Способ следящего управления приводами измерительных роботов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1089390
Авторы: Евстигнеев, Колискор, Модестов

Текст
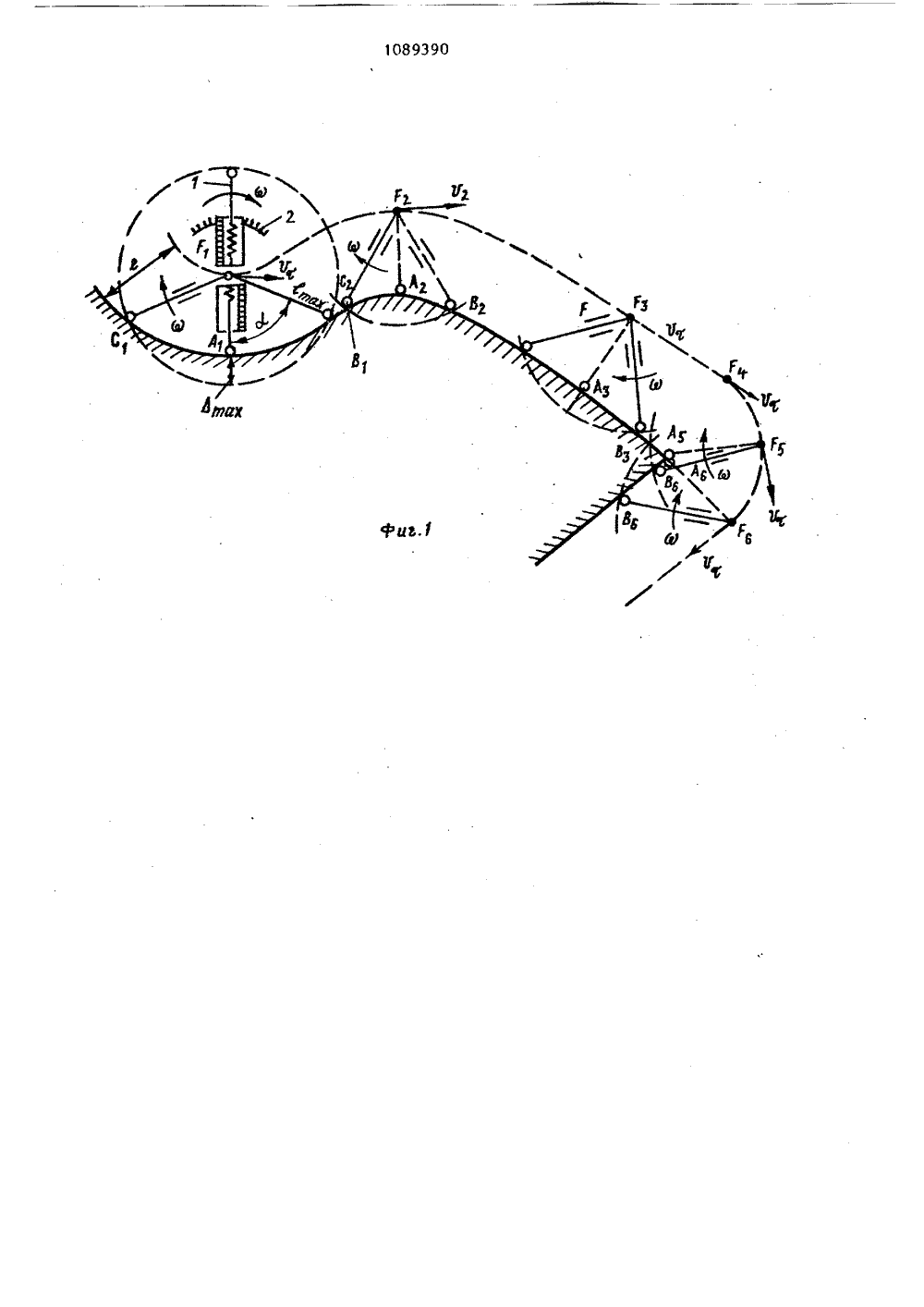
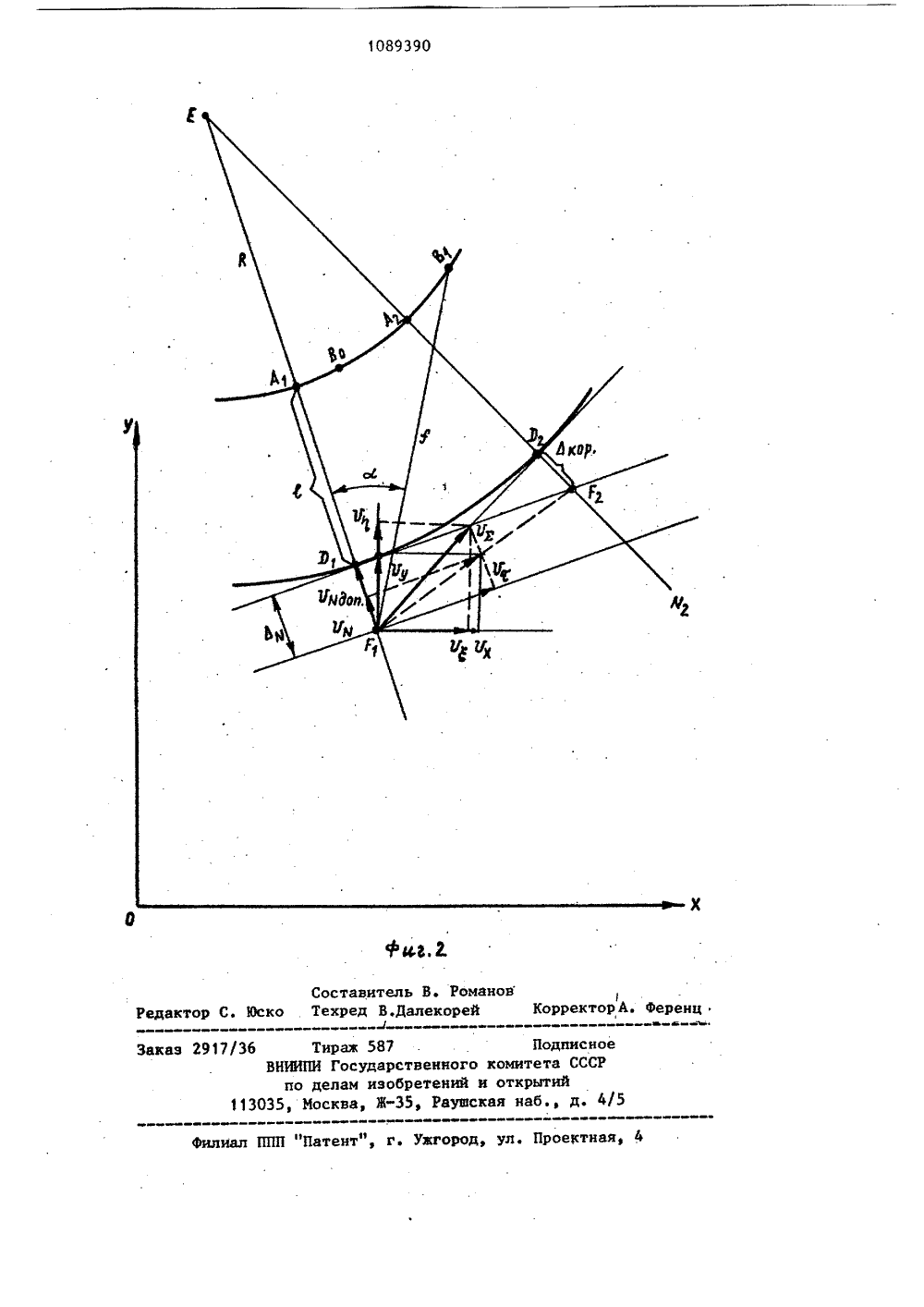
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИРЕСПУБЛИК ЯО,89390 01 В 5/2 3(5 ОСУДАРСТВЕННЫЙ КОМИ 0 ДЕЛАМ ИЗОБРЕТЕНИЙ СССР ТКРЬГГИИ(56) 1. Авторское свидетельстР 328330, кл. С 01 В 7/28, 192. Авторское свидетельствопо заявке У 2582842/25-28,кл. С 01 В 5/20, 1978.(54)(57) СПОСОБ СЛЕДЯЩЕГО УПРАВЛЕПРИВОДИИ ИЗМЕРИТЕЛЬНЫХ РОБОТОВ,ключающийся в том, что чувствителму элементу задают направление искорость обхода контура (по касатной к контуру) при заданном эквидтантном удалении, периодически сданной частотой измеряют в текущеточке координаты чувствительногоэлемента, направление нормапи ктуру и отклонение эквидистантногоудаления (рассогласование), опредляют значение Ч составляющей скорости, направленной по нормали ктуру и корректирующей величину эк дистантного удаления, после чего изменяют величину координатных скоростей в соответствии с найденной поправкой, о т л и ч а ю щ и й с я тем, что, с целью повышения точности обхода контура, дополнительно измеряют в каждом цикле измерения координаты хотя бы одной впереди лежащей точки контура и на основании данных о координатах точек, измеренных в текущем и предыдущем циклах измерения, определяЬт дополнительную корректирующую скорость по нормали Ч как Ч 1 Ф,оп где д - расстояние по нормали между точкой с координатами ЗИ+Ч ш (+Чу(ф и эквидис тантной к гладкбй непрерывной линии, проведенной че- С рез и точек контура, полученных в текущем и предыдущем циклах измерения; Ч,Чу - значения координатных скоростей без учета корректирующей поправки Ч и,М - частота циклов измерения; ОО ВУ - текущие координаты чувстви- Ютельного элемента. СЭ1089 30 1Изобретение относится к измерительной технике, а именно к способам управления приводами измерительныхроботов, работающих в режиме следящего управления.Известны способы следящего управления приводами измерительных роботов, заключающиеся в том, что чувстви" тельному элементу задают направление и скорость перемещения по одной из 1 О координат (ведущей), измеряют координаты чувствительного элемента и вели-, чину отклонения (рассогласования) по второй (ведомой) координате, и задают приводу Ведомои координаты скорость пропорциональную величине рассогласования13Способ прост в реализации, но использование приводов с низкой добротностью приводит к значительным ошибкам вследствие большой величины рассогласования и неустойчивости движения при изломах контролируемого контура. Обход замкнутого контура в декартовых координатах или контура с поднутрением в полярных координатах без дополнительной информации невозможен.Наиболее близким к предлагаемому по технической сущности следящего управления приводами измерительных роботов, заключающийся в том, что чувствительному элементу задают направление и скорость обхода контура (по касательной к контуру) при заданном эквидистантном удалении, периодически с заданной частотой измеряют в текущей точке координаты чувствительного элемента, направление нормали к контуру и отклонение эквидистант ного удаления, определяют значение4 О Чы составляющей скорости, направленной по нормали к контуру и корректирующей величину эквидистантного уда- . ления, после чего изменяют значения скоростей в соответствии с найденной поправкой, которую принимают пропорциональной отклонению эквидистантного удаления 2 3.Однако способ характеризуется недостаточной точностью, являющейся следствием низкой добротности привода, и неустойчивостью движения при изломах контролируемого контура.Цель изобретения - повышение точности обхода контура.55Поставленная цель достигается согласно способу следящего управления приводами измерительных роботов,390 2заключающемуся в том, что чувствительному элементу задают направление и скорость обхода контура (по.касательной к контуру) при заданномэквидистантном удалении, периодически с заданной частотой измеряютв текущей точке координаты чувствительного элемента, направление нормали к контуру и отклонение эквидистантного удаления (рассогласование), определяют значение Ч 1 составляющей скорости, направленной нонормали к контуру и корректирующейвеличину эквидистантного удаления,после чего изменяют величину координатных скоростей в соответствии снайденной поправкой, дополнительноизмеряют в каждом цикле измерениякоординаты хотя бы одной впереди лежащей точки контура и на основанииданных о координатах точек, измеренных в текущем и предыдущем циклахизмерения, определяют дополнительнуюкорректирующую скорость по нормалигде йко - расстояние по нормалимежду точкой с координатами Х+Чш; +Чу 1 ши эквидистантной к гладкойнепрерывной линии, проведенной через. и точек контура, полученных в текущем и предыдущем циклахизмерения,Ч ,Ч, - значения координатных скоростей без корректирующейпопРавки У 1 дп,Ф - частота циклов измерения;)(, У - текущие координаты чувствительного элемента.На фиг 1 представлена схема чувствительного элемента, реализующегоспособ; на фиг.2 - схема, поясняющаяспособ,Чувствительный элемент может быть выполнен в виде датчика 1 линейных перемещений контактного или бесконтактного типа, непрерывно вращающегося (или качающегося) в плоскости измерения вокруг оси Г 1 с частотой М. Угловое положение вращающегося датчика измеряется с помощью датчика 2 угловых перемещений. Во время взаимодействия чувствительного элемента с объектом измерения происходит измерение угла и модуля вектора текущего расстояния от оси вращения Г до профиля объекта измерения,10893 20 Экстремальные показания датчика линейных перемещений достигаются при минимальном расстоянии от оси вращения до профиля.Чувствительный элемент может изме рять координаты точек профиля, расположенных на нормали к профилю, проходящей через ось вращения чувствительного элемента, а также других точек, расположенных под заданным углом к упомянутой нормали. Вариантом технического решения является измерение угла между нормалью и направлением на точку, удаленную от оси вращения чувствительного эле мента на заданное расстояние.На фиг.1 показаны типичные участки профилей, которые могут быть измерены в режиме следящего управления.При движении вдоль прямолинейного участка или участка с малой кривизной скорость М будет направлена параллельно касательной к профилю1 2 325При обходе углов, например наружных, кратчайшее расстояние от центра чувствительного элемента до контура будет измеряться по отрезку, проходящему через вершину угла (точки Р , 30 Г. и - ), а скорость Ч будет направлена по касательной к дуге окружности с центром в точке А.Способ следящего управления приводами измерительного робота реализуется следующим образом.Чувствительному элементу измерительного робота, приводы. которого работают в координатной системе ХОУ (фиг.2), задают направление и скорость Ч обхода контура эквидистантным удалением 1 А В определяемую, например, из дойустимого максимального значения одной из координатных скоростей. Измерение текущих коорди нат чувствительного элемента выпол- . няют .с частотой Ж .При взаимодействии чувствительно- го элемента с текущей точкой А( контура определяют координаты Х и У50 точки Рявляющейся центром чувствительного элемента, направление ЕЙ нормали к контуру и отклонение Ь величины эквидистантного удаления (рассогласование). На основании этих данных с помощью ЭВИ вычисляют коор 55 904динаты Х и У текущей точки А контура и величину ноправки Нм скорости, компенсирующей величину й рассогласования, Кроме того, в этом же цикле измерения измеряют расстояниеи угол о( до впереди лежащей точки В профиля и на основании этих данйых определяют координаты точки В. Точку В 1 обычно выбирают несколько впереди ожидаемой точки А , подлежащей измерению в следующем цикле измерения. На основании данных о координатах точек А и В и измерен 1ной в предыдущем цикле измерения точки В 0 прогнозируют положение точки А подлежащей измерению в слегдующем цикле измерения. Для этого вычисляют координаты центра кривизны Е гладкой непрерывной линии, проведенной через упомянутые точки (для трех точек-окружности) и значение Й радиуса кривизны.Одновременно прогнозируют положение точки Ргв которую должен придти центр чувствительного элемента без учета дополнительной поправки, Координаты точки "- принимают равнымиУ Ч,Х фХ + - .У = У + -г1 Ш1 Щгде ЧХ и М, - координатные составляющие скорости чувствительного элемента, определяемые заданной скоростью ;Ч, обхода контура и поправкой Ч корректирующей рассогласование.Положение прогноэируемой точки А принимают на пересечении упомянутой аппроксимирующей окружности и прямой ЕЕгеНа основании полученных данных вычисляют дополнительную скоростную поправкуЧцо которую принимают равной Чуоп-корОгде Др=Е"В- Я (прогноэируемая ошибка эквидистантного удаления).Приводам задают физические скорости Ч и Ч , являющиеся проекциями суммарнЬй скорости - на оси координат.Применение предлагаемого способа следящего управления приводами измерительных роботов значительно уменьшает величину рассогласования даже при низких добротностях привода и позволяет обходить практически любые контуры, в том числе имеющие изломы.1089390 Составитель В. Романово Техред В,Далекорей КорректорА. ФереФЮ дактор С. з 2917/3 Тираж 587 ПодписнИИПИ Государственного комитета СССпо делам изобретений и открытийМосква, Ж"35, Раувская наб., д. ггЗО нал ППП "Патент", г. Ужгород, ул. Проектная, 4
СмотретьЗаявка
2910200, 11.04.1980
ИНСТИТУТ МАШИНОВЕДЕНИЯ ИМ. А. А. БЛАГОНРАВОВА
ЕВСТИГНЕЕВ ВЛАДИМИР НИКОЛАЕВИЧ, КОЛИСКОР АЛЕКСАНДР ШУЛИМОВИЧ, МОДЕСТОВ МИХАИЛ БОРИСОВИЧ
МПК / Метки
МПК: G01B 5/008
Метки: измерительных, приводами, роботов, следящего
Опубликовано: 30.04.1984
Код ссылки
<a href="https://patents.su/5-1089390-sposob-sledyashhego-upravleniya-privodami-izmeritelnykh-robotov.html" target="_blank" rel="follow" title="База патентов СССР">Способ следящего управления приводами измерительных роботов</a>
Способ изготовления элемента, чувствительного к влажности газа

Номер патента: 441496
Опубликовано: 30.08.1974
Авторы: Иващенко, Попов, Рудых
МПК: G01N 25/56
Метки: влажности, газа, чувствительного, элемента
...подвергается стабилизации путем циклического воздействия нэ элемент газовых средс влажности О и 100 при температуре 50 С.Способ реализуется в следую441496 3щей последовательности.Раствор влагочувствительного вещества (0,85-ный раствор поли-Е-капромида в 85,-ной муравьиной кислоте) наносят с помощью распылителя на вращающийся со скоростью 1000 аб/мин кварцевый пьезоэлемент через диафрагму диаметром 5 мм, установленную между распылителем и кварцевым пьезоэлемен-том по оси напыления струи.Через определенное время на пыление прцостанавливают и чувствительны элемент медленно сушат при температуре 20-25 С в течение 24 час. Затем раствор влагочувствительного вещества наносят на кварцевую пластину, вращающуюся со скоростью 2000 об/мин,...
Индикаторный элемент, чувствительный к аммиаку

Номер патента: 1171709
Опубликовано: 07.08.1985
Авторы: Мешковский, Новиков, Шавкунова
МПК: G01N 31/22
Метки: аммиаку, индикаторный, чувствительный, элемент
...ниже температуры кипенияраствора. При соответствующих режимахвыщелачивания и последующей термообработке образец становится пористым, причем распределение внутреннихпор по размерам близко к монодисперсному, максимум распределения приходится на 6-8 нм. Таким образом, преобладающие размеры пор примерно в100 раз ниже длин волн рабочегоучастка спектра (300-650 нм), следовательно, носитель без индикаторноговещвства прозрачен для регистрируемого света,На внутренней поверхности портвердого носителя имеется слой (сплошной или несплошной) индикаторного вещества бромкрезолового пурпурового, по лученный путем пропитки пористого твердого носителя в водном растворе бромкрезолового пурпурового индикатораи последующей сушки при температурене выше...
Способ определения скоростей, направлений и характера передвижений воды в осушаемой торфяной залежи

Номер патента: 125909
Опубликовано: 01.01.1960
Автор: Чураев
МПК: G01P 5/18
Метки: воды, залежи, направлений, осушаемой, передвижений, скоростей, торфяной, характера
...затем выявляют зону распространения этого радиоактивного индикатора путем измерения радиоактивности в ряде пунктов вокруг колодца при помощи радиозонда.Применение этого способа позволяет повысить точность определения скоростей, направлений и характера передвижения грунтовых вод.Радиозонд, применяемый для осуществления способа в осушаемой торфяной залежи, состоит из дюралюминиевого челнока 1 диаметром 45 мм и длиной 250 мм (см. чертеж). Внутри челнока помещен счетчик Троста 2 типа СТСили СТС. Чехол счетчика окружен свинцовым экраном 3 толщиной 8 мм, в котором с одной стороны сделано окно 4 размером 10 Х 50 мм для прохода регистрируемого гамма-излучения. Счетчик соединяется высокочастотным кабелем Б с полевым батарейным радиометром б....
Прибор для построения перспективы точек по их координатам в ортогональной проекции

Номер патента: 130188
Опубликовано: 01.01.1960
Автор: Колмакова
МПК: B43L 13/14
Метки: координатам, ортогональной, перспективы, построения, прибор, проекции, точек
...шесте 1 эцях, Взаимодействующих с тремя параллельными зубчатыми рейками, Средняя рейка снабжена шарниром, служащим осью врацсцця двойной кулисы, ки нсматичсскц сВязацной своими концамц с двумя д 1 угцмц зубчатымц рейками.На номограмме показаны примеры нахождения координат перспек. тивы точки, когда х=4; у=-40 (при )=40) и когда х=5; у=50 (при =50), В первом случае Х,=2; во втором - Х,=2,5,На схеме прибора (фиг. 2) все три прямолинейных шкалы номограммы превращены в зубчатые рейки 1, 2, 3, взаимодействующие с зубчатыми шестернями 4, б, б, несущими счетные логарифмические ди ски 7, 8 и 9, Зубчатая рейка 2 имеет шарнир 10, служащий осью вращения двойной кулисы 11, концы которой взаимодействуют с цапфами 12 и И, укрепленными на двух других...
Преобразователь скорости и направления потока

Номер патента: 1355870
Опубликовано: 30.11.1987
Авторы: Буйнов, Воронежский
МПК: G01C 17/02
Метки: направления, потока, скорости
...плоскости всех четырех элементов Холла лежат на оси 02, а их магниточувствительные оси перпендикулярны этой оси, Элементы Холла 11 55870 2и 13 соединены последовательно с управляемым генератором тока, напримеррезистором 15, а элементы Холла 12и 14 соединены последовательно с ана 5логичным управляемым генератором 16тока. Управляемые генераторы 15 и 16тока служат измерителями взаимно ортогональных составляющих вектора скорости потока. Два разноименных потенциальных электрода элементов Холла 11и 14 соединены последовательно, ос-.тальные их электроды подключены квыходным клеммам 1 и 18 преобразователя. Соединены последовательно и дваодноименных потенциальных электродаэлементов Холла 12 и 13. Два другиходноименных потенциальных электрода...
Предыдущий патент: Устройство для контроля размеров беговых дорожек наружных колец шариковых подшипников
Следующий патент: Устройство для замера линейной координаты продольной линии зуба
Случайный патент: Способ повторного цементирования скважин