Способ определения навигационных параметров
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1098382
Автор: Громов
Текст
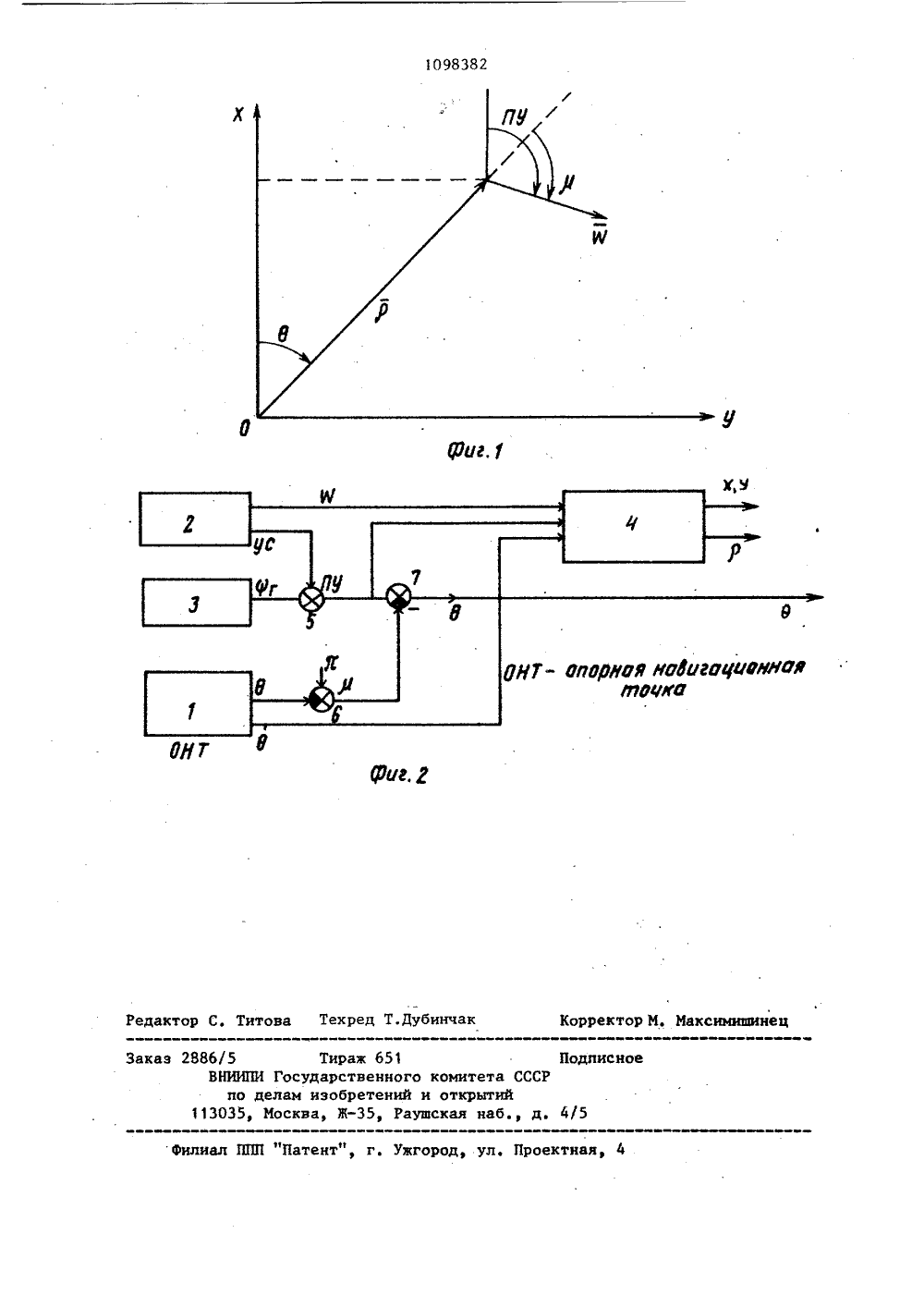
-с,е е се,е, Е 0 1 2- ования относи порядок диф ельно векто где леренцир ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ ИОТНРЫТИЙ(57) Способ определения навигационныхпараметров объекта, движущегося потраекториям, отличным от движениявдоль линии, соединяющей текущее местоположение объекта с опорной навигационной точкой, включающий измерениесоставляющих ускорения или скоростиили местоположения в проекциях на осинавигационной системы координат с началом в опорной навигационной точке,о т л н ч а ю щ и й с я тем, что,с целью повышения точности определения навигационных параметров, дополнительно измеряют угловое рассогласование или между направлением из опорной навигационной точки на объект инаправлением скорости движения объекта, или между направлением скоростидвижения объекта и направлением ускорения, или между направлением изопорной навигационной точки на объект и направлением ускорения, определяют модуль и составляющие в проекциях на оси навигационной системы координат с началом в опорной навигационной точке или угловой скорости вращения, направленной по оси аппликат вра- Э ЯО 10 8382 А щающейся прямоугольной системы коор-.динат, вектора местоположения илискорости движения объекта, являющегося вектором меньшего порядка из исходного и определяемого, в плоскостиосей абсцисс и ординат вращающейсяпрямоугольной системы координат,ось абсцисс которой совпадает с направлением от опорной навигационнойточки на объект или с направлениемскорости - вектором меньшего порядка, ось аппликат направлена перпендикулярно плоскости векторов исходногои определяемого параметров, а ось ординат дополняет две другие оси доправой системы координат, или углового ускорения, направленного по осиаппликат вращающейся прямоугольнойсистемы координат, вектора местоположения в плоскости осей абсцисс иординат вращающейся прямоугольнойсистемы координат, ось абсцисс которой совпадает с направлением отопорной навигационной точки на объект, ось аппликат направлена перпендикулярно плоскости векторов местоположения и ускорения, а ось ординатдополняет две другие оси правой системы координат, и определяют состав"ляющие искомого параметра по составляющим исходного параметра в соответствии с зависимостью:109местоположения, имеющего нулевой порядок, причем вектор скорости имеетпервый порядок, вектор ускорения -второй порядок,вИ;"1;1 - составляющие в проекциях на осй навигационной системыкоординат с началом в опорной навигационной точке вектора определяемого параметра в -"порядка;ю;- составляющие в пройм, (1, (1)зекциях йа оси навигационной системыкоординат с началом в опорной навигационной точке вектора исходногопараметра 1 -порядка,,1 С -Е 1,вЕс) ф "у,1 тЕ, ю "вгз модуль н проекции на оси навигационнойсистемы координат с началом в опорной навигационной точке или вектораугловой скорости вращения, направлен.ной по оси аппликат вращающейся прямоугольной системы координат, вектора меньшего порядка (или местоположения, или скорости), возникающегопод действием вектора большего порядка (или скорости, или ускорения) изисходного и определяемого, в плоскос"ти осей абсцисс и ординат вращающейся прямоугольной системы координат,ось абсцисс которой совпадает по на 8382правлению с вектором меньшего порядка (местоположения или скорости), ось аппликат направлена перпендикулярно плоскости исходного и определяемого векторов, а ось ординат дополняет две другие оси до правой системы координат, или вектора углового ускорения, направленного по оси аппли. кат вращающейся прямоугольной системы координат, вектора местоположения, возникающего под действием вектора ускорения, в плоскости абсцисс и ординат вращающейся прямоугольной системы координат, ось абсцисс которой совпадает по направлению с вектором местоположения, ось аппликат направлена перпендикулярно плоскости вектора местоположения и ускорения, один из которых является исходным, а другой определяемым; а ось ординат дополняет две другие оси до правой системы координат;а 6 - дрию 1 ю ас 1; Ь =4 с 1 р ВЯ ещ 1 в "е И9 В 4Изобретение относится к области навигационных измерений, а именно к определению навигационных параметров движущихся объектов,Известен способ определения нани гационных параметров движущихся объ-. ектов, а именно координат местоположения, а также составляющих вектора скорости и ускорения, согласно которому по измеряемым составляющим нави гационных параметров (например, вектора скорости) интегрированием определяют текущие координаты движущегося объектаОсновным недостатком такого способа является нарастание ошибок счисления координат местоположения с течением времени, что вызвано интегрированием ошибок измерений вектора скорости. 20 2Наиболее близким техническим решением к предложенному является способ определения навигационных параметров объекта, включающий измерение составляющих ускорения или скорости или местоположения в проекциях на оси навигационной системы координат с началом в опорной навигационной точке.Основным недостатком способа является возрастание ошибки вычисления текущих навигационных параметров во времени, что обусловлено тем, что определение координат ведется путем интегрирования текущих измерений, содержащих собственные погрешности. Определение навигационных параметров путем дифференцирования текущих измерений также приводит к увеличению погрешностей счисления.3 1098382 4Цель изобретения - повышение точ- ставляюшим исходного параметра вности определения навигационных па- соответствии с зависимостью:раметров. Ь - с 4 с ;е .ез е сЪр:а Указанная цель достигается тем, что в способе определения навигационных параметров объекта, движущегося по траекториям, отличным от движения вдоль линии, соединяющей текущее местоположение объекта с опорной нае) Л) 1 Р)вигационной точкой, включающем изме рение составляющих ускорения или скорости или местоположения в проекциях на оси навигационной системы координат с началом в опорной навигационной точке, дополнительно измеряют 15 угловое рассогласование или между направлением из опорной навигационной точки на объект и направлением скорости движения объекта, или между направлением скорости движения объекта и направлением ускорения, или между направлением из опорной навигационной точки на объект и направлением ускорения, определяют модуль и составляющие в проекциях на25 оси навигационной системы координат с началом в опррной навигационной точке или угловой скорости вращения, направленной по оси аппликат вращающейся прямоугольной системы координат, вектора местоположения или скорости движения объекта, являющегося вектором меньшего порядка из исходного и определяемого, в плоскости осей абсцисс и ординат вращающейся прямоугольной системы координат, ось 35 абсцисс которой совпадает с направлением от опорной навигационной точки на объект или с направлением скорости - вектором меньшего порядка, ось аппликат направлена перпендикулярно 40 плоскости векторов исходного и определяемого параметров, а ось ординат дополняет две другие оси до правой системы координат, или углового ускорения, направленного по оси ап пликат вращающейся прямоугольной системы коррдинат, вектора местоположения в плоскости осей абсцисс и ординат вращающейся прямоугольной системы координат, ось абсцисс кото О рой совпадает с направлением от опор. ной навигационной точки иа объект, ось аппликат направлена перпендикулярно плоскости векторов местополо.жения и ускорения, а ось ординат до полнйет две другие оси до правой системы координат, и определяют составляющие искомого параметра по со" где т, 1= 0; 1; 2 - порядок дифференцирования относительно вектора местоположения, имеющуго нулевой по" рядок, причем вектор скорости имеет первый порядок, вектор ускорения - второй порядок,тоФР) 3 1 - составляющие вектора определяемого параметра-го порядка;И)ф) - составляющие вектора исходного параметра 1-го порядка;а-Я))Е(с) э т Е,1) Е,г е )ы,З модуль и проекции на оси навигационной системы координат с началом в опорной навигационной точке или вектора угловой скорости вращения, направленной по оси аппликат вращающейся системы координат, вектора меньше порядка (ипи местоположения, или скорости), возникающего под действием вектора большего .порядка (или скорости, или ускорения) из исходного и определяемого, в плоскости осей абсцисс и ординат вращающейся прямоугольной системы координат, ось абсцисс которой совпадает по направлению с вектором меньшего порядка (местоположения или скорости), ось аппликат направлена перпендикулярно плоскости исходного и определяемого векторов, а ось ординат дополняет две другие оси до правой системы координат, или вектора углового ускорения, направленного по оси аппликат вращающейся прямоугольной системы координат, вектора местоположения, возникающего под действием вектора ускорения, в плоскости абсцисс и ординат вращающейся прямоугольной системы координат, ось абсцисс которой совпадает по направлению с вектором местоположения, ось аппликат направлена перпендикулярно ппоскости вектора местоположения и ускорения, один из которых является исходным, а другой определяемым, а ось ординат дополняет1098382 6ко- получимМбб ЦХ= со 5 (ПУ- ц)Юзтиь) (ПУ-,ц, ),(г) ЬР=),1+ф Р 1; с=-1еТакой способ позволяет исключить дополнительные погрешности счислениянавигационных параметров, возникающие при операциях интегрированияи дифференцирования,На фиг. 1 представлена прямоугольная система координат ОХУ, началокоторой совпадает с опорной навигационной точкой (с радиомаяком); наФиг. 2 - Функциональная схема устройства,реализующего предложенный способ.В качестве примера реализации пред.ложенного способа рассмотрим навигационную систему определяющую текущее местоположение объекта. Системасодержит координатор цели 1, допплеровский измеритель 2 скорости и угласноса, курсовую систему 3, вычисли- фтель координат 4, сумматоры 5, 6, 7,На борту подвижного объекта с помощью бортовых измерителей определяются следующие параметры движения:угловая скорость линии визирования 6 Ии курсовой угол радиостанции 9 (координатором цели 1); модуль скоростиы и путевой угол (ПУ) (соответственно допплеровским измерителемскорости и угла сноса и курсовой 40системой 31.При этомПУ= Ч+ УС,где ),. -гироскопический курс; УС -угол сноса.Угол с между радиусом-векторомри вектором скорости (см. фиг. 1) определяется из соотношения: р =T- Е . ффТогда, используя зависимость дляопределения навигационныхпараметров. ле (1)две другие оси до правой системыординат;и.- угол между направлениямивекторов;Ьт 0 в 1Ри ъ 1 ф р= с="; Ь 1=4 ус 1 47) е Устройство работает следующим образом.Допплеровский измеритель 2 скорости и угла сноса измеряет линейную)скорость объекта, посылая сигнал навход вычислителя координат 4, и уголсноса, значение которого складывается в сумматоре 5 с величиной гироскопического курса ) которая поступает с выхода курсовой системы 3,Выход сумматора 5 подключен ко вто"рому входу вычислителя координат.Координатор цели 1 измеряет углы 6и 6, значения которых поступают навход сумматора 6 и на третий входвычислителя координат 4 соответственно. На другой вход сумматора 6 поступает сигнал, пропорциональный значению угла Т . Выход сумматора 6 подключен ко входу сумматора 7, на другой вход которого подается сигнал,пропорциональный путевому углу. В вычислителе координат 4 реализуетсяформула (2),Рассмотренное устройство является одним из возможных ус.тройств реализующих предложенный способ,Возможно реализовать способ с помощью других устройств, которые будут отличаться от рассмотренногоэ количеством и составом измерительной аппаратуры для измерения части навигационных параметров, но определение неизвестных навигационных параметров будет по-прежнему производится по форму(еуэ Предложенный способ позволяет существенно повысить точность счисления навигационных параметров, таккак ошибки определения навигационных параметров в этом случаене возрастают с течением време" 55"Патент",Ужгород, ул. Проектна Фили 5 Тираж 653 Государственног по делам изобретений 13035, Москва, Ж, Ра
СмотретьЗаявка
3308387, 16.06.1981
ПРЕДПРИЯТИЕ ПЯ В-2749
ГРОМОВ Г. Н
МПК / Метки
МПК: G01C 21/16
Метки: навигационных, параметров
Опубликовано: 23.05.1985
Код ссылки
<a href="https://patents.su/5-1098382-sposob-opredeleniya-navigacionnykh-parametrov.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения навигационных параметров</a>
Способ измерения радиальной компоненты вектора скорости вращающегося потока в цилиндрическом канале

Номер патента: 1516985
Опубликовано: 23.10.1989
МПК: G01P 3/36
Метки: вектора, вращающегося, канале, компоненты, потока, радиальной, скорости, цилиндрическом
...а выходом - с анализатором 16 спектра,Способ осуществляют следующим образом,В исследуемое сечение цилиндрического канала направляют два зондирующих пучка 1 ЛДА 2, располагая их в плоскости сечения (фиг,2). Для исследования радиального проФиля радиальной компоненты вектора скорости ч,(г) начальную точку измерениягустанавливают в центре цилиндрического кацапа (точка О), перемещая ЛДА относительно канала (цлц наоборот) в радиальном направлении ОА, устанавливают новые положения точки измерения, Однако вследствие рефракции пучков ца цилиндрических стенках тачка измерения смещается покривой ОА , причем в каждой ионой точке в результате разворота вектора чувствительности ЛДА К (ортогонального бцссектриссе угла сведения пучков и лежащего н их...
Устройство для записи угловой скорости и углового ускорения в суставах конечностей или шарнирах протезов-

Номер патента: 166448
Опубликовано: 01.01.1964
Авторы: Корюкин, Морейнис, Широков
Метки: записи, конечностей, протезов, скорости, суставах, углового, угловой, ускорения, шарнирах
...и угловой скорости (см. фиг. 2) в качестве одного из плеч измерительного моста. Другим плечом этого моста служит со противление 5. Сигнал для регистрации углапоступает с сопротивления б. Злектрическое дифференцирование осуществляется при помощи конденсатора 7, реагирующего на изменение величины напряжения, пропорционально го величине угла поворота движка потенциометра 1, Последовательно конденсатору включено сопротивление 8, с которого на осциллограф подается сигнал, пропорциональнын величине угловой скорости. Источником питания 20 в схеме служит батарея 9. Аналогично построена схема для регистрации углового ускорения - дифференцирующая цепочка РС построена на конденсаторе 10 и сопротивлении 11, с которого сигнал подается на осцилло...
Магнитогидродинамический способ измерения вектора скорости электропроводной жидкости

Номер патента: 460500
Опубликовано: 15.02.1975
Авторы: Грилихес, Цитлик, Чупров
МПК: G01P 5/00
Метки: вектора, жидкости, магнитогидродинамический, скорости, электропроводной
...состоит из трех обмоток 1 - 3, оси которых сдвинуты на 120 и расположены в плоскости, параллельной плоскости движения жидкости. Обмотки заключены в диэлектрический корпус 4, на основании 5 которого, параллельном плоскости движения и контактирующем с жидкостью, размещены электроды; центральный 6 и периферийные 7. Напряжение на обмотки подается от источника трехфазного тока 8. Величина и фазанапряжения, снимаемого с электродов, измеряются измерительным прибором 9.Вращающееся магнитное поле индуктируетв движущейся жидкости электрическое поле,вектор напряженности Е которого направленпо оси ОХ, а величина его изменяется синусоидально во времени с угловой частотой оз,равной угловой скорости вращения векторамагнитной индукции В,Е =...
Способ измерения составляющей вектора скорости потока газа или жидкости

Номер патента: 885891
Опубликовано: 30.11.1981
Автор: Иванов
МПК: G01P 5/06
Метки: вектора, газа, жидкости, потока, скорости, составляющей
...характеристики в ряд фурье содержит кроме первой гармоники только нечетные гармоники, сумма которых определяет отклонение реальной угловой характеристики от идеальной и величину погрешности при измерениях составляющей вектора скорости потока. Амплитуда гармоник в спектре разложения реальных измерительных преобразователей составляющей скорости потока быстро убывает с увеличением номера гармоники. Поэтому для уменьшения погрешности достаточно скомпенсировать низшие нечетные гармоники, начиная с третьей. Количество компенсируемых гармоник определяется требованиями к точности измерений.В общем случае величины углов и весовых коэффициентов могут быть найдены путем системы решений системы уравнений, .составленной с учетом следующих...
Способ термоанемометрических измерений пульсаций вектора скорости потоков

Номер патента: 1046685
Опубликовано: 07.10.1983
Авторы: Бормусов, Габитов, Глебов
МПК: G01P 5/12
Метки: вектора, измерений, потоков, пульсаций, скорости, термоанемометрических
...высокотурбулентных потоков,Для достижения поставленной целив способе термоанемометрических измерений пульсаций вектора скоростипотока, заключающемся в помещениичувствительного элемента в исследуемую среду, нагревании его протекающим электрическим током от источника, регистрации изменения электрического сопротивления чувствительного элемента и компенсации изменения сопротивления дополнительнымэлектрическим током, подаваемымна чувствительный элемент по цепиобратной связи, Формировании выходного сигнала, пропорциональногодополнительному электрическому токув цепи обратной связи, и определении 60величины пульсаций вектора скорости,отслеживают тепловой след от чувствительного элемента, меняя знаквыходного сигнала при развороте теплового...
Предыдущий патент: Рентгенографический способ определения скорости звука продуктов взрыва
Следующий патент: Способ отбора растений из популяции гибридов пшеницы
Случайный патент: 242139