Система для моделирования динамических процессов в системах автоматического управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
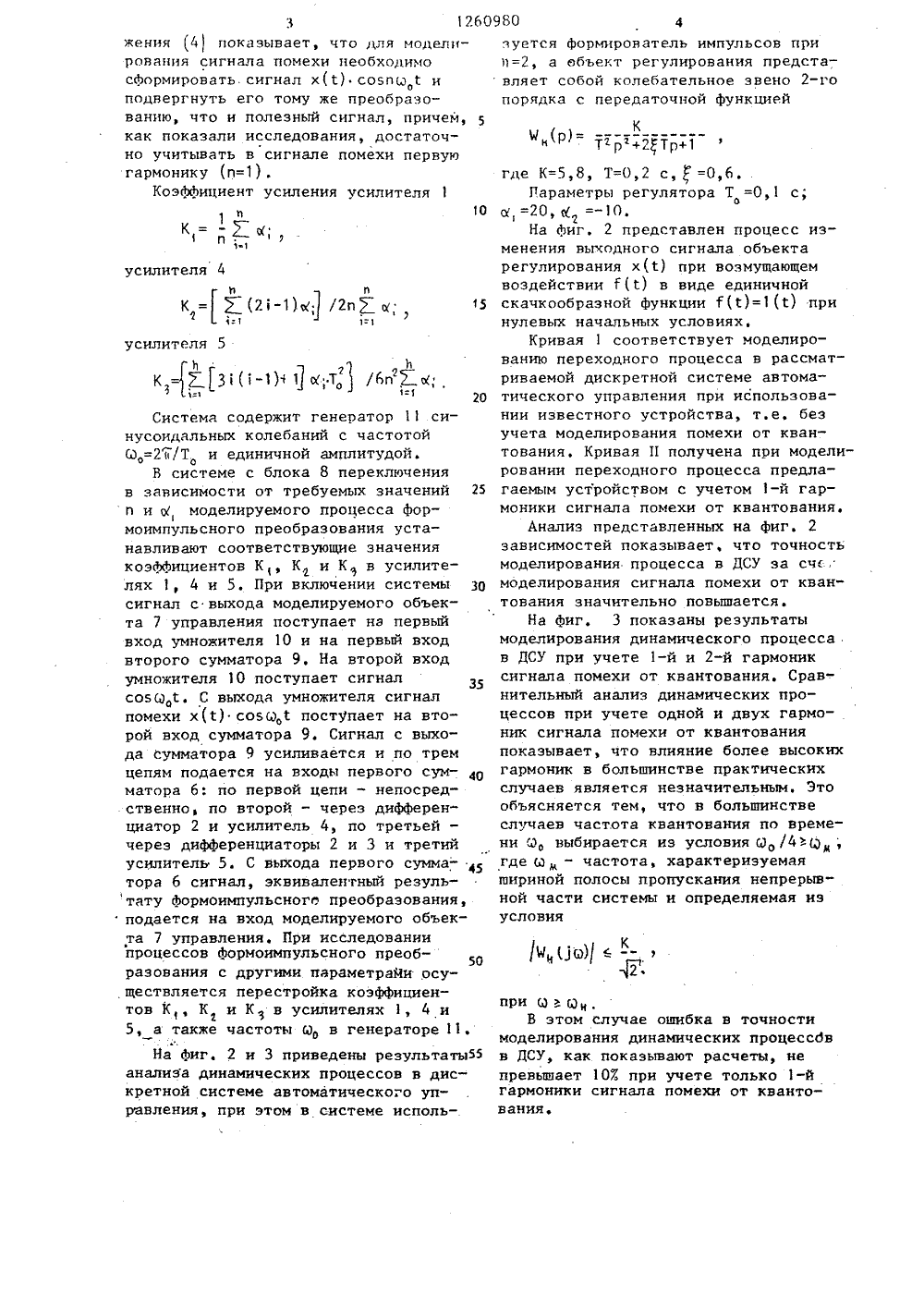
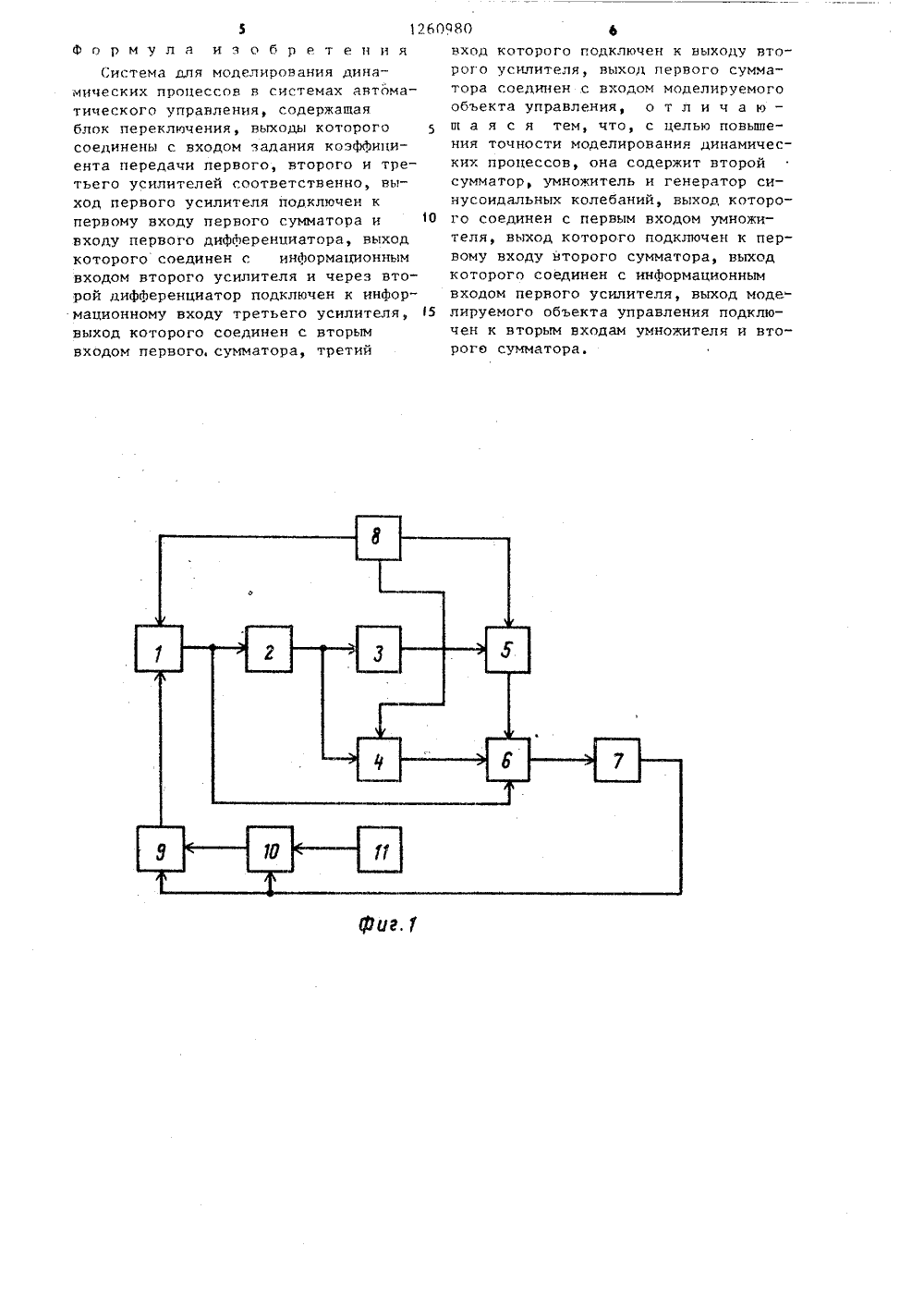
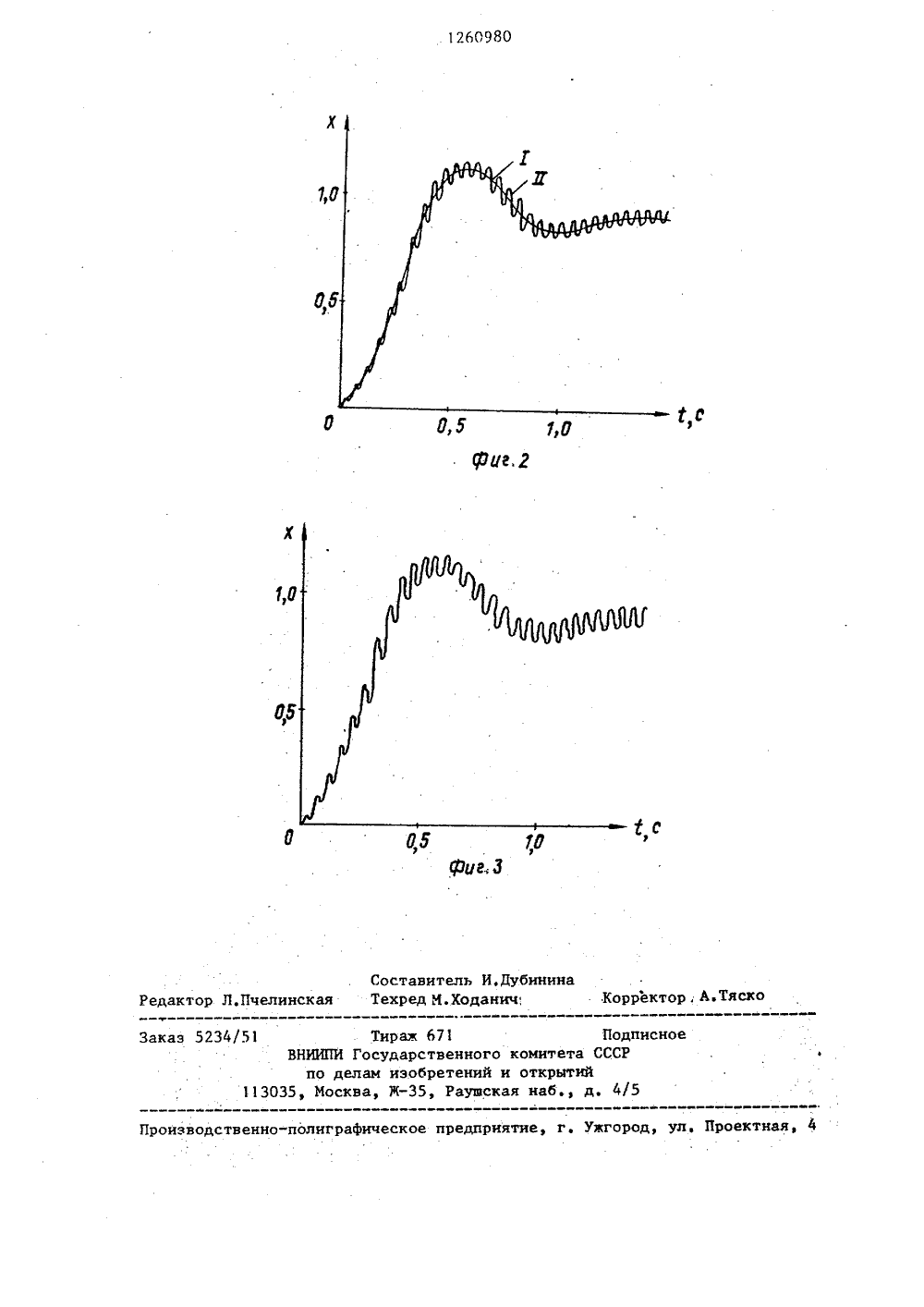
%3 ИаЕ ЕТЕНИЯ Е ИЗ ПИ ЛЬСТВ МУ Сви ВТО губо тво СС 2, 197 о СССР 2, 197 ельс 17/О ьств 7/О ВАН АВТОинааввани тем СУДАРСТВЕННЫЙ НОМИТЕТ СССРДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИИ(54) СИСТЕМА ДЛЯ МОДЕЛИР МИЧЕСКИХ ПРОЦЕССОВ В СИС МАТИЧЕСКОГО УПРАВЛЕНИЯ (57) Система для моделир мических процессов в с томатического управления относитсяк вычислительной технике, а именнок аналоговым вычислительным устройствам, применяемым для моделированиядискретных систем. Целью изобретения является повышение точности моделирования динамических процессов вдискретных системах управления. Указанная цель достигается тем, что визвестнуи систему дополнительно введены генератор синусоидальных колебаний, блок умножения и сумматор.Введение указанных блоков обеспечи,вает моделирование сигнала помехи отквантования по времени. 3 ил.Изобретение относится к вычислительной технике, а именно к аналого" вым вычислительным устройствам, применяемым для моделирования дискретных систем, и может быть использова Но при исследовании динамических процессов в дискретных системах уп" равления (ДСУ) с амплитудно-импульсной модуляцией, в которых осуществляется формоимпульсное преобразование,Цель изобретения - повьппенне точ" ности моделирования динамических процессов в ДСУ путем моделирования сигнала помехи от квантования по времени. 15На фиг. 1 представлена структурная схема системы для моделирования динамических процессов в системах автоматического управления; на фиг. 2 и 3 - результаты анализа ди намических процессов в дискретной системе автоматического управления,Система содержит первый усилитель 1, первый 2 и второй 3 дифференциаторы, второй 4 и третий 5 усилители, первый сумматор 6, моделируемый объект 7 управления, блок 8 переКлючения, второй сумматор 9, умно- житель 10 и генератор 11 синусоидальных колебаний. ЗОВ основу разработки системы положено использование приближенного эквивалентного представления ДСУ с форМоимпульсной коррекцией в виде непрерывной модели. 35Известно, что если на вход импульсного элемента;подается гармонический сигнал х(й)=а сози(1), то сигнал на выходе формирующего элемента описывается выражением: 40д с ПГ(Ях( и Я,) То 2 ПЗ У(С) - " ф,-х 21-1алсос (с пи)(с-- Т ) щ (1)Х 2 п 45где ц =.2(/Т - частота квантованияпо времени;и " количество переключений многократного импульса внутри периодадискретности;м( - амплитуда импульса1-го такта внутри периода дискретности.Из выражения (1) следует, что процесс квантования по времени и последующего формирования требуемых импульсов в дискретной системе управления приводит к существенному искажению входного сигнала.Ряд в правой части выражений (1) можно аппроксимировать его первым членом (п=О), а все остальные члены ряда считать помехой, вызванной квантованием сигнала по времени в импульсном элементе. При учете лишь первого члена и осуществляется моделирование исследуемой системы только по полезному сигналу.Выражение сигнала помехи можно записать в следующем виде:а ) ф 5(П С(Я 4 Пао)Г 1-1 Г 11с 05Т (ЯкФ пЯо с 05- То(,цмп а,) Т/их 5(пТ (Я ФпЯ ) + 51 п -То х д п оиси,Раскладывая тригонометрические функции, стоящие в фигурных скобках выражения (2), в ряд Маклорена и ограничиваясь двумя членами ряда,.получают выражение дпя помехи в следующем виде:2 а) С 05 П Я,Й)Поскольку это выражение для сигнала помехи соответствует случаю, когда на вход импульсного элемента поступает сигнал х.)=а созый, то при произвольном входном сигнале можно записать:(; (. о . афпг2 1)хГ(хсозп(1 ддСг о .11В основу разработки структуры .предлагаемого технического решенияположено выражение (4). Анализ выра3 12 б 0980жения (4) показывает, что для моделирования сигнала помехи необходимосформировать. сигнал х(1) созпи 1 иоподвергнуть его тому же преобразованию, что и полезный сигнал, причем,как показали исследования, достаточно учитывать в сигнале помехи первуюгармонику (п=1),Коэффициент усиления усилителя 1 КЯ (р)=Т р+2 Тр+1 ф 1 аК,= -, усилителя 4 15 1 г; -(Я Цц) сК12К = (21-1)Ы /2 п1=усилителя 5гк = е 3(-) 1 к;т1=1 20Система содержит генератор 11 синусоидальных колебаний с частотой Я;-2/Т и единичной амплитудой.ОВ системе с блока 8 переключения в зависимости от требуемых значений 25 и и М, моделируемого процесса формоимпульсного преобразования устанавливают соответствующие значения коэффициентов К, К и Кз в усилителях 1, 4 и 5. При включении системы зО сигнал с выхода моделируемого объекта 7 управления поступает на первый вход умножителя 10 и на первый вход второго сумматора 9, На второй вход умножителя 10 поступает сигналсозЯЙ. С выхода умножителя сигнал помехи х(й) созе,й поступает на второй вход сумматора 9. Сигнал с выхода сумматора 9 усиливается и по трем цепям подается на входы первого сум О матора 6: по первой цепи - непосредственно, по второй - через дифференциатор 2 и усилитель 4, по третьей - через дифференциаторы 2 и 3 и третий усилитель 5. С выхода первого сумматора 6 сигнал, эквивалентный результату формоимпульсного преобразования, подается на вход моделируемого объекта 7 управления. При исследовании процессов формоимпульсного преоб 50разования с другими параметрами осуществляется перестройка коэффициентов К К и Кз в усилителях 1, 4 и 5, а также частоты я в генераторе 11.На фиг. 2 и 3 приведены результаты 55анализа динамических процессов в дискретной системе автоматического управления, при этом в системе используется формирователь импульсов прив=2, а ебъект регулирования представляет собой колебательное звено 2-гопорядка с передаточной функцией где К=5,8, Т=0,2 с,=0,6.Параметры регулятора Т =0,1 с; с, =20, с( =-10На фиг, 2 представлен процесс изменения выходного сигнала объекта регулирования х(1) при возмущающем воздействии Г(1) в виде единичной скачкообразной функции .(й)=1(С) при нулевых начальных условиях.Кривая 1 соответствует моделированию переходного процесса в рассматриваемой дискретной системе автоматического управления при использовании известного устройства, те. без учета моделирования помехи от квантования. Кривая П получена при моделировании переходного процесса предлагаемым устройством с учетом 1-й гармоники сигнала помехи от квантования.Анализ представленных на фиг. 2 зависимостей показывает, что точность моделирования процесса в ДСУ за счев, моделирования сигнала помехи от квантования значительно повышаетсяНа фиг. 3 показаны результаты моделирования динамического процесса в ДСУ при учете 1-й и 2-й гармоник сигнала помехи от квантования. Сравнительный анализ динамических процессов при учете одной и двух гармоник сигнала помехи от квантования показывает, что влияние более высоких гармоник в большинстве практических случаев является незначительным, Это объясняется тем, что в большинстве случаев частота квантования по времени я, выбирается из условия Юо /4ц , где ц- частота, характеризуемая шириной полосы пропускания непрерывной части системы и определяемая из условия при яя,В этом случае ошибка в точности моделирования динамических процессбв в ДСУ, как показывают расчеты, ие превышает 107 при учете только 1-й гармоники сигнала помехи от квантования.формула изобретенияСистема для моделирования динамических процессов в системах автоматического управления, содержащая блок переключения, выходы которого соединены с входом задания коэффициента передачи первого, второго и третьего усилителей соответственно, выход первого усилителя подключен к первому входу первого сумматора и 1 О входу первого дифАеренциатора, выход которого соединен с инАормационным входом второго усилителя и через второй дифйеренциатор подключен к информационному входу третьего усилителя, 5 выход которого соединен с вторым входом первого. сумматора, третий вход которого подключен к выходу второго усилителя, выход первого сумматора соединен с входом моделируемогообъекта управления, о т л и ч а ю -щ а я с я тем, что, с целью повьппения точности моделирования динамических процессов, она содержит второйсумматор, умножитель и генератор синусоидальных колебаний, выход которого соединен с первым входом умножителя, выход которого подключен к первому входу второго сумматора, выходкоторого соединен с информационнымвходом первого усилителя, выход моделируемого объекта управления подключен к вторым входам умножителя и второге сумматора.. Проектная,1 ТирВНИИПИ Госудпо делам и 113035, Москва, Ж 671 Подп ственного комитета СССР бретений и открытий 5, Рауаская наб., д. 4/5
СмотретьЗаявка
3895828, 26.03.1985
ВОЕННЫЙ ИНЖЕНЕРНЫЙ КРАСНОЗНАМЕННЫЙ ИНСТИТУТ ИМ. А. Ф. МОЖАЙСКОГО
АРДАШОВ АВГУСТ АНАТОЛЬЕВИЧ, ТРЕГУБОВ СЕРГЕЙ ГАВРИЛОВИЧ
МПК / Метки
МПК: G06G 7/66
Метки: динамических, моделирования, процессов, системах
Опубликовано: 30.09.1986
Код ссылки
<a href="https://patents.su/5-1260980-sistema-dlya-modelirovaniya-dinamicheskikh-processov-v-sistemakh-avtomaticheskogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система для моделирования динамических процессов в системах автоматического управления</a>
Устройство для аналогового моделирования динамических процессов в дискретных системах автоматического управления

Номер патента: 1474695
Опубликовано: 23.04.1989
МПК: G06G 7/48
Метки: аналогового, динамических, дискретных, моделирования, процессов, системах
...достаточно учитывать в сигнале помехи первую гармонику (и = 1).Устройство работает следующим образом.С блока 8 переключения режимовработы в зависимости от моделирования процессов формоимпульсного или широтно-импульсного преобразования на вход ключа 15 подают сигнал, по которому через ключ 15 пропускается сигнал или с выхода сумматора 6 (при моделировании процессов формоимпульсного преобразования), или с выхода сумматора 14 (при моделировании систем с ШИК) и устанавливаютзначения коэффициентов К, К, Кэ, К и Кя в усилителях 1,4,5,13 и 17.При моделировании динамическогопроцесса в САУ с ШИМ значения коэфда х(й) = а созе то при произвольном входном сигнале х можно 10записатьх(Т ) - х - х(е) + - -х(т) . (5)о 2 6 20 Окончательное...
Устройство для моделирования процесса синхронизации коротковолновой радиолинии

Номер патента: 1073892
Опубликовано: 15.02.1984
Авторы: Муравчик, Полиевский
МПК: H04B 17/00
Метки: коротковолновой, моделирования, процесса, радиолинии, синхронизации
...подключен к выходу первого сумматора через четвертый элемент И, второй вход которого соединен с выходом датчика 65 двоичных сигналов, суммирующий ивычитающий входы второго реверсивного счетчика соединены с соответствующими выходами дискриминатора, второй вход дискриминатора соединен с выходом ренерсивного счетчика и с первым входом блока вычитания, второй входкоторого подсоединен к выходу цетвертого элемента И,выход блока вычитания подсоединен к первому входу первогоблока сравнения, второй вход которого подключен к выходу датчика двоичных сигналов, выход первого блока сраннения соединен со входом блока индикации, выход датчика двоичных сигна" лов через пятый элемент И подсоединен к четвертому входу первого сумматора, второй вход пятого...
Устройство для моделирования процесса теплопередачи в теплообменном аппарате

Номер патента: 1103258
Опубликовано: 15.07.1984
Авторы: Данишевский, Еременко, Иванов, Файкин
МПК: G06G 7/56
Метки: аппарате, моделирования, процесса, теплообменном, теплопередачи
...выход которого подключен к входу квадратора, выход которогосоединен с первым входом масштабного усилителя, выход которого является. первым выходом устройства, первый вход которого подключен к второму входумасштабного усилителя, выход которого соединен с входом блока нелинейности типа параболы, выход которого подключен к вторым выводам согласующих резисторов и к третьим входам сумматоров блоков моделирования уч .стков теплообменного аппарата, входы первого и третьего операционных усилителей и второй вход умножителя первого блока моделирования участка теплообменного аппарата являются соответственно вторым, третьим и четвертым входами устройства, выход второго операционного усилителя последнего блока моделирования участка теплообменного...
Устройство для моделирования статических и динамических характеристик привода координатно-шлифовального станка

Номер патента: 1113817
Опубликовано: 15.09.1984
Авторы: Лазенас, Осташявичюс, Скучас
МПК: G06G 7/48
Метки: динамических, координатно-шлифовального, моделирования, привода, станка, статических, характеристик
...усилитель соединен стретьими входами первого и третьегосумматоров,На чертеже изображено предлагае.мое устройство.Устройство содержит координатношлифовальный станок 1, исполнительный механизм 2, двйгатель 3 постоянного тока, ременную передачу 4,1 Осумматоры 5, 6 и 7, интеграторы8-11, усилители 12, 13 и 14, блокмоделирования холостого хода привода, выполненный в виде источника15 постоянного напряжения, блок моделирования внешнего момента сопротивления привода, выполненный в, виде преобразователя 16 угла поворота в напряжение.Устройство работает следующим 20образом,Станок 1 и исполнительный механизм 2 в системе являются реальными,Моделированию подвергается приводпланетарного движения, т.е. двигатель привода и упругая связь междуроторами...
Устройство для моделирования процесса резания

Номер патента: 1327132
Опубликовано: 30.07.1987
Автор: Новицкий
МПК: G06G 7/48
Метки: моделирования, процесса, резания
...температурев зоне резания: шсС+ 8 (С ц + С Р + 1 с Рс) ае ЛР(д)р 8 сР)чЬ1) масса стружки;теплоемкость стружки,температура в зоне резания;тепловая проводимость изделия и резца соответственно;площадь поверхности стружки;коэффициент теплоотдачистружки;диаметр обрабатываемого изгде ш В ф Р32 2ной подачи инструмента и глубины резания в соответствии с моделируемойзадачей обработки иэделий. Сигналыотображающие законы изменения управляющих воздействий по соответствующим координатам, подаются на входысумматоров группы, На выходах сумматоров формируются сигналы управляющих воздействий с наложенными случайными составляющими, На один входблока 6 задается сигнал, пропорциональный угловой скорости вращениязаготовки, на другой вход -...
Предыдущий патент: Функциональный аналого-цифровой преобразователь
Следующий патент: Сеточная модель
Случайный патент: Способ подготовки жидкости к анализу ее оптических свойств