей, и равномерной дозированной загрузкой трафаретов, сокращает время цикла, что увеличивает производитель ность.формула изобретенияУстройство дпя группового ориентирования и сборки деталей, содержащее смонтированные на основании вибратор, загрузочное устройство, сборочную и ориентирующие платформы, о т л и ч а ю ш е ес я тем, что, с цепью повышения производитепьности, оно снабжено источником вакуума, а ориентируюпие платформы снабжены трафаретами с ячейками и выполнены в виде вакуумных камер, соединенных посредством канацов с ячейками трафаретов и посредством гибких дополнительно введенных трубопроводов - с источником вакуума, причем платформы установпены с возможностью поворота относитепьно горизонтальных осей.Источники информации,принятые во внимание прн экспертизе1, Авторское свидетельство СССР % 751564, кл. В 23 Р 19/04, 1978.Тираж 1151 Посударственного комитетаам изобретений н открытийосква, Ж, Раушская на одписноеСССР д, 4/ филиал ППП "Патент, г, Ужгород, ул. Проектная,
СмотретьЗаявка
2919738, 08.05.1980
заявителя
ГАВРИШ АНАТОЛИЙ ПАВЛОВИЧ, ДВОЙНЫХ НИКОЛАЙ АЛЕКСАНДРОВИЧ, ЯМПОЛЬСКИЙ ЛЕОНИД СТЕФАНОВИЧ
МПК / Метки
МПК: B23P 19/06
Метки: группового, ориентирования, сборки
Опубликовано: 23.12.1981
Код ссылки
<a href="https://patents.su/5-891314-ustrojjstvo-dlya-gruppovogo-orientirovaniya-i-sborki.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для группового ориентирования и сборки</a>
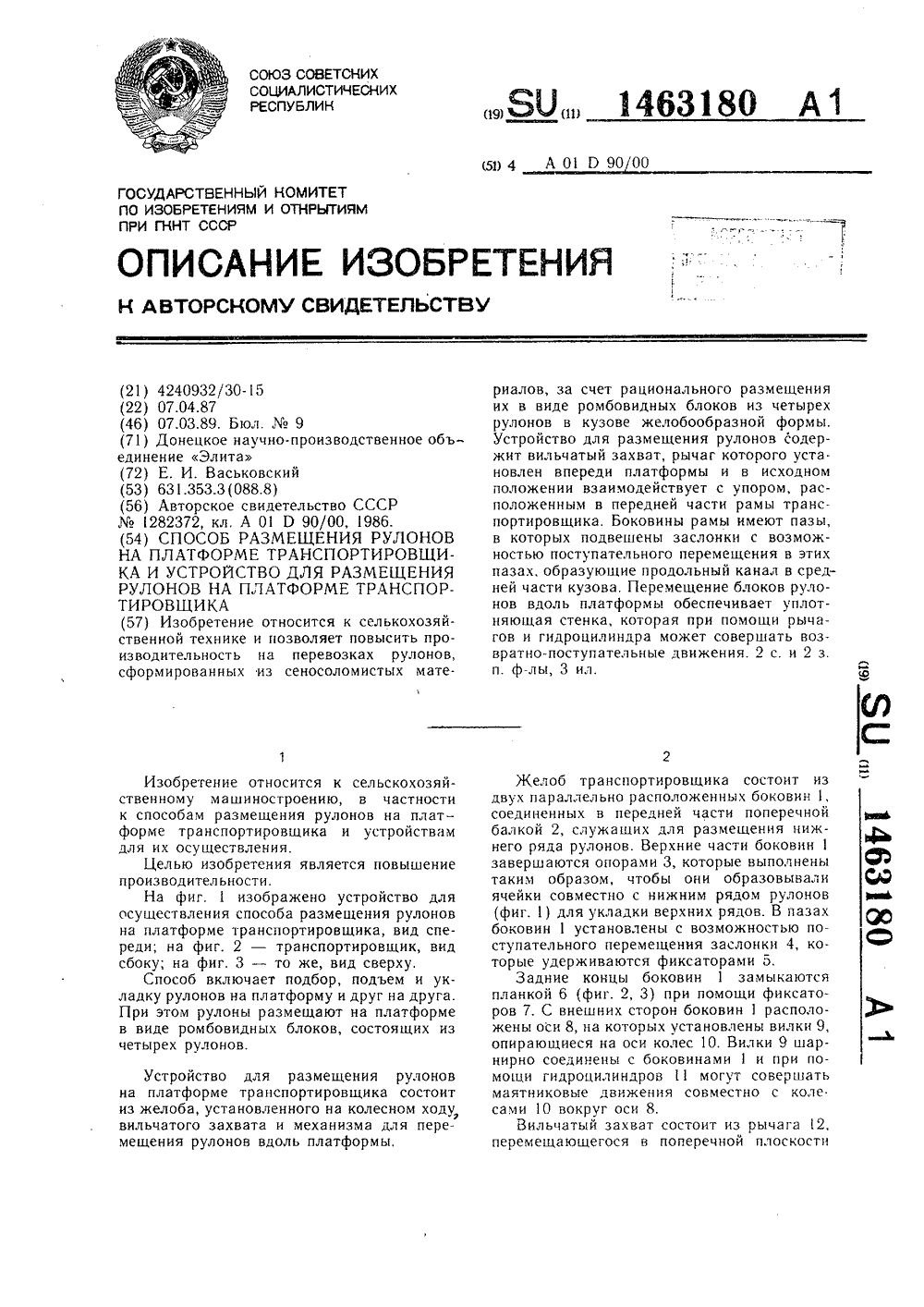
Способ размещения рулонов на платформе транспортировщика и устройство для размещения рулонов на платформе транспортировщика
Номер патента: 1463180
Опубликовано: 07.03.1989
Автор: Васьковский
МПК: A01D 90/00
Метки: платформе, размещения, рулонов, транспортировщика
...10 15 рех рулонов перемешают в заднюю часть кузова при помощи уплотняющей стенки 17, которая приводится с помощью гидроцилиндра 21 и рычажной системы (фиг. 2).Перемещение блока вдоль платформы осуществляют на шаг, равный длине рулона. Возвращают уплотняющую стенку 17 в исходное положение и формирование следующего блока из четырех рулонов осуществляют в изложенной ранее последовательности. Процесс повторяют до полного и плотного заполнения кузова транспортировщика, огра 50 Устройство работает в агрегате с трактором 22 и шарнирно подсоединено к задней тяге 23 трактора 22 фиксатором 24. Тяга 23 может совершать движения по вертикали при помощи гидропривода, установленного на тракторе 22 (не показано).20Устройство для размещения рулонов на...
Способ получения соединения детали со стержнем

Номер патента: 1812345
Опубликовано: 30.04.1993
Авторы: Козий, Рассказов, Таран, Шилкина
МПК: B21J 15/02, F16B 4/00
Метки: детали, соединения, стержнем
...стержне 2. Из последнегоусловия и определяется глубина глухой полости в детали:0,58 - Я( г 4 Я 2 2 Таким образом, на завершающей стадии пластического сжатия материала детали нэ контактируемых поверхностях цилиндрического стержня с деталью будут имеет место контактные давления, что и обеспечит повы-.шение надежности и качество крепления.Степень же заполнения свободного объема кольцевой канавки легко контролируется,Затем производят упрочнение материала цилиндрического стержня по местоположению кольцевой канавки.Для этого в отверстие втулочного пуансона 3 устанавливают цилиндрический пуансон б,Воздействуя импульсным усилием Ртна торец цилиндрического пуансона 6 обеспечивают его перемещение в направлении детали 1 (фиг. 3), В...
Регулируемое соединение охватываемой детали с охватывающей иванова ю. в.

Номер патента: 1761988
Опубликовано: 15.09.1992
Автор: Иванов
МПК: F16B 2/18
Метки: детали, иванова, охватываемой, охватывающей, регулируемое, соединение
...выступ выполнен в виде кривошипного пальца жестко закрепленного на торцевой поверхности большей ступени стопорного элемента, втулка с наружной резьбой выполнена с концентричным отверстием, шайба размещена между взаимообращенными торцевыми поверхностями упомянутой втулки и большей ступени стопорного элемента в контакте с указанными поверхностями, а резьба в радиальном отверстии охвэтываемой детали выполнена на участке его поверхности со стороны противоположной охвэтываемой детали. Радиальное отверстие может выполняться и со сплошной резьбовой внутренней поверхностью,Предлагаемое техническое решение позволит применять одну направляющую.На фиг, 1 изображено предлагаемое соединение, разрез; на фиг, 2 - то же, соеди 5 10 15 20 25 л 0...
Устройство для завинчивания гаек

Номер патента: 1648743
Опубликовано: 15.05.1991
Авторы: Голованов, Житников, Кузьмин
МПК: B23P 19/06, B25B 21/00
Метки: гаек, завинчивания
...относительно осей шпилек 22. Гайки входят в цилиндрический поясок насадки 5, ориентирующий гайки при ихнаживлении на шпильки 22 в начальный момент вращения гайковертом, а затем гайки другу образуют гнездо под шайбу и гайки и нижнюю часть насадки 5, а также канал для подачи гаек и шайб, Для удержания ползунов 13 на направляющих 12 к ним снизу крепятся планки 14, имеющие полуотверстия, которые в прижатом положении образуют отверстия несколько большие, чем резьбовое отверстие, Плита 11 имеет ориентирующие упоры 15. Губки ползуна 13 прижимаются друг к другу пружинами 16, скрепленными на стержнях 17, ориентируясь по центру квадратного паза плиты 11 напротив насадки 5, упираясь в трубки 18, подающие шайбы и гайки, Трубки 18 имеют...
Способ соединения деталей обуви растворными клеями

Номер патента: 2004175
Опубликовано: 15.12.1993
Автор: Бескоровайный
МПК: A43D 25/20
Метки: клеями, обуви, растворными, соединения
...жидкость должна обеспечивать смачиваемость поверхности субстрата. В результате первого нанесения клея с пониженной вязкостью обеспечивается лучшая смачиваемость субстрата и более полный 5 контакт адгезива и субстрата, а также образование клеевого слоя (пленки). Сразу же после первого нанесения клея деталь размещают клеевой пленкой вверх на жесткой опоре. Затем вдавливают часть адгезива че реэ поры во внутреннюю структуру детали с помощью удара по клеевому слою охлаж денной профилированной поверхностью ударника, Раствор клея в начальный момент под действием усилия со стороны ударника 15 перераспределяется и заполняет впадины на профилированной поверхности ударника, За счет того, что поверхность ударника охлаждена, клей ее не...
Предыдущий патент: Устройство для сборки деталей
Следующий патент: Станок для сборки поворотных кругов
Случайный патент: Способ получения соединений диазония