Система автоматического управления технологической линией обогащения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 749430
Авторы: Момот, Моркун, Хорольский

Текст
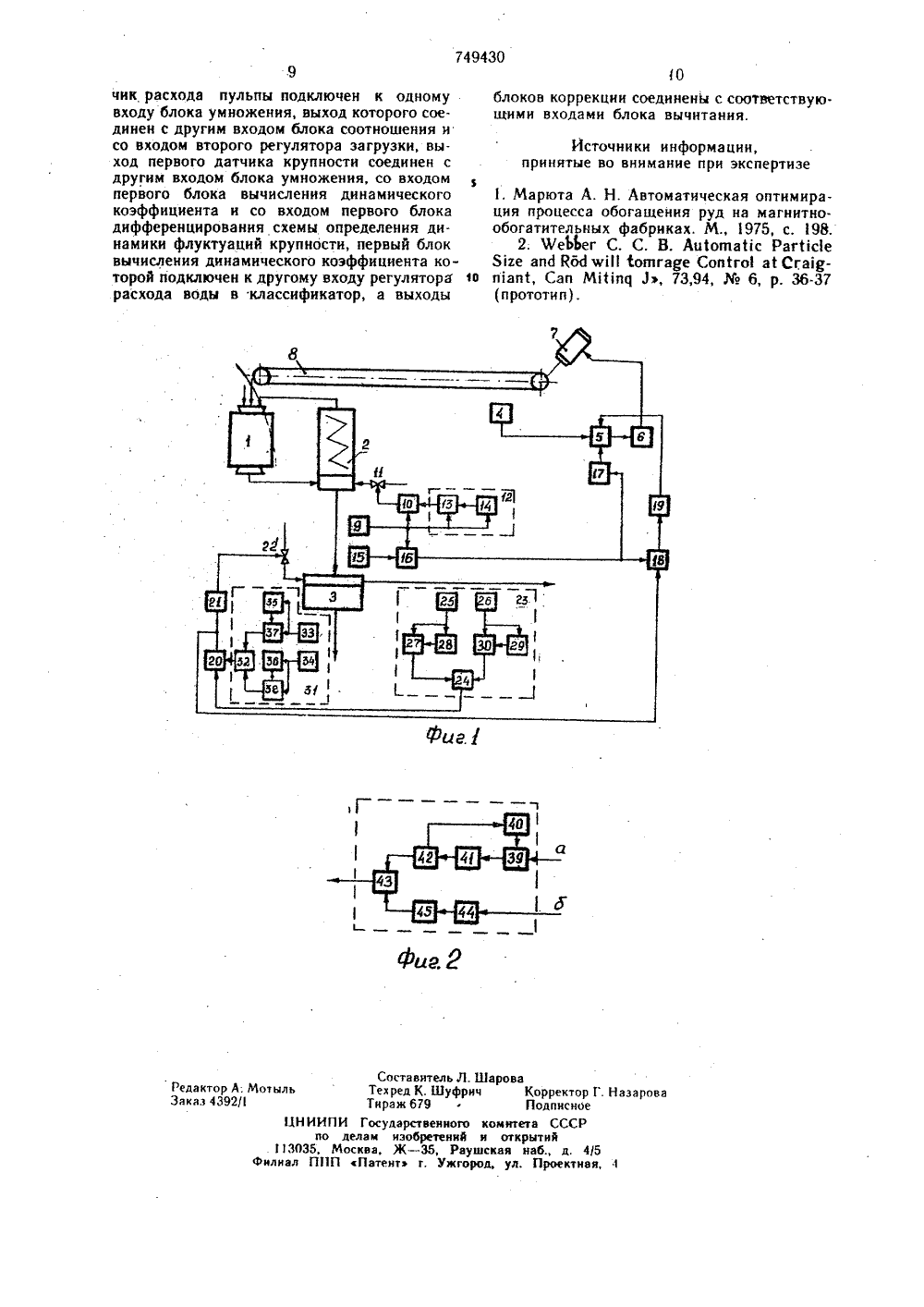
Союз СоветскнхСоцналнстнческнхРеспублнк ОП ИСАНИЕИЗОБРЕТЕН ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ с,749430юллетень27 Опубликовано 25.0.8 лам нзобретени отнрытнй та опубликования описания 28.07.8 2) Авторы изобретен В. С. Моркун, В орольский и В. Е. Момо иворожский орлена Трудового Красного Знамени горнорулный институт(7) Заявитель 54) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВ сЕНИ Т 1.ХНО,ОГИЧЕСКОЛ,ИНИЕЛ ОБОГАЦЕ)ИЯИзобретение относится к автоматическому управленио работой взаимосвязанных измельчительных, классифицирукццих и обогатительных агрегзтсв на обогатительных фабриках в услсвиях изменяющегося. качества исходной руды.Известна система автоматического управления магнитным сепаратором, включающая подсистему регулирования расхода лобавочной воды в ванну сепаратора в зависимости от содержания полезного компонента вхвостах 11Недостатком известной системы является то, что в виду невысокой точности и малой надежности сусцествуюцих датчиков содержания полезного компонента в потоке перерабатываемого сырья имеют место частые отклонения параметров технологического процесса от оптимальных значений и как следствие, бсльнущие потери полезного компонента, малый выход и низкое качество получаемого кониеигрзта.Известна также система автоматического управления технологической линией обогащения, содержания мельницу, работающую в замкнутом пикк с классификатором, обо. гатительиый зиизрзт, датчик конвейерных весов, два регулятора загрузки, преобразователь мощности, гсриволной лвигатель кон.вейер питателя, первыйлатчиккрупности н регулятор расхода волы в классификатор, причем датчик конвейерных весов полключен к олному входу первого регулятора загрузки, лругой вход которого соединен с выходом второго регулятора загрузки, выход первого регулятора загрузки полключен ко входу преобразователя мощности, выход которого подключен к приводному двигателю конвейер-питателя, а первый . датчик крупности соединен с олним вхолом регулятора расхода воды в классификатор 2.Недостаток этой сисгемы заключается втом, что в условиях изменяюисегося характера вкрапленности полезного компонента в исходной руде и стабилизации степени измельчения (гранулометричес кого состава твердого в пульпе на сливе классифициру.ющего аппарата) увеличиваются потери полезного компонента в хвсстах обогатитель.20 ного аппарата за счет иенслного раскрытиярудных зерен либо их иереизмельчения. Использование для коррекции загрузки мельницы рудой косвенного изрзмегрз (уровень пульпы в зумпфе) ух пизет линамическиекачества системы, что сшсждет прснано:и тельность цикла по исходной руле.Цель изобретенияповышение производитеьности лицин.Указни цель достигается тем, со сцс тсмднтоматическосо упрн,ения технологи.чес кой л и ней обос Иге и 5, соле рж цьд я мельницу, рабо 1 юсцую н замкнутом циклс с классифнктором, обогатительныйнндрат датчик конвейерных весов, два регулнгор загрузки, преобразователь моиности, при волной двигатель конвейер-читателя, первый лдтчик крупности и регулятор рдсхол воды в классифгпдтор, причем лдтчик конвейерных весов подключен к одному входу первого регулятора загрузки, лругой вход которого соединен с выходом второго регуля. тора загрузки, ныхоЛ первого регулятора5 загрузки полклкчен ко нходу преобразователя,"мощности, выход которого подклочен к приводному днцгдтело конвейер-ггитдтеля, д первый датчик крупности соединен с одним входом регулятора расхода воды в классификатор, снабжена латчиком расхода пульпы нд сливе классификатора, блоком умножения, схемой определения дицамики флуктуаций крупности твердого в пульпе нд сливе классификатора, состоящей из носледовдтельно соединенных первого блока нычисления динамического коэффициента н первого блока дифференццровдния, блоком соотношения, регулятором соотношения, регулятором расхола нодь в обогатительный аппарат, блоком вычитания и схемами определения Линамнки флуктуаций плотности твердого в продуктах ц хвостах обогатительного аппарата, каждая из которьх состоит из второго и третьео блоков вычисления динамического коэффициепа, блока коррекции, второго и третьего блоков дифференци- з 5 ровация, второго датчика крупности и датчика плотности, который соединен с одним входом второго блока вычисления динамического ксэффициентд и со входом нгорсго слокд дифференцировании, ныхсл коо оси(с полклочен к,ругому нхслу нт рсгс блок гзычцсленця линдлсс сексгс коэффициент, выход которого полканчсц к одпому входу блока коррекции, другой вход которого полключен к выходу третьего блока вычисления линамического коэффициента, один вход ко- и торого подключен к выходу третьего блока дифференцирования, вход которого и другой вход третьего блока вычисления динамического коэффициента подключены ко второму датчику крупности, причем выход блока вычитания подключен к регулятору расхода воды в обогатительный аппарат и к одному входу блока соотношения, выход которого соединен через регулятор соотыошения к соответствующему входу первого регулятора загрузки, датчик рас хода пульпы подключен к одному входу блока умножения, выход которого соединен с другим входом блока соотногцения и со вхо дом второго регулятора загрузки, выход пер всго латчцка крупности соелинен с другим входом блока умножения, со входом первого блок вычисления динамического коэффициента и со вхолом первого блока дифференцирования схемы определения динамики флуктуации крупности, первый блок вычисления лцамического коэффициента которой подключен к другому входу регулятора расхода воды н классификатор, а выходы бло-. ков коррекции соединены с соответствующими входами блока вычитания.11 а фиг. 1 показана блок-схема системы автоматического управления технологической линией обогащения; на фиг. 2 - схема блока вычисления динамического коэффициента.Система содержит мельницу 1, классификатор 2, обогатительный аппарат 3, датчик 4 автоматических конвейерных весов, первый регулятор 5 загрузки мельницы, преобразователь 6 мосццости, приводной двигатель 7, коннейер-питдтель 8, первый датчик 9 крупности (ультразвуковой), регулятор 10 расхода воды в классификатор, клапан 11 н,грубопроноле подачи воды, схему 12 определения лицамической флуктуации крупности твердого в пульпе на сливе классификатора, состоящую из первого блока 13 вычисления динамического коэффициента и первого блока 14 лифференцирования, датчик 15 расхода пульпы, блок 16 умножения, второй регулятор 17 загрузки, блок 18 соотношения, регулятор 19 соотношения 19, блок 20 вычитания, регулятор 21 расхода волы в обогатительный аппарат с клапаном 22, схему 23 определения динамической флуктуации плотности твердого н промпродуктахобогатительного аппарата, состоящую из блока 24 коррекции, датчика 25 плотности, второго датчика 26 крупности, второго блока 27 вычисления. динамического коэффициента, второго и третьего дифференцирующих блоков 28 и 29, третьего блока 30 вычисления динамического коэффициента, схему 31 определения динамики флуктуаций плотности твердого н хвостах обогатительного аппарата, состоящусо из блока 32 коррекции, датчика 33 плотности, второго датчика 34 крупности, второго и третьего дифференцирующих блоков 35 и 36, второго и третьего блоков 37 и 38 вычисления динасического коэффициента, а каждый блок вычисления динамического коэффициента состоит из элемента 39 сравнения, задатчика 40, блока 41 определения модуля сигнала ошибки, фильтра 42, блока 43 деления, блока 44 опреде. ления модуля реальной производной сигнала и фильтра 45. Система автоматического управления работает следующим образом.Регулятор 5 в соответствии с сигналом, поступающим с датчика 4 автоматических конвейерных весов, посредством преобразователя 6 мощности изменяет скорость приводного лвигателя 7 конвейера-питателя 8таким образом, чтобы стабилизировать загрузку мельницы 1 рудой.Регулятор 10 стабилизирует гранулометрический состав твердого иа сливе классификатора 2, управляя по сигналу ультразвукового датчика 9 крупностй положением клапана 11 на трубопроводе подачи воды в классификатор 2.Блок 16 умножения, путем перемножения сигналов с ультразвукового датчика 9 крупности и датчика 15 расхода пульпы на сливе классификатора 2 вычисляет расход контролируемого (готового) класса на сливе классификатора 2, по которому экстремальный регулятор 17 максимизирует загрузку мельницы 1 рудой, управляя корректором задания регулятора 5.Ультразвуковой датчик 9 крупности (а также 26, 34) опрелеляет содержание контролируемого класса крупности по эффективной площади сечения гранул твердого в пульпе, Чем меньше величина полезного компонента (мельче вкрапленность), тем ближе к сфере форма гранулы измельченной руды контролируемого класса крупности. Крупновкрапленная руда характеризуется ярко выраженной несимметричностью гранул. При попадании их в плоскость контроля меняется дисперсия и резко увеличивается скорость изменения сигнала на выходе датчика 9 крупности. Таким образом, вкраплен- ность полезного компонента опрелеляет динамические свойства твердого в пульпе.Для определения характера вкрапленности полезного компонента сигнал с ультразвукового датчика 9 крупности подается на элемент 39 сравнения (первый вход блока 13 вычисления динамического коэффициента схемы 12 определения динамики флуктуаций крупности твердого в пульпе на сливе классификатора 2), где сравнивается с базовым значением, устанавливаемым задатчиком 40.Сигнал ошибки, т.е. разность между текущим и базовым значениями содержания контролируемого класса крупности твердого в пульпе, поступает на схему 41 определения модуля сигнала ошибки. фильтр 42 за выоранные промежутки времени (время интегрирования) оценивает Е - максимальное значение модуля сигнала ошибки.Одновременно сигнал с ультразвукового датчика 9 крупности поступает на вход блока 14 дифференцирования. Производная сигнала по времени подается на блок 44 определения модуля реальной произволиой сигнала ошибки (второй вход блока вычисления динамического коэффициента).Фильт 45 за вцбранные промежутки времени оценивает хмаксимальное значение модуля реальной произволной сигнала ошибки. ьл3: и х подаются на блок 43 деления, которая осуществляет вычисление отношениялЯкПосле завершения цикла вычисления максимальное значение модуля сигнала ошибкиЯ поступает на залатчик, 40, который в следующий цикл контроля подает это значениена элемент 39 сравнения в качестве базовойвеличиньь10 Величина 8 характеризует динамическиесвойства твердого в пульпе, определяемыевкрапленностью полезного компонента и используется для коррекции гранулометрического состава слива классификатора 2 путемизменения залания регулятора 10. Измельченная в зависимости от характера вкрапленности полезного компонента руда поступаетна обогатительный аппарат 3.Качество работы обогатительного аппа.рата 3 определяется однородностью получае 2 о мых промпродуктов (максимальное извлечение полезного компонента) и хвостов (минимальные потери полезного компонента. Увеличение неоднородности одного из продуктовобогащения указывает на ухудшение качест.2ва разделения пустой породы и полезногокомпонента. Оценка одноролности осуществляется путем определения динамики флуктуаций плотности твердого в промпролуктахи хвостах обогатительного аппарата 3.Контроль плотности тверлого в промпрозО дуктах осуществляется ралиоактивным датчиком 25 плотности. Блок 27 вычисления динамического коэффициента 27 с блоком 28дифференцирования осуществляют вычисление отношения лЯ35тлгде Я - максимальное значение модуля сигнала ошибки (при измерении плот.ности тверлого в пром продуктах);Хн - максимальное значение модуля ре 40 альной произволной сигнала ошибки (при измерении плотности твердого в промпролуктах).Однако величина х, зависит также отхарактера поверхности рудных зерен.Блок 30 вычисления динамического коэффициента с блоком 29 дифференцированияпо сигналу ультразвукового датчика 26 крупности осуществляют вычисление корректирующего параметра-лннамики флуктуацийкрупности твердого0е= ",Л,глеЕ - максимальное значение модуля сигнала ошибки (при измерении крулл, ности твердого в промпродуктах);г - максимальное значение модуля реальной производной сигнала ошибки (при измерении крупности твер.дого в промпролуктах).формула изобретения С выхода блока 24 коррекции цд олин из входов блока 20 вычитания подается вео ф "1 м игде Кх - масштабный коэффициент.Контроль плотности тверлого в хвостах осу 1 цествляется радиоактивным датчиком 33 плотности. Блок 37 вычисления лцнамичес. кого коэффициента с блоком 35 дифференцирования осуществляют вычисление отцошециялЕххлгде Я максимальное значение модуля сигнала ошибки (при измерении плотности твердого в хвостах);Хмаксимальное значение модуля реальной производной сигнала ошибки (при измерении плотности твердого в хвостах).Блок 38 вычисления динамического коэффициента с блоком 36 дифференцирования по сигналу ультразвукового датчика 34 крупности осуществляют вычисление корректирующего параметра - динамики флуктуаций крупности твердогохфЛ, хглеб - максимальное значение модуля сигхнала ошибки (при измерении крупности твердого в хвостах);Х - максимальное значение модуля реальной производной сигнала ошибки (при измерении крупности твердого в хвостах).На схему 20 вычитания с выхода блока 32 коррекции подастся величинаЯЯх-м 6 хСхема 20 вычитания вычисляет разностьгп= с - ),Экстремальный регулятор 2) изменяет расход воды в обогатительный аппарат 3 таким образом, чтобы минимизировать мо. дуль величины гп и тем самым максимизировать качество обогащения. Величина гп подается также на блок 18 соотношения, которая определяет отношение количества поступившей на обогащение руды к качеству получаемого концентрата (отношение расхода готового класса на сливе классификатора к модулю величины, характеризующей однородность продуктов обогащения).Регулятор 19 соотношения, подключенный к инвертирующему входу корректора задания регулятора 5, ограничивает максимум производительности линии по исходной руде, задаваемый экстремальным регулятором ) 7 при ухудшении заланного качест ва концентрата. Таким образом, система определяет и поддерживает максимально возможную производительность линии по исхолцой руде при заданном качестве концентрата вце зд 1 о 1 т о 5 зо и 40 зо Виси мости 01 кдчес Гвд цеГраб)атываемогосырья. Система автоматического управления технологической линией обогащения, содержащая мельницу, работающую в замкнутом цикле с классификатором, обогатительный аппарат, датчик конвейерных весов, лва регулятора загрузки, преобразователь мощности, приводной двигатель конвейер-питателя, первый латчик крупности и регулятор расхода воль в классификатор, причем дат. чик конвейерных весов полключен к одному входу первого регулятора загрузки, другой вход которого соединен с выходом второго регулятора загрузки, выход первого регулятора загрузки подключен ко входу преобразователя мощности, выход которого полключец к приводному двигателю конвейер-пита. теля, а первый датчик крупности соединен с одним входом регулятора расхода воды в классификатор, отлицавщаяся тем, что, с целью повышения производительности линии, она снабжена датчиком расхода пульпы ца сливе классификатора, блоком умножения, схемой определения динамики флуктуаций крупности твердого в пульпе на сливе классификатора, состоягцей из последовательно соединенных первого блока вычисления динамического коэффициента и первого блока дифференцирования, блоком соотношения, регулятором соотношения, регулятором расхода воды в обогатительный аппарат, блоком вычитания и схемами определения динамики флуктуаций плотности твердого в продуктах и хвостах обогатительного аппарата, каждая из которых состоит из второго и . третьего блоков вычисления динамического коэффициента, блока коррекции, второго и третьего блоков дифференцирования, второго датчика крупности и лат- н чика плотности, которыи соединен с одним входом второго блока вычисления динамического коэффициента и со входом второго блока дифференцирования, выход которого подключен к другому вхолу второго блока вычисления динамического коэффициента, выход которого подключен к одному входу блока коррекции, лругой вхол которого подключен к выходу третьего блока вычисления динамического коэффициента, один вхол которого подключен к выходу третьего блока дифференцирования. вхол которого и другой вход третьего блока вычисления динамического коэффициента подклгочены ко второму датчику крупности, причем выхол бло. ка вычитания подключен к регулятору расхода воды в обогатительный аппарат и к одному входу блока соотношения, вы. ход которого соединен через регуля тор соотношения к сигие) .твую 1 це му входу первого рег уляторд :ру зки. Назарова роваКорректорПодписноемнтета СССРоткрытийкая наб., д. 4/ул. Проектиа Составит ь Тех ред К. Тираж 679 ЦНИИПИ Государств по делам иэобре 113035, Москва, Ж -лиал ППП Патент г.Редактор А: МотылЗаказ 4392/1 еиного котений н35, РаушсУжгород чик расхода пульпы подключен к одному входу блока умножения, выход которого соединен с другим входом блока соотношения и со входом второго регулятора загрузки, выход первого датчика крупности соединен с другим входом блока умножения, со входом первого блока вычисления динамического коэффициента и со входом первого блока дифференцирования схемы определения динамики флуктуаций крупности, первый блок вычисления динамического коэффициента которой подключен к другому входу регулятора 40 расхода воды в классификатор, а выходы блоков коррекции соединены с соответствую.щими входами блока вычитания. Источники информации,принятые во внимание при экспертизе1. Марюта А. Н. Автоматическая оптимирация процесса обогащения руд на магнитнообогатнтельных фабриках. М., 975, с. 198.2. Фейег С, С. В, Ац 1 ота 11 с Рагбс 1 е чае апд Коде 1 1 оп 1 гаде Соп 1 го а 1 Сгащ п 1 ап 1, Сап М 11 ищ,1, 3,94,6, р. 36-3 (прототип).
СмотретьЗаявка
2582187, 21.02.1978
КРИВОРОЖСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ГОРНОРУДНЫЙ ИНСТИТУТ
МОРКУН ВЛАДИМИР СТАНИСЛАВОВИЧ, ХОРОЛЬСКИЙ ВАЛЕНТИН ПЕТРОВИЧ, МОМОТ ВЕРА ЕФИМОВНА
МПК / Метки
МПК: B02C 25/00
Метки: линией, обогащения, технологической
Опубликовано: 23.07.1980
Код ссылки
<a href="https://patents.su/5-749430-sistema-avtomaticheskogo-upravleniya-tekhnologicheskojj-liniejj-obogashheniya.html" target="_blank" rel="follow" title="База патентов СССР">Система автоматического управления технологической линией обогащения</a>
Устройство для вычисления коэффициентов фурье

Номер патента: 894718
Опубликовано: 30.12.1981
Авторы: Генкин, Голубев, Куно, Скворцов, Шагурин, Щетинин
МПК: G06F 17/14
Метки: вычисления, коэффициентов, фурье
...формирование импульсов с постоянной частотой,Дляполучения требуемой частоты импульсов, связанной с частотой исследуе мой гармоники входного сигнала, импульсы с выхода генератора 8 пропускают через управляемый делитель 9, на управляющие входы которого подается код, характеризующий частоту исследуемой гармоники, Для перестройки устройства на другую частоту код, задаваемый на входы 1 Ч, может изменяться. Импульсы с выхода делителя 9; имеющие цастоту, в постоянное число раз превышающую заданную частоту исследуемой гармонической составляющей,. поступают на входы блока 3 управления и узла 10, формирующего опорные сигналы,в качестве которого для данного конкретного случая можно использовать двухразрядный распределитель,на выходах которого...
Устройство для вычисления коэффициентов полинома

Номер патента: 960835
Опубликовано: 23.09.1982
Авторы: Калашников, Поляков, Реут, Тихомиров
МПК: G06F 17/10, G06F 7/544
Метки: вычисления, коэффициентов, полинома
...ния выдачи первого импульса, Он соединен через эпемент ИЛИ 15 и эпемент И 4 с блоком 6 умножения, через элемент 16 задержки и элемент И 8-с суммато-, ром 9, через эиемент 17 задержки и элемент И 10 с блоком 11 буферной памяти и единичными входами блока 18 счетчиков адреса памяти реэупьтатов и первым входом элемента ИЛИ 19. )Бпок 18 счетчиков адреса памяти ре зультатов предназначен дпя управления выдачей результатов из двух соседних ячеек блока 7 памяти на бпок 6 умножения и представпяет собой два счетчика, один из которых предназначен дпя опреде 45 пения ячейки дпя умножения ее содержи-. мого на Х, а другойдля определения ячейки для умножения ее содержимого нв у.Второй вход элемента ИЛИ 19 соеди нен с выходом эпемента ИЛИ 15 и...
Устройство для вычисления коэффициентов фурье

Номер патента: 648989
Опубликовано: 25.02.1979
Авторы: Золотков, Никитин, Чабан
МПК: G06F 17/14
Метки: вычисления, коэффициентов, фурье
...п - разРядность слов входной и выходной инФормации; к - 0,1,п и выбирается иэ условия пикфактора во входных сигналах, подвергаемых преобразованию Фурье) подаются в параллельном коде на регистры 1,2,3,4. С выхода регистров п-разрядов каждого из операндов в последовательном коде подается в арифметический блок 7, оперирующий с п-разрядными словами, Табличные коэффициенты Х ,Ю длиной в и-разрядов подаются в йараллельном коде через регистры 5, б в блок 7. В блоке 7 производится вычисление величин:С -А + Ю В-ЫВС 1 = А+ Юя В+ ИВР= А - Хя Вн + ИВР =А-Х В -ИВвС выходов 17, 18, 19, 20 блока 7 считываются онерайды длиной в н+к Разрядов и подаются в запоминающее устройство. Кроме того, выходные операнды через элемент ИЛИ 8 подаются на регистр 9,...
Устройство для вычисления коэффициентов-фурье

Номер патента: 1049920
Опубликовано: 23.10.1983
МПК: G06F 17/14
Метки: вычисления, коэффициентов-фурье
...выходов арифметического блока являются параллельными выходами действительной и мнимой частей результата устройства, выходы знаковогой дополнительного разрядов первой группы выходов арифметического блока подключены к входам первого сумматора по модулю два, выходы знакового и дополнительного разрядов второй группы выходов арифметического блока подключены к входам второго сумматора по модулю два, выходы первого и второго сумматоров по модулю два через элемент ИЛИ подключены к входу первого триггера, выход первого триггера подключен к входу второго триггера, выход второго триггера подключен к входам управления сдвигом регистров действительных и мнимых частей первого ивторого операндов.Кроме того, арифметический блок состоит из четырех...
Устройство для вычисления коэффициентов многочлена

Номер патента: 450171
Опубликовано: 15.11.1974
Авторы: Корнейчук, Самофалов, Тарасенко, Тесленко, Хижинский
МПК: G06F 7/39
Метки: вычисления, коэффициентов, многочлена
...000 000 Рег. У,000 000 ооо 010 ООО 000 01 101 001 Рег. 1,011 001 011 10 000 000 0001 0000 0011 0101 0000 в 1 000 ООО 000 Рег, Уо 010 0000 00110101 0001 0000 оп 101 001 Рег, У,00,1 0101 1011 1010 0000 0001 101 011 001 Рег. У,001 1010 1011 10101 0000 0011 01011 10101 ООООО 01010 0001 011 10 001 Рег, У 001 10100 10110 01011 11001 0001 000 000 000 Рег, У,000 10100 01011 11001 10110 00011 ооо 000 000 Рег. У,01011 1100 00011 000 10100 1011 001011 011001 010100 010110 000011 Результат 3равно 5, устанавливаются в нулевое состояние. С началом работы устройства блок управления 6 вырабатывает сигнал, открывающий логическую схему сИ 7, соединенную с младшим разрядом регистра 1 операнда У, и,воздействуя на регистр сдвига, подклочает выходы регистров...
Предыдущий патент: Устройство для регулирования разгрузочной щели конусной эксцентриковой дробилки
Следующий патент: Аппарат для обогащения полезных ископаемых
Случайный патент: Тигель индукционной вакуумной печи