Способ определения пространственного положения скважинного снаряда
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
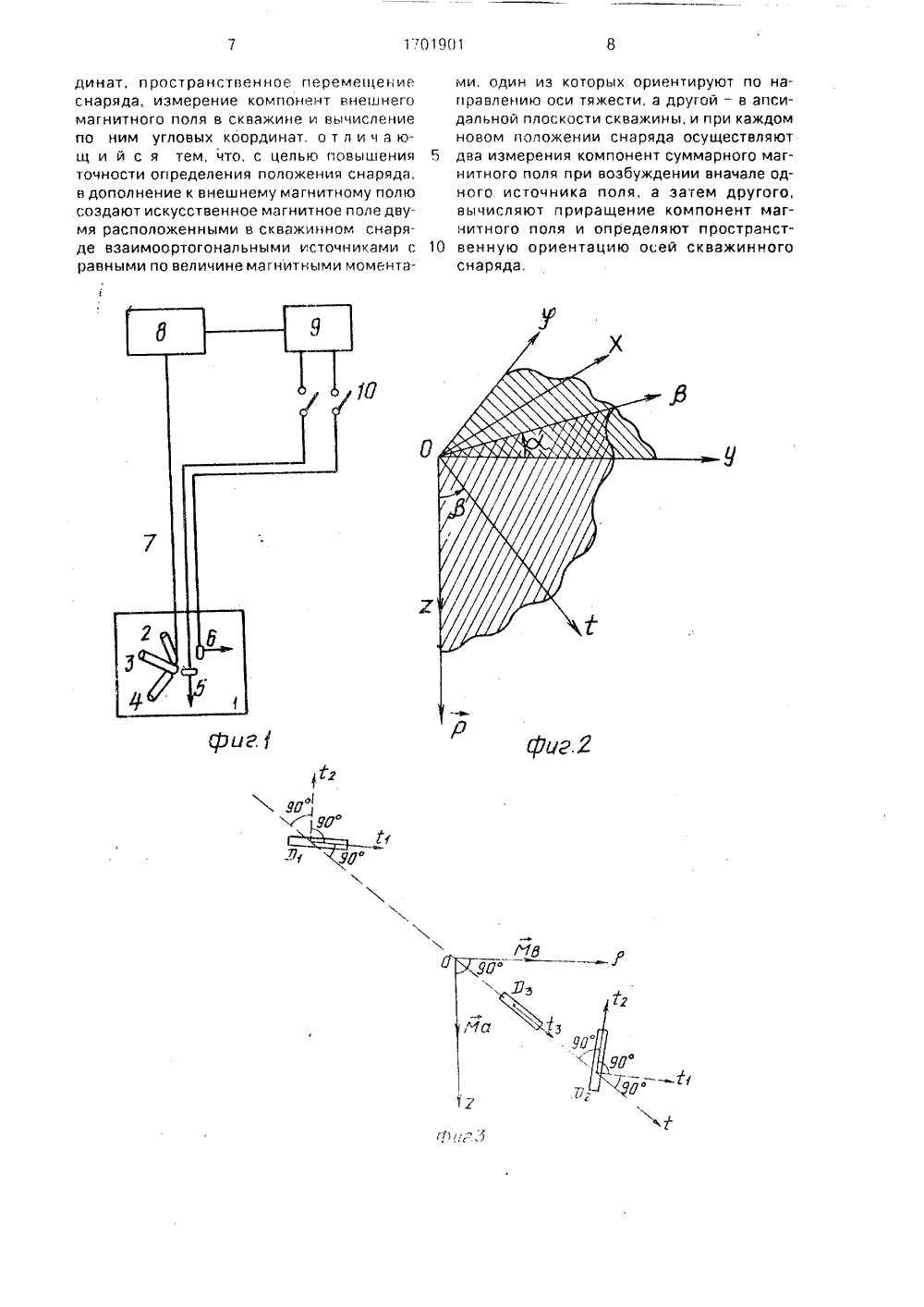
.т К)З СОВГТСКИХ ЦИАЛИСТИЧЕСК 5 О . РЕСГГУВЛИ 5)5 Е 21 В 47/02 АНИ РЕТЕН К АВТ изичеволяет стран- аряда ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТПРИ ГКНТ СССР ОУУ СВИДЕТЕЛЬСТВУ(71) Институт геофизики Уральского отделения АН СССР(56) Авторское свидетельство СССРМ 804822, кл, Е 21 В 47/02, 1979,Авторское свидетельство СССРМ 1076573, кл, Е 21 В 47/022, 1982.(54) СПОСОБ ОПРЕДЕЛЕНИЯСТРАНСТВЕННОГО ПОЛОЖЕНИЯ СЖИННОГО СНАРЯДА(57) Изобретение относится к геофским исследованиям скважин и позповысить точность определения проственного положения скважинного сн Изобретение относитсяк геофизическим исследованиям скважин и предназначено для определения угловых характеристик положения перемещаемых обьектов, в частности для определения положения скважинного снаряда.Цель изобретения - повышение точности определения положения скважинного снаряда.На фиг, 1 приведена структурная схема устройства для реализации способа; на фиг, 2 - расположение осей неподвижной системы координат, вектора Н силы тяжести, вспомогательных осей р, т/) и оси т снаряда; на фиг, 3 - положение датчиков Д 1, Д 2, ДЗ, ориентация их осей т 1, 2, тз оси т снаряда и ооиентация осей источников искусственного магнитного поля с моментами Ма и Мб; на фиг. 4 - ориентация вспомогательных осей р, тр, Й и оси Л неподвижной системы(С). Измеряют на поверхности компоненты (К) внешнего магнитного поля (МП) датчиками скважинного С. Оси датчиков совмещаю 1 с осями опорной системы координат, перемещают С и измеряют К внешнего МП в скважине. В дополнение к внешнему МП создают искусственное МП двумя взаимоортогональными источниками с равными по величине магнитными моментами. Один из моментов ориентируют по направлению силы тяжести, а другой - в апсидальной плоскости. При каждом новом положении С производят два измерения К суммарного МП при возбуждении вначале одного источника МП, а затем другого. Вычисляют приращение К суммарного МП и определяют пространственную ориентацию осей скважинного С, 5 ил,координат,на фиг. 5 - взаимное расположение осей датчиков, осей неподвижной системы координат и осей источниковискусственного магнитного поля,Устройство для реализации способа содержит скважинный снаряд 1 с датчиками2 - 4 магнитного поля, оси которых совпадают с осями снаряда 1 и образуют подвижнуюсистему координат, В состав устройствавходят также источники 5 и б искусственного магнитного поля. например соленоиды,соединительные провода 7, измерительныйузел 8, источник 9 ЭДС для питания узла 8 иисточников 5 и б и переключатель 10.Способ реализуется следующим образом.Совмещают оси датчиков 2-4 скважинного снаряда 1 с осями опорной неподвижной системы координат и с помощьюизмерительного узла 8 датчиками 2 - 4 изме.ряют на поверхности компоненты внешнего магнитного поля, Г 1 еремещают снаряд 1 в скважине (не показана) и вновь измеряют компоненты внешнего магнитного поля. Затем в дополнение к внешнему магнитному полю создают искусственное магнитное поле двумя расположенными в скважинном снаряде 1 взаимоортогональными источниками 5 и б с равными по величине магнитными моментами, Причем момент источника 5 ориентируют по направлению силы тяжести, а момент источника б - в аксидальной плоскости скважины, При каждом новом положении снаряда 1 в скважине осуществляют два измерения компонент суммарного магнитного поля при возбуждении от источника 9 ЭДС вначале одного источника 5 поля, а затем другого источника б поля, например, замыкая переключателем 10 один из проводов 7. По результатам измерений вычлсляют приращение компонент магнитного поля и определяют и рира щение, пространственную ориентацию осей скважинного снаряда 1 по значениям синусов и косинусов трех углов,Оси Х, У, Е(фиг. 2) образуют неподвижную систему координат, а ось т снаряда 1 образует вместе с осью Е аксиальную плоскость (выделена штриховкой),Повернув систему координат ХУЕ относительно оси Е на угол а; получают систему координат рр Е. Г 1 ричем ось р лежит на пересечении апсидальной и горизонтальной плоскостей (часть горизонтальной плоскости между осями У и о заштрихована), Угол а определяет положение апсидальной плоскости ЕО р относительно плоскости 7 ОУ и плоскости ЕО р относительно плоскости ЕОХ, а угол Р, показанный на фиг, 2, - положение оси т относительно оси Е в апсидальной плоскости.Датчики 01, 02, Оз (фиг. 4) имеют оси т 1, тг, тз. Причем ось сз да гчика Оз совпадает с осью т снаряда 1, Оси источников искусственного магнитного поля (соленоидов) с моментами Ма и Мб сориентированы относительной осей с и В (ось В порождена осью р при повороте системы координат рр Х в апсидальной плоскости относительно оси р на угол 3 до совмещения оси Е с осью т), Заштрихованы: внизу часть апсидальной плоскости между осями 2 и В, вверху часть плоскости, перпендикулярной оси с, в которой лежат оси у, В, т 1, тг, Г 1 ричем ось тг образует угол у с осью Е, а ось 1 образует угол 90 + у с осью Р.Пусть постоянное внешнее магнитное поле Т имеет в фиксированной систе ле координат компоненты Т, Гу (выбирают систему координат так, чтобы Тх = О), Проектируя горизонтальную составляющую Т наоси р и р, получаютТ = Ту соза,5 Ту=-Ту81 п а.Проектлруя на ось(тз) компоненты Т иТр получаютТз =Т соз/3+Ту соз а з 1 П Р,Проектируя те же компоненты на ось В,10 получаютТг = Ту соз а соз 3- Т 2 8 и ф.Далее, проектируя компоненты Т, и Тна оси т 1 и тг, получаютГ 2=ТГ созу+ Т 81 п у,15 Т 1=Тр соз у - Тг з 1 пуПодставив полученные выражения дляТг и Т, получаютТ 1 = - Ту 51 п а сОЯ у - (Ту соз а соз 3 - Т з 1 п Р)81 п у,Тг = (Ту соз а СОЬ - Ъ з 1 пфсозУ-Тз 1 п а зи у (1)Тз=Т, созф+Ту соза 81 прВ случае, когда дополнительное магнитное поле создается соленоидом малых размеров с моментом М, его напряженностьможно представить в следующем видеЙ = 3 Й (Ц В)/В - М/В,где 1" , - радиус-вектор, проведенный из точки наблюдения в центо соленоида,В данном случае Е направлен по оси тдля датчика 01 и против нее для датчика 02,Поэтому поле В, создаваемое моментом Ра,имеет компоненты Вт = 3 Масоз ф/В и3Вг =. -Ма/В, а проектируя на оси датчиков01, 02, Оз с учетом направления Р получаютВ 1.=81 п ф з 1 пу М/ВВг, = з 1 пСов у М/В 1 (2)Вза = 2 созе М/Вз,где В 1 - расстояние до датчиков 01 и 02(расстояния от центра соленоидов до датчиков 01, 02 равны),Вз - расстояние до датчика Оз,Поле ЕГ создаваемое моментотм Мб,45 . зимеет компоненты В 1 = 3 Мб 8 Пф/В иВу= -Мб/В, а проектируя на оси датчиков,получаютВ 16 = соз/3 3 ПуМ/В 1В 26 = -соз 1СОВ уМ/В 1 (3)Взб = 2 8 и РМ/ВзВ фоРмУлах (2), (3) Учтено, что Ма = Мб ==М.Таким образом, измерив компонентыТ 1, Тг, Тз внешнего поля, компоненты Т 1 а,Т 2 а, Тза поля при включенном источнике поля с моментом Ма и компоненты Т 16,Т 26. Тзбпри включенном источнике поля с моментом Мб, вычислив приращения компонентВ 1 а, В 2 а, Вза и В 16, В 26, Взб поля и знаявеличины Тг, Ту из систем (1) - (3), можнооднозначно определить косинусы и синугы углов а, 3, уи тем самым определить ориентацию осей снаряда относительно неподвижной систему ХУ 7,Формулы для определения значений 5 синусов и косинусов указанных углов можно получить следующим образом,Из второго уравнения системы (3) име 20 где Вб = Вб Аналогичнь нения получаю з 1 п у Выражают мы(2) созРи и соз Возведя в к стем (2) и (3) и с ВЗа + Подставив значение 2 М со+Вбм образом из первого у(5)25 В 16/Вб,из третьего уравнения симеютф = Вза/2М/Вз,вадрат третьи уравненияложив, получаютВЗб = (2 М/Йзз),в предыдущее уравне/Вз, получают3 /3= Вза/Вз. и 30ие где Вз = ВЗа + ВЗб Аналогично из третьего уравнени 35я системы (3) имеютз 1 п 3 = Взб/Вз (7)Для определения косинуса и синуса угла а используют систему (1), Умножая пер вое на уравнение на соз у, а второе - на з 1 п у, получаютТ 1 СОЗу = - Ту з 1 п а соз 2 уТу Сов а соя 13 - Т, з 1 п Д соз у зи у,45 Т 281 ПУ = (Тусоз а созр - Тгз 1 пД Х Х СОЗ у з 1 г 1 у- Ту з и а з п 2 у.Складывая эти выражения, получаютТ 1 СОЗу+Т 2 з 1 пу= - Ту з 1 па, От куда, выразив косинус и синус у иэ (4) и (5), определяют з 1 п а в видез 1 п а= (Т 1 В 26 - Т 2 В 16)/Ту Вб (8)Выражение для соз а получают из третьего уравнения аналогичным образом 55соз а= (Тз Вз - ТгВза)/Ту Взб (9)Таким образом, получены выражения для всех величин, с помощью которых однозначно определяются углы а,3, у, В случае, когда ось т совпадает с осью Е(з 1 п Р = О, соз соз у= -В 26Я 1 /М созе310При возведении в квадоат первого ивторого уравнения системы (3), получаютВ 1 б + В 2 б =(М соз/Я 1 з),откуда1 соз Р = /В 1 б + В 2 б 2 М/Р 1 15Так как Р 1.тг/2 , то соз р0 исозф = С 053, поэтомусоз у= -В 26/Вб, (4)/3 1), формулу (9) использовать нельзя. таккак в этом случае Взб = О, но посколькуинформацию о равенстве нулю угла /3 л.гкополучить из проверки значений Взб. В 1 иВ 2 а, то нужно воспользоваться другим выражением для соз а. Поскольку при/3= О первое и второе уравнения системы (1)переходят в следующиеТ, = - Ту з 1 пасоз у- Ту соз а з 1 п у,т 2 =- ту сова сову - Ту з 1 п а з 1 п у,(10)то, умножив первое уравнение на синус, авторое - на косинус угла у и вычтя его изпервого, получают Т 1 Яи у - Т 2 соз у == Ту соз а . Откуда следует, чтосоз а= -(Т 2В 26+ Т 1В 16)/ВбТу (11)П р и м е р, Пусть неподвижная системакоординат ориентирована следующим образом: ось Х направлена на восток, ось У насевер, ось Л вверх. Положим, что Т = О, Ту =- 1, Т = 2 и а = О, 3 = 30", у = 45. Поформулам(1) находят Т 1= (1- 3/2), Т 2 = -Т 1,Тз = у 3 + 1/2.По формулам 2) и (3) получаютВ 1 а = -1/2У 2/2М/В 1, Вра =1/2/2/2м/В 1, Вза = 23/2м/ВзВ 16 = /3/2 /2 2 М/В- /3/2 /22 М/Р 1, ВзбМЯз .Используя выражения, определяющиевеличины Вз и Вб, находят их в виде Бб =(7), (8) и (9) вычисленные значения входящихв них величин, определяют синусы и косинусы в виде зп у = 12, соз у = 1/У 2. Следовательно угол у = 45, Далее находят з 1 пР = 1/2, соз /3 = 3.2, следовательно, уголР =ЗОО, Затем находят зи а = О, соз а = 1,следовательно, угол а = 0,Изобретение по сравнению с прототипом обеспечивает повышение точности определения ориентации осей скважинногоснаряда за счет использования датчиков одной физической природы - датчиков магнитного поля, повышение достоверностиопределения положения осей снаряда безиспользования данных инклинометрии ипозволяет определить ориентацию снарядапри его произвольном положении.Формула изобретенияСпособ определения пространственного положения скважинного снаряда, включающий измерение нэ поверхностикомпонент внешнего магнитного поля датчиками скважинного снаряда, оси которыхсовмещают с осями опорной системы к юр динат, пространственное перемещение снаряда, измерение компонент внешнего магнитного поля в скважине и вычисление по ним угловых координат, о т л и ч а ющ и й с я тем, что, с целью повышения точности определения положения снаряда, в дополнение к внешнему магнитному полю создают искусственное магнитное поле двумя расположенными в скважинном снаряде взаимоортогональными источниками с равными по величине магнитными моментами. один из которых ориентируют по направлению оси тяжести, а другой - в апсидальной плоскости скважины, и при каждом новом положении снаряда осуществляют 5 два измерения компонент суммарного магнитного поля при возбуждении вначале одного источника поля, а затем другого, вычисляют приращение компонент магнитного поля и определяют пространст венную ориентацию осей скважинногоснаряда,
СмотретьЗаявка
4737907, 14.07.1989
ИНСТИТУТ ГЕОФИЗИКИ УРАЛЬСКОГО ОТДЕЛЕНИЯ АН СССР
ЯКОВЛЕВ АЛЕКСЕЙ АЛЕКСЕЕВИЧ, РАТУШНЯК АЛЕКСАНДР НИКОЛАЕВИЧ
МПК / Метки
МПК: E21B 47/02
Метки: положения, пространственного, скважинного, снаряда
Опубликовано: 30.12.1991
Код ссылки
<a href="https://patents.su/5-1701901-sposob-opredeleniya-prostranstvennogo-polozheniya-skvazhinnogo-snaryada.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения пространственного положения скважинного снаряда</a>
Способ определения магнитного момента дипольного источника поля и координат точки приложения этого момента

Номер патента: 1064251
Опубликовано: 30.12.1983
Автор: Смирнов
МПК: G01R 33/02
Метки: дипольного, источника, координат, магнитного, момента, поля, приложения, точки, этого
...Затем изменяют масштаб измеренных компонент векторов магнитной индукции . в указанных точках пространства с учетом исключения компонент вектора однородного магнитного поля, т,е. изменяют масштаб -векторов магнитной 35 индукции в данных точкам пространства и осуществляют поворот этих векторов на один и тот же угол. После ,этого определяют вектор магнитной индукции в третьей точке пространст 40 ва и сравнивают его по величине инаправлению с вектором магнитной индукции, полученным по измеренным . компонентам в этой же точке пространства, В результате сравнения получают разностный вектор магнит" ной индукции, который определяет погрешность, обусловленную выбором начальных параметров (расстояние до дипольного источника и направление на...
Устройство для непрерывного измерения скоса оси легкого намагничивания цилиндрической магнитной пленки

Номер патента: 487360
Опубликовано: 05.10.1975
Авторы: Бекетов, Воронин, Коперсако
МПК: G01R 33/12
Метки: легкого, магнитной, намагничивания, непрерывного, оси, пленки, скоса, цилиндрической
...к первичцой обмотке лифферсцциальцого трансформатора 7. Гсцератор 8 соелицец последовательно с формиро вателем импульсов электрического тока 9 иобмоткой 10, охватывающей образец 5 и комцецсирующую проволоку 6. Импульсный усилитель 1 соединен последовательно с лцскримипатором 12 и 51 рсоо 1 азовагслем цмцульсцыдх зО сигцалов и постояццос цапряжсцис 13, причемТиравс 90комитета Совета Мпнретепий п открыл пиауисеая паб., д. 1 гв стров СССР ипографпи, пр, Сапунова, 2 вход усилителя 11 подключен ко вторичной обмотке трансформатора 7, управляющий вход дискриминатора 12 через линию задерж. кп 14 соединен с выходом генератора 8, а выход преобразователя 13 присоединен к управляющему входу источника 1.Устройство работает следующим...
Способ изготовления полых деталей со ступенчатой осью

Номер патента: 1349820
Опубликовано: 07.11.1987
Авторы: Брагин, Волков, Кобышев, Судариков, Шарапенко
МПК: B21C 37/29
Метки: осью, полых, ступенчатой
...части заготовки одно-. сторонним поперечным усилием Гв, прикладываемым к вкладышу 3, на величину Е . При этом образуется полая заготовка со ступенчатой осью с осевой длиной 1, с о, толщиной стенки Г.,сто с расстоянием Е 1 между осью заготовЗБ ки и осью сдвинутой части заготовки. .Участки заготовки, поперечные оси заготовки, имеют нецилиндрическую форму поперечного сечения.На втором этапе штамповки сохраня ют давление Р в полости заготовки 1(фиг. 3). Производят осевую осадку заготовки 1 пуансонами 4 и 5 усилием . Г на величину Л 1. При этом изменяют направление действия одностороннего поперечного усилия на противоположное, производя обратный поперечный сдвиг формируемой части заготовки 1 на величину ЛЕ односторонним обратным...
Устройство для гидравлической штамповки полых деталей со ступенчатой осью

Номер патента: 1355312
Опубликовано: 30.11.1987
Авторы: Брагин, Кобышев, Судариков, Шарапенко, Шарапов
МПК: B21C 37/29
Метки: гидравлической, осью, полых, ступенчатой, штамповки
...другому,сжимая трубчатую заготовку 2 двумяусилиями Г. Под действием усилия осевого сжатия Р заготовка 2 теряет1" устойчивость и деформируется; приэтом ось заготовки изменяет прямоли-нейную форму, центральная часть заготовки 2 смещается вместе с подвижнымвкладышем в направлении перемещения15вкладыша поперечно оси заготовки 2.Продолжают перемещать пуансоны3 и 4 один навстречу другому, осаживая заготовку 2 и поддерживая внутринее давление жидкости Р до тех пор,2 О пока не будет достигнут требуемыйсдвиг Е деформируемой трубчатой ваготовки (фиг. 3).В процессе штамповки ролики 8 сво 25бодно вращаются в полуматрицах 1,в результате чего изгиб заготовкипроисходит без скольжения ее стенки взоне изгиба по поверхности матрицы.Таким образом,...
Штамп для гидравлической штамповки полых деталей с изогнутой осью

Номер патента: 1371734
Опубликовано: 07.02.1988
Авторы: Богоявленский, Брагин, Кобышев, Шарапенко
МПК: B21C 37/29, B21D 26/02
Метки: гидравлической, изогнутой, осью, полых, штамп, штамповки
...плоскостьюразъема, проходящей через ось симметрии штамп Вкладыш 3 выполнен с цилиндрическим отверстием, соосным цилиндрическому отверстию матрицы,разъемным с вертикальной осью разъема,проходящей через ось симметрииштампа, и с наклонными поверхностями, 40эквидистантными наклонным поверхностям полуматрици 2, имеющимипаз полусферического сечения.Кроме того,на чертежах обозначены трубная заготовка 8, готовая деталь 9,Штамп работает следующим образом.,Трубную заготовку 8 устанавлива"ют в цилиндрические отверстия матри 50цы и вклацьппа 3. Герметизируют полость заготовки 8 пуансонами 4 и 5.При приложении осевого усилия к пуансонам 4 и 5 к торцам заготовки 8,внутрь которой через канал 6 подают55рабочую жидкость под давлением, онатеряет...
Предыдущий патент: Способ электрокаротажа нефтяных и газовых скважин
Следующий патент: Ориентатор
Случайный патент: Способ определения тока утечки