Интегратор азимутных импульсов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
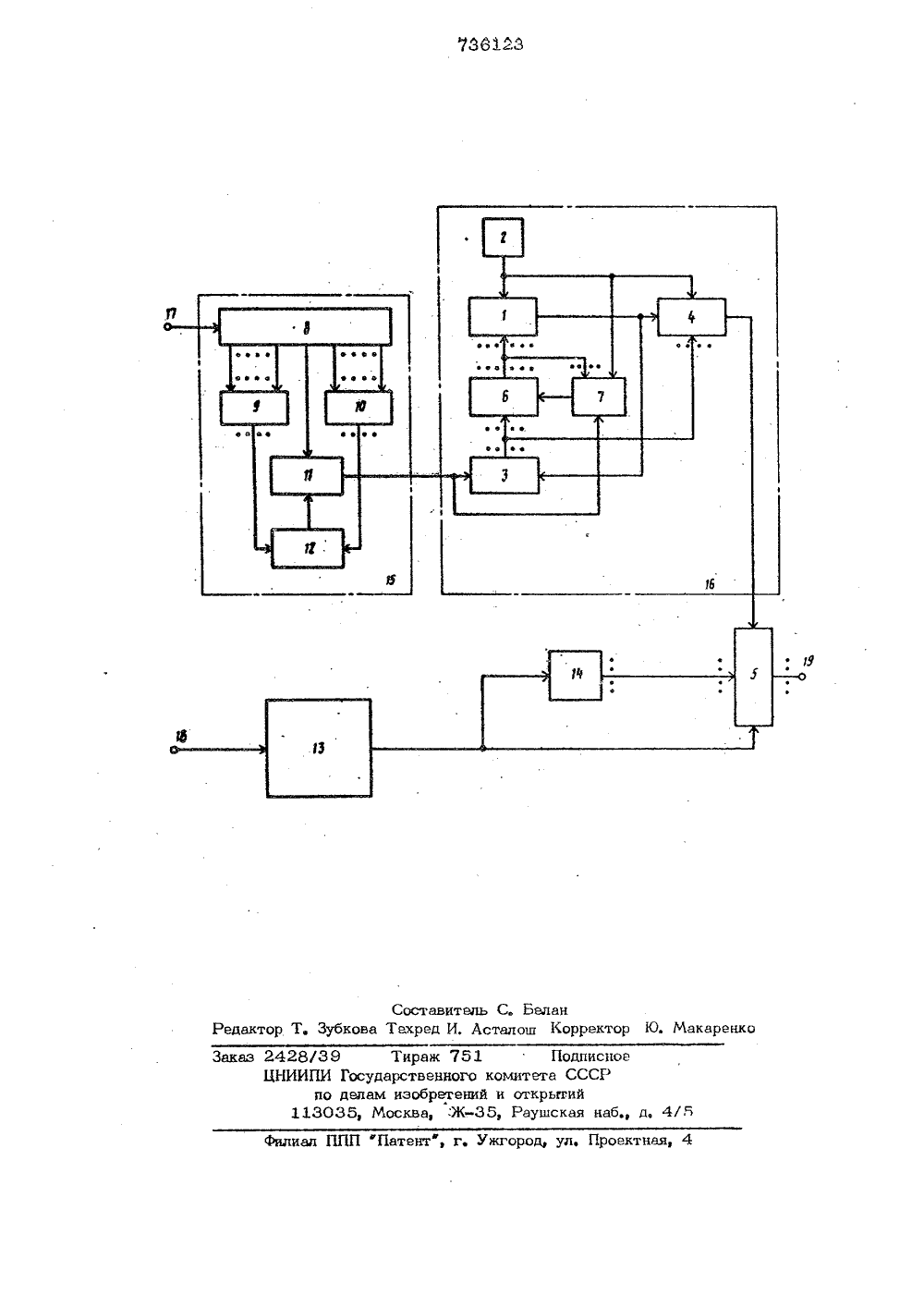
Союз СоветскикСоциалистическихРеспублик ОП ИКАНИЕИЗОБРЕТЕН ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(и 736123 1) Дополнительное к авт. свил-ву М 572795 2) Заявлено 14, 11.77 1)М. К 43531/18-24 06 б 7/1 исоелннением заявк Государственный комнт(23)прноритетпо делам нзооретен публиковано 25. 05.80. Бюллетень Ж 53) УДК 681 Э 3отары 05.8 ата опубликования описан Авторыобретения Е. Чеботаев и В,(71) Заявитель ИМПУЛЬСОВ НТЕГРАТОР АЗИМУТ то а е Изобретение относится .к автоматике и вычисдительной технике,. и может быть использовано для воспроизведения значения угла вращения инерционного обьекта или для воспроизведения других плавно изменяющихся процессов, информация о которых передается методом приращений, в системах с цифровой обработкой информации.В основном изобретении по авт.св. )Ф 572795 описан интегратор азимутных импульсов, содержаший управля ьщй делитель частоты, один из входов которого соединен с генератором импульсов, а другой подключен к выходу блока управления, первый вход которого соединен с выходом блока коррекции, второй вход блока управления соединен с выходом измерителя рассогласования, два входа которого подключены к шине азимутных импульсов и выходу управляемого делителя частоты соответственно, а выход соединен также с входом компенсатора фазовой ошибки, два других входа которого подключены к выходу генерв римпульсов и управляемого делителя частоты соответственно, в выход соединенс входом счетчика, другой вход которого подключен к шине юстировочного импульса, входы блока коррекции подключены к шине азимутных импульсов, выходу блока управления и генератора импуль.сов соответственно 11,Интегратор азимутных импульсов стаким управлением хорошо отслеживаетизменение частоты азимутных импульсовв широком диапазоне частот с сохранением точности воспроизведения угла,Компенсатор фазовой ошибки устраняетошибкупо фазе добавлением или вычитанием из входной последовательности импульсов повышенной частоты требуемогоколичества импудьсов. Значение угла поворота в двоичном параллельном коде получается интегрированием импульсов повышенной частоты счетчиком, сбрвсываемьж в исходное состояние один рвзза оборот юстировочным импульсом.35 Недостатком этого интегратора является недостаточная точность воспроизведения угла врашения, обусловленная ошибкой фиксации центра азимутного импульса в измерителе рассогласования, а так 5же юстировки вследствие неоднозначности сбрасывания счетчика юстировочнымимпульсом из-за нестабильности ампдитуды. Причем первая составляющая ошибки вносится каждым азимутным импудьсом, а ошибка юстировки вносится одинраз за оборот иди цикл изменения плавного процесса. Ошибки фиксации временныхположений импульсов обусловлены в основном нестабильностью амплитуд азимутных и юстировочных импульсов, ограниченностью полосы пропускания линийсвязи, по которым передаются азимутныеи юстировочный импульсы, а также наличием искажений в линиях связи, вызываемых различными шумами.Цель изобретения - повышение точности воспроизведения инерционных процессов,25Поставленная цель достигается тем,что в известный интегратор введены дварегенератора импульсов и блок вводакорректируюшего кола, аход которогосоединен с выходом первого регенерато 30ра импульсов, подключенным ко второмувходу реверсивного счетчика, третийвход которого подключен к выходу устройства ввода, выход второго регенера-тора импульсов подключен ко входу следящего умножителя частоты, а входырегенераторов импупьсов являются соответственно входами юстировочных и азимутных импульсов.На чертеже приведена структурнаясхема преддагаемого интегратора.Предлагаемый интегратор содержитуправляемый делитель частоты 1, генератор импульсов 2, измеритель 3 рассогласования, компенсатор 4 фазовой ошиб 45ки, реверсивный счетчик 5, блок управления 6, блок коррекции 7, линию задержки 8, сумматоры 9 и 10, устройство совпадения 11, схему сравнения 12,первый регенератор 13 импульсов, бдок5014 вводя корректируюшего кода, второйрегенератор 15 импульсов, сдедяшийумножитель 16 частоты, вход азимутныхимпульсов 17, вход юстировочньгх импульсов 18,выход интегратора 19.Выход сдедяшего умножителя 16 частоты соединен с первым входом реверсивного счетчика 5, вход блока ввода 14соединен с выходом первого регенерато 23фра 13 импульсов, а выход - со вторыми входами реверсивного счетчика 5, выход второго регенератора 15 импульсов подключен к входу сдедяшего умножителя 16 частоты, а входы регенераторов импудьсов являются соответственно вхс дами юстировочных и азимутных им пульсов, выход первого регенератора 13 импульсов подключен ко входу реверсивного счетчика 5. Регенергторы импульсов содержат линию 8 задержки, первый 9 и второй 10 сумматоры, устройство 11 совпадения и схему 12 сравнения, причем вход динии 8 задержки является входом регенераторов импульсов, первая и вторая группы отводов линии 8 задержки соединены с первым 9 и вторым 10 сумматором соответственно, а центральный отвод подключен к первому входу устройства 11 совпадения, второй вход которого соединен с выходом устройства 12 сравнения, два входа которого подключены к выходам первого 9 и второго 10 сумматоров соответственно, выход устройства 1 1 совпадения является выходом регенератора 15 импульсов. Интегратор язимутных импульсов работает следуюшим образом, При передаче угла врашения (инерционного процесса) методом прирашений по каналу связипередается последовательность азимутных импульсов, сдедуюших через равныеугловые интервады, и юстировочныйимпульс. Интегратор осуществляет экстраподяцию точного углового положениявала на интервале азимутньх импульсов,используя инерционные свойства врашаюшегося объекта,Азимутные импульсы умножаются нацедое, наперед заданное чисдо так, чтона выходе управляемого делителя 1 частот формируются импульсы повышеннойчастоты, равномерно расположенные внутри дискрета азимутных импульсов, Импульсы повышенной частоты через компенсатор 4 фазовой ошибки подсчитываются реверсивным счетчиком 5, выходныеразряды которого образуют параллельныйдвоичный код угла поворота объекта, Приизменении периода азимутных импульсовизменяется количество импульсов повышенной частоты с выхода управдяемогоделителя 1 частоты что приводит к динамической ошибке внутри дискрета входных импудьсов, Требуемое в этом случаеизменение частоты импульсов повышен,гой частоты осушествляется изменениемкоэффициента деления управляемого дели5 73612толя 1 частоты через блок 6 управленияи блок 7 коррекции по результатам нетолько подсчета количества импудьсовповышенной частоты за период междусоседними входными азимутными импупьсеми в измерителе 3 рассогласования,но и с учетом частоты азимутных импульсов. За счет такого управления сохраняется точность воспроизведения углав широком диапазоне входных частот 11азимутных импульсов. Импульсы повьш.энной частоты интегрируются реверсивнымсчетчиком 5, запускаюшимся каждымюстировочным импульсом с выхода первого регенератора 13 импульсов. 5Инерционные свойства вращающегосяобъекта (изменяющегося процесса) позволяют повысить разрешающую способность .интегратора путем умножения частотыазимутных импульсов. Замкнутый контур, 20состоящий из генератора 2 импульсов,управляемого делителя 1 частоты, измерителя 3 рассогласования, блока 6 управления и блока 7 коррекции осуществляетслежение за частотой азимутных импульсов и ее кратное умножение. Изменениечастоты импульсов повышенной частотыдостигается изменением коэффициентаделения ( с) управляемого делителя 1частоты таким образом, что Ж- соей.Для достижения данной пропорции блок 6управления и блок 7 коррекции изменяютЬ пропорционально ( . Поэтомуданный замкнутый контур хорошо отслеживает изменение частоты азимутных 35импульсов в широком диапазоне частотс сохранением точности воспроизведенияугла,При сравнительно низкой частоте азимутных импудьсов управляющее воздействие изменяется на большую величину, позволяющую более эффективно компенсировать ошибку по частоте. При высокойчастоте аэимутных импульсов управляющеевоздействие изменяется на меньшую величину, чем достигается меньшая динамическая ошибка. Ддя устранения ошибкипо фазе, сбусдовленной дискретностьюизменения коэффициента деления с управляемого делителя 1 частоты, в интегра. -торе применен компенсвтор 4 фазовойошибки, осуществляющий сброс ошибки Работа регенераторе 13 импульсов при поступлении юстировочного импульса аналогична. Следует отметить, что любой метод фиксации центра тяжести взимутного импульса вносит дополнительную погрешность, обусловленную запаздыванием сформированного импульса относительно истинного центра тяжести азимутного импульса. Но данная погрешность имеет систематический характер (првктически постоянна для широкого диапазона частот) и может быть соответственно компенсирована. Для компенсации данной погрешности используется блок 14 ввода корретируюшего кода, осуществляющий ввод корректирующего кода в реверсивный счетчик 5 в момент прихода каждого юстяровочного импуль- са. Вводить корректировку по каждому азимутному импульсу нецелесообразно из-за систематического характера погрешности. Блок ввода корректирующего кода может быть легко реализован нв обычньас логических элементах с изменяемой структурой. Последнее целесооб- разно при непостоянстве характера искажений в каналах связи. добавлением или вычитанием из выходной последовательности импульсов повышенной частоты требуемого количества импульс ов,Регенератор импульсов работает следующим образом. Азимутный импульс 3 6поступает на вход 17 линии 8 задержки,Выборки амплитуды азимутного импульса, проходящего по линии 8 зедержки,поступают с первой и второй групп отводов на входь первого 9 и второго 10сумматоров соответственно, Суммывыборок амплитуд с выходов сумматоров 9и 10 поступают на входь: схемы 12сравнения. На схеме 12 сравнения осуществляется их непрерывное сравнение.В момент равенства взвешенной суммывыборок значений огибающей азимутногбимпульса, снимаемой с выхода сумматора 9, сумме выборок значений огибающей азимутного импульсе, снимаемой свыхода сумматора 10, на выходе устройства 11 совпадения формируетсяимпульс, поступающий в качестве азимутного на вход следящего умножителя16 частоты.Разрешающий потенциал дпя прохождения этого импульса формируется самим входным азимутным импульсом,задержанным с целью выравнивания временных соотношений в динии 8 задержки,Разрешающий потенциал снимается сцентрального отводе линии 8 задержки.Регенеретор 15 импульсов осуществляеткак бы фиксацию центра тяжести азимутного импульса,те наличия укаэанных достоинств предлагаемого интегратора расширяется сфераего использования и функциональные воэможности. Проверка попученных выводовосуществлялась по результатам испытаний макета. Формула изобретения10 Интегратор азимутных импульсов по авт.св.572795, о т л и ч а ю - щ и й с я тем, что с целью повышения точности воспроизведения инерционного процесса, интегратор содержит два регенератора импульсов и блок ввода корректирующего кода, вход которого соединен с выходом первого регенератора импульсов, подключенным ко второму входу реверсивного счетчика, третий вход которого подключен к выходу устройства ввода, выход второго регенератора импульсов подключен ко входу следящего умножителя частоты, а входы регенераторов импульсов являются соответственно входами юстировочных и азимутных импульсов. Источники информации,принятые во внимание при экспертизе 1. Авторское свидетельство СССР М 572795, кл. 6 06 6 7/18, 1975, 7 738123При возможности априорной оценки искажений каналов связи возможна жесткая реализация как регенераторов импульсов, так и устройства ввода. В данном случае корректирующий код с выхода блока 14 однозначно определяется истинным запаздыванием импульсовр нэ сущих информацию об изменяемом процессе по отношению к самому процессу например, вращению антенны радиолока ционной станции). В данном случае диоперсия ошибки может быть снижена до номинальной.Предпагаемый интегратор азимутных импульсов обладает повышенной точностью 1 воспроизведения инерционного процесса (угла врашяния вела), что достигается фиксацией азимутных импульсов и юсти ровочных импульсов по их центрам тяжести. 20Компенсация вносимого запаздывания реализуется введением корректирующего кода в реверсивный счетчик 5 каждым юстировочным импульсом с помощью блока 14. Кроме того, следует отметить, что при резко выраженной несимметричности азимутных и юстировочных импульсов с выхода каналов связи возможна также фиксация их центра тяжести, но при. использовании в каж- З 0 дой из групп отводов линии 8 задержки разного количества отводов, В результакрыти ушска наб., д, 4/5 ППП "Патент, г. Ужгород, ул. Проект 28/39 Тираж 751КИПИ Государственного комипо дедам изобретений и113035, Москва, Ж,одписноеСССР
СмотретьЗаявка
2543531, 14.11.1977
ПРЕДПРИЯТИЕ ПЯ А-3327
ЧЕБОТАЕВ ОЛЕГ ЕГОРОВИЧ, РУДАКОВ ВИТАЛИЙ ВЛАДИМИРОВИЧ
МПК / Метки
МПК: G06G 7/18
Метки: азимутных, импульсов, интегратор
Опубликовано: 25.05.1980
Код ссылки
<a href="https://patents.su/5-736123-integrator-azimutnykh-impulsov.html" target="_blank" rel="follow" title="База патентов СССР">Интегратор азимутных импульсов</a>
Устройство для преобразования цифрового кода в частоту импульсов

Номер патента: 595858
Опубликовано: 28.02.1978
МПК: H03K 13/20
Метки: импульсов, кода, преобразования, цифрового, частоту
...деленияПодключен к счетному Входу сетн 1 кй 4 импул 1 СОВ. В 1.1 хо 1 ы р;1 зр 51 до СЧСТ 1 К 1 СОСТННСНЫ С ВХОДМи УСТДНОКН КО. торого упрдлясмого делителя 5 частоты, Выход которого является выходом устройствл.2;, 1 отснциальн 1 п Вход элемента 2 сов 2;синясоединен с источником 6 оордзцового ременного интервала Г.С выхо;л генератора 1 на вход элс.1 снтл 2сопадения поступает импульсная послсдол тс;1 ыость чдстО 1 ы . Если элемент сОВП 11 дснн 51ко:,1 и вобрс К 35 1 оли)с каз 178311 Ои о р ии ), и р. С иГ о воткроется иа время Т, то иа вкод делителя 3 частоты поступает импульсная последовательИОсть из ЛИмпульс 013, Гдс Л=, Т. В 1)езЛьтатс дс(1 сиия 1 ст 01 ь ис 3.(Оде дслитсл 51 3 11- (ТОГЫ С 3 СтсИ 13(И 3;СаЫ) Ко)ффпИСГ 0,СЛСИИЯ Л ИО;1...
Генератор импульсов с изменяющейся частотой

Номер патента: 1503060
Опубликовано: 23.08.1989
Автор: Медников
МПК: H03K 3/64
Метки: генератор, изменяющейся, импульсов, частотой
...частота вновь плавно увеличивается по закону геометрической прогрессии до максимальной, установленной задатчиком 11 максимальной частоты, затем цикл изменения повторяется (фиг.3 б).Если на втором выходе задатчика 14 режима установлен логический 0", а на его первом выходе - уровень лг 1 гической "1", то на выходной шине 10 генерируются импульсы, частота которых изменяется от наибольшей Р к наименьшей Рмц по закону геометрической прогрессии, после чего частота скачком изменяется до максимальных значений Р, затем цикл повторяется (фиг.За).В том случае, когда на выходах задатчика 14 режима установлены нулевые уровни напряжений, выходная частота плавно изменяется по закону геометрической прогрессии как в сто 03060 0 5 1 О рону...
Генератор импульсов инфранизких частот

Номер патента: 443462
Опубликовано: 15.09.1974
МПК: H03K 3/02
Метки: генератор, импульсов, инфранизких, частот
...интегратор ба.По окончании импульса одновибратора 8 коммутатор 1 а спова подключит рабочих электрод интеграто ра ба к общей точке соединения резистора 7 а и триггера Шмитта 2 а, За счет протекания тока разряда разрядится интегратор ба, при этом все запасенное на рабочем электро- зо де хлористое серебро перейдет на его накопитольный электрод. Триггер Шмитта 2 а сформирует выходной импульс, передний фронт которого образуется в момент подсоодинения з 5 рабочего электрода заряженного интегратора ба ко входу триггера Бмлтта 2 а (при этом напряжение на входе триггера Шмитта 2 а, определяемое напряжением на рабочем электродо заряженного интегратора ба, становится ниже порога срабатыв"- ния триггера Шмитта 2 а), Задний фропт илпульса триггера...
Устройство для цифрового измерения разности частот двух последовательностей импульсов

Номер патента: 481852
Опубликовано: 25.08.1975
Автор: Фогт
МПК: G01R 23/10
Метки: двух, импульсов, последовательностей, разности, цифрового, частот
...- к выходу генератора импульсов,И Импульсы уменьшаемой последовательности поступают на первый вход элемента ИЛИ 1, генератора 2 периодических импуль даются импульсы генератора 2. Суммарная последовательность импульсов, состоящая иэ уменьшенной последовательности и периодических импульсов генератора 2, поступает с выхода элемента ИЛИ на второй.вход блока 3. На первый вход блока 3 подается вычитаемая последовательность импульсов. Раэностная последовательность импульсов с выхода блока 3 поступает на счетный вход нормируюшего счетчика 4, .который накапливает импульсы до момента.1)к ив . та, И Я Д СиР )02 По,аписиое 1 Е 111111111 Го уяаг)ственного кмстета Совета Министров СССР по ссакс нвобрвтсиий и открытий Москва, 13 С 3:,...
Устройство для измерения разности частот импульсов

Номер патента: 728492
Опубликовано: 15.04.1983
Авторы: Бойко, Жернов, Парышев, Скаткин
МПК: G01R 23/02
Метки: импульсов, разности, частот
...элемент 8 ИЛИ, второй дополнительный преобразователь 9 код-частота, дополнительный реверсивный счетчик 10, дешифратор 11.Каждый преобразователь код-частотаф 3, 4, 9 содержит элементы совпадений 12, счетчик 13 таймерных импульсов, блок сборки 14, Блок пересчета 2 содержит элементы совпадений 15 и 16, реверсивные счетчики 17,Устройство работает следующим образом.В установившемся режиме на реверсивном счетчике 1 присутствует код ,числа пропорционального разности входных Частот импульсов и /ит, и = и -иО Тфгде п - частота основного детек 1тора;иФ - частота фонового детектора.Генератор 5 таймерных импульсов постоянно вырабатывает импульсы с частотой ит, которые пересчитываются таймерным счетчиком 13. Импульсы, возникающие на разрядных...
Предыдущий патент: Множительно-делительное устройство
Следующий патент: Многоканальный частотный интегратор
Случайный патент: Кварцевый rс-генератор